
实验六 PID 控制系统参数优化设计
一.实验目的:
综合运用MATLAB 中SIMULINK 仿真工具进行复杂控制系统的综合设计与优化设计,综合检查学生的文献查阅、系统建模、程序设计与仿真的能力。
二.实验原理及预习内容:
1.控制系统优化设计:
所谓优化设计就是在所有可能的设计方案中寻找具有最优目标(或结果)的设计方法。控制系统的优化设计包括两方面的内容:一方面是控制系统参数的最优化问题,即在系统构成确定的情况下选择适当的参数,以使系统的某些性能达到最佳;另一方面是系统控制器结构的最优化问题,即在系统控制对象确定的情况下选择适当的控制规律,以使系统的某种性能达到最佳。
在工程上称为“寻优问题”。优化设计原理是“单纯形法”。MATLAB 中语句格式为:min ('')X f s =函数名,初值。
2.微分方程仿真应用:传染病动力学方程求解
三.实验内容:
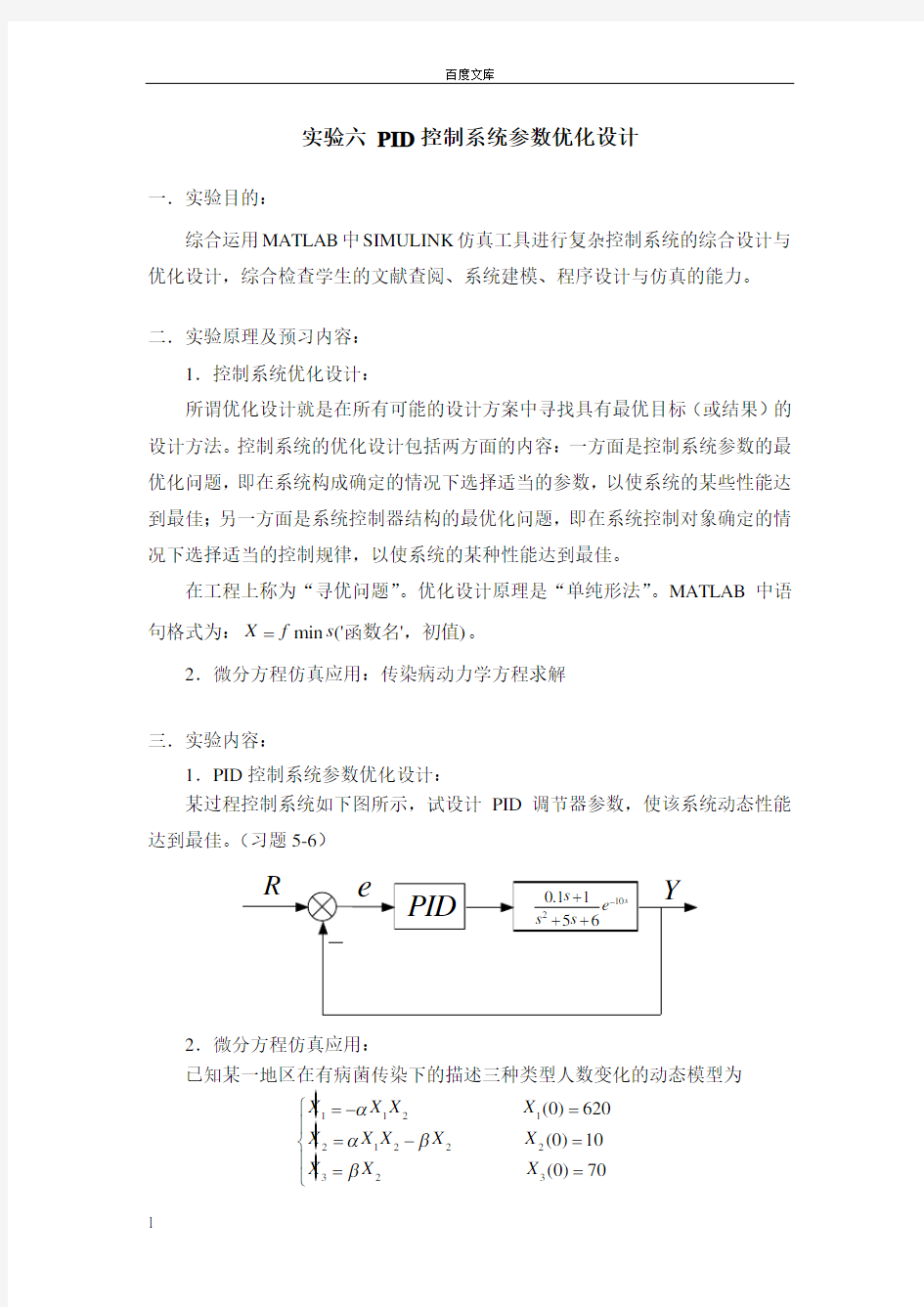
1.PID 控制系统参数优化设计:
某过程控制系统如下图所示,试设计PID 调节器参数,使该系统动态性能达到最佳。(习题5-6) 1020.1156s s e s s -+++R e PID Y
2.微分方程仿真应用:
已知某一地区在有病菌传染下的描述三种类型人数变化的动态模型为
11212122232
3(0)620(0)10(0)70X X X X X X X X X X X X ααββ?=-=?=-=??==?
式中,X 1表示可能传染的人数;X 2表示已经得病的人数;X 3表示已经治愈的人数;0.0010.072αβ==;。试用仿真方法求未来20年内三种人人数的动态变化情况。
四.实验程序:
建立optm.m 文件:
function ss=optm (x)
global kp;
global ki;
global kd;
global i;
kp=x (1);
ki=x (2);
kd=x (3);
i=i+1
[tt,xx,yy]=sim('optzwz',50,[]);
yylong=length(yy);
ss=yy(yylong);
建立tryopt.m 文件:
global kp;
global ki;
global kd;
global i;
i=1;
result=fminsearch('optm',[2 1 1])
建立optzwz.mdl:
结果:
result = 2.7011 0.4595 1.0911
优化前:
程序2:
建立wffc.m文件:
function dx=wffc(t,x)
a=0.001;
b=0.072;
dx=[-a*x(1)*x(2);a*x(1)*x(2)-b*x(2);b*x(2)];
建立shiyan2.m文件:
x0=[620;10;70];
[t,x]=ode45('wffc',[0,20],x0);
plot(t,x(:,1),'g',t,x(:,2),'p',t,x(:,3),'black.');
grid;
xlabel('时间(年)');
ylabel('三种类型人数(人)');
legend('x1可能传染的人数','x2已经得病的人数','x3已经治愈的人数'); title('20年内三种人人数动态变化曲线图');
结果: