《最优化方法》复习题(含答案)
附录5 《最优化方法》复习题 1、设n n A R ?∈是对称矩阵,,n b R c R ∈∈,求1()2 T T f x x Ax b x c =++在任意点x 处的梯度和Hesse 矩阵. 解 2(),()f x Ax b f x A ?=+?=. 2、设()()t f x td ?=+,其中:n f R R →二阶可导,,,n n x R d R t R ∈∈∈,试求()t ?''. 解 2()(),()()T T t f x td d t d f x td d ??'''=?+=?+. 3、设方向n d R ∈是函数()f x 在点x 处的下降方向,令 ()()()()() T T T T dd f x f x H I d f x f x f x ??=--???, 其中I 为单位矩阵,证明方向()p H f x =-?也是函数()f x 在点x 处的下降方向. 证明 由于方向d 是函数()f x 在点x 处的下降方向,因此()0T f x d ?<,从而 ()()()T T f x p f x H f x ?=-?? ()()()()()()()() T T T T T dd f x f x f x I f x d f x f x f x ??=-?--???? ()()()0T T f x f x f x d =-??+?<, 所以,方向p 是函数()f x 在点x 处的下降方向. 4、n S R ?是凸集的充分必要条件是12122,,,,,,,,m m m x x x S x x x ?≥?∈L L 的一切凸组合都属于S . 证明 充分性显然.下证必要性.设S 是凸集,对m 用归纳法证明.当2m =时,由凸集的定义知结论成立,下面考虑1m k =+时的情形.令1 1k i i i x x λ+==∑, 其中,0,1,2,,1i i x S i k λ∈≥=+L ,且1 1 1k i i λ+==∑.不妨设11k λ+≠(不然1k x x S +=∈, 结论成立),记11 1k i i i k y x λλ=+=-∑ ,有111(1)k k k x y x λλ+++=-+,
课程报告题目最优化理论与方法 学生姓名 学号 院系 专业 二O一二年十一月十日
最优化理论与方法综述 最优化方法是近几十年形成的,它主要运用数学方法研究各种系统的优化途径及方案,为决策者提供科学决策的依据。最优化方法的主要研究对象是各种管理问题及其生产经营活动。最优化方法的目的在于针对所研究的系统,求得一个合理运用人力、物力和财力的最佳方案,发挥和提高系统的效能及效益,最终达到系统的最优目标。实践表明,随着科学技术的日益进步和生产经营的日益发展,最优化方法已成为管理科学的重要理论基础和不可缺少的方法,被人们广泛地应用到公共管理、经济管理、工程建设、国防等各个领域,发挥着越来越重要的作用。这就是我理解的整个课程的流程。在这整个学习的过程当中,当然也会遇到很多的问题,不论是从理论上的还是从实际将算法编写出程序来解决一些问题。下面给出学习该课程的必要性及结合老师讲解以及在作业过程中遇到的问题来阐述自己对该课程的理解。 20世纪40年代以来,由于生产和科学研究突飞猛进地发展,特别是电子计算机日益广泛应用,使最优化问题的研究不仅成为一种迫切需要,而且有了求解的有力工具。因此最优化理论和算法迅速发展起来,形成一个新的学科。至今已出现线性规划、整数规划、非线性规划、几何规划、动态规划、随机规划、网络流等许多分文。 最优化理论与算法包括线性规划单纯形方法、对偶理论、灵敏度分析、运输问题、内点算法、非线性规划K-T条件、无约束最优化方法、约束最优化方法、参数线性规划、运输问题、线性规划路径跟踪法、信赖域方法、二次规划路径跟踪法、整数规划和动态规划等内容。 最优化理论所研究的问题是讨论在众多的方案中什么样的方案最优以及怎样找出最优方案。这类问题普遍存在。例如,工程设计中怎样选择设计参数,使得设计方案满足设计要求,又能降低成本;资源分配中,怎样分配有限资源,使得分配方案既能满足各方面的基本要求,又能获得好的经济效益;生产评价安排中,选择怎样的计划方案才能提高产值和利润;原料配比问题中,怎样确定各种成分的比例,才能提高质量,降低成本;城建规划中,怎样安排基本单位的合理布局,才能方便群众,有利于城市各行各业的发展;农田规划中,怎样安排各种农作物的合理布局,才能保持高产稳产,发挥地区优势;军事指挥中,怎样确定最佳作战方案,才能有效地消灭敌人,保存自己,有利于战争的全局;在人类活动的各个领域中,诸如此类,不胜枚举。最优化这一数学分支,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性强的学科。 一、最优化学习的必要性 最优化,在热工控制系统中应用非常广泛。为了达到最优化目的所提出的各种求解方法。从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大,或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。
《最优化方法》试题 一、 填空题 1.设()f x 是凸集n S R ?上的一阶可微函数,则()f x 是S 上的凸函数的一阶充要条件是( ),当n=2时,该充要条件的几何意义是( ); 2.设()f x 是凸集n R 上的二阶可微函数,则()f x 是n R 上的严格凸函数( )(填‘当’或‘当且仅当’)对任意n x R ∈,2()f x ?是 ( )矩阵; 3.已知规划问题22211212121212min 23..255,0z x x x x x x s t x x x x x x ?=+---?--≥-??--≥-≥?,则在点55(,)66T x =处的可行方向集为( ),下降方向集为( )。 二、选择题 1.给定问题222121212min (2)..00f x x s t x x x x ?=-+??-+≤??-≤?? ,则下列各点属于K-T 点的是( ) A) (0,0)T B) (1,1)T C) 1(,22 T D) 11(,)22T 2.下列函数中属于严格凸函数的是( ) A) 211212()2105f x x x x x x =+-+ B) 23122()(0)f x x x x =-< C) 2 222112313()226f x x x x x x x x =+++- D) 123()346f x x x x =+- 三、求下列问题
()22121212121211min 51022 ..2330420 ,0 f x x x x x s t x x x x x x =+---≤+≤≥ 取初始点()0,5T 。 四、考虑约束优化问题 ()221212min 4..3413f x x x s t x x =++≥ 用两种惩罚函数法求解。 五.用牛顿法求解二次函数 222123123123()()()()f x x x x x x x x x x =-++-++++- 的极小值。初始点011,1,22T x ??= ???。 六、证明题 1.对无约束凸规划问题1min ()2 T T f x x Qx c x =+,设从点n x R ∈出发,沿方向n d R ∈ 作最优一维搜索,得到步长t 和新的点y x td =+ ,试证当1T d Q d = 时, 22[() ()]t f x f y =-。 2.设12*** *3(,,)0T x x x x =>是非线性规划问题()112344423min 23..10f x x x x s t x x x =++++=的最优解,试证*x 也 是非线性规划问题 144423* 123min ..23x x x s t x x x f ++++=的最优解,其中****12323f x x x =++。
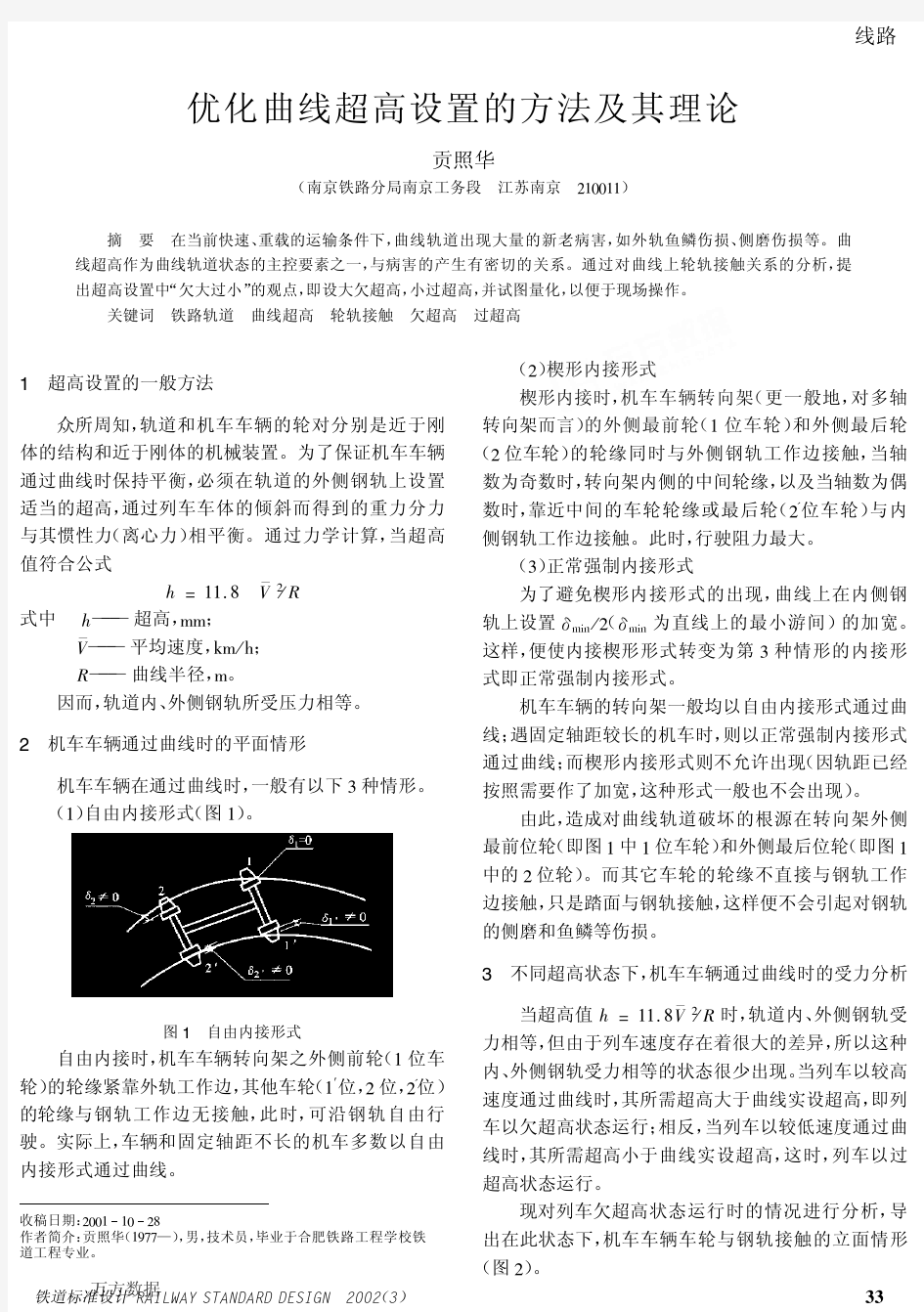
平曲线超高 一、超高及其作用 当汽车在弯道上行驶时,要受到离心力的作用,横向力是引起汽车不稳定行驶的主要因素。所以在平曲线设计时,常将弯道外侧边道抬高,构成与内侧车道同坡度的单向坡,这种设置称为平曲线超高。其作用是为了使汽车在圆曲线上行驶时能获得一个指向内侧的横向分力,用以克服离心力,减少横向力,从而保证汽车行驶的稳定性及乘客的舒适性。 二、超高横坡度的确定 超高横坡度的大小与公路等级、平曲线半径及公路所处的环境、自然条件、路面类型、车辆组成等因素有关。 超高横坡度可按下式计算: 即横向力系数的取值,主要考虑设置超高后抵消离心力的剩余横向力系数,其值的大小在0~ 之间,也与多种因素有关,如车速的大小、考虑快慢车的不同要求、乘客的舒适与路容之间的矛盾等。因此,对应于确定的行车速度,最大超高值的确定主要取决于曲线半径、路面粗糙率以及当地气候条件。 《规范》规定,高速公路、一级公路最大超高值为8%和10%,正常情况下采用8%;对设计速度高,或经验算运行速度高的路段宜采用10%。二、三、四级公路限定最大超高为8%是适宜的。但对于积雪冰冻地区,考虑我国以货车为主的特点,限定最大超高为6%比较安全。 《标准》规定,当平曲线半径小于不设超高的最小半径时,必须设置超高。超高值表见材料。 三、设置超高的一般规定和要求 1.各级公路当圆曲线半径小于不设超高的最小半径时,应在曲线上设置超高。一般地区的圆曲线最大超高值宜采用8%。
2.超高横坡度的大小按公路等级、圆曲线半径大小及公路所处的环境、自然条件、路面类型、车辆组成等因素合理确定。 3.各级公路圆曲线部分最小超高应于与该公路直线部分的正常路拱横坡度一致,以利于排水。 4.分向行驶的多车道公路位于纵坡较大的路段,其上、下坡的运行速度会有明显的差异,故可采用不同的超高值,以策安全。 5.二、三、四级公路混合交通量大且接城镇路段,或通过城镇作为街道使用的路段,当车速受到限制,按规定设置超高有困难时,可按表1-2-6规定设置超高。 6.位于曲线上的行车道、硬路肩,均应根据设计、圆曲线半径、自然条件等按表1-2-6规定设置超高值。 7.在有纵坡的弯道上设置超高时,应考虑合成纵坡 8.回旋线过长,超高渐变率过小,将导致曲线段路面排水不畅。因此应按排水要求超高渐变率不得小于0.3%,即1/330。 四、超高缓和段 (一)超高缓和段的过渡形式 从直线上的路拱双向坡断面,过渡到圆曲线上具有超高横坡度的单向坡断面,要有一个逐渐变化的区段,这一变化段称为超高缓和段。如图1-2-8所示,超高缓和段的形成过程,可根据不同的旋转基线可有二种情况(无中间带和有中间带公路)共六种形式。
天津大学《最优化方法》复习题(含答案) 第一章 概述(包括凸规划) 一、 判断与填空题 1 )].([arg )(arg min max x f x f n n R x R x -=∈∈ √ 2 {}{} .:)(m in :)(m ax n n R D x x f R D x x f ?∈-=?∈ ? 3 设.:R R D f n →? 若n R x ∈*,对于一切n R x ∈恒有)()(x f x f ≤*,则称*x 为最优化问题)(min x f D x ∈的全局最优解. ? 4 设.:R R D f n →? 若D x ∈*,存在*x 的某邻域)(*x N ε,使得对一切)(*∈x N x ε恒有)()(x f x f <*,则称*x 为最优化问题)(min x f D x ∈的 严格局部最优解. ? 5 给定一个最优化问题,那么它的最优值是一个定值. √ 6 非空集合n R D ?为凸集当且仅当D 中任意两点连线段上任一点属于D . √ 7 非空集合n R D ?为凸集当且仅当D 中任意有限个点的凸组合仍
属于D . √ 8 任意两个凸集的并集为凸集. ? 9 函数R R D f n →?:为凸集D 上的凸函数当且仅当f -为D 上的凹函数. √ 10 设R R D f n →?:为凸集D 上的可微凸函数,D x ∈*. 则对D x ∈?,有).()()()(***-?≤-x x x f x f x f T ? 11 若)(x c 是凹函数,则}0)( {≥∈=x c R x D n 是凸集。 √ 12 设{}k x 为由求解)(min x f D x ∈的算法A 产生的迭代序列,假设算法 A 为下降算法,则对{} ,2,1,0∈?k ,恒有 )()(1k k x f x f ≤+ . 13 算法迭代时的终止准则(写出三种):_____________________________________。 14 凸规划的全体极小点组成的集合是凸集。 √ 15 函数R R D f n →?:在点k x 沿着迭代方向}0{\n k R d ∈进行精确一维线搜索的步长k α,则其搜索公式
第一、填空题 1.组成优化设计的数学模型的三要素是 设计变量 、目标函数 和 约束条件 。 2.可靠性定量要求的制定,即对定量描述产品可靠性的 参数的选择 及其 指标的确定 。 3.多数产品的故障率随时间的变化规律,都要经过浴盆曲线的 早期故障阶段 、 偶然故障阶段 和 耗损故障阶段 。 4.各种产品的可靠度函数曲线随时间的增加都呈 下降趋势 。 5.建立优化设计数学模型的基本原则是在准确反映 工程实际问题 的基础上力求简洁 。 6.系统的可靠性模型主要包括 串联模型 、 并联模型 、 混联模型 、 储备模型 、 复杂系统模型 等可靠性模型。 7. 函数f(x 1,x 2)=2x 12 +3x 22-4x 1x 2+7在X 0=[2 3]T 点处的梯度为 ,Hession 矩阵为 。 (2.)函数()22121212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ????,海赛矩阵为2442-???? -?? 8.传统机械设计是 确定设计 ;机械可靠性设计则为 概率设计 。 9.串联系统的可靠度将因其组成单元数的增加而 降低 ,且其值要比可靠 度 最低 的那个单元的可靠度还低。 10.与电子产品相比,机械产品的失效主要是 耗损型失效 。 11. 机械可靠性设计 揭示了概率设计的本质。 12. 二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩阵正定。 13.对数正态分布常用于零件的 寿命疲劳强度 等情况。 14.加工尺寸、各种误差、材料的强度、磨损寿命都近似服从 正态分布 。 15.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 模型求解 两方面的内容。 17.无约束优化问题的关键是 确定搜索方向 。 18.多目标优化问题只有当求得的解是 非劣解 时才有意义,而绝对最优解存在的可能性很小。 19.可靠性设计中的设计变量应具有统计特征,因而认为设计手册中给出的数据
曲线超高计算公式为:h=11.8*V⒉/R h——外轨超高量. V——通过曲线时的列车速度(km/h); R——曲线半径(m)。 实际设置超高时,取其整数到5毫米,最大超高为150毫米.单线上下行速度悬殊时,不超过125毫米. 计算公式适用于改建铁路。 新建铁路推荐使用以下公式: h=7.6Vmax⒉/R 问题来了,原来的11.8为什么变成7.6了,那么这个新建铁路推荐公式是否可用? 还有个问题,缓和曲线内怎么顺完超高,例如现在有R=600,l=100(缓和曲线长),L=947. 02(曲线长),设计速度大概是60km/h吧,那么超高应该是多少,缓和曲线超高分段应该多少米? 我正矢是这么做的,(圆曲线正矢)Fc=50000/R=50000/600=83mm (缓和曲线正矢递减率)fs=Fc/n=83/10=8mm(缓和曲线长l=100m,所以我n=10m),求出fzh=fhz=fs/6=1mm,中间点正矢=对应点*fs。
我现对你提出2个的问题分别作答,不对之处请斧正: 1、实际上列车通过曲线的各次列车不尽相同,故准确表达式应为h=11.8V2/R 为了反映不同行驶速度和不同牵引力重量的列车对外轨超高值的不同要求,均衡内外轨的垂直磨耗,平均速度V=√(∑NGV2/∑NG) 其中N-每昼夜通过列车的相同速度和牵引重量的列车次数; G-列车总重。 在新建线设计和施工中,采用的平均速度V′由下式确定 V=0.8V(Max) 故有: h=7.6V(Max)∧2/R (mm) 其中V(Max)-预计该地段最大行车速度,以Km/h计。 2、不知道其他地方是怎么处理的,沪宁线的缓和曲线段内的超高设置相对比较简单,因为公式中R在缓和曲线段一直是变化的且R均比较大,所以设计院为了简化这个问题,一般采用从直线段0超高到圆曲线段超高(即超高最大),直线渐变的形式处理,即缓和曲线上i点的超高hi=h′*Li/L 其中Li-i点所在位置的曲线长 L-缓和曲线长 h′-圆曲线段超高值 希望能对你有所帮助!
最优化原理与方法复习 第1章最优化问题的基本概念§最优化的概念最优化就是依据最优化原理和方法,在满足相关要求的前提下,以尽可能高的效率求得工程问题最优解决方案的过程。§最优化问题的数学模型 1.最优化问题的一般形式?findx1,x2,?,xn?minf(x,x,?,x)?12 n? (x,x,?,x)?0u?1,2,?,pu12n??hv(x1,x2,?,xn)? 0v?1,2,?,q? 2.最优化问题的向量表达式?findX?minf(X)?? (X)?0??H(X)?0?式中:X?[x1,x2,?,xn]T G(X)?[g1(X),g2(X),?,gp(X)]T H(X)?[h1(X),h2(X),?,hp(X)]T 3.优化模型的三要素设计变量、约束条件、目标函数称为优化设计的三要素!设计空间:设计变量所确定的空间。设计空间中的每一个点都代表一个设计方
案。§优化问题的分类按照优化模型中三要素的不同表现形式,优化问题有多种分类方法:1按照模型中是否存在约束条件,分为约束优化和无约束优化问题2按照目标函数和约束条件的性质分为线性优化和非线性优化问题3按照目标函数个数分为单目标优化和多目标优化问题4按照设计变量的性质不同分为连续变量优化和离散变量优化问题第2章最优化问题的数学基础§n元函数的可微性与梯度一、可微与梯度的定义1.可微的定义设f(X)是定义在n维空间Rn的子集D上的n元实值函数,且X0?D。若存在n维向量L,对于任意n维向量P,都有f(X0?P)?f(X0)?LTPlim?0 P?0P则称f(X)在X0处可微。 2.梯度设有函数F(X),X?[x1,x2,?,xn]T,在其定义域内连续可导。我们把F(X)在定义域内某点X处的所有一阶偏导数构成的列向量,定义为F(X)在点X处的梯度。记
优化理论与方法
全局及个性化web服务组合可信度的动态规划评估方法摘要:随着Internet的快速发展,web服务作为一种软件构造形式其应用越来越广泛。单个web服务无法满足日益复杂的用户需求,web服务组合有效地解决了这个问题。然而,随着功能相似的web服务实例的不断出现,如何选择可信的web服务组合成为了人们关注的热点。服务选择依赖于web服务组合的评估结果,因此,本文主要从web服务组合着手,对其可信性进行研究,提供一种可信web服务组合评估方法。:针对web服务组合的全局及个性化问题,提出了基于全局的个性化web服务组合可信评估方法。从全局角度动态地调整评估模型;同时引入用户业务关注度来描述原子web服务对服务组合可信性的影响程度;结合前文的度量及评估方法,构建一个全局的个性化服务组合可信评估模型;并分析了模型的相关应用,给出了改进的动态规划模型。 关键字:web服务组合可信评价;全局个性化;动态规划; 0.引言 随着软件系统规模的日趋复杂,运行环境的不断开放,软件的可信性要求日益增加,可信软件成为了研究的热点。据《中国互联网发展状况统计报告》统计显示,截至2014年12月底,我国网民数量突破8亿,全年新增网民5580万。互联网普及率较上年底提升4个百分点,达到38。3%。因此,随着Internet 的广泛应用和网络技术的快速发展,面向服务的软件体系结构(SOA)作为一种新型的网络化软件应用模式已经被工业界和学术界广为接受。同时,网民对互联网电子商务类应用稳步发展,网络购物、网上支付、网上银行和在线旅游预订等应用的用户规模全面增长。因而,对web服务的可信性要求更高。单个
《最优化方法》复习题 第一章 引论 一、 判断与填空题 1 )].([arg )(arg m in m ax x f x f n n R x R x -=∈∈ √ 2 {}{}.:)(min :)(max n n R D x x f R D x x f ?∈-=?∈ ? 3 设.:R R D f n →? 若n R x ∈*,对于一切n R x ∈恒有)()(x f x f ≤*,则称*x 为最优化问题 )(min x f D x ∈的全局最优解. ? 4 设.:R R D f n →? 若D x ∈*,存在*x 的某邻域)(*x N ε,使得对一切)(*∈x N x ε恒有)()(x f x f <*,则称*x 为最优化问题)(min x f D x ∈的严格局部最 优解. ? 5 给定一个最优化问题,那么它的最优值是一个定值. √ 6 非空集合n R D ?为凸集当且仅当D 中任意两点连线段上任一点属于D . √ 7 非空集合n R D ?为凸集当且仅当D 中任意有限个点的凸组合仍属于D . √ 8 任意两个凸集的并集为凸集. ? 9 函数R R D f n →?:为凸集D 上的凸函数当且仅当f -为D 上的凹函数. √ 10 设R R D f n →?:为凸集D 上的可微凸函数,D x ∈*. 则对D x ∈?,有).()()()(***-?≤-x x x f x f x f T ? 11 若)(x c 是凹函数,则}0)( {≥∈=x c R x D n 是凸集。 √ 12 设{}k x 为由求解)(min x f D x ∈的算法A 产生的迭代序列,假设算法A 为单调下降算 法,则对{} ,2,1,0∈?k ,恒有 )()(1k k x f x f ≤+ .
路线平曲线小于600m 时,在曲线上设置超高。超高方式为,整体式路基采用绕路基中线旋转。 超高设计和计算 3.6.1确定路拱及路肩横坡度: 为了利于路面横向排水,应在路面横向设置路拱。按工程技术标准,采用折线形路拱,路拱横坡度为2%。由于土路肩的排水性远低于路面,其横坡度一般应比路面大1%~2%,故土路肩横坡度取3%。 3.6.2超高横坡度的确定: 为抵消车辆在曲线路段上行驶时所产生的离心力,当平曲线半径小于不设高的最小半径值时,应在路面上设置超高,而当平曲线半径大于不设超高时的最小半径时,即可不设超高。拟建公路为山岭重丘区三级公路,设计行车速度为40km/小时。按各平曲线所采用的半径不同,对应的超高值如表: 表3-1 圆曲线半径与超高 当按平曲线半径查表5-11所得超高值小于路拱横坡度值(2%)时,取2%。 (3)、缓和段长度计算: 超高缓和段长度按下式计算: P B L c i '?= 式中:c L ——超高缓和段长度(m); 'B ——旋转轴至行车道外侧边缘的(m); i ?——旋转轴外侧的超高与路拱横坡度的代数差; P ——超高渐变率,根据设计行车速度40km/小时,若超高旋转轴为路线中时,取1/150,若为边线则取1/100。 根据上式计算所得的超高缓和段长度应取成5m 的整数倍,并不小于
10m 的长度。拟建公路为无中间带的三级公路,则上式中各参数的取值如下: 绕行车道中心旋转:z y i i B B +=?= i ' , 2 绕边线旋转:y i B B =?=i ' , 式中:B ——行车道宽度(m); y i ——超高横坡度; z i ——路拱横坡度。 (4)、超高缓和段的确定: 超高缓和段长主要从两个方面来考虑:一是从行车舒适性来考虑,缓和段长度越长越好;二是从排水来考虑,缓和段越短越好,特别是路线纵坡度较小时,更应注意排水的要求。 3.6.3确定缓和段长度时应考虑以下几点: (1)、一般情况下,取缓和段长度和缓和曲线长相等,即s c L L =,使超高过渡在缓和曲线全长范围内进行。 (2)、若c s L L >,但只要横坡度从路拱坡度(-2%)过渡到超高横坡度(2%)时,超高渐变率330/1≥P ,仍取s c L L =。否则按下面两个方法处理: ①、在缓和曲线部分范围内超高。根据不设超高圆曲线半径和超高缓和段长度计算公式分别计算出超高缓和段长度,然后取两者中较大值,作为超高过渡段长度,并验算横坡从路拱坡度(-2%)过渡到超高横坡度(2%)时,超高渐变率是否大于1/330,如果不满足,则需采取分段超高的方法。 ②、分段超高。超高在缓和曲线全长范围内按两种超高渐变率分段进 行,第一段从双向路拱坡度z i 过渡到单向超高横坡z i 时的长度为 z c i B L '1660=,第二段的长度为12c s c L L L -=。 (3)、若s c L L >,则此时应修改平面线形,增加缓和曲线的长度。若平面线形无法修改时,宜按实际计算的长度取值,超高起点应从ZH (或HZ )点后退s c L L -长度。 3.6.4超高值计算公式:
中南大学考试试卷 2011--2012学年 1 学期 时间100分钟 最优化理论与方法 课程 48 学时 学分 考试形式: 闭 卷 专业年级: 信科08、应数08 总分100分,占总评成绩 70 % 注:此页不作答题纸,请将答案写在答题纸上,可用中英文作答。 1.(15 points ) For an unconstrained optimization problem: ),(min x f Let )0(x be a given point, )0(d be a descent search direction at )0(x . (1) With the exact line search, show that there is a steplength 0α satisfying .0)()0()0(0)0(=+?d d x f T α (2)Show that when applied to a quadratic objective function, the Newton method with the exact line search terminates in at most one iteration. 2. (15 points )For an unconstrained optimization problem: .2)(min 2 221x x x f += (1) Find a descent direction )0(d of f at .)1,1() 0(T x = (2) By the Armijo line search, find a steplength 0α along )0(d at .)0(x 3.(15 points ) (1)Let .2113???? ??=A Find two directions 1d and 2d such that 1d and 2d are conjugate with respect to the matrix A . (2)Show that when applied to a quadratic objective function, with the exact line search, the PRP conjugate gradient method is equivalent to the FR conjugate gradient method.
作用: ①仿真的过程也是实验的过程,而且还是系统地收集和积累信息的过程。尤其是对一些复杂的随机问题,应用仿真技术是提供所需信息的唯一令人满意的方法。 ②仿真技术有可能对一些难以建立物理模型或数学模型的对象系统,通过仿真模型来顺利地解决预测、分析和评价等系统问题。 ③通过系统仿真,可以把一个复杂的系统化降阶成若干子系统以便于分析,并能指出各子系统之间的各种逻辑关系。 ④通过系统仿真,还能启发新的策略或新思想的产生,或能暴露出在系统中隐藏着的实质性问题。同时,当有新的要素增加到系统中时,仿真可以预先指出系统状态中可能会出现的瓶颈现象或其它的问题。 2.简述两个Wardrop 均衡原理及其适用范围。 答: Wardrop提出的第一原理定义是:在道路的利用者都确切知道网络的交通状态并试图选择最短径路时,网络将会达到平衡状态。在考虑拥挤对行驶时间影响的网络中,当网络达到平衡状态时,每个 OD 对的各条被使用的径路具有相等而且最小的行驶时间;没有被使用的径路的行驶时间大于或等于最小行 驶时间。 Wardrop提出的第二原理是:系统平衡条件下,拥挤的路网上交通流应该按照平均或总的出行成本 最小为依据来分配。 第一原理对应的行为原则是网络出行者各自寻求最小的个人出行成本,而第二原理对应的行为原则是网络的总出行成本最小。 3.系统协调的特点。 答: (1)各子系统之间既涉及合作行为,又涉及到竞争行为。 (2)各子系统之间相互作用构成一个反馈控制系统,通过信息作为“中介”而构成整体 (3)整体系统往往具有多个决策人,构成竞争决策模式。 (4)系统可能存在第三方介入进行协调的可能。 6.对已经建立了概念模型的系统处理方式及其特点、适用范围。答:对系统概念模型有三种解决方式。 1.建立解析模型方式 对简单系统问题,如物流系统库存、城市公交离线调度方案的确定、交通量不大的城市交叉口交通控制等问题,可以运用专业知识建立系统的量化模型(如解析数学模型),然后采用优化方法确定系统解决方案,以满足决策者决策的需要,有关该方面的内容见第四、五章。 在三种方式中,解析模型是最科学的,但仅限于简单交通运输系统问题,或仅是在实际工程中一定的情况下(仅以一定的概率)符合。所以在教科书上很多漂亮的解析模型,无法应用于工程实际中。 2.建立模拟仿真模型方式 对一般复杂系统,如城市轨道交通调度系统、机场调度系统、城市整个交通控制系统等问题,可以对系统概念模型中各个部件等采用变量予以量化表示,并通过系统辨识的方式建立这些变量之间关系的动力学方程组,采用一定的编程语言、仿真技术使其转化为系统仿真模型,通过模拟仿真寻找较满意的优化方案,包括离线和在线均可以,有关该方面的内容见第七章。 模拟仿真模型比解析模型更能反映系统的实际,所以在交通运输系统中被更高层次的所使用,包括
R 2 V 8.11第一节 曲线超高的计算 一、曲线超高的确定 线路曲线地段,因列车沿曲线运行而产生离心力,车体被向外推甩,外股钢轨承受较大压力,旅客感觉不舒适,离心力过大能影响行车安全 。为抵消离心力作用,需要将外股钢轨抬高,即设置超高 。 设置超高的基本要求:保证两钢轨受力比较均匀;保证旅客有一定的舒适度, 保证行车平稳和安全 。在满足前两项要求的前提下,实现第三项要求是没有问题的 。 1.保证两股钢轨均匀受力条件的超高计算 (1)超高的理论计算 为了平衡离心力而设置超高,使离心力与车辆重量的合力为作用于轨道中心点,从而使两股钢轨所受压力相等 。如下图所示 ,J 与 G 的合力作用于 O 点时,则相应的超高为H ,将 g=9.8m/s 2 两股钢轨中心距离 1500 mm 代入离心力计算式,则计算超高的理论公式为: H= (2)平均速度的计算
通过一个曲线的列车种类 、列数 、重量和速度各不相同,为了合理地设置超高,在实际计算时,必须综合各种因素,采用平均速度 。在一般条件下,客车速度较高,列车质(重)量较小;货车速度较低,列车质(重)量较大 。考虑列车质(重)量计算出的超高,往往比不考虑列车质 (重)量计算出的超高要小,能使两股钢轨的垂直磨耗比较均匀 。为此采用列车速度平方及列车质(重)量加权平均方法计算平均速度,依此计算设置超高。 V J = ∑∑NiQi NiQiV i 2 H =R 2 J V 8.11 实测各类列车速度,宜在列车按运行图比较正常运行的条件下进行 。为使测得的列车速度具有普遍性,如一昼夜的车次很少,可实测几个昼夜的车速 。每类列车质(重)量为牵引质 (重)量加上机车质(重)量,可由各区段的统计资料中查得,或按列车运行图牵引质(重)量及机车质(重)量计算确定。 在城市地铁里是以每公里通过列数计算的,如“列?公里/公里”来计算通过量的。可从客运部门查来一个阶段如一个月的通过量, 也按这种列车速度平方及列车质(重)量加权平均方法计算出平均速度,并以此设置超高,能使乘客乘坐舒适又安全。 为便于管理,超高 h 按5mm 的倍数设置。 2.证旅客舒适条件的超高检算 各次列车是以各不相同的速度通过曲线前,设置的超高不可能使所产生的离心力完全得到平衡,因而普遍存在着超高剩余和超高不足现象 。超高剩余时产生未被平衡向心加速度,超高不足时产生未被平衡离心加速度 。超高剩余部分
《优化原理与方法》作业解答要点 5.1 建造一容积为V (m 3)的长方形蓄水池(无盖),要求选择其长、宽、高,使表面积最小,从而建筑用料最省。试写出此问题的数学模型。 [解] 选择设计变量x 1、x 2、x 3分别代表蓄水池的长、宽、高,优化数学模型为: 5.2 某公司有资金a 万元,可供选择购置的设备有n 种,已知相应于第i 种设备所需资金为 b i 万元,可得收益为 c i 万元,要求收益最大的投资安排。试写出其数学模型。 [解] 选择设计变量x 1、x 2、…、x n 分别代表n 种可选购设备的购买数量,优化数学模型为: 5.3 某城市要建造一供应服务中心,向该市m 个用户提供服务,设第i 个用户的位置为(a i , b i ),需要货物量为w i 吨,试寻求这个中心最经济的位置,使运输量(吨公里数)最小。 [解] 选择设计变量x 1、x 2代表中心的位置坐标,优化数学模型为: ?? ?? ? ?? ? ? ≥≥≥=??++= t..s 22 .min ],,[ 3min 32min 21min 1321313221321x x x x x x V x x x x x x x x x x x x T 使得寻求x ????? ? ???? ?? ? ?=?=≥≤?=∑∑==n i x n i x a x b x c x x x i i n i i i n i i i T n ,1,2, , ,1,2, ,0 t..s .max ] , ,,[ 1 1 21为整数使得寻求x ?? ??? -+-=∑=m i i i i T b x a x w x x 1222121)()( .min ],[ 使得寻求x
经济预测与决策 考试形式:闭卷考试时量:150分钟总分:100分 一.单选题1*15=15分 1.经济预测的第一步是()A A.确定预测目的,制定计划 B.搜集审核资料 C.建立预测模型 D.评价预测成果 2.对一年以上五年以下的经济发展前景的预测称为()B A.长期经济预测 B.中期经济预测 C.短期经济预测 D.近期经济预测 3.()回归模型中,因变量与自变量的关系是呈直线型的。C A.多元 B.非线性 C.线性 D.虚拟变量
4.以下哪种检验方法的零假设为:B1=B2=…=Bm=0?B A.r检验 B.F检验 C.t检验 D.DW检验 5.以数年为周期,涨落相间的波浪式起伏变动称为()D A.长期趋势 B.季节变动 C.不规则变动 D.循环变动 6. 一组数据中出现次数最多的变量值,称为()A A.众数 B.中位数 C.算术平均数 D.调和平均数 7. 通过一组专家共同开会讨论,进行信息交流和相互启发,从而诱发专家们发挥其创造性思维,促进他们产生“思维共振”,达到相互补充并产生“组合效应”的预测方法为()A A.头脑风暴法 B.德尔菲法
C.PERT预测法 D.趋势判断预测法 8.()起源于英国生物学家高尔登对人类身高的研究。B A.定性预测法 B.回归分析法 C.马尔科夫预测法 D.判别分析预测法 9.抽样调查的特点不包括()D A.经济性 B.时效性 C.适应性 D.全面性 10.下图是哪种多项式增长曲线()B A.常数多项式 B.一次多项式 C.二次多项式
D.三次多项式 11.根据历年各月的历史资料,逐期计算环比加以平均,求出季节指数进行预测的方法称为()C A.平均数趋势整理法 B.趋势比率法 C.环比法 D.温特斯法 12.经济决策按照目标的性质和行动时间的不同,分为()D A.宏观经济决策和微观经济决策 B.高层、中层和基层决策 C.定性决策和定量决策 D.战术决策和战略决策 13.()是从最好情况出发,带有一定冒险性质,反映了决策者冒进乐观的态度。B A.最大最小决策准则 B.最大最大决策准则 C.最小最小后悔值决策准则 D.等概率决策准则 14.如果某企业规模小,技术装备不良,担负不起较大的经济风险,则该企业应采用()A
最优化理论、方法及应用试题 一、 (30分) 1、针对二次函数1()2 T T f x x Q x b x c =++,其中 Q 是正定矩阵,试写出最速下降 算法的详细步骤,并简要说明其优缺点? 答:求解目标函数的梯度为()g x Qx b =+,()k k k g g x Q x b ==+,搜索方向:从k x 出发,沿k g -作直线搜索以确定1k x +。 Step1: 选定0x ,计算00,f g Step2: 做一维搜索, ()1min k k k t f f x t g +=-,1k k k x x tg +=-. Step3:判别,若满足精度要求,则停止;否则,置k=k+1,转步2。 优缺点:最速下降法在初始点收敛快,算法简单,在最优点附近有锯齿现象,收敛速度慢。 2、有约束优化问题 m in ()()0,1,2,,.. ()0,1,2,,i j f x g x i m s t h x j l ≥=???==?? 最优解的必要条件是什么? 答:假设*x 是极小值点。必要条件是f ,g ,h 函数连续可微,而且极小值点的所有起作用约束的梯度(*)(1,2,,)i h x i l ?= 和(*)(1,2,,)j g x j m ?= 线性无关,则 存在****** 12 12,,,,,,,,l m αααβββ 使得 ()1 1* * * * * * 1 212* * (*)*(*)*(*)0 *(*)0,1,2,,,,,,,,,0 0,0 l m i i j j i i j j l m i j f x h x g x g x j m α β βα ααβββαβ==?- ?- ?===≠>≥∑∑ 3、什么是起作用约束?什么是可行方向?什么是下降方向?什么是可行下降方向?针对上述有约束优化问题,如果应用可行方向法,其可行的下降方向怎样确定? 答:起作用约束:若0()0j g x =,这时点0x 处于该约束条件形成的可行域边界上,它对0x 的摄动起到某种限制作用。 可行方向:0x 是可行点,某方向p ,若存在实数00λ>,使得它对任意
一、 填空题 1 . 若 ()()??? ? ??+???? ?????? ??=212121 312112)(x x x x x x x f ,则 =?)(x f ,=?)(2x f . 2.设f 连续可微且0)(≠?x f ,若向量d 满足 ,则它是f 在x 处的一个下降方向。 3.向量T ) 3,2,1(关于3阶单位方阵的所有线性无关的共轭向量 有 . 4. 设R R f n →:二次可微,则f 在x 处的牛顿方向为 . 5.举出一个具有二次终止性的无约束二次规划算 法: . 6.以下约束优化问题: )(01)(..)(min 212121 ≥-==+-==x x x g x x x h t s x x f 的K-K-T 条件为: . 7.以下约束优化问题: 1 ..)(min 212 2 21=++=x x t s x x x f 的外点罚函数为(取罚参数为μ) . 二、证明题(7分+8分) 1.设1,2,1,:m i R R g n i =→和m m i R R h n i ,1,:1+=→都是线性函数,证明下 面的约束问题: } ,,1{, 0)(},1{, 0)(..)(min 1112 m m E j x h m I i x g t s x x f j i n k k +=∈==∈≥=∑= 是凸规划问题。
2.设R R f →2 :连续可微,n i R a ∈,R h i ∈,m i ,2,1=,考察如下的约束条件问题: } ,1{,0} 2,1{,0..) (min 11m m E i b x a m I i b x a t s x f i T i i T i +=∈=-=∈≥- 设d 是问题 1 ||||,0,0..)(min ≤∈=∈≥?d E i d a I i d a t s d x f T i T i T 的解,求证:d 是f 在x 处的一个可行方向。 三、计算题(每小题12分) 1.取初始点T x )1,1() 0(=.采用精确线性搜索的最速下降法求解下面的无约束优化问题 (迭代2步): 2 2212)(m in x x x f += 2.采用精确搜索的BFGS 算法求解下面的无约束问题: 212 2212 1)(min x x x x x f -+= 3.用有效集法求解下面的二次规划问题: . 0,001..42)(min 21212 12 221≥≥≥+----+=x x x x t s x x x x x f 4.用可行方向算法(Zoutend ij k算法或Frank Wol fe算法)求解下面的问题(初值设为)0,0() 0(=x ,计算到)2(x 即可): . 0,033..22 1)(min 212112 22121≥≥≤+-+-= x x x x t s x x x x x x f
铁路缓和曲线超高设置的分析 【摘要】针对目前铁路缓和曲线直缓(或缓直)、缓圆(或圆缓)点超高设置不合理的做法,按照铁路相关设计规范要求,在直线型超高顺坡的基础上,通过对缓和曲线外轨断面的设置,改善轮轨接触状态,提高动力响应。 【关键词】超高顺坡;竖曲线;缓和曲线超高设置 【 Abstract 】 In view of the present railway easement curve straight slow (or slow straight), slow (slow) or circle point ultra-high set unreasonable, in accordance with the relevant railway design specification requirements, on the basis of linear high slope, through to the easement curve rail profile Settings, improving the wheel/rail contact state, improving the dynamic response。 【 Key words 】 Ultra high slope; Vertical curve; Detente curve ultra high setting 1 概述 行驶在曲线轨道的机车车辆,出现一些与直线运行显著不同的受力特征,如转向力、离心力等。为了上述力不至于突然产生和消失,需要在直线与圆曲线轨道之间设置一段曲率半径和外轨超高逐渐变化的曲线,我们称这段曲线为缓和曲线。曲线超高是确定缓和曲线长度及曲线线间距加宽值等平面标准的主要参数,曲线超高的取值将对平面标准产生重要影响;影响列车行车速度、旅客舒适度和钢轨磨耗,甚至影响行车安全。 2 曲线超高与超高顺坡 2.1 确定超高 在线路曲线地段,应根据曲线半径和实测行车速度,在外股钢轨合理设置超高(允许速度大于120 km/h的线路宜按旅客的舒适条件进行检算和调整超高值)。超高按下列公式计算: 实设超高在满足欠超高、过超高容许范围的条件下,货物列车较多时,宜减