*)本文受国家自然科学基金(50608072)、863科技计划项目(2006AA04Z433)、重庆市教委项目(KJ070420)和重庆市科技攻关项目资助。蓝章礼 博士研究生,主要研究方向为计算机算法设计研究、数字图像处理、桥梁健康监测。
计算机科学2008V ol .35№.8
基于动态梯度的激光光斑中心定位算法*)
蓝章礼1,2 闫 果1 杨小帆2 周建廷3
(重庆交通大学计算机与信息学院 重庆400074)1 (重庆大学计算机学院 重庆400044)
2
(重庆交通大学土木工程学院 重庆400074)
3
摘 要 为提高激光光斑中心检测的长期稳定性、抗干扰性能和定位精度,在对相关圆心定位算法进行研究的基础上,通过理论分析与实验测试,提出一种基于动态梯度的激光光斑中心定位算法。该算法根据激光光斑特点,利用图
像梯度对光斑进行标识与定位。实验结果表明,该算法定位精度高,有效提高了激光光斑中心检测的抗干扰性能和长期稳定性,适合对测量精度要求高的长期在线测量。这种新方法已被成功用于自动激光挠度测量系统中。关键词 定位算法,激光光斑,中心,动态梯度
Location Algorithm of the Laser Spot Center Based on Dynamic Gradient
LA N Z hang -li 1,2 YA N G uo 1 Y AN G X iao -fan 2 ZH O U Jian -ting 3
(S chool of Compu ter and Inform ation Science ,Chongqing Jiaoton g University ,Ch ongqing 400074,China )
1(C ollege of Computer Science ,Chong qin g U niversity ,Ch on gqing 400044,China )
2(School of Civil Engineering and A rchitectu re ,Ch ong qin g Jiaotong University ,C hongqing 400074,C hina )
3
A bstract T o improve the lo ng -term stability ,anti -interfe rence pe rfor mance and location precision o f the la ser spot cen -te r de tectio n ,a dy namic g radient based locatio n algo rithm o f laser spo t center is given after theor etical analy sis and ex -periment based o n researching o f some locatio n alg o rithms o f the centre of a circle .Acco rding to the character o f the la -ser spo t ,the alg orithm identifies and lo cates the spo t by using g radient .Ex pe riment results demo nstr ate the hig h preci -sio n of the algo rithm ,and the lo ng -term stability and a nti -interference perfo rmance of the de tection o f the laser spo t cen -te r are improved efficiently .I t is suitable fo r lo ng -term online measurement .T he new algo rithm has been used in a lase r deflec tion measurement system successfully .
Keywords L ocafio n lgo rithm ,L ase r spo t ,Cente r ,Dy namic g radie nt
1 引言
激光光斑中心检测是激光挠度/位移测量法、激光扫描三角法、激光准直仪和激光光斑分析仪等光电测量手段中的关键技术[1-3]。光斑中心的定位精度、长期稳定性和抗干扰性能不仅直接影响测量结果,稳定性差的算法在长期使用的监测环境下甚至出现找不到激光光斑或测量结果错误的现象。为此,探索性能更好的光斑中心定位方法的研究始终在进行。其中,杨耀权、施仁、于希宁等提出用Houg h 变换提高激光光斑中心定位精度的算法[2],T ho mas 和Chan 提出基于圆拟合的激光光斑中心检测算法[4],Lyv ers ,M itchell ,A key 提出利用空间矩进行激光光斑的亚像素定位[5],也有研究者用对称与拟合的方法定位光斑中心,还有应用较多的重心算法等。这些研究都提高了检测激光光斑中心的精度。然而在实际的激光光斑中心定位中,由于激光存在散射、衍射、随机噪声和干扰光线,被测物面反射特性不均匀等因素,导致光斑信号强度分布不均匀,采用上述算法的精度或速度仍然不够,抗干扰性能较差。特别是当激光器长期工作在无人值守且有较强光线干扰的环境下时,随着激光强度的减弱,上述算法在一些情况下甚至完全无法正常使用。
在开发自动在线激光挠度/位移测量系统时,为得到一种精度高、速度快、抗干扰能力强且长期稳定性好的激光光斑中心定位算法,对相关的算法进行了研究、比较和改进,实验、运
用和改进了多种算法,找到了性能更优的基于动态梯度的激光光斑中心定位算法,该算法通过了长时间的实验验证并运用于实际工作中。本文针对激光光斑检测的实际工作环境特点,阐述基于动态梯度的激光光斑中心定位算法的思想,描述了算法的主要流程和梯度算子的设计,列举了几个典型实验进行算法的性能验证。
2 现有光斑中心定位算法分析
常用光班中心算法有Ho ug h 变换法、重心法、对称法、圆拟合法和空间矩定位法等,简单介绍如下。
Houg h 变换法[2,6]:按就近原则进行投票,根据得票多少检测激光光斑的中心。它需对参数空间离散化,限制了检测精度,参数空间得票最多的点可能不唯一,选择不同的点得到的图像空间曲线差异比较大。圆的Ho ug h 变换对每一个边界点都需要在三维参数空间内逐点投票并进行记录,时间复杂度为O (n 4),因此在实用中受到了限制,基本不可能用于高精度实时检测系统。
重心算法:将激光图像处理为灰度图像,然后求出激光光斑重心。它要求光斑图像分布比较均匀,图像对称性好,否则会产生较大误差,而且抗干扰能力弱,有光线干扰特别是存在一定强度且从侧面射入的干扰光线时,测量结果经常不可用。
圆拟合算法[4]:根据最小二乘原理用圆来逼近激光光斑轮廓。优点是算法速度快,时间复杂度为O (n ),能够多次迭
代,运算精度较高;但抗干扰性能差,当存在随机噪声时中心运算精度会明显降低,当干扰强度较大时所得圆心可能明显错误。
空间矩定位法[5]:使用LOG 算子把光斑边缘定位到单像素精度,然后使用二阶空间矩算子进一步细分,使边缘定位达到亚像素精度,再通过拟合计算得到光斑中心坐标。它要求光斑边缘为理想二级边缘,而实际上从背景到边缘存在过渡,不可能是两个简单的二级边缘,所以要得到更高的定位精度,需要通过建立误差查找表进行校正,或者使用三级模型来描述边缘等,这在实际光线复杂变化的情况下使用往往难以实现。
对称方法:利用激光光斑的对称性找对称中心,以对称中心作为激光光斑的中心。它要求光斑的对称性良好,否则误差较大。
3 基于动态梯度的光斑中心定位
在以激光光斑定位为基础的监测系统中,往往需要长期
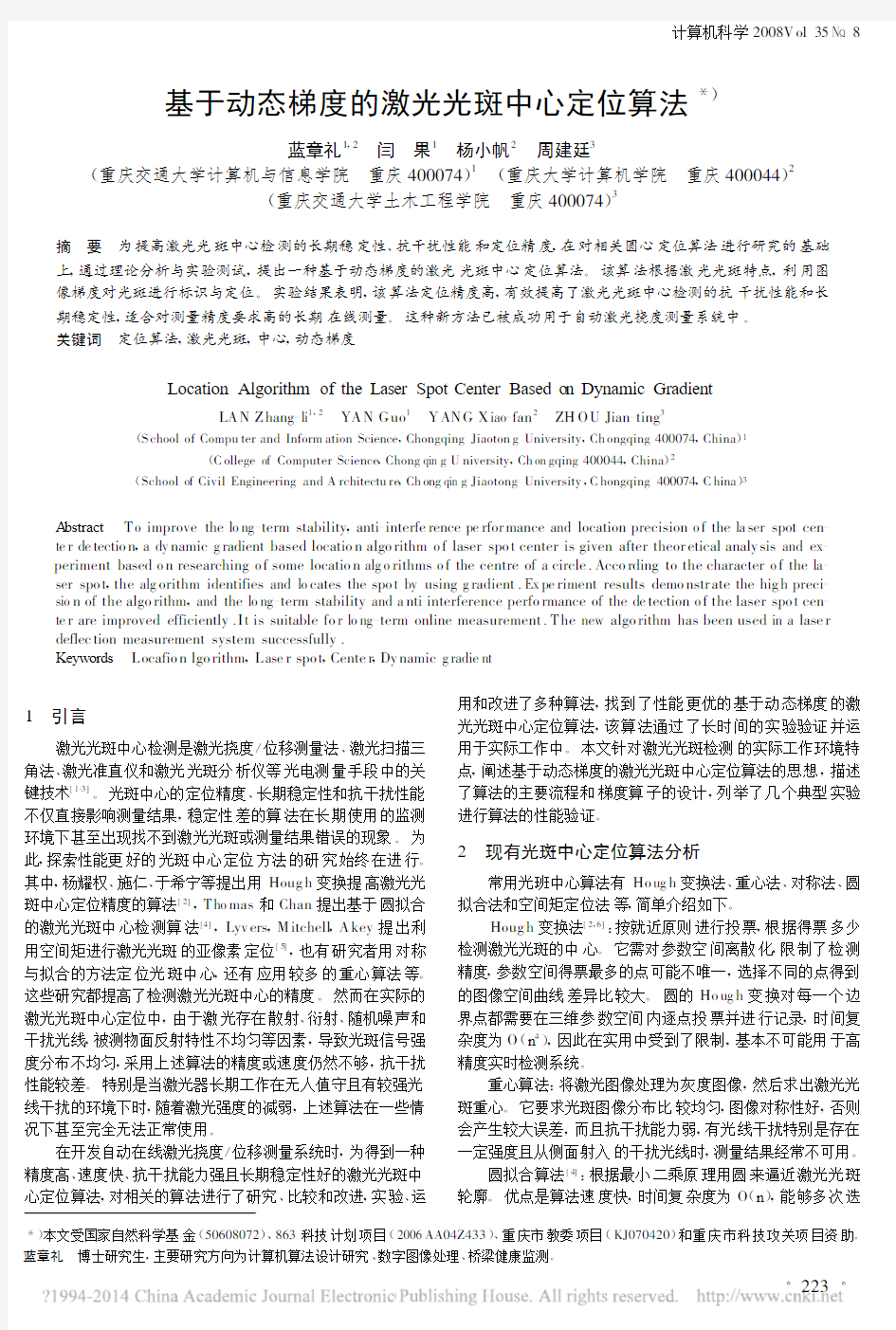
在线对激光光斑中心进行实时精确定位,并且要求在较强光线干扰时定位精度基本不降低。然而对于投射距离较远的激光,其光斑由于受到散射、衍射、随机噪声和干扰光线的影响,加之光斑投影面反射特性不均匀等因素,最终形成的光斑往往很不规则,亮度从中心到边缘逐渐减弱,散射光线、衍射条纹、随机噪声和干扰光线非常明显,如图1所示
。
图1 两种典型激光光斑图像
当激光器工作一段时间后,激光强度会减弱,光斑亮度会降低,在其它环境因素不变的情况下,光斑图像对比度降低,图像质量逐渐下降。直接采用以上几种算法不能同时满足在精确度、抗干扰和稳定性上的实际应用,为此需要研究一种能在实际使用中快速、精确、稳定、抗干扰的光斑中心定位方法。3.1 算法总体描述
本文提出的基于动态梯度的激光光斑中心定位算法的流程如图2所示
。
图2 算法的基本流程
其中在输入图像前往往还需要采用图像增强的方法提高输入图像的质量。扫描图像梯度是指按预定的梯度算子对图像的梯度分布情况进行度量和评估,然后根据度量的结果确定光斑图像中梯度的具体分布及最大梯度的数值。而标识梯度则是根据梯度的具体分布确定哪些梯度应该保留并进行标识,通过标识将原始图像转化为以梯度为基准的二值图像,然后对标识出的二值梯度图像进行形态学滤波,去除干扰,最后根据光斑的二值梯度图像进行圆心的拟合运算。
以650nm 红色激光为例,将各环节阐述如下。3.2 梯度算子设计
对于图像函数f (x ,y ),它在点(x ,y )处的梯度是一个矢量,定义为
G [f (x ,y )]=
f
x
f y
(1)
梯度的方向在函数f (x ,y )最大变化率的方向上,梯度的幅度G [f (x ,y )]由下式算出:
G [f (x ,y )]= f x 2+ f y
21/2
(2)
对于数字图像而言,其梯度使用差分的方法进行运算,这就涉及到运算梯度的各种算子,如常用的水平垂直算子、Ro be rt 梯度算子、Sobel 算子、P rewitt 算子和二阶微分的Laplacian 算子等。
在本文的研究中,梯度运算是用于标识激光光斑的正确位置,不同于图像锐化,因此梯度算子的设计至关重要,且不同于锐化时的算子。设图像上各像素位置如下所示:
f (x ,y )
f (x +1,y )
○ ○○ ○
f (x ,y +1)f (x +1,y +1)考虑激光光斑基本呈圆形,沿f (x ,y )与f (x +1,y +1)及f (x +1,y )与f (x ,y +1)方向图像梯度最大,而干扰光线规律性不强。经分析与多次实际测试比较后,得到以下梯度算子:
G [f (x ,y )]=
2f (x ,y )-f (x +1,y +1)+2f (x +1,y )-f (x ,y +1)
(3)
式(3)是一个经验公式,2是一个经验值,可根据具体环境适当调整。利用式(3)作为梯度算子对图像的梯度进行标识时,光斑中心附近的梯度标识形状与原图像稳合,干扰噪声点少,抗干扰能力强,激光光斑位置准确。
3.3 梯度的扫描、确认与标识
对图像梯度的扫描、确认与标识分以下几步:(1)扫描整个图像,以每个像素的R 值进行梯度运算,找到图像中的最大R 值梯度数值。(2)设定标识阈值。可以用最大梯度值的1/2,1/3等作为阈值。实验表明,利用式(3)作为梯度算子时,标识阈值在1/1.5~1/5之间均能取得良好效果。
(3)再次扫描图像,对于R 梯度值大于标识阈值的,将其置为“1”,标识为白点,否则置为“
0”,标识为黑点,输出图像转化为与原图像对应的二值图像。
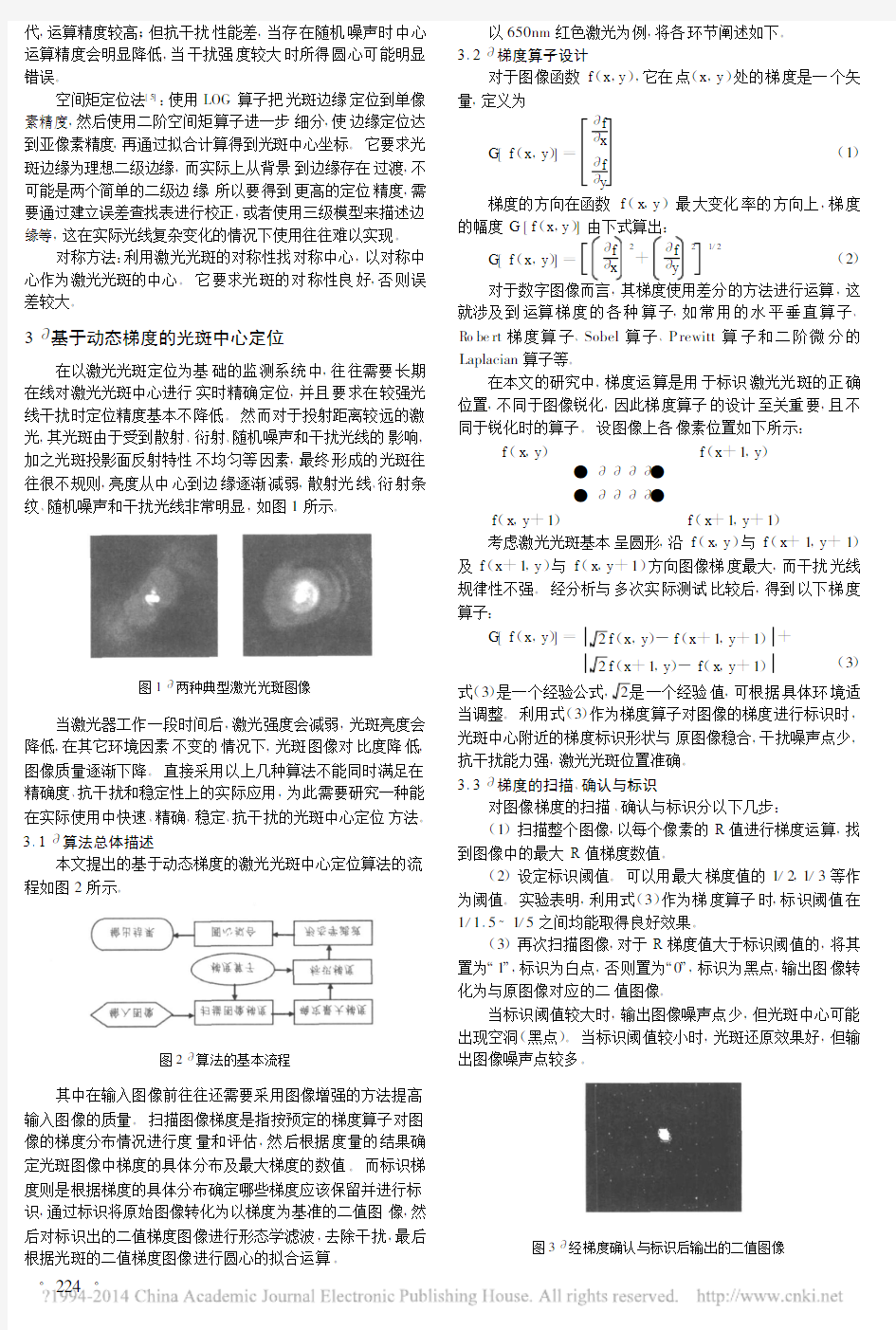
当标识阈值较大时,输出图像噪声点少,但光斑中心可能出现空洞(黑点)。当标识阈值较小时,光斑还原效果好,但输出图像噪声点较多。
图3 经梯度确认与标识后输出的二值图像
根据梯度算子的设计和上述标识算法,在实验室中利用CCD 摄像机和视频采集卡对真实激光光斑进行采集并利用本文算法获得了输出图像。图3是将标识阈值设为1/2.7,经梯度确认与标识的二值梯度图像。
3.4 形态学滤波
在如图3所示的输出图片中,除了能够标识出光斑的位置外,还存在着部分盐性噪声和少量胡椒噪声。当标识阈值较大时,光斑中心出现的胡椒噪声会更明显。为消除椒盐噪声的干扰,应采取适当的滤波方式进行图像的增强,从而提高中心定位的精度。
采用O pening 算法消除外部盐性噪声点(包括一次Ero -sio n 操作和一次Dilatio n 操作),然后再进行一次Closing 操作去除光斑中的暗点(包括一次Dilatio n 操作和一次Erosio n 操作)。在具体的操作中,选用3×3的白色方块结构元S (Structuring element S )作为遮罩(M ask ),而图像本身作为一个二值图像B (Binary image B )进行一次Opening 运算和一次Closing 运算。即。
B ★S =(((B ΘS ) S ) S )ΘS
(4)
按(4)式进行处理后,光斑外的噪声点、光斑中的小暗点和边缘不平滑处被消除。结果如图4所示
。
图4 完成Opening +Closing 运算后的图像
3.5 圆心拟合
在经过图像预处理、采用恰当的梯度算子进行梯度的扫描、确认、标识、图像转换和滤波后,采集时的抗干扰能力明显增强,信号光斑形状比较规则,对称性较好,光斑边缘比较光滑而清晰,有利于光斑中心的准确运算和稳定。
本文采用以下公式进行圆心的拟合运算[4]:a =
(x 2 x + xy 2-x 3-x y 2)( y 2-y 2)-(x 2 y + y y 2-y 3-x 2y )(xy -xy )
2( x 2-x 2)( y 2-y 2)-2(xy -x y )2pi xel
(5)
b =
(x y + y y -y -x y )( x 2-x )-(x x + x y -x -x y )( x y -xy )
2( x 2-x 2)( y 2-
y 2)-2(xy -x y )
2pi xel (6)对于形状对称性较好的光斑,从理论上分析可知用迭代的方法拟合圆心时第一次即能较好地找准圆心位置。在实验中我们也发现,对经过上述步骤处理的激光光斑中心进行运算时,第一次的运算结果与第二次迭代结果非常接近,两次结果相差不超过0.2像素,第二次以后的多次迭代结果几乎完全重合。因此,没有必要进行3次以上的迭代,从而缩短运算时间。而对于没有改进的圆心拟合算法,一般情况下至少要进行3次以上的迭代运算才能使结果比较稳定。
4 实验及分析
为验证改进的效果,分别对抗干扰性能、激光强度变化和
中心运算精度进行实验。实验时按图5连接设备。
图5 实验系统连接示意图
其中光线过滤材料为蓝绿色半透明材料,其作用在于减弱通过的自然白光强度且使其呈蓝绿色,而650nm 的红色激
光由于穿透性很强,所以透过过滤材料后仍然呈鲜红色。在进行梯度运算时,仅提取每个像素的R 值进行梯度运算,由于自然白光通过过滤材料后已呈蓝绿色,其红色成分少,R 值小,R 值的变化不大。由于以R 值作为梯度运算的基础,因此干扰光线基本被滤除。
4.1 抗干扰实验
将一个激光发射器和成像靶固定,确保激光光斑不发生改变。实验过程中不定时的将室内灯光打开和关闭,偶尔用二极管手电筒和强光手电筒直射激光光斑或将强度较大的太阳光通过反射装置直接投射到成像靶。结果表明,在使用前文所述的常用方法时,测量数据极不稳定,特别是用手电筒和太阳光直接照射时,中心定位完全不正确。
而在采用基于动态梯度的激光光斑中心定位方法进行的
实验中,当用各种光线进行干扰时,由于干扰光线在成像靶上形成的光线图像整体明暗比较一致,不管干扰光线的强度如何,其图像梯度完全无法与激光光斑图像的梯度比较,因此经梯度运算后几乎完全被滤除,运算的光斑中心位置结果基本不变,测量数据保持稳定。4.2 激光强度变化实验
对于长期在线工作的激光器,其激光强度将随着时间的推移而逐渐降低,采用传统的方法在激光强度逐渐减弱后确认光斑的位置的难度增加,甚至找不到光斑。本文所设计的算法通过检测最大梯度来标识光斑位置和范围,在很大程度上不会受光斑强弱的干扰。
实验时逐次降低激光器的供电电压,从而减弱激光光斑的亮度,模拟长期工作后激光强度的变化。实验结果表明,该算法对光线强度不敏感,特别是当激光光线很弱时,其它算法在不进行阈值调整时均难以正确判断激光光斑的位置,而本算法在成像靶上投射的光斑通过CCD 摄像机形成的图像在人眼几乎不可见时仍能正确标识光斑的位置且运算的光斑中心保持稳定。
实验中我们也试图通过找最大亮度的方法确认激光光斑的位置,从而可以直接利用其它算法进行定位,但在使用最大亮度的方法进行运算时的抗干扰性能差,特别是激光光斑本身的亮度不够时,稍有干扰就不能得到正确结果。
4.3 中心运算精度实验
中心运算精度是各种光斑中心算法性能的关键评价因素,为此,我们分别对对称性较好、对称性较差的真实激光光斑和模拟激光光斑进行了实验,实验用的图像为摄取或制作
的静态图像。由于激光光斑边缘非常模糊且对称性不好,用空间矩算法很困难,Houg h 变换法的运算复杂度高且性能较差,因此只采用重心法、圆拟合算法与本文算法进行了比较。在实验过程中,圆拟合算法迭代次数为3,本文算法迭代次数为2。4.3.1 对称性较好的激光光斑中心运算
图6为一真实的对称性较好的激光光斑图像,由于不知道其真实中心所在位置,只能进行估计,大约为(156,118)。各算法的运算结果为:重心算法,(151.53,118.70);圆拟合算法,(150.65,118.39);本文算法,(156.13,118.30)。由于图像对称性较好,因此重心法与圆拟合法结果比较接近。各运算结果在激光光斑图像中的位置如图6所示
。
图6 对称性好的激光光斑中心定位结果
4.3.2
对称性较差的激光光斑中心运算
图7 对称性差的激光光斑中心定位结果
图7为一真实的对称性较差的激光光斑图像,其真实中心所在位置估计约为(137,109)。各算法的运算结果为:重心算法,(154.46,122.95);圆拟合算法,(138.32,113.26);本文算法,(137.25,109.68)。由于激光光斑的图像对称性差,重心算法明显不正确,肉眼已可确定其远离了真实中心。各运算结果在激光光斑图像中的位置如图7所示。4.3.3 模拟光斑中心运算
由于真实的激光光斑图像的实际中心无法无误差的获取,为此我们制作了一个中心坐标为(152.5,121)的理想圆形图像,并模拟激光光斑特点在该圆的图像上加入了一些干扰噪声、散射及衍射条纹,如图8所示
。
图8 模拟激光光斑
运算结果为:重心算法,(141.65,130.54);圆拟合算法,
(147.68,121.88);本文算法,(152.59,120.86)。根据图像特点可分析运算结果的合理性,由于该图像对称性较差,因此重心法运算误差较大;选择合适的阈值后,圆拟合法与本文算法结果误差都比较小。
结束语 本文通过对激光光斑特点及其工作模式进行分析,提出了基于动态梯度的激光光斑中心定位算法。该算法
提高了激光光斑中心算法的抗干扰性能和长期稳定性,测量精度较高,减少了迭代次数少,其优越性在实验中已得到充分体现。目前,该方法已成功应用于激光挠度/位移监测系统并投入到渝黔高速公路太平庄大桥和安稳大桥的在线应用,已稳定运行超过5000h ,为桥梁健康监测系统提供了大量真实有效的数据。
参考文献
[1]张奔牛,蓝章礼,周志祥.位移/挠度检测和监测装置及方法[P ].中国.发明专利申请公开说明书.200510057473.6[2]杨耀权,施仁,于希宁,等.用H ou gh 变换提高激光光斑中心定位精度的算法[J ].光学学报,1999,19(12):1655-1660
[3]Pau l J ,Frederick W ,David L .Nova laser alignm ent control sy s -tem [A ].SPIE [C ],1984,483:54-64
[4]
Thomas S M ,Chan Y T .A sim ple approach for the estim ation of circular arc cen tre and its radiu s [J ].C om puter Vision ,Grap h -ics ,an d Image Processing ,45(3):362-370[5]
Lyvers E P ,M itchell O R ,Ak ey M L ,et al .Subpix el m easure -ments u sing a moment -based edge operator [J ].IEEE T ran sac -tions on Pattern Analysis and M achine Intel1igen ce ,1989,11(12):1293-1309[6]
Casltem an K R .Digital im age processing [M ].Beijing :T shua University Pu blishing C om pany ,1998
(上接第219页)
续光滑。
结束语 本文通过分析手指静脉图像的结构及特点,提出了基于降维思想的手指静脉特征提取方法,即把二维的图像分解成一维的曲线进行处理,从而达到简化算法以及特征提取的目的。实验表明:该方法思想独特,算法简单易行,适用于那些信噪比较低、光照不均以及具有手指静脉类似特征的图像的特征提取。该算法对手指静脉的提取达到满意的效果。
参考文献
[1]
孙东梅,裘正定.生物特证识别技术综述[J ].电子学报,2001,
29(12A ):1744-1746[2]包桂秋,林喜荣,苏晓生.基于人体生物特征的身份鉴别技术发展概况[J ].清华大学学报(自然科学版)2001,41(4):72-76[3]Zanan H D ,Lovh oiden G ,Desh mukh H .Design of a clinical vein contras t en han cing profector [J ].SPIE ,2001,4254:204-215[4]Lovhoiden G ,Deshmu kh H ,Zanan H D .Clinical evaluation of vein contras t en han cem ent [J ].SPIE ,2002,4615:61-70[5]冈萨雷斯.数字图像处理[M ].北京:电子工业出版社,2005[6]马殿炜.基于距离变换的嵌入式马尔科夫模型在手指静脉识别中的应用[D ].博士论文.吉林大学,2005
[7]
葛哲学,陈仲生.M atlab 时频分析技术及其应用[M ].北京:人民邮电出版社,2006
激光治疗的操作规范及管理 激光治疗具有相当的风险性,因而有必要在各方面严格遵循质控要求和有关的规章制度。唯有如此,才能充分保障患者的健康及安全,最大限度地减少并避免医疗事故。 【对操作人员的要求】 (1激光从业医技人员必须具备执业资格。 (2从事皮肤激光治疗的医师,应有一定的皮肤科临床经验。 (3从事皮肤激光治疗的医师均应经过正规培训,掌握激光的基本知识、激光的技术参数和操作方法。 (4从业人员应定期接受培训和再教育。 【操作规程】 (1与患者及家属进行术前谈话,告知激光手术可能的风险及术后注意事项,使患者的期望值达到合理水平,患者术前均应签署知情同意书。 (2按常规进行术前准备,根据需要清洁手术区、常规消毒,必要时还应予以局部麻醉和表面麻醉。麻醉剂的使用应遵循安全、规范的原则。 (3根据对患者的诊断,选择合适的激光器和激光参数进行治疗。治疗时,对周围正常皮肤要给予妥善防护,工作人员应佩戴防护目镜以保护眼部。 (4治疗完毕后,根据需要在创面上外用保护剂,以预防感染。 (5术后应避免感染,可外用和(或)口服抗生素,治疗区应避免 搔抓,避免剧烈运动。美容激光或光子嫩肤术后应避免日晒。 (6患者术后如有意外情况,应尽早与医师联系并复诊。【激光器的分级】
激光器按其对人体的危害,可分为4级,这主要是参照美国辐射卫生局制定的标准。 I级激光器:在通常操作的情况下,这一级激光器对人体无辐射危害,因而可以免除控制措施,也不必使用警示标志。 Ⅱ级激光器:又称为低功率激光器。在使用时,只要仔细操作即可,一般不需要特别的安全防护措施,但是在机器的外罩上要使用警示标志。 Ⅲ级激光器:又称为中功率激光器,其中Ⅲ-A 类型对人体有低度危险性,Ⅲ-B 类型对人体有中度危险性。由于本级激光器对人体可造成直接的危害,因此必须采取防护措施,严禁直视激光束,同时尽可能减少激光反射。机器的外罩上应使用警示标志。 Ⅳ级激光器:此类激光器输出功率高,对人体具有高度危险性。因此必须采取严格的防护措施,并使用警示标志。同对激光器最好安放于单独的房间内,实行远距离操作。 【激光室的管理】 (1激光治疗室应定期清洁或消毒,手术器械也要定期消毒。 (2激光治疗室要有充分的照明、通风条件,尽量减少能形成漫反射的物质。 (3二氧化碳激光、铒激光等治疗时易产生烟尘,安放这些设备的 手术室要安装吸烟尘装置。 (4病史资料及各种物品应由专人负责管理。 【皮肤激光治疗的防护】 (1Ⅱ~Ⅳ级激光器应贴有警示标志。
无线传感网络定位算法 目录 一、常用定位技术 (2) 1.1 GPS与A-GPS定位 (2) 1.2 基站定位(cell ID定位) (3) 1.3 Wifi AP定位 (3) 1.4 FRID、二维码定位 (3) 二、定位算法研究的目的和意义 (4) 三、WSN定位算法分析 (5) 3.1 基于锚节点的定位算法 (5) 3.1.1 距离相关定位算法 (5) 3.1.2 距离无关定位算法 (6) 3.2 基于移动锚节点的定位算法 (8) 3.2.1 基于移动锚节点的距离相关定位算法 (9) 3.2.2 基于移动锚节点的距离无关定位算法 (11) 四、总结 (13) 附:组员及分工情况..................................................................................... 错误!未定义书签。
一、常用定位技术 1.1 GPS与A-GPS定位 常见的GPS定位的原理可以简单这样理解:由24颗工作卫星组成,使得在全球任何地方、任何时间都可观测到4颗以上的卫星,测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。在整个天空范围内寻找卫星是很低效的,因此通过GPS 进行定位时,第一次启动可能需要数分钟的时间。这也是为啥我们在使用地图的时候经常会出现先出现一个大的圈,之后才会精确到某一个点的原因。不过,如果我们在进行定位之前能够事先知道我们的粗略位置,查找卫星的速度就可以大大缩短。 GPS系统使用的伪码一共有两种,分别是民用的C/A码和军用的P(Y)码。民用精度约为10米,军用精度约为1米。GPS的优点在于无辐射,但是穿透力很弱,无法穿透钢筋水泥。通常要在室外看得到天的状态下才行。信号被遮挡或者削减时,GPS定位会出现漂移,在室内或者较为封闭的空间无法使用。 正是由于GPS的这种缺点,所以经常需要辅助定位系统帮助完成定位,就是我们说的A-GPS。 例如iPhone 就使用了A-GPS,即基站或WiFi AP 初步定位后,根据机器内存储的GPS 卫星表来快速寻星,然后进行GPS 定位。例如在民用的车载导航设备领域,目前比较成熟的是GPS + 加速度传感器补正算法定位。在日本的车载导航市场是由Sony 的便携式车载导航系统Nav-U1 首先引入量产。例如在增加了三轴陀螺仪的iphone4里可以利用三轴陀螺仪来辅助完成定位,具体可以参见这篇文章的介绍,不过三轴陀螺仪定位的误差会随着时间逐渐积累。
地下管线探测仪定位与定深方法 地下管线探测仪是自来水公司、煤气公司、铁道通信、工矿、基建单位改造、维修、普查地下管线的必备仪器之一,它能在不破坏地面覆土的情况下,快速准确地探测出地下自来水管道、金属管道、电缆等的位置、走向、深度及钢制管道防腐层破损点的位置和大小。 地下管线大多数都是金属材料,可以感应传递电磁波,基于这一原理,英国雷迪公司设计开发了一款能够通过检测管线上所发射的电磁波智能检测管线位置的仪器——新型RD8100智能管线探测仪。该地下管线探测仪以其优越的性能,灵活方便的检测方法,在电力、电信、供水、热力、燃气、石油、化工、城市公用事业等领域拥有广大的用户群体。 地下管线仪定位方法:先了解探测仪器的工作原理,管线仪工作原理就是遵循电磁定律,这里以RD8100为例,接收机电路板包括一个垂直线圈、两个水平线圈。 谷值法:谷值法又称极小值法,是利用管线仪垂直线圈测量电磁场的磁通量,当管线仪移动到管线正上方时,电磁场的垂直分量为0,根据极小值点位来确定管线的平面位置。 该方法的特点是:原理简单,仪器显示直观,定位灵敏度高,缺点是易受附近信号影响,当测量的管线附近有其他同等或较强信号时,管线探测仪线圈接收其他的磁通量从而影响管线定位的准确性。谷值法只适用于简单条件下,无邻近干扰或距离干扰物的信号极弱时,快速追踪管线走向。 峰值法:峰值法与谷值法相反,是利用管线仪水平线圈测量电磁场的磁通量,峰值法分为宽峰值法和窄峰值法两种。宽峰值法是利用下水平线圈检测,当管线仪移动到管线的正上方时,电磁场的水平分量为最大,以此来确定管线的平面位置。
该方法的特点是:不如估值法更直观,管线正上方磁通量变化小,因而灵敏度较低。窄峰值法与宽峰值法类似,只不过不同的是利用上水平线圈和下水平线圈同时检测。 地下管线定深方法: 1、直读法 管线仪利用上下两个水平线圈测量电磁场的梯度,而电磁场梯度与埋深有光,按下接收机测深按钮,在数字式表头直接读出地下管线的埋深。这种方法简单,在简单条件下有较高的准确度。但是在管线密集等复杂条件下,直读测深的数据只能作为参考数据。 2、70%窄峰值法 当目标管线的水平走向大致确定后,调节管线仪的增益键,将信号强度调节到合适值(距离信号满值为佳)并记住该值,分别向管线两侧移动接收机,当屏幕值显示为70%时,在地面做好标记,两个点的距离即为管线中心到地面深度的准确值,此方法适用于复杂条件下的测深工作。 3、辅助测深法 极小值法准确判断管线位置,将接收机与地面呈45度夹角进行垂直管线方向平移,当接收机上显示的磁场信号减到目标管道上方数据的一半时,接收机底部中心所处的位置至目标管道在地面上的定位点间距等于管道中心至地面的距离。现场作业时45度角很难把握,因此,很少在实际的工作中采用管线仪45度法。
激光器介绍 WALC4020数控激光切割机 更快、更宽、更厚的钣金切割专家 1、产品简介 更高性能的激光切割系统: WALC4020选择了世界最先进的激光器、切割头。拥有最高质量的部件和最好的结构。如西门子的控制系统和直线驱动系统,STAR的直线导轨。 更先进的结构型式: A.横梁 WALC4020激光切割机采用横梁倒挂结构,此结构有如下优势: 1.与横梁悬臂式相比,横梁的运行速度更高,运行更平稳,可达200米/分。这是因为驱动力的作用点位于横梁的重心,不会产生附加力矩,驱动效率更高,运行更平稳。 2.与小龙门移动式相比,电气控制更简单,系统更可靠。操作更方便。 因此,WALC4020更适用于高速,高功率切割。 B.交换工作台: 采用垂直升降式交换工作台,此型式的交换方式与目前使用的斜升式相比有如下优点: A.提升能力更大,安装更方便。 B.与横梁倒挂结构配合,结构更合理。 C.在切割区内,工作台下的空间更大,以便布置排渣装置及抽风除尘装置。 C.驱动: WALC4020激光切割机的X、Y轴采用了西门子的控制系统和直线驱动系统,与传统电机+滚珠丝杠(齿条)相比,驱动力更大,加速度更高。加速度可达3G,速度最高可达200米/分。而且运行更平稳。 X,Y,Z轴的导轨采用STAR高品质直线导轨,精度更高,运行更平稳。 2、产品特性 WALC4020融合了激光最新技术的应用 一.控制 WALC4020的控制器是SIEMENS 840D。该控制器的界面已经进行了改进,以适合激光切割系统的应用。 二.穿透检测 在打孔时,穿透检测使用传感器来确定光束是不是已经穿透了板材,这样可以得到最高质量的穿透效果,节省时间。
2013年4月 Journal on Communications April 2013 第34卷第4期 通 信 学 报 V ol.34 No. 4 射频识别动态定位方法 李程,钱松荣 (复旦大学 信息科学与工程学院,上海 200433) 摘 要:提出一种新型的通过参考标签和移动RFID 射频读写器进行定位的方法。该定位方法的主要优点是不需要记录任何测量信息如TOA 、RSSI 等,而是通过移动读写器,不断对目标标签和参考标签进行读取,经椭圆还原算法对读区域进行还原,最终以交集计算实现定位。该方法思路简单,但实现了较高精度的RFID 室内定位。实验结果表明,该定位方法的精度可在最小的参考标签单元格内(可到达数十厘米级),同时建立的原型定位系统具有成本低、易于部署等特点,存在应用于大规模RFID 仓储定位管理的可行性。 关键词:射频识别;室内定位;移动读写器;参考标签 中图分类号:TN925.93 文献标识码:B 文章编号:1000-436X(2013)04-0144-05 RFID dynamic positioning method LI Cheng, QIAN Song-rong (School of Information Science and Engineering, Fudan University, Shanghai 200433, China) Abstract: A novel proximity method-RFID dynamic positioning method was presented, using a moving radio frequency identification (RFID) reader to accurately position the target based on reference tag arrays. The major advantage of the method was that through reading tags without any measurement data, e.g., the time of arrival (TOA) or the received sig-nal strength indication (RSSI), it improved the accuracy of positioning target based on reference tags and a moving reader. The algorithm was simple but useful. Based on the performance of the prototype system, it demonstrated that the pro-posed system could accurately position in one of the smallest reference tag cell (within dozens of centimeters) and could be deployed easily with low cost, thus has potential application in RFID warehouse management. Key words: RFID; indoor positioning; moving reader; reference tags 1 引言 近年,随着RFID (radio frequency identification)应用的广泛开展,如何高效率、高精确度、低成本地定位RFID 标签,成为了RFID 大规模部署的重要问题。以仓储管理为例,货品在RFID 的管理系统中贴有RFID 标签,用以唯一识别。如果在仓库中能够快速定位目标标签的位置,从而找到货品,将会非常有效地改进整个仓储管理过程,大大节省时间和人力成本。由此,出现了一系列运用RFID 进行室内标签定位的研究和应用[1]按照具体的定位方法,可以大致将RFID 室内定位分为3类:距离估计、场景分析和近似估计。距离估计。 [2]主要是运用RSS (received signal strength)、 TOA (time of arriving)、RSP (received signal phase) 等参数,根据特定的物理模型或者几何模型对于距离进行估算;场景分析[3],一般是预先建立基于RSS 参数值的先验分布图,然后根据概率模型、k-NN (k -nearest neighbor )模型等做出相应的分析,实现定位;这两大类方法要求RFID 读写设备上有度量特定物理参数的模块,通过收集参数,进行运算实现定位。但是大多RFID 设备出于成本考虑并没有应用这些测量模块,或者模块的测量精度并不能满足定位的需要。同时,该方法需要收集的度量信息易受到环境的干扰,容错率低。近似估计[4]收稿日期:2012-05-16;修回日期:2012-11-07 利用是否读到标签这一个简单的条件,通过设计相应的天线、布局读写器等,得到一个目标标签大致所在区域,从而进行位置估算。它的优点是仅用最基本的读标签 doi:10.3969/j.issn.1000-436x.2013.04.017
医学中常用的激光器 自第一台激光器问世后,人们对激光器件及技术进行了大量的研制工作,取得了相当可观的成果。目前能实现激光运转的工作物质达数百种以上,大体上分为气体、固体、半导体、染料等几大类。人们在探索激光产生机理的同时,扩展了激光的频谱范围,几千条谱线遍布于真空紫外到远红外的广阔光谱区域。激光方向性好、强度大,可以使被照物体在1/1000s内产生几千度的高温,瞬间发生汽化。由于激光的物理特性决定了其具有明显的生物学效应,。各种不同的激光具有不同的特性和组织效应,正确认识激光的这些特点,是选择和合理利用激光的基础。 一.气体激光器 气体激光器,按工作物质的性质,大致可分成下列三种:(1)原子激光器:利用原子跃迁产生激光振荡,以氦氖激光器为代表。氩、氪、氙等惰性气体,铜、镉、汞等金属蒸气,氯、溴、碘等卤素,它们的原子均能产生激光。原子激光器的输出谱线在可见和红外波段,典型输出功率为10毫瓦数量级。 (2)分子激光器:利用分子振动或转动状态的变化产生辐射制成的,输出的激光是分子的振转光谱。分子激光器以二氧化碳(CO2)激光器为代表,其他还有氢分子(H2),氮分子(N2)和一氧化碳(CO)分子等激光器。分子激光器的输出光谱大多在近红外和远红外波段,输出功率从数十瓦到数万瓦。(3)离子激光器:这类激光器的激活介质是离子,由被激发的离子产生激光放大作用,如氩离子(激活介质为Ar+)激光器。氦镉激光器(激活介质为Cd+)等。离子激光器的输出光谱大多在可见光和紫外波段,输出功率从几毫瓦到几十瓦。 气体激光器是覆盖波谱范围最广的一类器件,能产生连续输出。其方向性、单色性也比其他类型器件好,加之制造方便、成本低、可靠性高,因此成为目前应用最广的一类器体。 1、氦氖激光器 氦氖激光器能输出波长为632.8nm的可见光,具有连续输出的特性。它的光束质量很好(发散角小,单色性好,单色亮度大)。激光器结构简单,成本低,但输出功率较小。氦氖激光器在工业、科研、国防上应用很广,医疗上主要用于照射,有刺激、消炎、镇痛、扩张血管和针灸等作用,广泛用于内科、皮肤科、口腔科及细胞的显微研究。 氦氖激光器有三种结构形式:内腔式、外腔式和半内腔式。它们均由放电管、谐振腔、激励电源等三部分组成。以内腔式为例,放电毛细管是产生气体放电和激光的区域,它的内径很小,约在1到几毫米。电极A为阳极,由钨杆或钼(或镍)筒制成。阴极K为金属圆筒,由铝、钼、钽等制成,它们均有足够的电子发射能力和抗溅射能力。组成谐振腔的两块反射镜紧贴于放电管两端,并镀以多层介质膜。其中一个为全反射镜,另一个则为部分反射镜,整个谐振腔在出厂前已调整完毕,因此使用简单、方便。放电管的管径比放电毛细管粗几十倍,用以保持氦氖气压比及加固谐振腔。为了避免放电管变形而引起激光输出下降,内腔管的长度不宜过大,一般不超过一米。外腔式激光器可以更换不同的反射镜,使输出功率最大,光束发散角最小。也可在反射镜和放电管之间插入光学元件,以研究激光器的输出特性,调制它的频率或幅度,并可制成单频大功率激光器。 2、二氧化碳激光器 二氧化碳激光器的能量转换效率达20~25%(氦氖激光器的能量转换效率仅为千分之几)。它的输出波长为10.6微米,属于远红外区,连续输出功率可达万瓦级,常用电激励,结构比较简单紧凑,使用方便,是目前最常用的激光器之一,在医学上,CO2激光器作为手术刀使用日益引起人们的重视。CO2激光器也用于皮肤科、外科、神经外科、整形外科、妇科和五官科的手术,在癌症的治疗上也有一定成效。 最常见的封离型内腔式二氧化碳激光器的管壳是由硬质玻璃或石英材料制成的。常见为三层玻璃套管结构,其最内层是放电管,中间层是水冷套,外层是储气管。在内外层之间有气体循环通路,这是为了保证混合气体的均匀分布而设计的。其光学谐振腔通常用平凹球面腔。球面镜可用石英或其他光学玻璃做基片,然后,在表面上镀层金属膜。平面镜是输出窗片,要求它对10.6μm的激光有很好的透过率,且表面不易损伤,机械性能好等。一般中小功率的激光器常常采用锗单晶做输出片,大功率的用砷化镓
60个常用穴位定位、主治、操作 1.尺泽合穴 定位:在肘横纹中,肱二头肌腱桡侧凹陷处。 主治:咳嗽,气喘,咳血,小儿惊风,急性吐泻,肘臂挛痛。 操作:直刺0.8~1.2寸,或点刺出血。 2.列缺络穴;八脉交会穴(通于任脉) 定位:桡骨茎突上方,腕横纹上1.5寸,当肱桡肌与拇长展肌腱之间。(简便取穴双手虎口交叉,食指指尖所指处) 主治:头痛,项强,咳嗽,气喘,咽喉肿痛,口眼歪斜,牙痛。操作:向上斜刺正0.5~0.8寸。 3.少商井穴 定位:拇指桡侧指甲根角旁约0.1寸。主治:咽喉肿痛,高热,昏迷,癫狂,鼻衄。操作:浅刺0.1寸,或点刺出血。 4.商阳井穴 定位:示指末节桡侧,指甲根角旁0.1寸。 主治:齿痛,咽喉肿痛及五官疾患,热病、昏迷。 操作:浅刺0.1寸,或点刺出血。 5.合谷原穴 定位:在手背,第1、2掌骨间,当第2掌骨桡侧的中点处。(半握拳取穴)主治:头痛,齿痛,目赤肿痛,口眼歪斜,耳聋,经闭,滞产,无,发热恶寒,无汗,多汗。 操作:直刺0.5~1寸。 6.手三里 定位:在阳溪穴与曲池穴连线上,肘横纹下2寸处。 主治:肘臂无力,上肢不遂,腹痛,腹泻,腹胀,齿痛,颊肿。操作:直刺 0.8~1.2寸。 7.曲池合穴 定位:屈肘成直角,在肘横纹外侧端与肱骨外上髁连线中点。 主治:手臂痹痛,半身不遂,瘾疹,热病,癫狂,腹痛,吐泻,高血压,咽喉肿痛,齿痛。操作:直刺0.5~1寸。 8.肩髃 定位:肩峰端下缘,当肩峰与肱骨大结节之间,三角肌上部中央。臂外展或平举时,肩部出现两个凹陷,当肩峰前下方凹陷处。主治:肩臂挛痛,上肢不遂,瘰疬。操作:直刺或向下斜刺0.8~1.5寸。 9.迎香 定位:在鼻翼外缘中点旁开约0.5寸,当鼻唇沟中。(微笑当鼻辰沟中正中央,略向上刺)主治:鼻塞,口歪,鼻衄,胆道蛔虫。操作:略向内上方刺或平刺0.3~0.5寸。 10.四白 定位:目正视,瞳孔直下,当眶下孔凹陷处。主治:目赤痛痒,目翳,眼睑润动,头痛,眩晕,口眼歪斜,面肌痉挛。操作:直刺0.3~0.5寸。 11.地仓 定位:口角旁约0.4寸,上直对瞳孔 主治:口眼歪斜,齿痛,流涎,三叉神经痛。 操作:斜刺或平刺0.5~0.8寸。
非金属管线探测的四种方法 移动信标探测法 利用信标探测仪定位管道,其基本的工作原理是通过追踪“信标”在管道中的移动从而定位管道的路径。信标可以做为一个小发射机来使用,使用时利用玻璃钢穿孔器和连接绳;或者利用刚性和半刚性电缆推进装置;或者利用CCTV管道爬行器将信标置入管道内部,利用信标探测器接收机在路面上接收信标发射的磁场信号,从而对管道定位和定深。从使用方法上来看,信标法探测的前题是只能应用于开放式的管道,即:非压力管道、重力管道、带有检修井或是窨井等设施。从这一层面来说只适用于:排水管道。信标法在探测范围上有很大的局限。 固定信标探测法 EBEX?300信标探测器通过发送可使地下信标感应的特定低频脉冲信号,定位预埋于地下管道上方的信标的分布;该仪器把这种感应信号转变为音频报警信号从而确定管道位置。信标探测仪可探测圆柱形或环状的地下信标。不同埋设深度的信标对应不同的频率。该技术应用于地下非金属管道的定位。该方法可代替传统在非金属管道上方预埋设金属示踪带,并避免一旦示踪带被挖断就无法对管道进行定位的弊端。埋地信标探测法只适合于在管道施工时及管道抢修后,在管道重要的位置(如:三通,拐点,盲端)的上方布设信标,通过该方法可有效区分平行管道及交叉管道,给用户区分辩识管道提供依据. 脉冲探测法 非金属管线脉冲定位仪的适用范围:内部流体为液态,带压力的非金属管道。其原理是声波原理,利用声音在管道及其内部液体的传播特性来探测管道的位置。其基本使用方法是:利用振荡器给管道加一个特定频率的声音信号,利用拾音器在远端路面采集由管道传过来的声波,从而达到对管道的定位。非金属管线
脉冲定位仪只能对管道进行平面定位,不能测定埋深;由于声波的衰减特性,仪器最适用于小口径管道的探测上,大口径声波的衰减太快;对于埋设太深的管道探测难度较大;使用场所必须有管道设施的暴露点,以便安装振动器。 探地雷达法探测 雷达法探测是利用探地雷达电磁波,对所覆盖区域地下结构的导电性进行探测,利用不同物质的电介常数(导电性)的差异,从而区分出地下管道。雷达波的特性是:频率越高,所探测物的分辨率越高,同时衰减越快,探测深度越小;频率越低,分辩率越低,衰减慢探测深度大。影响雷达对管道探测的因素有:管道材质与周围回填物的导电差异, 相应的是管道导电性越好,导电差异越大,雷达反应也越明显;管道回填土的含水率,湿度越高越不利于雷达的分辨;雷达波的频率,选择合适的天线频率以满足对测深或分辩率的要求。同时雷达法探测不需要地面上有管道的相关构筑物或井等,但是只能做剖面探测,不能对管道进行追踪,若想在一定区域内探测,必须在区域内做网格状探测,要求越高网格的密度也需要越大。 链接:杭州领图信息科技有限公司
管线探测方法 (1)磁电充电法(或称直连法):发射机一端接金属管线,另一端接地,将交变电流直接注入地下金属管线,观测管线电流产生的磁场。可对各种金属管线进行扫描定位、测深、连续追踪并区分相邻管线。由于管线电流产生的信号很强,故信噪比和分辨率均较高,水平定位、垂直测深精度最高,但必须有金属管线出露点。在各种方法中,探测效果最好。 (2)电偶权感应法:发射机两端接地,在金属管线中产生感应电流,观测管线电流激励的电磁信号。可搜索、追踪地下各种金属管线。管线不需有地表露头,且信号较强,但应具备接地条件。在有接地条件的地段,可用来探测金属管线。 (3)磁偶极感应法:由发射线圈产生一次交变电磁场,使金属管线产生感应电流.观测管线中感应电流在地面上产生的二次电磁场以确定管线在地下的分布状态。在无管线露头及不具备接地条件的城市可用来确定管线走向、平面位置和埋深。仪器操作员活、方便、效率高、效果好,是目前应用最多的一种有效方法,但探测深度一般小于5m,并且相邻管线干扰严重。在磁偶极感应法中,若将发射线团(磁偶极子)送人管道内,在地面观测它产生的电磁场,则可以探测管道的位置和深度,而且特别适用于非金属管道的探测。探测深度大、效果好;但操作麻烦、成本高,探头容易在管道中遇阻或遇卡。 (4)信号夹钳法:用信号夹钳套在金属管线上,使其产生感应电流,观
测该电流的磁场。特点是:信号强,探测精度高,易分辨相邻管线,但必须有管线出露点,可用来对管径较小,且有出口点的金属管线进行定位和定深。 (5)50Hz法:利用动力电缆、邻近电缆或工业离散电流在金属管线中产生的50 Hz感应电流激励的电磁场,可探测动力电缆或金属管线。这种方法探测成本低、效率高、简单方便,但容易受到其他动力电缆的干扰,有的机型仅用接收机不能直读测深,可作为一种辅助 性的探测方法。 (6)甚低频法:利用甚低频(超长波)通讯电台发射的电磁被在地下金属管线中产生的感应二次电磁场来探测地下金属管线。其适用范围和优点与50 Hz法类似;缺点是受周围环境干扰大、探测精度低,管线电流与电台和管线方向有关。在一定条件下可用来搜索全局管线。 (7)音频大地电磁法:观测天然电磁场,在金属管线存在时,利用其所引起的地电特性的变化来探查管线位置。适于探测管径大、延伸较长的管线。仪器轻便,方法简单,探测深度大,但对密集分布的管线区分能力不高,测深误差大。在精度要求不高时,可探测金属和非金属管道。 (8)探地雷达法:由发射天线向地下发送高频短脉冲电磁波.接收天线接收从地下目标体反射至地表的电磁波来研究目标体。可探测各种金属与非金属管线。分辨率较其他方法高得多,但仪器价格昂贵。与频域电磁感应法一样,也是一种主要的探测方法。 (9)电阻率法:利用目标体与围岩电阻率的差异探测目标体的分
●更宽的频率调节范围(1.6kHz~1000kHz); ●更高的峰值功率; ●可广泛应用于塑胶按键及阳极铝打黑等项目上。 ●更快的开关光速度,打标速度更快。 在安装打标软件时,注意选择选择“YLPM型激光器”, 在控制界面,YLP-M比YLP-F多了一个打标参数:激光模式。共有8种激光模式可选。可直接把所需的模式填入。 8种模式都有标称频率,即RR值,如果设定的频率低于该值时,激光器会自动降低输出功率,以保护激光器。 其中,T1模式配160镜头可在阳极铝上打黑,其效果类似皮秒激光器; T2模式配254镜头也可在阳极铝上打黑,效果可与SPI激光器的3号波形的
效果媲美; 而打标参数与SPI 激光器3号波形下的参数大致相同。 另,T2模式可用在含激光粉的PC,ABS材料上打白。 6.1ns T2模式,RR=200kHz,上升时间:3.8ns,50%时的脉冲宽度:8.4ns,10%时的脉冲宽度: 15.4ns T3模式, RR=125kHz,上升时间:3.8ns,50%时的脉冲宽度:14.4ns,10%时的脉冲宽度:21.1n s T4模式, RR=105kHz,上升时间:3.8ns,50%时的脉冲宽度:14.9ns,10%时的脉冲宽度:26.3ns T5模式, RR=85kHz,上升时间:4.0ns,50%时的脉冲宽度:14.6ns,10%时的脉冲宽度:31.5ns
T6模式, RR=60kHz,上升时间:3.2ns,50%时的脉冲宽度:14.8ns,10%时的脉冲宽度:53.6ns T7模式, RR=40kHz,上升时间:3.3ns,50%时的脉冲宽度:24.5ns,10%时的脉冲宽度:100.3ns
常用腧穴 1、尺泽:在肘区,肘横纹上,肱二头肌腱桡侧缘凹陷中; 2、孔最:在前臂前区,腕掌侧远端横纹上7寸,尺泽与太渊连线上; 3、列缺:在前臂,腕掌侧远端横纹上1.5寸,拇短伸肌腱与拇长伸肌腱之间,拇长展肌腱沟的凹陷中; 4、鱼际:在手外侧,第一掌骨桡侧中点赤白肉际处; 5、少商:在手拇指末节桡侧,指甲根角侧上方0.1寸; 6、商阳:在手食指末节桡侧,指甲根角侧上方0.1寸; 7、合谷:在手背,第1、2掌骨间,当第2掌骨桡侧的中点处。 8、手三里:在前臂,阳溪穴与曲池穴连线上,肘横纹下2寸; 9、曲池:在肘区,尺泽与肱骨外上髁连线的中点处; 10、肩髃:在三角肌区,肩峰外侧缘前端与肱骨大结节两骨间凹陷中; 11、迎香:在面部,鼻翼外缘中点旁,鼻唇沟中; 12、地仓:在面部,口角旁开0.4寸; 13、下关:在面部,颧弓下缘中央与下颌切迹之间凹陷中; 14、头维:在头部,当额角发际直上0.5寸,头正中线旁开4.5寸; 15、天枢:在腹部,平脐中,前正中线旁开2寸; 16、梁丘:在股前区,髌底上2寸,股外侧肌与股直肌肌腱之间; 17、犊鼻:在膝前区,髌骨下缘髌韧带外侧凹陷中; 18、足三里:在小腿外侧,犊鼻穴下3寸,胫骨前嵴外一横指; 19、条口:在小腿外侧,犊鼻下8寸,胫骨前嵴外一横指; 20、丰隆:在小腿外侧,外踝尖上8寸,胫骨前肌外缘,条口旁开1寸; 21、内庭:在足背,第2、3趾间,趾蹼缘后方赤白肉际处; 22、公孙:在跖区,第一跖骨基底部的前下方赤白肉际处; 23、三阴交:在小腿内侧,内踝尖上3寸,胫骨内侧缘后际; 24、地机:在小腿内侧,阴陵泉下3寸,胫骨内侧缘后际; 25、阴陵泉:在小腿内侧,胫骨内侧踝下缘与胫骨内缘之间的凹陷中; 26、血海:在股前区,髌底内侧端上2寸,股内侧肌隆起处; 27、通里:在前臂区,腕掌侧远端横纹上1寸,尺侧腕屈肌腱的桡侧缘; 28、神门:在腕前区,腕掌侧远端横纹尺侧端,尺侧腕屈肌腱的桡侧缘处; 29、后溪:在手内侧,第5掌指关节尺侧近端赤白肉际凹陷中; 30、天宗:在肩胛区,肩胛冈中点与肩胛骨下角连线上1/3与下2/3交点凹陷中; 31、听宫:在面部,耳屏正中与下颌骨髁突之间的凹陷中; 32、攒竹:在面部,眉头凹陷中,额切迹处; 33、天柱:在颈后区,斜方肌外缘凹陷中,后发际正中旁开1.3寸; 34、肺俞:在脊柱区,第3胸椎棘突下,后正中线旁开1.5寸; 35、膈俞:在脊柱区,第7胸椎棘突下,后正中线旁开1.5寸; 36、胃俞:在脊柱区,第12胸椎棘突下,后正中线旁开1.5寸; 37、肾俞:在脊柱区,第2腰椎棘突下,后正中线旁开1.5寸; 38、大肠俞:在脊柱区,第4腰椎棘突下,后正中线旁开1.5寸; 39、次髎:在骶区,正对第2骶后孔中; 40、委中:在膝后区,腘横纹中点; 41、秩边:在骶区,平第4骶后孔,骶正中嵴旁开3寸; 42、承山:在小腿后区,腓肠肌两肌腹与肌腱交角处;
C series 激光器 用户使用指南
前言 (4) 第一章 C series激光器的结构及性能指标 (5) 1.1 C series激光器的内部结构组成 (5) 1.2 C series 激光器的性能指标 (5) 1.3 C series 激光器的光束传播特性 (7) 第二章 C series激光器的控制方法 (8) 2.1 激光器控制端口说明 (8) 2.2 C series激光器的反馈信号及应用 (9) 2.3 C series激光器的应用控制模式 (10) 2.3.1 用户需要准备的工具和材料 (10) 2.3.2 CW输出模式的控制方法 (11) 2.3.3 Gated CW输出模式的控制方法 (12) 第三章 C Series激光器的外围设备及要求 (13) 3.1 激光器外部设备概述 (13) 3.2 激光器的外部电源系统 (13) 3.2.1用户需准备的材料和工具 (14) 3.2.2激光器对电源的要求及注意事项 (14) 3.3 激光器的冷却系统 (15) 3.3.1风冷型冷却系统 (15) 3.3.2 水冷型冷却系统 (15) 3.3.2.1 用户需准备的工具与材料: (15) 3.3.2.2激光器对外部冷水机的要求: (15) 3.4激光器的外部控制系统 (16) 3.4.1 用户需准备的材料和工具 (16) 3.4.2激光器对外部控制信号的要求 (16) 3.5 激光器的外部光路保护系统 (17) 3.5.1 用户需准备的材料和工具 (17) 3.5.2激光器对外部光路防护装置的要求 (17) 3.6激光器的外部固定系统 (18) 第四章 C Series激光器用户疑问解答 (19) 附录 C Series激光器的外形尺寸 (22) 附录1.C30A外形尺寸 (22) 附录2 C30L外形尺寸 (23) 附录3 C55A外形尺寸 (24) 附录4 C55L外形尺寸 (24)
几种常用激光器得概述 一、CO2激光器 1、背景 气体激光技术自61年问世以来,发展极为迅速,受到许多国家得极大重视。特别就是近两年,以二氧化碳为主体工作物质得分子气体激光器得进展更为神速,已成为气体激光器中最有发展前途得器件。 二氧化碳分子气体激光器不仅工作波长(10、6微米)在大气“窗口”,而且它正向连续波大功率与高效率器件迈进。1961年,Pola-nyi指出了分子得受激振动能级之间获得粒子反转得可能性。在1964年1月美国贝尔电话实验室得C、K、N、Pate研制出第一支二氧化碳分子气体激光器,输出功率仅为1毫瓦,其效率为0、01%。不到两年,现在该类器件得连续波输出功率高达1200瓦,其效率为17 %,电源激励脉冲输出功率为825瓦,采用Q开关技术已获得50千瓦得脉冲功率输出。最近,有人认为,进一步提高现有得工艺水平,近期可以达到几千瓦得连续波功率输出与30~40%得效率。 2、工作原理 CO2激光器中,主要得工作物质由CO?,氮气,氦气三种气体组成。其中CO?就是产生激光辐射得气体、氮气及氦气为辅助性气体。加入其中得氦,可以加速010能级热弛预过程,因此有利于激光能级100及020得抽空。氮气加入主要在CO?激光器中起能量传递作用,为CO?激光上能级粒子数得积累与大功率高效率得激光输出起到强有力得作用。CO?分子激光跃迁能级图CO?激光器得激发条件:放电管中,通常输入几十mA或几百mA得直流电流。放电时,放电管中得混合气体内得氮分子由于受到电子得撞击而被激发起来。这时受到激发得氮分子便与CO?分子发生碰撞,N2分子把自己得能量传递给CO2分子,CO?分子从低能级跃迁到高能级上形成粒子数反转发出激光。 3、特点 二氧化碳分子气体激光器不但具有一般气体激光器得高度相干性与频率稳定性得特点,而且还具有另外三个独有得特点: (1)工作波长处于大气“窗口”,可用于多路远距离通讯与红外雷达。 (2)大功率与高效率( 目前,氩离子激光器最高连续波输出功率为100瓦,其效率为0、17 %,原子激光器得连续波输出功率一般为毫瓦极,其效率约为0、1%,而二氧化碳分子激光器连续波输出功率高达1200瓦,其效率为17%)。 (3)结构简单,使用一般工业气体,操作简单,价格低廉。由此可见,随着研究工作得进展、新技术得使用,输出功率与效率会不断提高,寿命也会不断增长,将会出现一系列新颖得应用。例如大气与宇宙通讯、相干探测与导航、超外差技术
几种常用激光器的概述 一、CO2激光器 1、背景 气体激光技术自61年问世以来,发展极为迅速,受到许多国家的极大重视。特别是近两年,以二氧化碳为主体工作物质的分子气体激光器的进展更为神速,已成为气体激光器中最有发展前途的器件。 二氧化碳分子气体激光器不仅工作波长(10.6微米)在大气“窗口”,而且它正向连续波大功率和高效率器件迈进。1961年,Pola-nyi指出了分子的受激振动能级之间获得粒子反转的可能性。在1964年1月美国贝尔电话实验室的C.K.N.Pate 研制出第一支二氧化碳分子气体激光器,输出功率仅为1毫瓦,其效率为0.01%。不到两年,现在该类器件的连续波输出功率高达1200瓦,其效率为17 %,电源激励脉冲输出功率为825瓦,采用Q开关技术已获得50千瓦的脉冲功率输出。最近,有人认为,进一步提高现有的工艺水平,近期可以达到几千瓦的连续波功率输出和30~40% 的效率。 2、工作原理 CO2激光器中,主要的工作物质由CO?,氮气,氦气三种气体组成。其中CO?是产生激光辐射的气体、氮气及氦气为辅助性气体。加入其中的氦,可以加速010能级热弛预过程,因此有利于激光能级100及020的抽空。氮气加入主要在CO?激光器中起能量传递作用,为CO?激光上能级粒子数的积累与大功率高效率的激光输出起到强有力的作用。CO?分子激光跃迁能级图CO?激光器的激发条件:放电管中,通常输入几十mA或几百mA的直流电流。放电时,放电管中的混合气体内的氮分子由于受到电子的撞击而被激发起来。这时受到激发的氮分子便和CO?分子发生碰撞,N2分子把自己的能量传递给CO2分子,CO?分子从低能级跃迁到高能级上形成粒子数反转发出激光。 3、特点 二氧化碳分子气体激光器不但具有一般气体激光器的高度相干性和频率稳定性的特点,而且还具有另外三个独有的特点: (1)工作波长处于大气“窗口”,可用于多路远距离通讯和红外雷达。 (2)大功率和高效率( 目前,氩离子激光器最高连续波输出功率为100瓦,其效率为0.17 %,原子激光器的连续波输出功率一般为毫瓦极,其效率约为0.1%,而二氧化碳分子激光器连续波输出功率高达1200瓦,其效率为17%)。 (3)结构简单,使用一般工业气体,操作简单,价格低廉。由此可见,随着研究工作的进展、新技术的使用,输出功率和效率会不断提高,寿命也会不断增长,将会出现一系列新颖的应用。例如大气和宇宙通讯、相干探测和导航、超外
60个常用穴位定位、主治、操作 1.急性腰椎痛 穴位:人中。 特点:开通闭塞,清热祛风。 用针:2寸针,在腰椎痛部位的对侧向迎香穴水平运针。 方法:站立位,进针1.5寸,轻轻用针刺激,直至患者感到疼痛。边捻针边让患者弯腰,至最大幅度时再回到直立位,同时向相反方向运针。反复操作2—3次,疼痛很快就会消失。 按:本人不同意这种所谓穴性的说法,穴位不像中药一样有寒热温凉偏性及以偏治偏达到治病目的,穴位主治跟腧穴不同分布、机体功能状态、施用工具甚至医师功夫水平等等关系很大。个人认为以药性定穴性是歧途!本人常用手背部腰痛一、二穴治疗急性腰扭伤,立竿见影,两穴同用效更大。 2.急性视神经炎 穴位:光明。 特点:清肝明目,消肿镇痛。治疗眼睛发痒疼痛、白内障、夜盲症、青盲及偏头痛。 用针方法:采用2寸针,直刺1.5寸,提插捻转,轻运针以导气,留针15—20分钟。 3.急性咽炎 有两种治法:(1)耳背静脉放血,在耳背选取最明显的静脉,用指端搓揉以引气,拇食指固定该处,用三棱针点刺,放出几滴血即可。 按:耳尖放血亦极效,配少商商阳点刺出血效更佳。 (2)穴位针刺额中穴,在印堂和神庭的中点。采用1.5寸针,刺向印堂。进针3/4寸,提插20秒钟,患者平卧留针30分钟。 按:本法疗效确彰,有人以此法治疗白喉极效! 4.急性结膜炎 用针方法:患侧耳尖,用三棱针刺耳尖,挤出3—5滴血即可。 5.闭经 穴位:上窷。 用针方法:用1.5寸针,直刺入骶后孔。尽可能确定行经的时间,如果不能,建议选择女性感觉不舒服或感觉心情不好的日子。患者站立,双脚微分,双肘支于桌上,以使耻骨和下腹部不受任何挤压,进针前医生应按压患者腹部5—8次,按下时要缓,放开时要快,这样可以对子宫产生有效刺激。进针1寸,顺时针捻转至最大幅度,留针,直至患者感到子宫收缩,反复操作3次。两侧穴位都要针刺。注意月经后25天再进行治疗。 按:与后面22痛经的治疗互参,二者操作有何异同之处?另长强治疗闭经亦极效,二者应都是针对继发性者,原发性闭经难治。 6.晕车晕机 穴位:安眠1,位于翳风合翳明穴中点胸锁乳突肌内,乳突下缘,翳风后1寸。安
非金属管线探测的四种 方法 -CAL-FENGHAI.-(YICAI)-Company One1
非金属管线探测的四种方法 移动信标探测法 利用信标探测仪定位管道,其基本的工作原理是通过追踪“信标”在管道中的移动从而定位管道的路径。信标可以做为一个小发射机来使用,使用时利用玻璃钢穿孔器和连接绳;或者利用刚性和半刚性电缆推进装置;或者利用CCTV管道爬行器将信标置入管道内部,利用信标探测器接收机在路面上接收信标发射的磁场信号,从而对管道定位和定深。从使用方法上来看,信标法探测的前题是只能应用于开放式的管道,即:非压力管道、重力管道、带有检修井或是窨井等设施。从这一层面来说只适用于:排水管道。信标法在探测范围上有很大的局限。 ? 固定信标探测法 EBEX300信标探测器通过发送可使地下信标感应的特定低频脉冲信号,定位预埋于地下管道上方的信标的分布;该仪器把这种感应信号转变为音频报警信号从而确定管道位置。信标探测仪可探测圆柱形或环状的地下信标。不同埋设深度的信标对应不同的频率。该技术应用于地下非金属管道的定位。该方法可代替传统在非金属管道上方预埋设金属示踪带,并避免一旦示踪带被挖断就无法对管道进行定位的弊端。埋地信标探测法只适合于在管道施工时及管道抢修后,在管道重要的位置(如:三通,拐点,盲端)的上方布设信标,通过该方法可有效区分平行管道及交叉管道,给用户区分辩识管道提供依据. ? ? 脉冲探测法 非金属管线脉冲定位仪的适用范围:内部流体为液态,带压力的非金属管道。其原理是声波原理,利用声音在管道及其内部液体的传播特性来探测管道的位置。其基本使用方法是:利用振荡器给管道加一个特定频率的声音信号,利用拾音器在远端路面采集由管道传过来的声波,从而达到对管道的定位。非金属管线脉冲定位仪只能对管道进行平面定位,不能测定埋深;由于声波的衰减特性,仪器最适用于小口径管道的探测上,大口径声波的衰减太快;对于埋
激光器的基本参数和基础知识 世界上第一台激光器出现于1960年,如今在许多领域中离不开激光器的应用,特别是生产、科研、医疗等这些领域。在不同的应用中所使用的激光器是不同的,所以我们需要了解激光器的参数,它直接决定了使用者对激光光源的选择。本文章整理了常规激光器的一些参数定义并做简单说明,希望能帮助大家能够找到合适的激光产品。 一、输出功率(激光功率) 激光器发出的光是以光能的形成出现,与电能一样,光能也是一种能源。与发电机的输出功率类似,激光器的输出功率也是一个度量单位时间内输出激光能量的物理量,常见的单位毫瓦(mW)、瓦(W)、千瓦(kW)。 二、功率稳定性 功率稳定性表征的是激光输出功率在一定时间内的不稳定度,一般分为RMS稳定性和峰峰值稳定性。 RMS稳定性:测试时间内所有采样功率值的均方根与功率平均值的比值,描述输出功率偏离功率平均值的分散程度。 峰峰值稳定性:输出功率的最大值和最小值之差与功率平均值的百分比,表示的是一定时间内的输出功率的变化范围。 三、光束质量因子(M2因子);光束参数积(BPP) 光束质量因子定义是激光束腰半径和光束远场发散角的乘积与理想基模光束束腰半径和基模发散角乘积的比值,即M2=θw/θ理想w理想。光束质量会影响到激光的聚焦效果以及远场的光斑分布情况,是用来表征激光光束质量的参数,实际激光光束质量因子越接近1,
横模的定义是垂直于激光传播方向上某一横截面上的稳定场的分布,激光器的光斑表征就是横模分布,通过光斑分析仪或激光轮廓分析仪可以将横模分布模拟出来,得到激光器的一些光束特征。常见的横模模式有基横模(TEM),TEM,TEM等,还有图1所示的其他模式,其中TEM模指的是在x方向的截面上有一点光强为0,TEM模指的是在x 和y方向截面均有一点光强为0。