基于Simulink 的直线电机本体建模
电磁发射课题组
2015年10月29日
1直线感应电动机的等效电路
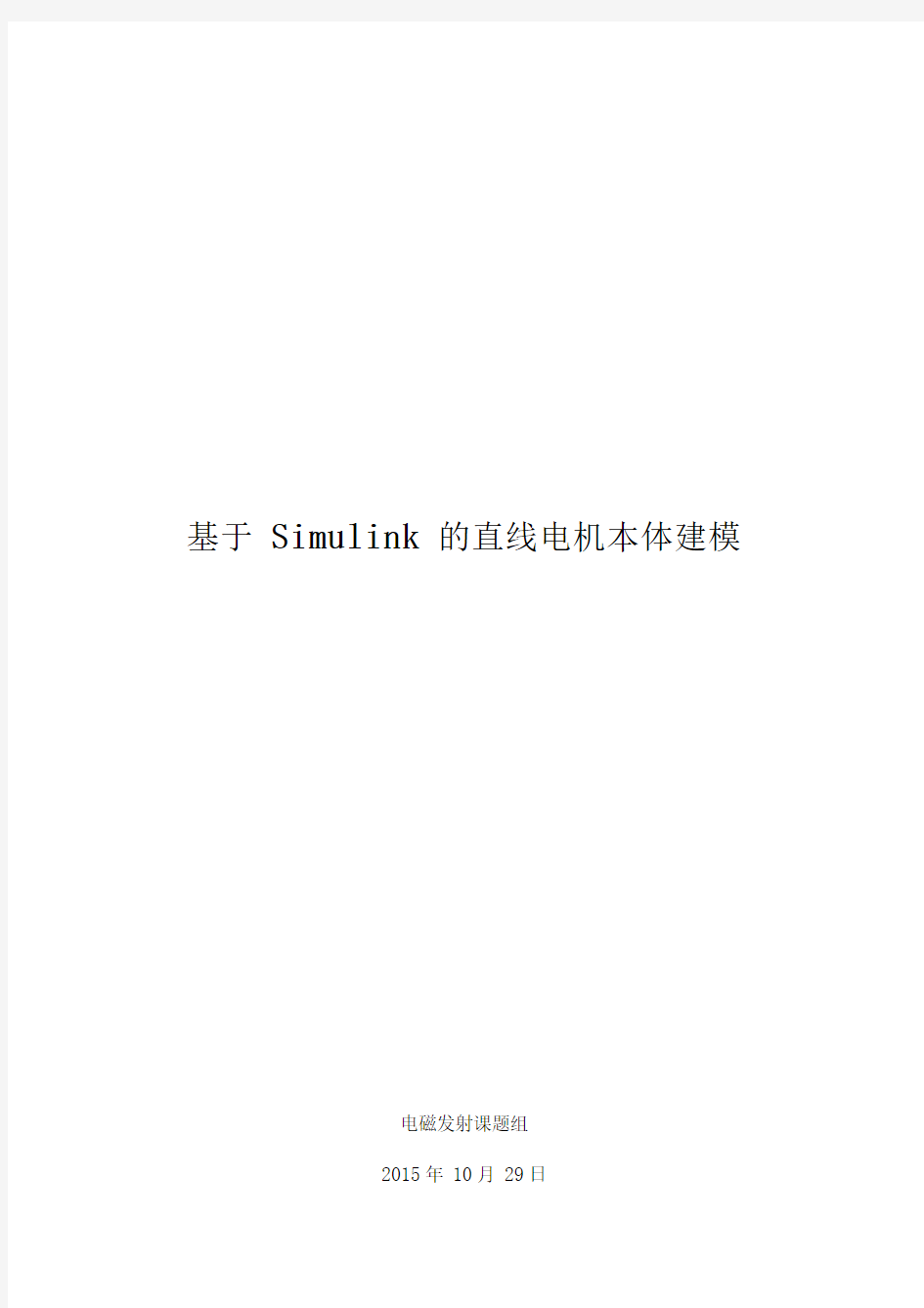
直线电机在结构上可看作是沿径向剖开并将圆周展为直线的旋转电机,如图1所示。直线感应电动机的稳态特性近似计算方法基本可以沿用旋转感应电动机的等效电路[1]
定子
图1旋转电机演变为直线电机示意图
对于旋转异步电机而言,与电机绕组交链的磁通主要有两类:类是穿过气隙的相间互感磁通;另一类是只与一相绕组交链而不穿过气隙的漏磁通,前者是主要的。定子各相漏磁通所对应的电感称作定子漏感L l s,由于绕组的对称
性,各相漏感值均相等。同样,转子各相漏磁通则对应于转子漏感L l r。
对于每一相绕组来说,它所交链的磁通是互感磁通和漏感磁通之和,因此,定子各相自感为:
L A A二L BB二L ee 二L ms ' L ls ( 1) 转子各相自感为:
2)
L aa —L bb 一L CC一L mr L l^ _ L ms L lr (
两相绕组之间只有互感,互感又分为两类:
1) 定子三相彼此之间和转子三相彼此之间位置都是固定的, 故互感为常值;
2) 定子任一相与转子任一相之间的位置是变化的,互感是角位移的函数。
由于三相绕组轴线彼此在空间的相位差为-120,因此互感为:
定转子绕组间的互感由于相互间的位置的变化,为:
L
Ab 二L
bA = L BC
= L CB = L ac = L C^ = L ms
COs二'120( 7)
L
Ac 二L CA二
L
Ba 二
L
a^
L
b^
L
C^
L
ms
cO^
~ 120( 8)
以上是针对旋转异步电机的参数的推到过程,而对于直线电机,
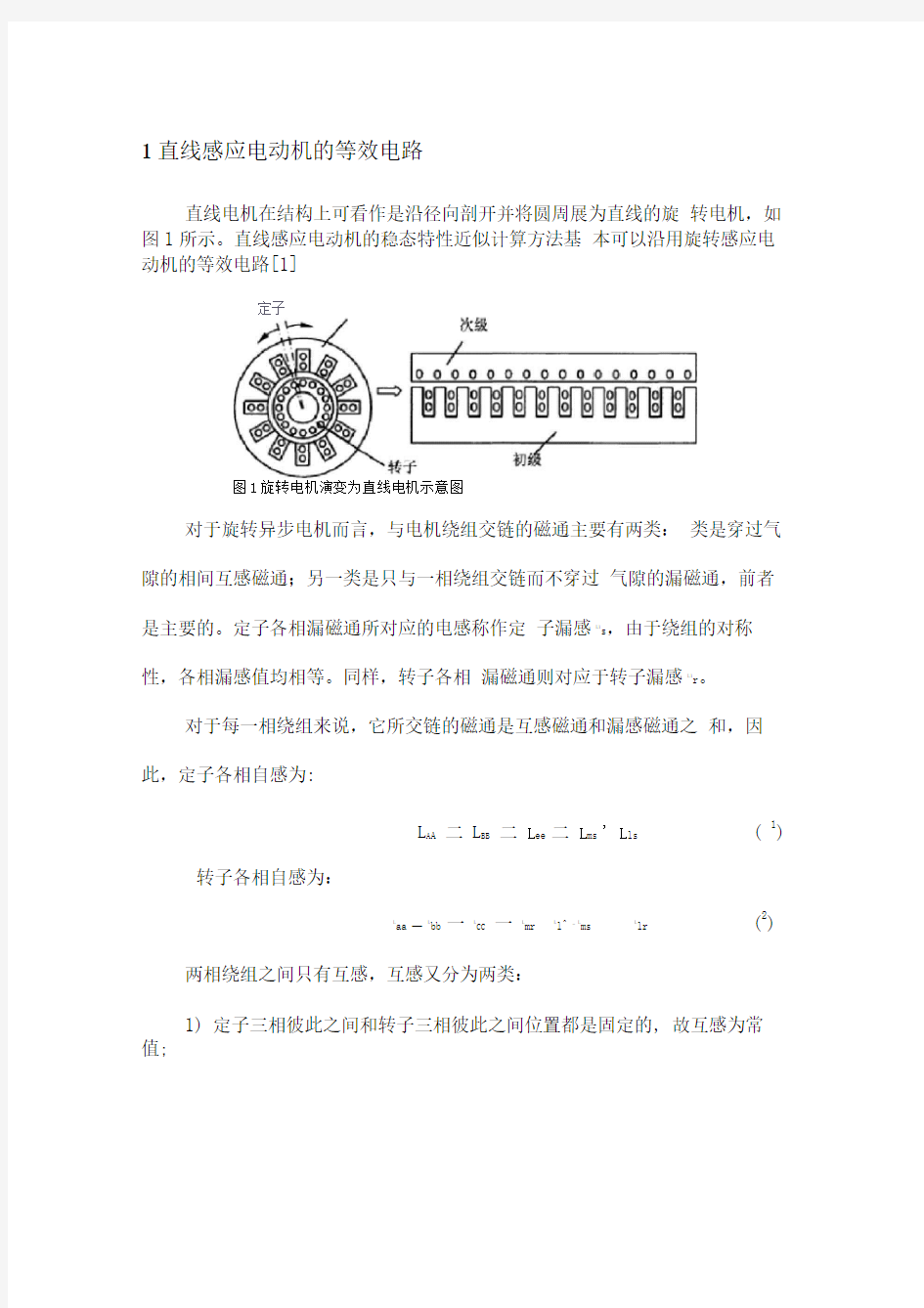
文献[3]中作者给出了圆筒形直线感应电动机的等效电路,如所示:
图2圆筒形直线电机的等效电路
图2中,R s和X s分别代表初级绕组的电阻和漏抗;R m代表励磁电阻;X m代表励磁电抗;r20代表次级表面电阻;X20代表次级表面电抗;R ed代表边端效应影响纵向边电功率产生的损耗折算成的等效电
于是:
1L_1L
(3)
(4)
(5)
L Aa = L aA = L Bb = LbB = L cC =L cc = L ms COs^ (6)
1
L ms COS 120 = L ms COS - 120 - - 2 L ms
mr
阻;R r代表在次级铜层中的折算的电阻值。
在该文献[3]中次级使用的是导电层和导磁层所构成的复合材料至于图2中的相关参数的计算过程,在该文献中都有详细的说明,不再赘述。
文献[1]中给出了计及边端效应的等效电路,如所示:
图3计及边端效应的等效电路
图3中,b o为励磁电纳(Q);r i为初级绕组电阻;x i为初级绕组漏电抗;a为次级导体电阻折算到初级的换算值,R e为边端效应消耗功率的等效电阻折算到初级的换算值。
2直线感应电机的数学模型
(1)电压方程
参看海军工程大学鲁军勇在文献[4]中给出的电压方程,即:
S-R s i ds+Mds-E VY qs
0 二RJ dr+D屮dr—3(V e—V^qr ''
,O=Rriqr+D%r+0(Ve—V^dr
式中:R s为通电段定子绕组电阻;尺为通电段定子绕组电阻;乂
为同步速度,V为动子实际速度;D为微分算子;1=二。
注释:
对上式进行简要的推导:
利用三相静止坐标系到两相任意旋转坐标系间的转换矩阵C3s 2r 可将三相静止坐标系下的定子电压方程转换到任意旋转坐标系dqO 坐标系下,即:
U A R s U B
0 R s 0
C3s/2 r
U A
U B-C3s/2 r
0 i A 0 R s」
L i c」
R s 0 0 R s
i B
d
+—
—
dt
A
屮 B
严C j
0 i A
0 i B % 0 0
U ds
3s/2 r 3s/2r
/■ ds
H」
ds I
R i C
U d^R s i ds D ds - ‘T qs U qs =R s i qs
D q^ ■■/ ds
(10)
对于转子电压方程的推导过程类似, 只是转子坐标系转换矩阵与
定子坐标系的转换矩阵不一样,即:
cost C3s 32r
、2兀
cos(4 )
3
_ 2兀
sin (片)
3
1
2
r 2兀1
COS^r -——)
3
2
兀、
si n(亠-
〒)
3
1
、2
利用该转换矩阵将转子电压方程由三相静止坐标系转换到两相任意旋转坐标系下,即:
所谓线性马达又称为直线电机,是一种将传统的旋转电机沿轴线方向切开后,将旋转电机的初 级展开作为直线电机(线性马达)的定子,次级通电后在电磁力的作用下沿着初级做直线运动,成为直线电机(线性马达)的动子。 我们常说的磁悬浮,往往和直线电机(线性马达)驱动有着很大联系。磁浮运输系统通常采用“线性马达”也就是直线电机作为推进系统的。 线性马达的构成原理 设靠三相交流电力励磁的移动用电磁石 (作为定子),分左右两排夹装在铝板两旁 (但不接触),磁力线与铝板垂直相交,铝板即感应而生电流,因而产生驱动力。由于线性感应马达的定子装在列车上,较导轨短,因此线性感应马达又称为“短定子线性马达”(Short-stator Motor);线性同步马达的原理则是将超导电磁石装于列车上 (当作转子),轨道上则装有三相电枢线圈 (作为定子),当轨道上的线圈供应以可变周波数的三相交流电时,即能驱动车辆。由于车辆移动的速度系依与三相交流电周波数成比例的同步速度移动,故称为线性同步马达,而又 由于线性同步马达的定子装于轨道上,与轨道同长,故线性同步马达又称为“长定子线性马 达”(Long-stator Motor)。 传统轨道运输系统由于使用专用轨道,并以钢轮作为支撑与导引,因此随着速度的增加, 行驶阻力会递增,而牵引力则递减,列车行驶阻力大于牵引力时即无法再加速,故一直无法突 破地面运输系统理论上最高速度每小时375公里的瓶颈。虽然法国TGV曾创下传统轨道运输系统时速515.3公里的世界纪录,但因轮轨材料会有过热疲乏的问题,故现今德、法、西、日等 国之高铁商业营运时速均不超过300公里。
因此,如要进一步提升车辆速度,必须放弃传统以车轮行驶之方式,而采用“磁力悬 浮”(Magnetic Levitation,简称“磁浮”Maglev) 的方式,使列车浮离车道行驶,以减少摩 擦力、大幅提高车辆的速度。此一浮离车道的作法,除不会造成噪音或空气污染外,并可增进 能源使用之效率。另外采用“线性马达”(Linear Motor) 亦可加快该磁浮运输系统的速度, 因此使用线性马达的磁浮运输系统应运而生。 所谓磁浮运输系统就是利用磁力相吸或相斥的原理,使列车浮离车道,此磁力的来源可分 为“常电导磁石”(Permanent Magnets) 或“超导磁石”(Super Conducting Magnets, SCM)。所谓的常电导磁石就是一般的电磁铁,即只有通电时才具有磁性,电流一切断则磁性消失,由 于列车在极高速时集电困难,故常电导磁石仅能适用于采用磁力相斥原理、速度相对较慢 (约300kph) 的磁浮列车;至于速度高达500kph以上的磁浮列车 (利用磁力相吸原理),就非使用 通一次电就永久具有磁性 (因此列车可以不用集电) 之超导磁石不可。 因磁浮运输系统是利用磁力相吸或相斥的原理,故导致其分为“电动悬 浮”(Electrodynamic Suspension, EDS) 与“电磁悬浮”(Electromagnetic Suspension, EMS) 两种型态。电动悬浮 (EDS) 是利用同性相斥的原理,当列车经由外力而移动,装置于列车上的常电导磁石产生移动磁场,而在轨道上的线圈产生感应电流,此电流再生磁场,由于此二磁场 方向相同,故列车与轨道间产生互斥力,列车随即由此互斥力举升而悬浮。因列车的悬浮是靠 两磁场作用力相互平衡而达成,故其悬浮高度可固定不变 (约10 ~ 15mm),列车即因此具有相 当之稳定性。此外,列车必须先以其他方式启动,其所带之磁场才能产生感应电流与磁场,车 辆才会悬浮;因此,列车必须装置车轮以便“起飞”与“降落”之用,当速度达40kph以上时,列车开始悬浮 (即“起飞”),车轮自动收起;同理当速度渐减不再悬浮时,车轮自动放下以便滑行 (即“降落”)。通常采用电动悬浮 (EDS) 的系统,只能以“线性同步马达”(Linear Synchronous Motor, LSM) 作为推进系统,且其速度相对较慢 (约300kph)。 电动悬浮系统 (EDS) 与线性同步马达 (LSM) 的组合 电磁悬浮 (EMS) 则是利用异性相吸的原理,列车两侧向导轨环抱 (类似跨座式单轨系统),列车环抱的下部装有电磁石,导轨的底部装有钢板代替线圈,此时导轨之钢板在上,而列车之 电磁石在下,当通电励磁时,电磁石产生之磁场吸引力吸引列车向上,列车因重力而下沉,两
直线电机基础 编辑本段直线电机也称线性电机,线性马达,直线马达 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同. 最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相.图示直线电机用HALL换相的相序和相电流. 该图直线电机明确显示动子(forcer, rotor)的内部绕组.磁鉄和磁轨.动子是用环氧材料把线圈压成的。而且,磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer, rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。 编辑本段圆柱形动磁体直线电机 圆柱形动磁体直线电机动子是圆柱形结构。沿固定着磁场的圆柱体运动。这种电机是最初发现的商业应用但是不能使用于要求节省空间的平板式和U 型槽式直线电机的场合。圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以增加行程。典型的线圈绕组是三相组成
直线电机主要应用于三个方面: 一是应用于自动控制系统,这类应用场合比较多; 二是作为长期连续运行的驱动电机; 三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 在实际工业应用中的稳定增长,证明直线电机可以放心的使用。 本期讨论直线电机的运用 Linear motor: 直线伺服电机应用 昆山佳德锐自动化系统销售中心 交流论坛: www.hilife.me 工业之美
什么是直线电机特点 1.什么是直线电机 直线电动机(或称线性马达)(Linear motor)是电动机的一种,其原理与传统的电动机不同,直线电机是直接把输入电力转化为线性动能,与传统的扭力及旋转动能不同。直线电机又分为低加速及高加速两大类,当中低加速直线电机适用于磁悬浮列车及 其他地面交通工具,而高加速直线电机能把物件在短时间内加至极高速度,适用于粒子 加速器、制造武器等。2.直线电机是如何工作的 下面简单介绍直线电机类型 和他们与旋转电机的不同,最 常用的直线电机类型是平板式, U型槽式和管式。线圈的典型组 成是三相,有霍尔元件实现无刷 换相,直线电机用HALL换相的 相序和相电流。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer,rotor) 是用环氧材料把线圈压缩在一起制成的,而且磁轨是把磁铁(通常是高能量的稀土磁铁)固 定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度) 和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙 (airgap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋 转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直 线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 3.直线电机分类 管状直线电机 圆柱形动磁体直线电机的磁路与动磁执行器相似。区别在于线圈可以复制以 增加行程。典型的线圈绕组是三相组成的,使用霍尔装置实现无刷换相。推力 线圈是圆柱形的,沿磁棒上下运动。 U型直线电机 U型槽式直线电机有两个介于金属板之间且都对着线圈动子的平行磁轨。动子由导轨系统 支撑在两磁轨中间。动子是非钢的,意味着无吸力且在磁轨和推力线圈之间无干扰力产生。 非钢线圈装配具有惯量小,允许非常高的加速度。线圈一般是三相的,无刷换相。可以用空 气冷却法冷却电机来获得性能的增强。也有采用水冷方式的。这种设计可以较好地减少磁通 泄露因为磁体面对面安装在U形导槽里。这种设计也最小化了强大的磁力吸引带来的伤害 平板直线电机 有三种类型的平板式直线电机(均为无刷):无槽无铁芯,无槽有铁芯和有槽有铁芯。选 择时需要根据对应用要求的理解。无槽无铁芯平板电机是一系列coils安装在一个铝板上。由 于FOCER没有铁芯,电机没有吸力和接头效应(与U形槽电机同)。该设计在一定某些应用中有 助于延长轴承寿命。动子可以从上面或侧面安装以适合大多数应用。这种电机对要求控制速度 平稳的应用是理想的。如扫描应用,但是平板磁轨设计产生的推力输出最低。通常,平板磁轨 具有高的磁通泄露。 无槽有铁芯:无槽有铁芯平板电机结构上和无槽无铁芯电机相似。除了铁芯安装在钢叠片 结构然后再安装到铝背板上,铁叠片结构用在指引磁场和增加推力。磁轨和动子之间产生的吸 力和电机产生的推力成正比,迭片结构导致接头力产生。 无槽有铁芯:这种类型的直线电机,铁心线圈被放进一个钢结构里以产生铁芯线圈单元。 铁芯有效增强电机的推力输出通过聚焦线圈产生的磁场。铁芯电枢和磁轨之间强大的吸引力可 以被预先用作气浮轴承系统的预加载荷。这些力会增加轴承的磨损,磁铁的相位差可减少接头力。 加工产品对比
,提高系统精确度,所以得到广泛的应用。直线电动机的种类按结构形式可分为;单边扁平型、双边扁平型、圆盘型、圆筒型(或称为管型)等;按工作原理可分为:直流、异步、同步和步进等。下面仅对结构简单,使用方便,运行可靠的直线异步电动机做简要介绍。 直线异步电动机的结构主要包括定子、动子和直线运动的支撑轮三部分。为了保证在行程范围内定子和动子之间具有良好的电磁场耦合,定子和动子的铁心长度不等。定子可制成短定子和长定子两种形式。由于长定子结构成本高、运行费用高,所以很少采用。直线电动机与旋转磁场一样,定子铁心也是由硅钢片叠成,表面开有齿槽;槽中嵌有三相、两相或单相绕组;单相直线异步电动机可制成罩极式,也可通过电容移相。直线异步电动机的动子有三种形式: (1)磁性动子动子是由导磁材料制成(钢板),既起磁路作用,又作为笼型动子起导电作用。 (2)非磁性动子,动子是由非磁性材料(铜)制成,主要起导电作用,这种形式电动机的气隙较大,励磁电流及损耗大。 (3)动子导磁材料表面覆盖一层导电材料,导磁材料只作为磁路导磁作用;覆盖导电材料作笼型绕组。 因磁性动子的直线异步电动机结构简单,动子不仅作为导磁、导电体,甚至可以作为结构部件,其应用前景广阔。 直线异步电动机的工作原理和旋转式异步电动机一样,定子绕组与交流电源相连接,通以多相交流电流后,则在气隙中产生一个平稳的行波磁场(当旋转磁场半径很大时,就成了直线运动的行波磁场)。该磁场沿气隙作直线运动,同时,在动子导体中感应出电动势,并产生电流,这个电流与行波磁场相互作用产生异步推动 直线异步电动机主要用于功率较大场合的直线运动机构,如门自动开闭装置,起吊、传递和升降的机械设备,驱动车辆,尤其是用于高速和超速运输等。由于牵引力或推动力可直接产生,不需要中间连动部分,没有摩擦,无噪声,无转子发热,不受离心力影响等问题。因此,其应用将越来越广。直线同步电动机由于性能优越,应用场合与直线异步电动机相同,有取代趋势。直线步进电动机应用于数控绘图仪、记录仪、数控制图机、数控裁剪机、磁盘存储器、精密定位机构等设备中。
doi:10.3969/j.issn.16726073.2012.01.005 都市快轨交通·第25卷第1期2012年2月热点研讨日本直线电机地铁系统的 发展与改进 曾根悟1,2 (1.日本东京大学东京;2.北京交通大学北京100044) 万传风编译 (北京交通大学北京100044) 摘要较为系统地介绍日本直线电机地铁的发展情况,指出日本直线电机地铁具有车辆断面小、建设成本低、爬坡能力强、转弯半径小、振动噪声低等特点,提出在满足安全舒适性要求、提高小半径曲线通过速度、提高直线电机地铁效率、减少或避免钢轨波磨方面需要继续改进的目标,最后总结了直线电机地铁的适用条件,并展望了直线电机地铁在中国重庆的应用前景。 关键词日本地铁;直线电机;适用条件;改进目标;应用前景;重庆 中图分类号TM359.4U12文献标志码A 文章编号16726073(2012)01001904 1902年,德国的A.Zehden提出了把直线电机定子安装在车辆上进行驱动的方案,而英国的H.Wilson 建议将直线电动机定子分段安装在地面驱动车辆。1908年,美国的Johnson提出用直线电机驱动单轨列车的设想。20世纪50年代,英国的Eric Laithwaite在曼彻斯特大学首次制成直线感应电机轨道车辆模型,并做了载人试验。当时的直线电机调速性能以及经济性、可靠性等与旋转电机相比还没有竞争力,因此很长时间内未得到实际应用。 20世纪60年代以来,随着电力电子技术、计算机控制技术的进步,采用交流调速技术、直线电机驱动的高速磁浮列车应运而生,列车不再通过黏着力牵引,而且爬坡能力更强。直线电机用于轮轨列车当然也具有 收稿日期:20111213修回日期:20111227 作者简介:曾根悟,男,日本东京大学荣誉教授,北京交通大学客座教授,长期从事直线电机地铁系统相关研究,sone0423@yahoo.co.jp 类似的优点。经过多年的不断完善,已经形成了较为成熟的直线电机轨道交通技术。目前,世界上采用直线电机轨道交通的城市和地区有日本的东京、大阪、神户、福冈、横滨和仙台,加拿大的温哥华、多伦多,马来西亚的吉隆坡,美国的底特律、纽约,韩国的龙仁以及中国的北京和广州。 1日本直线电机地铁 日本是1978年开始研究将直线电机牵引技术应用于城市轨道交通系统的。1981—1984年为基础研究阶段;1985—1987年为使用开发阶段。1990年,日本第1条直线电机地铁大阪7号线投入运营,轨面到车厢地板高度为850mm;1991年,第2条直线电机地铁东京12号线开通运营,这次地板高度稍作改进,距离轨面800mm,但仍然比目标值700mm差100mm。 在早期应用中,地铁的运营方、建设方和JSA(日本地铁协会)等所有参与者认为:直线电机地铁实现了小断面隧道就是成功的,关于系统性能和舒适性的改善就不再认真考虑。2001年,日本神户第3次应用直线电机系统时,采用了大阪技术规范。事实上,多年来该规范被默认为业界标准,只是最近几年,才由福冈来主导寻求系统性能的改善,其成果被应用到仙台。表1是日本早期采用直线电机地铁系统的主要技术参数和实例。 2日本直线电机地铁系统的优势 2.1车辆断面小 由于直线电机车辆不需要一系列传动机构,设备少,轴重轻,所以可使用小直径车轮、较小的转向架构架,车辆地板高度比原来可低60cm,在不损失车内空 91
直线电机的结构及工作原理 来源:本站整理作者:佚名2010年02月25日 17:43 分享 订阅 [导读]直线电机的结构直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相 关键词:直线电机 直线电机的结构 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理 设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动. 通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设引起涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将按费来明法则产生连续的推力F。 直线电机的特点 高速响应由于系统中直接取消了一些响应时间常数较大的如丝杠等机械传动件,使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 位精度高线驱动系统取消了由于丝杠等机械机构引起的传动误差减少了插补时因传动系统滞后带来跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。传动环节的弹性变形、摩擦磨损和反向间隙造成的运动滞后现象,同时提高了其传动刚度。 速度快、加减速过程短 行程长度不受限制在导轨上通过串联直线电机,就可以无限延长其行程长度。 动安静、噪音低由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 效率高由于无中间传动环节,消除了机械摩擦时的能量损耗。 直线电机的应用 直线电机主要应用于三个方面: 应用于自动控制系统,这类应用场合比较多; 作为长期连续运行的驱动电机; 应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 U槽无刷直线电机可以直接驱动,无需将转动转为线性运动,机械结构简单可靠。电机运行超平稳,无齿槽效应,动态响应速度极快,惯量小,加速度可达20G,速度达到10-30m/s,低速1μm/s时运动平滑,刚性高,结构紧凑,可选配直线编码器做高精度位置控制,其位置精度取决于所选编码器。
直线电机位置控制算法及仿真 1 绪论 1.1 研究背景及意义 随着工业机械自动化程度的不断升级,有力的带动了上游直线电机在中国的快速成长,国外品牌纷纷加大对中国市场的投入力度,永磁同步直线电机是一种将电能直接转化是动能的转化装置,省去了中间的转换机构,消除了机械转动链的影响,具有速度快,推力大,精度高等诸多优点,因此,广泛应用于精密和高速运行等领域。但是永磁同步直线电机是一个典型的非线性多变量系统,许多非线性因素的存在都会影响到永磁同步直线电机系统的控制性能,如没有知的负载和摩擦等。传统的PID控制方法已经不能满足于永磁机电动机的高精度场合,因此如何设计高性能的直线电机位置控制算法一直以来都是控制领域的热点问题之一。 因此,在传统PID控制方式下,针对多变量、非线性、强耦合的永磁同步直线电机系统设计了一种滑模位置控制器,弥补了常规PID控制跟踪精度不高的缺点。滑模控制具有控制精度高、抗干扰能力强、适用范围广的等优点,因此滑模控制方法已经成是永磁同步直线电机领域重点关注问题,相关研究人员对此进行了深入研究。 1.2 国内外研究现状 直线电机的研究现状 1840年Wheatsone开始提出与制作了略具雏形的直线电机。从那时至今,在160多年的历史记载中,直线电机经历了三个时期。 1840-1955年是探索实验时期: 从1840年到1955年的116年期间,直线电机从设想到实验到部分实验性应用,经历了一个不断探索,屡遭失败的过程。自从Wheatsone提出和试制了直线电机以后,最早明确的提到直线电机文章的是1890年美国匹兹堡市的市长,在
他写的一篇文章中,首先明确的提到了直线电机以及它的专利。然而,由于当时的制造技术、工程材料以及控制技术的水平,在经过断断续续20多年的顽强努力后,最终却没有能获得成功。 至1905年,曾有两人分别建议将直线电动机作为火车的推进机构,一种建议是将初级放在轨道上,另一种建议是将初级放在车辆底部。这些建议无疑是给当时直线电机研究领域的科研人员的一剂兴奋剂,以致许多国家的科研人员都投入了这些研究工作。1917年出现了第一台圆筒形直线电动机,事实上那是一种具有换接初级线圈的直流磁阻电动机,人们试图把它作是导弹发射装置,但其发展并没有超出模型阶段。 至此,从1930-1940年期间,直线电机进入了实验研究阶段,在这个阶段中,科研人员获驭了大量的实验数据,从而对已有理论有了更深一层的认识,奠定了直线电机在今后的应用基础。 从1940-1955年期间世界一些发达国家科研人员,在实验的基础上,又进行了一些实验应用工作。1945年,美国西屋电气公司首先研制成功的电力牵引飞机弹射器,它以7400kW的直线电动机是动力,成功的用4.1s的时间将一架重4535kg的喷气式飞机在165m的行程内由静止加速的188km/h的速度,它的试验成功,使直线电动机可靠性好等的优点受到了应有的重视,随后,美国利用直线电机制成的、用作抽汲钾、钠等液态金属的电磁泵,是的是核动力中的需要。1954年,英国皇家飞机制造公司利用双边扁平型直流直线电机制成了发射导弹的装置,其速度可达1600km/h。在这个阶段中,尤需值得一提的是,直线电机作是高速列车的驱动装置得到了各国的高度重视并计划予以实施。 在1840-1955年期间,是直线电机探索实验和部分实验应用时期,在直线电机与旋转电机的相互竞争中,由于直线电机的成本和效率方面没有能够战胜旋转电机,或者说,直线电机还没能找到它的专属领域,以及直线电机在设计方面也没有突破性的成功,所以直线电机在这一时期始终没有能得到有效的推广。 1956-1970年是开发应用时期: 自1955年以来,直线电机进入了全面的开发阶段,特别是该时期的控制技术和材料的惊人发展,更加助长了这种势头。在这段时期,申请直线机的专利件数也开始急速增加,该时期直线电机专利的增长率超过了所有其他技术领域的平
直线电机的应用 直线电机凭借高速度、高加速、高精度及行程不受限制等特性在物流系统、工业加工与装配、信息及自动化系统、交通与民用以及军事等领域发挥着十分重要的作用。 直线电机主要应用场合:一是应用于自动控制系统,这类应用场合比较多;其次是作为长期连续运行的驱动电机;三是应用在需要短时间、短距离内提供巨大的直线运动能的装置中。 直线电机可以在几秒钟内把一架几千公斤重的直升飞机拉到每 小时几百公里的速度,它在真空中运行时,其时速可达几千上万公里。在军事上,人们利用它制成各种电磁炮,并试图将它用于导弹、火箭的发射;在工业领域,直线电机被用于生产输送线,以及各种横向或垂直运动的一些机械设备中;直线电机除具有高速、大推力的特点以外还具有低速、精细的另一特点,例如,步进直线电机,它可以做到步距为1μm的精度,因此,直线电机又被应用到许多精密的仪器设备中,例如计算机的磁头驱动装置、照相机的快门、自动绘图仪、医疗仪器、航天航空仪器、各种自动化仪器设备等。除此之外,直线电机还被用于各种各样的民用装置中,如电动门、电动窗、电动桌、椅的移动,门锁、电动窗帘的开、闭等等,尤其在交通运输业中,人们利用直线电机制成了时速达500km以上的磁浮列车。
直线电机可以认为是旋转电机在结构方面的一种变形,它可以看作是一台旋转电机沿其径向剖开,然后拉平演变而成。近年来,随着自动控制技术和微型计算机的高速发展,对各类自动控制系统的定位精度提出了更高的要求,在这种情况下,传统的旋转电机再加上一套变换机构组成的直线运动驱动装置,已经远不能满足现代控制系统的要求,为此,近年来世界许多国家都在研究、发展和应用直线电机,使得直线电机技术发展速度加快,应用领域越来越广。 直线电机的优点是:结构简单、反应速度快、灵敏度高、随动性好、密封性好、不怕污染、适应性强(由于直线电机本身结构简单,又可做到无接触运行,因此容易密封,各部件用尼龙浸渍后,采用环氧树脂加以涂封,这样它就不怕风吹雨打,或有毒气体和化学药品的侵蚀,在核辐射和液体物质中也能应用)、工作稳定可靠、寿命长(直线电机是一种直接传动的特种电机,可实现无接触传递,故障少,几乎不需要维修,又不怕振动和冲击)、额定值高(直线电机冷却条件好,特别是长次级接近常温状态,因此线负荷和电流密度可以取得很高)、有精密定位和自锁的能力(和控制系统相配合,可做到0.001mm的位移精度和自锁能力)。 直线电机能直接产生直线运动,这一点对直线运动机械设计者和使用者有很大的吸引力。不少直线运动的机械是由旋转电机传动的,必须配置由旋转运动变为直线运动的机械传动装置,使得整个装置机构庞大,成本较高和效率较低。采用直线感应电机,不但省去了机械
直线电机和传统的旋转电机的区别 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 在机床进给系统中,采用直线电动机直接驱动与原旋转电机传动的最大区别是取消了从电机到工作台(拖板)之间的机械传动环节,把机床进给传动链的长度缩短为零,因而这种传动方式又被称为"零传动"。正是由于这种"零传动"方式,带来了原旋转电机驱动方式无法达到的性能指标和优点。 1.高速响应:由于系统中直接取消了一些响应时间常数较大的机械传动件(如丝杠等), 使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 2.精度:直线驱动系统取消了由于丝杠等机械机构产生的传动间隙和误差,减少了插补 运动时因传动系统滞后带来的跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。 3. 动刚度高:由于"直接驱动",避免了启动、变速和换向时因中间传动环节的弹性变形、 摩擦磨损和反向间隙造成的运动滞后现象,同时也提高了其传动刚度。 4.速度快、加减速过程短:由于直线电动机最早主要用于磁悬浮列车(时速可达 500Km/h),所以用在机床进给驱动中,要满足其超高速切削的最大进个速度(要求达60~100M/min或更高)当然是没有问题的。也由于上述"零传动"的高速响应性,使其
加减速过程大大缩短。以实现起动时瞬间达到高速,高速运行时又能瞬间准停。可获得较高的加速度,一般可达2~10g(g=9.8m/s2),而滚珠丝杠传动的最大加速度一般只有0.1~0.5g。 5.行程长度不受限制:在导轨上通过串联直线电动机,就可以无限延长其行程长度。 6.运动动安静、噪音低:由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动 导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 7. 效率高:由于无中间传动环节,消除了机械摩擦时的能量损耗,传动效率大大 提高。 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.
(10)授权公告号 CN 101630891 B (45)授权公告日 2011.08.17C N 101630891 B *CN101630891B* (21)申请号 200810012338.3 (22)申请日 2008.07.16 H02K 33/18(2006.01) H02K 1/34(2006.01) G05B 19/04(2006.01) (73)专利权人中国科学院沈阳自动化研究所 地址110016 辽宁省沈阳市东陵区南塔街 114号 (72)发明人苏刚 李洪谊 (74)专利代理机构沈阳科苑专利商标代理有限 公司 21002 代理人许宗富 周秀梅 US 6779982 B2,2004.08.24, CN 87200807 U,1987.11.04,CN 101051786 A,2007.10.10, CN 86204843 U,1986.12.24,(54)发明名称 一种微型直线电机及其驱动方式 (57)摘要 一种微型直线电机及其驱动方式,属于直线 电机技术领域。该电机结构包括端盖、内部铁心、 外部磁轭、线圈、线圈支架及两个磁钢,两磁钢同 极相对置于内部铁心两端,两磁钢外端分别安装 有端盖,在两端盖内,磁钢与内部铁心的外周置有 两对称的弧形磁轭,两弧型磁轭在内部铁心外周 大致成圆环型,在两弧形磁轭间形成滑道,磁轭与 内部铁心及磁轭与磁钢之间形成气隙,线圈置于 内部铁心与磁轭之间,线圈上固定有线圈支架,线 圈支架两端通过滑道穿出磁轭,线圈及线圈支架 可在磁轭间的滑道上滑动。本发明两磁钢同极相 对放置,磁路的封闭性比较好,在气隙中形成比较 均匀的磁场。本发明结构简单,适合作为微小型机 构的驱动器。 (51)Int.Cl.(56)对比文件 审查员 肖继军 (19)中华人民共和国国家知识产权局(12)发明专利 权利要求书 1 页 说明书 4 页 附图 5 页
《数控技术》大作业二 1.综述 直线电机的结构可以看作是将一台旋转电机沿径向剖开,并将电机的圆周展开成直线而形成的。其中定子相当于直线电机的初级,转子相当于直线电机的次级,当初级通入电流后,在初次级线圈之间的气隙中产生行波磁场,在行波磁场与次级永磁体的作用下产生驱动力,从而实现运动部件的直线运动。 直线电机的工作原理设想把一台旋转运动的感应电动机沿着半径的方向剖开,并且展平,这就成了一台直线感应图电动机。 初级做得很长,延伸到运动所需要达到的位置,也可以把次级做得很长;既可以初级固定、次级移动,也可以次级固定、初级移动.通入交流电后在定子中产生的磁通,根据楞次定律,在动体的金属板上感应出涡流。设产生涡流的感应电压为E,金属板上有电感L和电阻R,涡流电流和磁通密度将(费来明法则)产生连续的推力F。 2.工作原理 直线电动机的初级三相绕组通入三相交流电后,就会在气隙中产生一个沿直线移动的正弦波磁场,其移动方向由三相交流电的相序决定,如图所示。显然该行波磁场的移动速度与普通电机旋转磁场在定子内圆表面的线速度相等。 行波磁场切割次级上的导体后,在导体中感应出电动势和电流,该电流与气隙磁场作用,在次级中产生电磁力,驱动次级沿着行波磁场移动的方向作直线运行,或者利用反作用力驱动初级朝相反的方向运动。如果改变直线电动机初级绕组的通电相序,即可改变电动机的运行方向。因此直线电动机可实现往返直线运动。 3.直线电机的特点 直线电机是一种将电能直接转换成直线运动机械能而不需通过中问任何转换装置的新颖电机,它具有系统结构简单、磨损少、噪声低、组合性强、维护方便等优点。旋转电机所具有的品种,直线电机几乎都有相对应的品种,其应用范围正在不断扩大,并在一些它所能独特发挥作用的地方取得了令人满意的效果。 直线感应电动机的特点是:结构简单,维护方便;散热条件好,额定值高;适宜于高速运行;能承担特殊任务,如液态金属的运输、加工等。其缺点是气隙大,功率因数低,力能指标差,低速运行时需采用低频电源,使控制装置复杂。 4.直线电机的应用
直线电机驱动技术 直线电动机在机床进给伺服系统中的应用,近几年来已在世界机床行业得到重视,并在西欧工业发达地区掀起“直线电动机热”。 在机床进给系统中,采用直线电动机直接驱动与原旋转电动机传动的最大区别是取消了从电动机到工作台(拖板)之间的一切机械中间传动环节,把机床进给传动链的长度缩短为零。这种传动方式被称为“零传动”。正由于这种“零传动”方式,带来了原旋转电动机驱动方式无法达到的性能指标和一定优点。 (1)高速响应由于系统中直接取消了一些响应时间常数较大的如丝杠等机械传动件,使整个闭环控制系统动态响应性能大大提高,反应异常灵敏快捷。 (2)精度直线驱动系统取消了由于丝杠等机械机构引起的传动误差减少了插补时因传动系统滞后带来的跟踪误差。通过直线位置检测反馈控制,即可大大提高机床的定位精度。 (3)动刚度高由于“直接驱动”,避免了启动、变速和换向时因中间传动环节的弹性变形、摩擦磨损和反向间隙造成的运动滞后现象,同时提高了其传动刚度。 (4)速度快、加减速过程短由于直线电动机最早主要用于磁悬浮列车(时速可达500Km/h),所以用在机床进给驱动中,要满足其超高速切削的最大进个速度(要求达60~100M/min或更高)当然是没有问题的。也由于上述零传动的高速响应性,使其加减速过程大大缩短。以实现起动时瞬间达到高速,高速运行时又能瞬间准停。可获得较高的加速度,一般可达(2~10)g(g=9.8m/s2),而滚珠丝杠传动的最大加速度只有(0.1~0.5) (5)行程长度不受限制在导轨上通过串联直线电机,就可以无限延长其行程长度。
(6)动安静、噪音低由于取消了传动丝杠等部件的机械摩擦,且导轨又可采用滚动导轨或磁垫悬浮导轨(无机械接触),其运动时噪音将大大降低。 (7)效率高由于无中间传动环节,消除了机械摩擦时的能量损耗。科尔摩根PLATINNM DDL系列直线电机和SERVOSTAR CD系列数字伺服放大器构成一种典型的直线永磁伺服系统,它能提供很高的动态响应速度和加速度、极高的刚度、高的定位精度和平滑的无差运动。
直线电动机 linear motor 直线电动机 利用电能直接产生直线运动的电动机。其原理与相应的旋转式电动机相似,在结构上可看作是由相应旋转电机沿径向切开,拉直演变而成(图1)。直线电动机包括定子和动子两个主要部分。在电磁力的作用下,动子带动外界负载运动作功。在需要直线运动的地方,采用直线电动机可使装置的总体结构得到简化。直线电动机较多地应用于各种定位系统和自动控制系统。大功率的直线电动机还常用于电气铁路高速列车的牵引、鱼雷的发射等装备中。 直线电动机按原理分为直流直线电动机、交流直线异步电动机、直线步进电动机和交流直线同步电动机。以前3种应用较多。按结构可分为单边型和双边型两种。在单边型结构中,定子和动子之间受有较大的单边磁拉力;双边型结构由于两边磁拉力互相平衡,支承部分摩擦力较小,动作比较灵活。 直线电动机 直流直线电动机直流供电的直线电动机。由一套磁极和一组绕组构成。绕组中的电流有的通过电刷和换向片结构引入,称刷型;有的不经换向器和电刷,直接用导线引入,称无刷型。直流直线电动机从结构上还可分为动极式和动圈式两种。图2所示为圆柱式直流
动圈式直线电动机,由于其结构与扬声器的音圈相似,故又称为音圈式直线电动机,简称音圈电动机。其中图2a为短线圈音圈电动机,图2b为长线圈音圈电动机。 直流直线电动机由于推力与电枢电流成正比,速度与电枢电压成正比,故具有良好的线性控制特性,它与闭环控制系统配合,可以进行精密的调节和控制,适用于自动控制系统,例如计算机磁盘驱动器的磁头定位系统。 交流直线异步电动机由旋转式异步电动机演变而来。其工作原理和旋转式异步电动机相同。主要由原边和副边两部分组成,嵌有线圈的部分为原边。当多相绕组中通入电流后,电机气隙中就产生一个磁场行波,切割副边的导体而感生电流。此电流与磁场作用产生电磁力使原边和副边发生相对运动。直线异步电动机可以做成原边固定、副边可动的短副边型和副边固定、原边可动的短原边型两种结构。短原边型所用线圈数量少,比较经济,应用较多;短副边型常用于金属物体的投射。直线异步电动机常在工业自动化系统中作为操作杆的动力,用它操作自动门窗、自动开关和阀门以及各种机械手,也可用于电气铁路高速列车的牵引和鱼雷发射等。 直线步进电动机作直线步进运动的电动机。按其电磁推力产生的原理可以分为反应式和永磁感应子式两大类。 ①反应式直线步进电动机:其定子是一条开有均匀齿槽的导轨,动子是一个绕有三相绕组的E形铁心。每个铁心柱上都开有和定子齿距相等的齿槽,且各相铁心柱上的齿槽相对于定子齿槽依次错开1/3齿距。如果输入三相绕组电脉冲的顺序依次为A→B→C→A,则动子就会向左作步进运动。如果通电顺序改为A→C→B→A,则动子就向右作步进运动。在结构上也可以把E形铁心固定,让齿条作为动子。齿条的运动将与上述运动方向相反。 ②永磁感应子式直线步进电动机:定子由软铁材料制成,上面铣有均匀间隔的齿槽;动子由永久磁铁加上两个带齿的形电磁铁组成。两个电磁铁上的齿相互错开一定距离。在电磁铁线圈不通电时,动子位置由永久磁铁决定。而在两个电磁铁按一定顺序轮流通电时,将使动子以一定齿距作步进运动。如果对两个电磁铁不是轮流通电,而是使其中的电流一个按正弦变化,一个按余弦变化,则可使动子运动平滑,步距很小。其步距(位置)分辨率可以达到0.01mm以下。在要求高精度定位的场合,例如绘图仪、磁头定位机构、激光定位器和数控系统中得到较多的应用。 线性马达(直线电机)的工作原理 所谓线性马达又称为直线电机,是一种将传统的旋转电机沿轴线方向切开后,将旋转电机的初级展开作为直线电机(线性马达)的定子,次级通电后在电磁力的作用下沿着初级做直线运动,成为直线电机(线性马达)的动子。 我们常说的磁悬浮,往往和直线电机(线性马达)驱动有着很大联系。磁浮运输系统通常采用“线性马达”也就是直线电机作为推进系统的。 线性马达的构成原理 设靠三相交流电力励磁的移动用电磁石(作为定子),分左右两排夹装在铝板两旁(但不接触),磁力线与铝板垂直相交,铝板即感应而生电流,因而产生驱动力。由于线性感应马达的定子装在列车上,较导轨短,因此线性感应马达又称为“短定子线性马达”(Short-stator
河南机电高等专科学校 先进制造技术课程论文 论文题目:直线电机概述 系部:机械工程系 专业:起重运输机械设计与制造 班级:起机121 学生姓名:吴燚 学号:120125145 指导教师:安林超 2014年10月20日
绪论 直线电机也称线性电机,线性马达,直线马达,推杆马达在实际工业应用中的稳定增长,证明直线电机可以放心的使用。下面简单介绍直线电机类型和他们与旋转电机的不同。最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换相。 直线电机动子(forcer,rotor)是用环氧材料把线圈压成的。磁轨是把磁铁固定在钢上。 直线电机在过去的10年,经实践上引人注目的增长和工业应用的显著受益才真正成熟。 直线电机经常简单描述为旋转电机被展平,而工作原理相同。动子(forcer,rotor) 是用环氧材料把线圈压缩在一起制成的.而且,磁轨是把磁铁(通常是高能量的稀土磁铁)固定在钢上.电机的动子包括线圈绕组,霍尔元件电路板,电热调节器(温度传感器监控温度)和电子接口。在旋转电机中,动子和定子需要旋转轴承支撑动子以保证相对运动部分的气隙(air gap)。同样的,直线电机需要直线导轨来保持动子在磁轨产生的磁场中的位置。和旋转伺服电机的编码器安装在轴上反馈位置一样,直线电机需要反馈直线位置的反馈装置--直线编码器,它可以直接测量负载的位置从而提高负载的位置精度。 直线电机的控制和旋转电机一样。象无刷旋转电机,动子和定子无机械连接(无刷),不象旋转电机的方面,动子旋转和定子位置保持固定,直线电机系统可以是磁轨动或推力线圈动(大部分定位系统应用是磁轨固定,推力线圈动)。用推力线圈运动的电机,推力线圈的重量和负载比很小。然而,需要高柔性线缆及其管理系统。用磁轨运动的电机,不仅要承受负载,还要承受磁轨质量,但无需线缆管理系统。 相似的机电原理用在直线和旋转电机上。相同的电磁力在旋转电机上产生力矩在直线电机产生直线推力作用。因此,直线电机使用和旋转电机相同的控制和可编程配置。直线电机的形状可以是平板式和U 型槽式,和管式.哪种构造最适合要看实际应用的规格要求和工作环境。
直线电机的使用与维护 概述 直线电机也称线性电机,线性马达,直线马达,推杆马达。最常用的直线电机类型是平板式和U 型槽式,和管式。线圈的典型组成是三相,有霍尔元件实现无刷换。 工作原理 直线电机是一种将电能直接转换成直线运动机械能,而不需要任何中间转换机构的传动装置。它可以看成是一台旋转电机按径向剖开,并展成平面而成。 由定子演变而来的一侧称为初级,由转子演变而来的一侧称为次级。在实际应用时,将初级和次级制造成不同的长度,以保证在所需行程范围内初级与次级之间的耦合保持不变。直线电机可以是短初级长次级,也可以是长初级短次级。考虑到制造成本、运行费用,以直线感应电动机为例:当初级绕组通入交流电源时,便在气隙中产生行波磁场,次级在行波磁场切割下,将感应出电动势并产生电流,该电流与气隙中的磁场相作用就产生电磁推力。如果初级固定,则次级在推力作用下做直线运动;反之,则初级做直线运动。直线电机的驱动控制技术一个直线电机应用系统不仅要有性能良好的直线电机,还必须具有能在安全可靠的条件下实现技术与经济要求的控制系统。随着自动控制技术与微计算机技术的发展,直线电机的控制方法越来越多。 对直线电机控制技术的研究基本上可以分为三个方面:一是
传统控制技术,二是现代控制技术,三是智能控制技术。传统的控制技术如PID反馈控制、解耦控制等在交流伺服系统中得到了广泛的应用。其中PID控制蕴涵动态控制过程中的信息,具有较强的鲁棒性,是交流伺服电机驱动系统中最基本的控制方式。为了提高控制效果,往往采用解耦控制和矢量控制技术。在对象模型确定、不变化且是线性的以及操作条件、运行环境是确定不变的条件下,采用传统控制技术是简单有效的。但是在高精度微进给的高性能场合,就必须考虑对象结构与参数的变化。各种非线性的影响,运行环境的改变及环境干扰等时变和不确定因素,才能得到满意的控制效果。因此,现代控制技术在直线伺服电机控制的研究中引起了很大的重视。常用控制方法有:自适应控制、滑模变结构控制、鲁棒控制及智能控制。主要是将模糊逻辑、神经网络与PID、H∞控制等现有的成熟的控制方法相结合,取长补短,以获得更好的控制性能。 应用 直线电机可以认为是旋转电机在结构方面的一种变形,它可以看作是一台旋转电机沿其径向剖开,然后拉平演变而成。随着自动控制技术和微型计算机的高速发展,对各类自动控制系统的定位精度提出了更高的要求,在这种情况下,传统的旋转电机再加上一套变换机构组成的直线运动驱动装置,已经远不能满足现代控制系统的要求,为此,世界许多国家都在研究、发展和应用直线电机,使得直线电机的应用领域越来越广。 直线电机与旋转电机相比,主要有如下几个特点:一是
基于MATLAB的直线电机PID控制器设计 摘要 随着现代工业的飞快发展,控制对象日益复杂,对其的性能控制要求也不断提高,致使人们寻找更好的控制方法,其中以改进PID控制最为典型。PID控制器具有结构简单、容易实现、控制效果好、鲁棒性强等特点,是目前最稳定的控制方法之一。它所涉及的参数物理意义明确,理论分析体系完整,并为工程界所熟悉,因而在工业过程控制中得到了广泛应用。 直线电机是近年来国内外积极研究发展的新型电机之一,凭借自身的特性在以直线运动的工业控制中,有比旋转电机巨大的优越性。可广泛应用于交通运输、起重搬运、物流传输装置、国防及煤矿运输、车床进给等方面,发展前景十分广阔。 传统的比例积分微分( PID) 控制器参数往往因整定不良、性能欠佳,对运行状况的适应性很差。简单的控制又不能很好地适应对象系统特性变化时的最佳控制要求。因此,鉴于控制方法目前仍有广泛应用,对参数整定方法的研究将具有很好的应用价值。本文根据稳定边界法则及Ziegler-Nichol算法,以直线电机控制模型为例介绍如何在MATLAB 工具帮助下整定并验证PID 控制器参数,使参数的整定变得简单、易行,使整定效果更优化。 关键词:直线电机PID控制 MATLAB 控制系统参数整定系统仿真
Abstract: With the fast development of modern industry, more complicated control object, its performance control requirements improve continuously, cause people looking for better control method, which to improve PID control is the most typical example. The PID (Proportional-Integral-Derivative) control is one of the most common control methods at present. Its structure is simple and easy to implement, however, the control effect is perfect and it has a strong robust characteristics. The physical parameters is, meaning of ,theoretical analysis of system is integrity, and it is familiar by the engineering sector, which in the industrial process control has been widely used. Linear motor is one of the studied new motor. Because of its peculiarity, the linear motor performed better than rotary motor in the control systems when the moving route is linear. Its application range extends widely and widely. And it has been applied in many fields. However, the traditional parameter adaptability of proportion-integral-differential (PID) controller to the operating situation is very bad sometimes because the reduction and performance isn't good. Simple control and can't well adapt to changes in the system characteristics of the object of optimal control requirements. Therefore, in view of the control method is currently there are still widely used, to the study of the method of parameter setting will have a good application value. According to the stable boundary principle and Ziegler-Nichol algorithm, this paper introduces how to reduce and validate the PID controller parameter with the help of MATLAB tool taking the linear motor control model as an example. Making the parameters set becomes simple, easy to operate, and make the setting effect more optimization. Key words:Linear motor,PID control, Matlab, Control system, Parameters setting, System simulation