SensorService相关架构和流程指导
1.整体架构
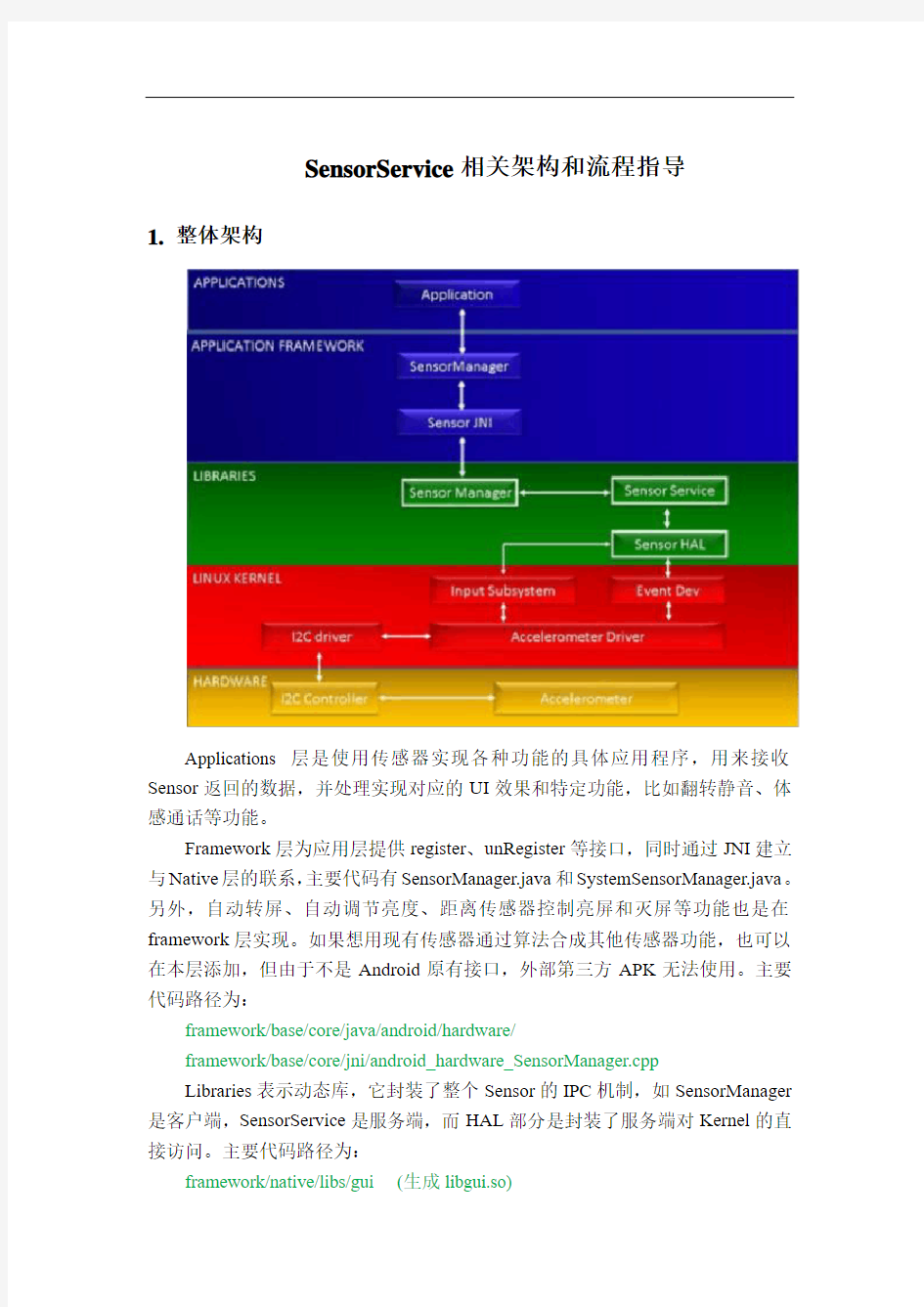
Applications 层是使用传感器实现各种功能的具体应用程序,用来接收Sensor返回的数据,并处理实现对应的UI效果和特定功能,比如翻转静音、体感通话等功能。
Framework层为应用层提供register、unRegister等接口,同时通过JNI建立与Native层的联系,主要代码有SensorManager.java和SystemSensorManager.java。另外,自动转屏、自动调节亮度、距离传感器控制亮屏和灭屏等功能也是在framework层实现。如果想用现有传感器通过算法合成其他传感器功能,也可以在本层添加,但由于不是Android原有接口,外部第三方APK无法使用。主要代码路径为:
framework/base/core/java/android/hardware/
framework/base/core/jni/android_hardware_SensorManager.cpp
Libraries表示动态库,它封装了整个Sensor的IPC机制,如SensorManager 是客户端,SensorService是服务端,而HAL部分是封装了服务端对Kernel的直接访问。主要代码路径为:
framework/native/libs/gui (生成libgui.so)
framework/native/services/sensorservice (生成libsensorservice.so)
hardware/qcom/sensors或hardware/hisense/sensors (生成sensor.xxx.so)
驱动注册到Kernel的Input Subsystem上,然后通过Event Device把Sensor 数据传到HAL层,准确说是HAL从Event读。硬件挂在I2C总线上。
2.类图
SensorClassDiagram.jpg
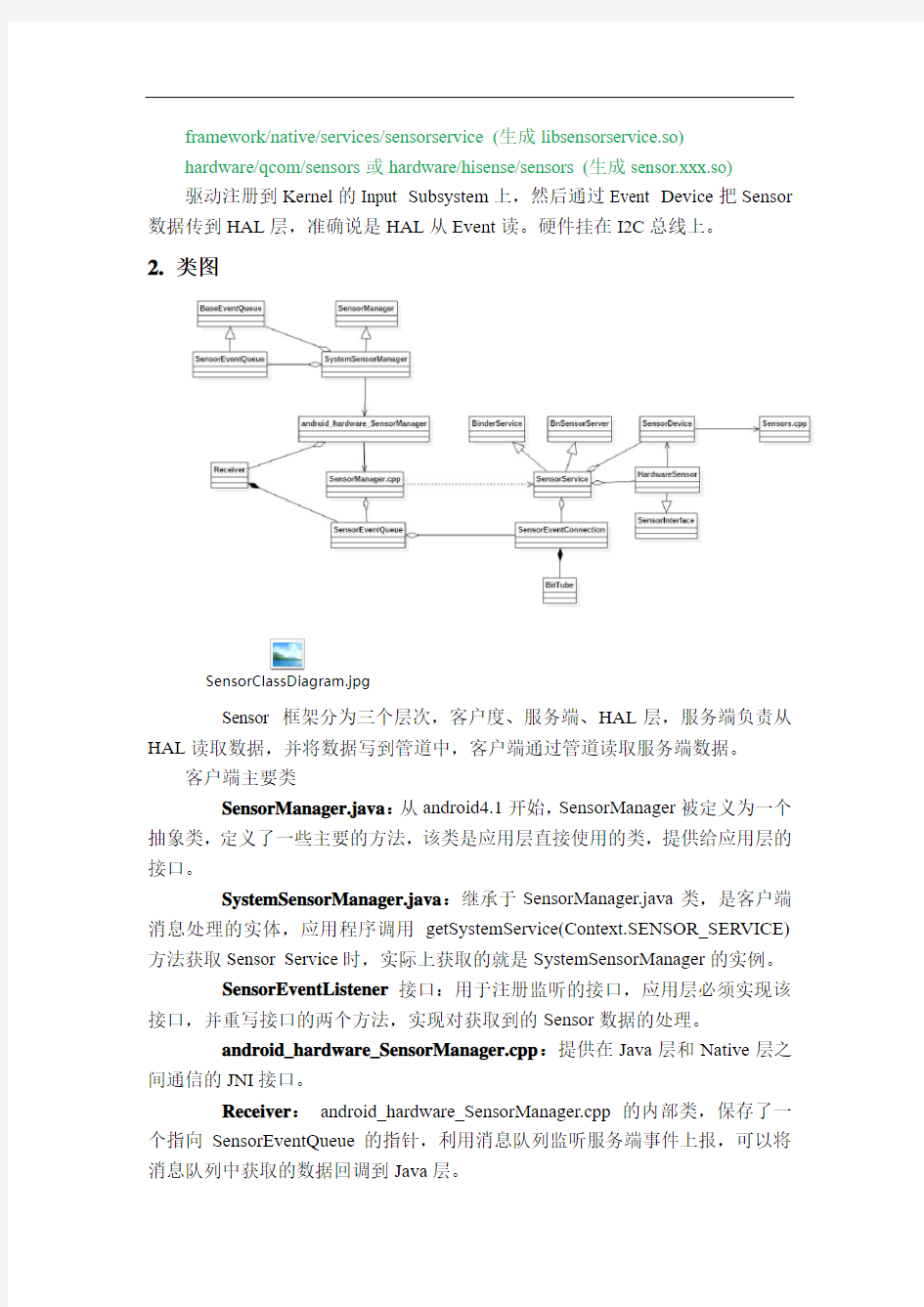
Sensor 框架分为三个层次,客户度、服务端、HAL层,服务端负责从HAL读取数据,并将数据写到管道中,客户端通过管道读取服务端数据。
客户端主要类
SensorManager.java:从android4.1开始,SensorManager被定义为一个抽象类,定义了一些主要的方法,该类是应用层直接使用的类,提供给应用层的接口。
SystemSensorManager.java:继承于SensorManager.java类,是客户端消息处理的实体,应用程序调用getSystemService(Context.SENSOR_SERVICE)方法获取Sensor Service时,实际上获取的就是SystemSensorManager的实例。
SensorEventListener接口:用于注册监听的接口,应用层必须实现该接口,并重写接口的两个方法,实现对获取到的Sensor数据的处理。
android_hardware_SensorManager.cpp:提供在Java层和Native层之间通信的JNI接口。
Receiver:android_hardware_SensorManager.cpp的内部类,保存了一个指向SensorEventQueue的指针,利用消息队列监听服务端事件上报,可以将消息队列中获取的数据回调到Java层。
SensorManager.cpp:sensor在Native层的客户端,负责与服务端SensorService.cpp通信
SenorEventQueue.cpp:消息队列,保存了指向SensorEventConnection 对象的指针,实现与SensorService之间的命令传输和数据读取。
服务端主要类
SensorService.cpp:服务端数据处理中心
SensorEventConnection:SensorService.cpp的内部类,从BnSensorEventConnection继承来,实现接口ISensorEventConnection的一些方法,ISensorEventConnection在SensorEventQueue会保存一个指针,指向调用服务接口创建的SensorEventConnection对象
BitTube.cpp:在这个类中创建了管道,用于服务端与客户端读写数据
SensorDevice:负责与HAL进行通信,传递命令和数据。
HAL层
Sensor.h是google为Sensor定义的Hal接口,单独提出去
3.API调用流程
当界面onResume()或者APP需要接收传感器数据的时候,应用层通过如下调用流程enable传感器,并指定接收到数据后的处理。
其中mSensorEventListener是实现SensorEventListener接口的子类对象,在该子类中必须重写onSensorChange() 和onAccuracyChanged(),对驱动上报的传感器数据进行处理。这两个方法的实现可以为空,表示对收到的数据不做任何处理。
当界面切到后台或不再需要接收传感器数据时,通过调用以下方法停止接收数据,并尝试将该Sensor关闭。
4.SensorService启动
应用层通过getSystemService()获取注册到ServiceManager中的系统服务,SENSOR_SERVICE返回的是SystemSensorManager类的对象,该类最终会通过Binder方式连接到Native层的SensorService。
SensorService.cpp的继承关系如上图所示,它的直接父类是BnSensorServer,BinderService和Thread,SensorManager.cpp通过Binder机制与SensorService.cpp 进行通信。SensorService的启动调用流程如下。
instantiate()方法是SensorService从BinderService类中继承的,具体实现如下图所示,该方法实际上就是生成了一个SensorService对象,并将其添加到ServiceManager中。
从addService的函数声明可以看出,第二个参数是对new SensorService()对象的强引用,因此当第一次构建sp强引用计数时,会调用SensorService::onFirstRef()函数。
onFirstRef()函数主要完成以下工作:初始化SensorDevice;获取HAL层传感器列表,根据支持的Hardware Sensor,初始化Virtual Sensor 列表,最终形成可支持的完整传感器列表;调用run()函数启动线程。
SensorDevice是一个单实例类,当调用getInstance()时,创建对象的工作由其父类Singleton
如果加载成功会调用sensors_open_1()函数去打开传感器设备,该函数的最终实现是在multihal.cpp或者sensors.cpp的open_sensors()中。接着通过get_sensors_list函数获取NativeSensorManager中的传感器列表,并依次将列表中的传感器置为非活跃状态。
SensorDevice的初始化工作完成后,SensorService的构造函数会获取HAL 层的传感器列表,并将列表中的传感器逐个进行注册。其中mSensorList用于保存SensorService中支持的全部传感器列表,mSensorMap中保存Sensor Handle 与Sensor对象指针的映射,mLastEventSeen保存Sensor Handle与Sensor Event 的映射,每接收到一次传感器事件,就会将对应的event更新一次。
注册完从HAL层获取的传感器列表后,根据是否支持陀螺仪,将旋转矢量、重力、线性加速度、方向传感器注册到Virtual Sensor。除了会将这些虚拟传感器类型添加到上面的三个集合外,还需要添加到mVirtualSensorList中。最终,mSensorList中就保存了包含Hardware Sensor和Virtual Sensor在内的,系统所能支持的全部传感器类型,
onFirstRef()函数最后调用run()函数来启动threadLooper()。threadLooper函数的核心功能就是不断循环等待获取HAL层传过来的传感器事件,对事件进行处理后分发给客户端。
循环体中首先通过device.poll()方法等待HAL层数据,数据到来后读取到mSensorEventBuffer中。该方法的最终实现在sensor_poll_context_t::pollEvents()方法中。
然后对当前所有的ActiveConnections做一个备份,并保存到有序Vector中。这样做是因为在本次循环尚未执行完时,有可能其中的一些Connection就已经被移除了,特别是One-Shot类型的事件。接下来,如果poll到的事件中存在wake-up Sensor Event,则申请一个PARTIAL_WAKE_LOCK类型的锁,阻止CPU 进入休眠。然后用mSensorEventBuffer中最新的事件更新registerSensor()时初始化的mLastEventSeen,每个handle都只保留最新的一个事件。
如果有虚拟传感器被启用,则会将Buffer中的传感器事件先传到SensorFusion中做一些处理,然后调用具体的虚拟传感器融合生成一个新的事件
添加到Buffer中。如果事件生成成功,则重新更新mLastEventSeen中对应虚拟传感器的最后一次event。
最后,通过SensorEventConnection::sendEvents()方法将Buffer中的传感器事件传输到客户端。sendEvents函数会过滤出只属于该Connection的事件进行上报,具体处理在传感器事件获取一节再详细讨论。
至此,SensorService的启动完成。当应用层调用getSystemService()获取传感器服务时,就能够连接到Native 层的SensorService,对传感器进行控制。
getSystemService.jpg
5.getDefaultSensor
Framework层一共定义了26种传感器的整型常量,其中21至25是Android L新增的支持类型。应用层可以通过引用这些字符串获得对应的传感器对象。如果想获得这26种之外的传感器对象,可以通过在getDefaultSensor方法中直接传入该Sensor对应的type数值获取,但这种方法不便于应用层使用。最佳方案是在Sensor.java中添加整型常量,应用层只需要引用相应的常量名,而不需要关心具体的type数值。但Sensor.java必须确保定义的常量与所代表的传感器type值相对应,不能随便赋值。
getDefaultSensor方法用于获取指定类型的传感器对象。如果存在多个相同类型的传感器,只返回列表中满足条件的第一个。getDefaultSensor(int)方法在5.0之前就一直存在,但Android L上对该方法的实现进行了修改,增加了对wakeUp Sensor类型的处理。TYPE_PROXIMITY、TYPE_SIGNIFICANT_MOTION、TYPE_TILT_DETECTOR、TYPE_WAKE_GESTURE、TYPE_GLANCE_GESTURE、TYPE_PICK_UP_GESTURE这六种类型应默认为wake-up Sensor。如果驱动侧没有为这六种传感器添加wake-up标识(SENSOR_FLAG_WAKE_UP_SENSOR),或者为其他传感器添加了wake-up标识,通过getDefaultSensor(int)方法都无法返回该传感器对象。
getDefaultSensor(int,boolean)是5.0上新增的方法,可用于获取指定type和wakeUp标识的传感器对象。比如8952上同时存在两种TYPE_PROXIMITY类型传感器,一个是可唤醒,一个不可唤醒。如果用getDefaultSensor(int)只能获取可唤醒的。但使用getDefaultSensor(int,false)就可以获取到非唤醒类型的距离传感器对象。
由于Android L之前的平台都只有getDefaultSensor(int)接口,为兼容以前的项目,应用层基本都是使用该方法获取指定类型传感器对象。为保证应用层能够正确获取到传感器对象,驱动在配置wakeUp Sensor标识时应按照该方法指定的六种传感器实施。
6.registerSensorListener
Register.jpg
Register执行时主要有两大步骤:一是创建framework与SensorService之间的数据通道,通过new SensorEventQueue()实现;二是将对应类型的传感器使能,通过addSensor()实现。
对于应用层而言,调用的API接口是SensorManager中的registerListener()方法,但SensorManager是一个abstract Class,主要负责将API接口提供给应用层调用,SystemSensorManager是其子类,该类中提供了方法的具体实现。
mSensorListeners是一个HashMap,保存了SensorEventListener对象与SensorEventQueue对象的对应关系。
Register开始执行时首先从mSensorListeners中检查该listener是否之前已经注册过,如果已经注册过直接调用addSensor启用Sensor,否则先创建一个SensorEventQueue对象,建立framework到Native的数据传输管道,然后再启用
传感器。
因为同一个SensorEventListener对象中有可能会处理多种类型传感器的数据,所以同一个listener有可能会同多个Sensor进行绑定。Register listener时如果发现mSensorListener表中已经存在该listener对象,则直接调用addSensor方法检查listener本次绑定的Sensor是否已启用,如果已启用则结束本次操作,否则继续启用本次要绑定的Sensor,但不会创建新的数据管道。也就是说同一个listener 可以被绑定到多种传感器上,但不可以被绑定到同一种类型的传感器上两次;一个Listener只能对应一个数据通道。
SensorEventQueue是BaseEventQueue的子类,在SensorEventQueue的构造函数中会首先构造BaseEventQueue,通过JNI调用将该BaseEventQueue对象与Native层进行关联,同时SensorEventQueue对象中也会保存一个对listener对象的引用。
nativeInitSensorEventQueue:
该方法首先调用SensorManager.cpp中的createEventQueue()创建同SensorService之间的数据传输通道。
mSensorServer是对ISensorServer对象的强引用,在SensorManager初始化时通过getService()方法在ServiceManager中查找“sensorservice”对应的服务,并赋值给mSensorServer。由第4小节可知,ServiceManager中返回的就是SensorService实例。从SensorService的类图也能看出,SensorService是ISensorServer的子类。
CreateSensorEventConnection()方法创建了一个SensorEventConnection对象,并将该对象的强引用返回给SensorManager。
SensorEventConnection是SensorService的内部类,该类在构造时主要进行了一些初始化参数列表工作,其中最主要的操作是new BitTube(),创建完成后,SensorEventConnection中会保存一个对BitTube对象的强引用。
BitTube是一个字节管道,可以在进程间进行数据传递。在构造BiTube对象时,首先创建一对匿名的、互相连接的Unix域套接字,然后将用于数据接收的Socket赋给mReciveFd,将用于数据发送的Socket赋给mSensorFd。
现在SensorService中的这部分工作已经完成,mSensorEventConnection中保存了对BitTube对象的强引用,SensorManager保存了对mSensorEventConnection 的强引用。接着SensorManager将mSensorEventConnection作为参数构造SensorEventQueue对象。
SensorEventQueue的构造函数中主要工作是初始化mRecBuffer数组,其中ASensorEvent结构体定义与hardware/sensors.h中sensors_event_t结构体完全一致。
由于SensorManager中生成的是SensorEventQueue的强引用,onFirstRef()函数会被调用。该函数的执行结果就是得到了mSensorEventConnection中保存的mBitTube对象引用。
由此,createSensorEventQueue()函数执行完成后,mSensorEventConnection中保存了mBitTube的引用,mSensorEventQueue中保存了mSensorEventConnection 和mBitTube的引用。
再返回到JNI部分,现在nativeInitSensorEventQueue中获得了mSensorEventQueue对象的引用,然后通过调用android_os_MessageQueue_getMessageQueue()得到一个MessageQueue对象的引用,利用mSensorEventQueue和mMessageQueue,以及Java层SensorEventQueue 对象来构造Receiver类实例。
Receiver负责监听服务端事件,并将事件回调给Java层SensorEventQueue 进行分发。事件监听的文件描述符及回调接口在onFirstRef函数中指定。mSensorQueue->getFd()中返回的是mBitTube中的mReceiveFd,this指定了监听到事件时的回调对象,当消息队列监听到mReceiveFd中有事件产生时,就会回调this->handleEvent()方法对事件进行处理。
handleEvent函数会对数据进行分类,最后回调Java层SensorEventQueue中的dispatchSensorEvent方法把数据分发到对应的SensorEventListener对象进行处理。至此,第一步new SensorEventQueue()完成。
第二步调用addSensor()方法启用传感器。首先从mActiveSensors中检查该传感器是否已激活,如果已激活则返回false。但是,mActiveSensors是BaseEventQueue的成员变量,不是SystemSensorManager的全局变量,每一个BaseEventQueue对象都对应一个mActiveSensors。考虑到一个BaseEventQueue
只能对应一个SensorEventListener,所以除非是mListener和Sensor对象都相同才会返回false,否则不管是同一种传感器注册了另一个Listener对象,还是同一个Listener注册到另一种传感器上,都会继续执行enableSensor。
enableSensor()会调用JNI层的nativeEnableSensor()函数,然后依次调用SensorEventQueue—> SensorEventConnection中的enableDisable()函数,由于注册Listener时是启用传感器,所以会执行SensorService的enable()函数,同时SensorEventConnection会将自身作为参数传递给enable()函数。
enable()函数会首先检查要启用的传感器是否已处于激活状态,如果未激活,则创建SensorRecord对象,用于管理连接到该类型传感器的SensorEventConnection对象。创建完成后将SensorEventConnection对象保存到其中,同时将该传感器handle和SensorRecord对象添加到mActiveSensors中。如果已激活,则只将mConnection添加到SensorRecord中,如果该传感器数据上报类型为ON_CHANGE,则立即将上一次得到的数据通过新mConnection上报。Sensor激活状态检查完成后,将要启用的Sensor Handle保存到mConnection中,用于标识该通道可以传递哪些类型传感器的数据,然后将该mConnection添加到mActivieConnection中。最后调用activate方法激活该传感器。
sensor是指向SensorInterface类实例的指针,不管是HardwareSensor,还是GravitySensor、OrientationSensor等Virtual Sensor都是其子类,这些子类的activate()方法最终都通过SensorDevice::activate()方法与HAL层Sensors.cpp中的sensors_poll_context_t::activate()进行关联。不同之处在于HardwareSensor中直接调用SensorDevice::activate()激活对应类型传感器,而Virtual Sensor是通过SensorFusion::activate()间接调用,并且会同时激活Acc、Mag、Gyro三种传感器。
7.onSensorChange
SensorService的主线程开始运行后,会通过poll()方法不断从HAL层获取数据,当获取到数据后,通过相应的SensorEventConnection对象写入到共享内存区域BitTube中,MessageQueue中会监听接收端mReceiverFd的事件,当有事件写入时,会将事件取出并回调Receiver::handleEvent()方法,接着通过JNI机制回调Java层SystemSensorManager的内部类SensorEventQueue中的dispatchSensorEvent()方法,该方法最终将数据分发给对应的SensorEventListener 进行处理。
DataTransfer.jpg
7.1 SensorService::threadLoop()
SensorService启动后,threadLoop()函数不断循环等待HAL层上报的数据。
mSensorDevice在SensoerDevice类对象构造时通过open_sensor_1()函数进行初始化,Qcom Sensor HAL中该方法的最终实现是在sensors.cpp的open_sensors()函数。在open_sensors()中,函数指针poll被赋值为poll__poll()函数的地址。
poll__poll()函数体内就是调用sensor_poll_context_t::pollEvents()函数,pollEvents()会依次查看每个传感器是否有事件产生,若有则通过NativeSensorManager::readEvents()方法读取事件。遍历完全部传感器并读取到了事件,或者未遍历完全部传感器但已读取到指定数量的事件,都会将事件返回给
Native层。如果没有读取到事件,则继续下一次循环,知道读取到事件为止。
7.2 SensorEventConnection::sendEvents()
threadLoop中获取到HAL上报的数据后,会对数据进行判断和处理,然后通过SensorEventConnection::sendEvents()方法将数据通过对应的数据通道上报给应用层。
从下面的代码可以看出,数据会在当前所有活跃的Connection中都处理一遍,同时,如果connection中包含数据上报类型为One-Shot的传感器,则上报一次数据后,会将本数据通道自动停用。
虽然从代码看,数据在当前所有活跃的Connection中都处理了一次,但每个Connection只传递自己特定类型传感器的数据才是正解,而不是不管什么类型传感器的数据都传递一遍。
在SensorEventConnection对象中保存了一个Sensor Handle集合,标识了该Connection可以传递哪些类型传感器的数据。由第6节流程可知,在SensorService::enable()函数中,会调用mConnection->addSensor(handle)函数,将本次要enable的Sensor handle保存到Connection对象中。
在sendEvents()函数中,会将数据依次取出,获取其所属传感器的类型,如果有与本Connection中保存的Sensor handle类型相同的数据,则传递之;否则,不传递。由此可以确保每个Connection只传递指定类型Sensor数据。
如果有满足本mConnection数据传输要求的数据,则通过如下方法将数据写入到构造SensorEventConnection对象时创建的BitTube共享内存中。
BitTube中创建了一对匿名套接字,并将发送数据的socket赋值给mSendFd,将接收数据的Socket赋值给mReceiveFd。在JNI层,Receiver类中的MessageQueue添加了mReceiveFd为监听节点,SensorService中通过mSendFd 将数据写入后,MessageQueue监听到有事件产生,会回调Receiver::handleEvent()函数。handleEvent()首先通过SensorEventQueue::read()函数从BitTube中读取ASensorEvent类型数据,每次最多读取16个。read()函数的实质就是Socket通信中的recv()函数,通过mReceiveFd读取数据。
当读取到数据后,handleEvent会按照传感器类型对数据进行简单处理,然后回调Java层BaseEventQueue类的dispatchSensorEvent方法。
BaseEventQueue的dispatchSensorEvent方法是一个abstract方法,具体实现是在BaseEventQueue的子类SensorEventQueue和TriggerEventQueue中。对于事件上报类型为OneShot的Sensor,register时会创建TriggerEventQueue,其他类型的创建SensorEventQueue。dispatchSensorEvent中的主要操作就是将JNI回调时传过来的数据转换成SensorEvent对象,然后通过mListener.onSensorChanged()将数据分发给应用层进行处理。
总结:一个SensorEventListener对象只能对应一个SensorEventQueue和一个SensorEventConnection,每个SensorEventConnection对象中都保存了一个Sensor handle列表,用于标识该数据通道允许传输的Sensor数据类型。如果一个SensorEventListener中同时对多种传感器数据进行处理,不会创建多个数据通道,只是将Sensor 添加到SensorEventConnection的Sensor handle列表中。
传感器的主要参数特性 传感器的种类繁多,测量参数、用途各异.共性能参数也各不相同。一般产品给出的性能参数主要是静态特性利动态特性。所谓静态特性,是指被测量不随时间变化或变化缓慢情况下,传感器输出值与输入值之间的犬系.一般用数学表达式、特性曲线或表格来表示。动态特性足反映传感器随时间变化的响应特性。红外碳硫仪动恋特性好的传感器,其输出量随时间变化的曲线与被测量随时间变化的曲线相近。一般产品只给出响应时间。 传感器的主要特性参数有: (1)测量范围(量程) 量程是指在正常工种:条件下传感器能够测星的被测量的总范同,通常为上限值与F 限位之差。如某温度传感器的测员范围为零下50度到+300度之间。则该传感器的量程为350摄氏度。 (2)灵敏度 传感器的灵敏度是指佑感器在稳态时输出量的变化量与输入量的变化量的比值。通常/d久表示。对于线性传感器,传感器的校准且线的斜率就是只敏度,是一个常量。而非线性传感器的灵敏度则随输入星的不同而变化,在实际应用巾.非线性传感器的灵敏度都是指输入量在一定范围内的近似值。传感器的足敏度越高.俏号处理就越简单。 (3)线性度(非线性误差) 在稳态条件下,传感器的实际输入、输出持件曲线勺理想直线之日的不吻合程度,称为线性度或非线性误差,通常用实际特性曲线与邵想直线之司的最大偏关凸h m2与满量程输出仪2M之比的百分数来表示。该系统的线性度X为 (4)不重复性 z;重复性是指在相同条件下。传感器的输人员技同——方向作全量程多次重复测量,输出曲线的不一致程度。通常用红外碳硫仪3次测量输11j的线之间的最大偏差丛m x与满量程输出值ym之比的百分数表示,1、2、3分别表示3次所得到的输出曲线.它是传感器总误差中的——项。 (5)滞后(迟滞误差) 迟滞现象是传感器正向特性曲线(输入量增大)和反向特性曲线(输入量减小)的不重合程度,通常用yH表示。
阅读报告 生物传感器 教学单位:机电工程学院 专业名称:机械设计制造及其自动化 学号: 学生姓名: 指导教师: 指导单位:机电工程学院 完成时间: 电子科技大学中山学院教务处制发
生物传感器 摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。 生物传感器(biosensor),是一种对生物物质敏感并将其浓度转换为电信号进行检测的仪器。是由固定化的生物敏感材料作识别元件(包括酶、抗体、抗原、微生物、细胞、组织、核酸等生物活性物质)、适当的理化换能器(如氧电极、光敏管、场效应管、压电晶体等等)及信号放大装置构成的分析工具或系统。生物传感器具有接受器与转换器的功能。 关键词:传感器生物传感器
目录 1 生物传感器 (1) 1.1生物传感器简介 (1) 2 生物传感器的介绍 (2) 2.1组成结构及工作原理 (2) 2.2技术特点 (2) 2.3国内外应用发展情况及应用案例 (3) 2.3.1国内应用发展 (3) 2.3.2国外应用发展 (3) 2.3.3应用案例 (4) 参考文献 (6)
A.中国传感器整体市场规模分析与预测 中国“十三五”规划中正式启动了“中国制造2025”战略,力争到2025年由“制造业大国”成长为“制造业强国”。传感器与制造业息息相关,“中国制造2025”对传感器产品的智能化、信息化、网络化方向发展提出更高要求。MIR预计中国传感器市场必将获得更快的增长。(见表1、图1) 表1:中国传感器市场规模增长预期 图1:2013-2018年中国传感器市场规模 由MIR统计结果可以看出:2013-2014年,中国传感器市场一直在平稳增长。在2015年,由于中国工业大环境不景气,传感器市场增速有所放缓。但MIR预计随着“中国制造2025”战略的实施,传感器市场并将有所回温。 B.中国传感器整体市场分析-行业应用 根据MIR的统计结果显示,接近80%的传感器应用于OEM行业,在项目型行业和科研院所有20%左右的应用。(见表2)
表2:2015年中国传感器产品市场整体规模-行业 C.中国传感器整体市场分析-供应商 根据MIR的统计结果显示,外资品牌尤其是日系品牌占据了中国传感器市场的绝大部分市场份额。(见表3)
表3:2015年中国传感器产品市场整体规模供应商
D. 中国传感器整体市场分析-产品 根据MIR对中国传感器市场的调研结果来看,2015年中国传感器市场的产品中,编码器、光电传感器、光纤传感器依然是传感器市场的主流产品,占据了55%的市场份额。(见表4、图2) 表4:2015年中国传感器产品市场整体规模-产品 图2:2015年中国传感器产品市场整体规模-产品 E.产品市场细分 E1.编码器市场分析 中国编码器市场规中,HEIDENHAIN、TAMAGAWA以及禹衡占据了超过50%的市场份额。
光敏传感器光电特性测量实验 光敏传感器是将光信号转换为电信号的传感器,也称为光电式传感器,它可用于检测直接引起光强度变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其它非电量,如零件直径、表面粗糙度、位移、速度、加速度及物体形状、工作状态识别等。光敏传感器具有非接触、响应快、性能可靠等特点,因而在工业自动控制及智能机器人中得到广泛应用。 光敏传感器的物理基础是光电效应,即半导体材料的许多电学特性都因受到光的照射而发生变化。光电效应通常分为外光电效应和内光电效应两大类。外光电效应是指在光照射下,电子逸出物体表面的外发射的现象,也称光电发射效应,基于这种效应的光电器件有光电管、光电倍增管等。内光电效应是指入射的光强改变物质导电率的物理现象,称为光电导效应。几乎大多数光电控制应用的传感器都是此类,通常有光敏电阻、光敏二极管、光敏三极管、硅光电池等。当然近年来新的光敏器件不断涌现,如:具有高速响应和放大功能的APD雪崩式光电二极管,半导体色敏传感器、光电闸流晶体管、光导摄像管、CCD图像传感器等,为光电传感器进一步的应用开创了新的一页。本实验主要是研究光敏电阻、硅光电池、光敏二极管、光敏三极管四种光敏传感器的基本特性。光敏传感器的基本特性包括:伏安特性、光照特性、时间响应、频率特性等。掌握光敏传感器基本特性的测量方法,为合理应用光敏传感器打好基础。 【实验目的】 了解硅光电池的基本特性,测出它的伏安特性曲线和光照特性曲线。 仪器简介 仪器由全封闭光通路、实验电路、待测光敏传感器(光敏电阻、光敏二极管、光敏三极管、硅光电池)、实验连接线等组成。 仪器安装在360×220×80(mm)实验箱内,仪器面板如下图
1、什么是传感器的静态特性?它有哪些性能指标? 如何用公式表征这些性能指标? 2、什么是传感器的动态特性? 其分析方法有哪几种? 3、什么是传感器的静特性?主要指标有哪些?有何实际意义? 4、什么是传感器的基本特性?传感器的基本特性主要包括哪两大类?解释其定义并分别列出描述这两大特性的主要指标。(要求每种特性至少列出2种常用指标) 1、 答:传感器的静态特性是它在稳态信号作用下的输入-输出关系。静态特性所描述的传感器的输入、输出关系式中不含有时间变量。 传感器的静态特性的性能指标主要有: ① 线性度:非线性误差 max L FS L 100%Y γ?=± ? ② 灵敏度:y n x d S = d ③ 迟滞:max H FS H 100%Y γ?=? ④ 重复性:max R FS R 100%Y γ ?=±? ⑤ 漂移:传感器在输入量不变的情况下,输出量随时间变化的现象。 2、答:传感器的动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性。 传感器的动态特性可以从时域和频域两个方面分别采用瞬态响应法和频率响应法来分析。 知识点:传感器的动态特性 3、答:传感器的静态特性是当其输入量为常数或变化极慢时,传感器的输入输出特性,其主要指标有线性度、迟滞、重复性、分辨力、稳定性、温度稳定性、各种抗干扰稳定性等。传感器的静特性由静特性曲线反映出来,静特性曲线由实际测绘中获得。通常人们根据传感器的静特性来选择合适的传感器。 知识点:传感器的静态特性 4、答:传感器的基本特性是指传感器的输入-输出关系特性。 传感器的基本特性主要包括静态特性和动态特性。其中,静态特性是指传感器在稳态信号作用下的输入-输出关系,描述指标 有:线性度(非线性误差)、灵敏度、迟滞、重复性和漂移;动态特性是指传感器对动态激励(输入)的响应(输出)特性,即其输出对随时间变化的输入量的响应特性,主要描述指标有:时间常数、延迟时间、上升时间、峰值时间、响应时间、超调量、幅频特性和相频特性。 1、什么叫应变效应? 利用应变效应解释金属电阻应变片的工作原理。 2、试简要说明电阻应变式传感器的温度误差产生的原因,并说明有哪几种补偿方法。 1、 答:材料的电阻变化由尺寸变化引起的,称为应变效应。 应变式传感器的基本工作原理:当被测物理量作用在弹性元件上,弹性元件在力、力矩或压力等的作用下发生形变,变换成相应的应变或位移,然后传递给与之相连的应变片,将引起应变敏感元件的电阻值发生变化,通过转换电路变成电量输出。输出的电量大小反映了被测物理量的大小。 2、答: 温度误差产生原因包括两方面: 温度变化引起应变片敏感栅电阻变化而产生附加应变,试件材料与敏感栅材料的线膨胀系数不同,使应变片产生附加应变。 温度补偿方法,基本上分为桥路补偿和应变片自补偿两大类。 3、什么是直流电桥?若按桥臂工作方式不同,可分为哪几种?各自的输出电压如何计算? 4、为什么应变式传感器大多采用交流不平衡电桥为测量电路?该电桥为什么又都采用半桥和全桥两种方式? 5、应用应变片进行测量为什么要进行温度补偿?常采用的温度补偿方法有哪几种? 6、应变式传感器的基本工作原理是什么? 3、答:桥臂的供电电源是直流电的称为直流电桥。 按桥臂工作方式不同,可分为单臂直流电桥、半桥差动直流电桥、全桥差动直流电桥。 单臂直流电桥输出电压为: 半桥差动直流电桥输出电压为: 全桥差动直流电桥输出电压为: 4、答:由于应变电桥的输出电压很小,一般要加放大器,但直流放大器易产生零漂, 所以应变电桥多采用交流电桥。又由于交流电桥的供电电源是交流,为了消除应变片引线寄生电容的影响,同时也为了满足交流电桥的平衡条件,常采用不平衡电桥测量电路。 交流不平衡电桥采用半桥和全桥的方式是为了消除非线性误差和提高系统灵敏度。 5、答:由于电阻温度系数的影响以及试件材料和电阻丝材料的线膨胀系数的影响,会给电阻应变片的测量带来误差,因此需要进行温度补偿。 常采用的温度补偿法有电桥补偿法和应变片自补偿法。 6、答:应变式传感器的基本工作原理:当被测物理量作用在弹性元件上,弹性元件在力、力矩或压力等的作用下发生形变,变换成相应的应变或位移,然后传递给与之相连的应变片,将引起应变敏感元件的电阻值发生变化,通过转换电路变成电量输出。输出的电量大小反映了被测物理量的大小。 2、变隙式电感传感器的输出特性与哪些因素有关? 3、怎样改善变隙式电感传感器非线性?怎样提高其灵敏度? 4、差动变压器式传感器有几种结构形式? 各有什么特点? 5、差动变压器式传感器的零点残余电压产生的原因是什么?怎样减小和消除它的影响? 2、答:变隙式电感传感器的输出特性与衔铁的活动位置、供电电源、线圈匝数、铁芯间隙有关。 3、答:为改善变隙式电感传感器的非线性可采用差动结构。 如果变压器的供电电源稳定,则传感器具有稳定的输出特性; 另外,电源幅值的适当提高可以提高灵敏度,但要以变压器铁芯不饱和以及允许温升为条件。增加次级线圈和初级线圈的匝数比值和减小铁芯间隙都能使灵敏度提高。 知识点:变隙式电感传感器 4、答:差动变压器式传感器主要有变隙式差动传感器和螺线管式差动变压器两种结构形式。 差动变压器式传感器根据输出电压的大小和极性可以反映出被测物体位移的大小和方向。 螺线管式差动变压器如采用差动整流电路,可消除零点残余电压,根据输出电压的符号可判断衔铁的位置,但不能判断运动的方向;如配用相敏检波电路,可判断位移的大小和方向。 5、答:零点残余电压的产生原因:传感器的两次极绕组的电气参数与几何尺寸不对称,导致它们产生的感应电势幅值不等、相位不同,构成了零点残余电压的基波;由于磁性材料磁化曲线的非线性(磁饱和,磁滞),产生了零点残余电压的高次谐波(主要是三次谐波)。 为了减小和消除零点残余电压,可采用差动整流电路。 6、保证相敏检波电路可靠工作的条件是什么? 6、答:保证相敏检波电路可靠工作的条件是检波器的参考信号u o 的幅 值远大于变压器的输出信号u 的幅值,以便控制四个二极管的导通状态,且u o 和差动变压器式传感器的激励电压共用同一电源。 1、根据电容式传感器工作原理,可将其分为几种类型?每种类型各有什么特点?各适用于什么场合? 2、如何改善单极式变极距电容传感器的非线性? 3、电容式传感器有哪几种类型? 4、差动结构的电容传感器有什么优点? 5、电容式传感器主要有哪几种类型的信号调节电路?各有些什么特点? 6、简述电容式传感器的工作原理与分类。 1、 答:根据电容式传感器的工作原理,可将其分为3种:变极板间距的变极距型、变极板覆盖面积的变面积型和变介质介电常数的变介质型。 变极板间距型电容式传感器的特点是电容量与极板间距成反比,适合测量位移量。 变极板覆盖面积型电容传感器的特点是电容量与面积改变量成正比,适合测量线位移和角位移。 变介质型电容传感器的特点是利用不同介质的介电常数各不相同,通过介质的改变来实现对被测量的检测,并通过电容式传感器的电容量的变化反映出来。适合于介质的介电常数发生改变的场合。 2、答:单极式变极距电容传感器的灵敏度和非线性对极板初始间隙的要求是相反的,要改善其非线性,要求应增大初始间隙,但这样会造成灵敏度的下降,因此通常采用差动结构来改善非线性。 3、答:电容式传感器其分为3种:变极板间距的变极距型、变极板覆盖面积的变面积型和变介质介电常数的变介质型。 4、答:差动结构的电容传感器的优点是灵敏度得到提高,非线性误差大大降低。 5、答:电容式传感器的电容值及电容变化值都十分微小,因此必须借助于信号调节电路才能将其微小的电容值转换成与其成正比的电压、电流或频率,从而实现显示、记录和传输。相应的转换电路有调频电路、运算放大器、二极管双T 型交流电桥、脉冲宽度调制电路等。 调频电路的特点:灵敏度高,可测量0.01μm 级位移变化量;抗干扰能力强;特性稳定;能取得高电平的直流信号(伏特级),易于用数字仪器测量和与计算机通讯。 运算放大器的特点:能够克服变极距型电容式传感器的非线性,使其输出电压与输入位移间存在线性关系。 二极管双T 型交流电桥的特点:线路简单,不须附加相敏整流电路,便可直接得到较高的直流输出电压(因为电源频率f 很高)。 脉冲宽度调制电路的特点:适用于变极板距离和变面积式差动电容传感器,且为线性特性。 6、答:电容式传感器利用了将非电量的变化转换为电容量的变化来实现对物理量的测量。 当被测参数变化引起A 、εr 或d 变化时,将导致电容量C 随之发生变化。在实际使用中,通常保持其中两个参数不变,而只变其中一个参数,把该参数的变化转换成电容量的变化,通过策略电路转换为电量输出。因此,电容式传感器可分为3种:变极板间距离的变极距型、变极板覆盖面积大变面积型和变介质介电常数的变介质型。 8、提高其灵敏度可以采取哪些措施,带来什么后果? 8.答:要提高灵敏度,应减小初始间隙d 0,但这使得非线性误差增大,即灵敏度和非线性误差对d 0的要求是矛盾的。在实际应用中,为了既提高灵敏度,又减小非线性误差,通常采用岔洞结构。 1、什么叫正压电效应? 2、什么是逆压电效应? 3、什么叫纵向压电效应? E R R n n U o 11 2)1(?+= 1 12R R E U o ?=11R R E U o ?=
第3章传感器基本特性 一、单项选择题 1、衡量传感器静态特性的指标不包括()。 A. 线性度 B. 灵敏度 C. 频域响应 D. 重复性 2、下列指标属于衡量传感器动态特性的评价指标的是()。 A. 时域响应 B. 线性度 C. 零点漂移 D. 灵敏度 3、一阶传感器输出达到稳态值的50%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 4、一阶传感器输出达到稳态值的90%所需的时间是()。 A. 延迟时间 B. 上升时间 C. 峰值时间 D. 响应时间 5、传感器的下列指标全部属于静态特性的是() A.线性度、灵敏度、阻尼系数 B.幅频特性、相频特性、稳态误差 C.迟滞、重复性、漂移 D.精度、时间常数、重复性 6、传感器的下列指标全部属于动态特性的是() A.迟滞、灵敏度、阻尼系数 B.幅频特性、相频特性 C.重复性、漂移 D.精度、时间常数、重复性 7、不属于传感器静态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移 8、对于传感器的动态特性,下面哪种说法不正确() A.变面积式的电容传感器可看作零阶系统 B.一阶传感器的截止频率是时间常数的倒数 C.时间常数越大,一阶传感器的频率响应越好 D.提高二阶传感器的固有频率,可减小动态误差和扩大频率响应范围9、属于传感器动态特性指标的是() A.重复性 B.固有频率 C.灵敏度 D.漂移
10、无论二阶系统的阻尼比如何变化,当它受到的激振力频率等于系统固有频率时,该系统的位移与激振力之间的相位差必为() A. 0° B.90° C.180° D. 在0°和90°之间反复变化的值 11、传感器的精度表征了给出值与( )相符合的程度。 A.估计值 B.被测值 C.相对值 D.理论值 12、传感器的静态特性,是指当传感器输入、输出不随( )变化时,其输出-输入的特性。 A.时间 B.被测量 C.环境 D.地理位置 13、非线性度是测量装置的输出和输入是否保持( )关系的一种度量。 A.相等 B.相似 C.理想比例 D.近似比例 14、回程误差表明的是在( )期间输出-输入特性曲线不重合的程度。 A.多次测量 B.同次测量 C.正反行程 D.不同测量 =秒的一阶系统,当受到突变温度作用后,传感器输15、已知某温度传感器为时间常数τ3 出指示温差的三分之一所需的时间为()秒 A.3 B.1 C. 1.2 D.1/3 二、多项选择题 1.阶跃输入时表征传感器动态特性的指标有哪些?() A.上升时间 B.响应时间 C.超调量 D.重复性 2.动态响应可以采取多种方法来描述,以下属于用来描述动态响应的方法是:() A.精度测试法 B.频率响应函数 C.传递函数 D.脉冲响应函数 3. 传感器静态特性包括许多因素,以下属于静态特性因素的有()。 A.迟滞 B.重复性 C.线性度 D.灵敏度 4. 传感器静态特性指标表征的重要指标有:() A.灵敏度 B.非线性度 C.回程误差 D.重复性 5.一般而言,传感器的线性度并不是很理想,这就要求使用一定的线性化方法,以下属于线性化方法的有:() A.端点线性 B.独立线性 C.自然样条插值 D.最小二乘线性 三、填空题 1、灵敏度是传感器在稳态下对的比值。 2、系统灵敏度越,就越容易受到外界干扰的影响,系统的稳定性就越。 3、是指传感器在输入量不变的情况下,输出量随时间变化的现象。 4、要实现不失真测量,检测系统的幅频特性应为,相频特性应为。
光电传感器测转速实验 实 验 指 导 书
简 介 一、本实验装置的设计宗旨: 本实验装置具有设计性、趣味性、开放性和拓展性,实验中大量重复的接线、调试和后续数据处理、分析、可以加深学生对实验仪器构造和原理的理解,有利于培养学生耐心仔细的实验习惯和严谨的实验态度。非常适合大中专院校开设开放性实验。本实验装置采用了性能比较稳定,品质较高的敏感器件,同时采用布局较为合理且十分成熟的电路设计。 二、光电传感器测转速实验实验装置 1.传感器实验台部分 2.九孔实验板接口平台部分:九孔实验板作为开放式和设计性实验的一个桥梁(平台); 3.JK-19型直流恒压电源部分:提供实验时所必须的电源; 4.处理电路模块部分:差动放大器、电压放大器、调零、增益、移相等模块组成。 三、主要技术参数、性能及说明: (1)光电传感器:由一只红外发射管与接收管组成。 (2)差动放大器:通频带kHz 10~0可接成同相、反相、差动结构,增益为100~1倍的直流放大器。 (3)电压放大器:增益约为5位,同相输入,通频带kHz 10~0。 (4)19JK -型直流恒压电源部分:直流V 15±,主要提供给各芯片电源: V 6 ,V 4 ,V 2±±±分三档输出,提供给实验时的直流激励源;V 12~0:A 1ax Im =作 为电机电源或作其它电源。 光电传感器测转速实验 【实验原理】 如图所示:光电传感器由红外发射二极管、红外接收管、达林顿出管及波形整形组成。
发射管发射红外光经电机转动叶片间隙,接收管接收到反射信号,经放大,波形整形输出方波,再经转换测出其频率,。 图1 【实验目的】 了解光电传感器测转速的基本原理及运用。 【实验仪器】 如图所示,光电式传感器、JK-19型直流恒压电源、示波器、差动放大器、电压放大器、频率计和九孔实验板接口平台。 图2 图3 【实验步骤】 1.先将差动放大器调零,按图1接线;
世界传感器市场分析(32)—半导体生产设备中的UCM传感器 超声传感器、电容传感器、磁传感器一般统称为UCM传感器,该类传感器目前已 经非常普及,在水处理、石油、化工、化学、汽车等领域已具有了成熟的市场。但据有 关市场研究表明, UCM传感器在半导体生产设备(SEM)方面目前尚处于早期发展阶段。 SEM主要用于半导体产品生产、装配和性能测试,是一个资本密集的全球性行业。随着半 导体技术的迅速发展,对SEM提出了更高的要求,促使其加快技术的进步与更新以适应时 代的需求,所以该行业有望成为UCM传感器的主要市场。 目前,UCM传感器在半导体行业的应用还是比较有限的,但其销售额却持续增长。2000年 UCM传感器在SEM领域的总销售额为1.249亿美元,年增长率为6.9%,2001年达到了1.443 亿美元,年增长速度达到了7.1%。预计到2007年7.1%的年增长率将会保持,且随着UCM传 感器价格的下降,其需求量还会增加。 UCM传感器主要包括基于超声原理的流量传感器、物位传感器和位置传感器,电容式的接 近传感器、位置传感器和压力传感器,基于磁学原理的位置和流量传感器。由于价格昂 贵,尤其是超声流量计和电磁流量计,使UCM在SEM领域的应用受到了限制。然而,随着 半导体生产商不断引进新的技术,这些传感器将会有更广泛的应用。有关专家也分析了 几种不利于市场发展的因素。首先,半导体企业已经开始自己生产传感装置,并趋向于 向数字化技术和电子技术方向发展。其次,传感器市场的国际化也使传感器生产向国际 化发展,最后,传感器技术还无法满足半导体行业严格的生产标准。
技术的革新对UCM传感器的销量增长起着巨大的作用。例如目前最新型的MEMS传感器—超 声MEMS传感器已研制成功,它采用硅基超声传感技术,既经济又实用,代表了超声传感 器技术的发展前沿。与原有的超声传感器相比,MEMS超声传感器在性能方面有了质的提 高,而在价格方面却有了一定量的下降,很好地满足了高性能、低价格的大量应用的需 求。 半导体生产商越来越需要高精度、高静压与高智能的测试设备,传感器生产商也正在努 力满足这方面的需要,当前有向数字输出与界面化发展的趋势。如在磁性传感器领域较 为重要的进展就是其智能化单片集成系统。在主板上设置内存最主要的优点是可以使霍 尔位置传感器生产商制作出更多更好的智能传感器。SMART技术在超声与电容传感器方面 也同样越来越重要。 2000年超声传感器在SEM领域的年销售额达到了2860万美元。流量测量方面,多普勒超声 流量计更多地应用于较脏的环境中,半导体生产的超净环境倾向于选用传统的计时流量 计。超声物位传感器是一种利用声波的非接触式测量系统,而超声接近传感器则是通过 激发压电信号产生声波,检测目标物是否存在或测量到目标物的距离。超声传感器随着 精度的不断提高,销售量也在提升,但是巨额开发成本也在一定程度上阻碍了市场的扩 张。 2000年电容式传感器在SEM市场的销售额达到了3200万美元,这其中主要包括电容式位置 传感器、接近传感器和压力传感器。非接触式位置传感器具有较高的分辨率且比较牢固 耐用。接近传感器在探测非金属目标的场合是理想的选择。压力传感器价格昂贵,市场
光电传感器特性分析 摘要:随着科技的发展,人类越来越注重信息和自动化,在日常的生产学习过 程中,人们常常要进行自动筛选、自动传送,而为了实现这些,光电传感发挥了不可磨灭的作用。光敏传感器的物理基础是光电效应,即光敏材料的电学特性因受到光的照射而发生变化。 关键词:光电效应、光电传感器、光敏材料 一、 理论基础——光电效应 光电效应通常分为外光电效应和内光电效应两大类。外光电效应是指在光照射下,电子逸出物体表面的外发射的现象,也称光电发射效应,基于这种效应的光电器件有光电管、光电倍增管等。内光电效应是指入射的光强改变物质导电率的物理现象,称为光电导效应,大多数光电控制应用的传感器,如光敏电阻、光敏二极管、光敏三极管、硅光电池等都属于内光电效应类传感器。 1.外光电效应 光照在照在光电材料上,材料表面的电子吸收的能量,若电子吸收的能量足够大,电子会克服束缚逸出表面,从而改变光电子材料的导电性,这种现象成为外光电效应。 根据爱因斯坦的光电子效应,光子是运动着的粒子流,每种光子的能量为hv(v 为光波频率,h 为普朗克常数),由此可见不同频率的光子具有不同的能量,光波频率越高,光子能量越大。假设光子的全部能量交给光子,电子能量将会增加,增加的能量一部分用于克服正离子的束缚,另一部分转换成电子能量。根据能量守恒定律: 式中,m 为电子质量,v 为电子逸出的初速度,w 为逸出功。 由上式可知,要使光电子逸出阴极表面的必要条件是hv>w 。由于不同材料具有不同的逸出功,因此对每一种阴极材料,入射光都有一个确定的频率限,当入射光的频率低于此频率限时,不论光强多大,都不会产生光电子发射,此频率 限称为“红限”。相应的波长为 式中,c 为光速,w 为逸出功。 2.内光电效应 当光照射到半导体表面时,由于半导体中的电子吸收了光子的能量,使电子从半导体表面逸出至周围空间的现象叫外光电效应。利用这种现象可以制成阴极射线管、光电倍增管和摄像管的光阴极等。半导体材料的价带与导带间有一个带隙,其能量间隔为Eg 。一般情况下,价带中的电子不会自发地跃迁到导带,所以半导体 w hv -=2mv 2 1 w hc K = λ
一、传感器地特性 ()传感器地动态性.动特性是指传感器对随时间变化地输入量地响应特性.动态特性输入信号变化时,输出信号随时间变化而相应地变化,这个过程称为响应.传感器地动态特性是指传感器对随时间变化地输入量地响应特性.动态特性好地传感器,当输入信号是随时间变化地动态信号时,传感器能及时精确地跟踪输入信号,按照输入信号地变化规律输出信号.当传感器输入信号地变化缓慢时,是容易跟踪地,但随着输入信号地变化加快,传感器地及时跟踪性能会逐渐下降.通常要求传感器不仅能精确地显示被测量地大小,而且还能复现被测量随时间变化地规律,这也是传感器地重要特性之一.文档来自于网络搜索()传感器地线性度.通常情况下,传感器地实际静态特性输出是条曲线而非直线.在实际工作中,为使仪表具有均匀刻度地读数,常用一条拟合直线近似地代表实际地特性曲线、线性度(非线性误差)就是这个近似程度地一个性能指标.拟合直线地选取有多种方法.如将零输入和满量程输出点相连地理论直线作为拟合直线;或将与特性曲线上各点偏差地平方和为最小地理论直线作为拟合直线,此拟合直线称为最小二乘法拟合直线.文档来自于网络搜索()传感器地灵敏度.灵敏度是指传感器在稳态工作情况下输出量变化△对输入量变化△地比值.它是输出一输入特性曲线地斜率.如果传感器地输出和输入之间显线性关系,则灵敏度是一个常数.否则,它将随输入量地变化而变化.灵敏度地量纲是输出、输入量地量纲之比.例如,某位移传感器,在位移变化时,输出电压变化为,则其灵敏度应表示为.当传感器地输出、输入量地量纲相同时,灵敏度可理解为放大倍数.文档来自于网络搜索()传感器地稳定性.稳定性表示传感器在一个较长地时间内保持其性能参数地能力.理想地情况是不论什么时候,传感器地特性参数都不随时间变化.但实际上,随着时间地推移,大多数传感器地特性会发生改变.这是因为敏感器件或构成传感器地部件,其特性会随时间发生变化,从而影响传感器地稳定性.文档来自于网络搜索 ()传感器地分辨力.分辨力是指传感器可能感受到地被测量地最小变化地能力.也就是说,如果输入量从某一非零值缓慢地变化.当输入变化值未超过某一数值时,传感器地输出不会发生变化,即传感器对此输入量地变化是分辨不出来地.只有当输入量地变化超过分辨力时,其输出才会发生变化.通常传感器在满量程范围内各点地分辨力并不相同,因此常用满量程中能使输出量产生阶跃变化地输入量中地最大变化值作为衡量分辨力地指标.上述指标若用满量程地百分比表示,则称为分辨率.文档来自于网络搜索 ()传感器地迟滞性.迟滞特性表征传感器在正向(输入量增大)和反向(输入量减小)行程间输出输入特性曲线不一致地程度,通常用这两条曲线之间地最大差值△与满量程输出·地百分比表示.迟滞可由传感器内部元件存在能量地吸收造成.文档来自于网络搜索()传感器地重复性.重复性是指传感器在输入量按同一方向作全量程连续多次变动时所得特性曲线不一致地程度.各条特性曲线越靠近,说明重复性越好,随机误差就越小.如图所示为输出特性曲线地重复特性,正行程地最大重复性偏差为.反行程地最大重复性偏差为.取这两个最大偏差中地较大者为,再以其占满量程输出地百分数表示,就是重复误差,即一士×()重复性是反映传感器精密程度地重要指标.同时,重复性地好坏也与许多随机因素有关,它属于随机误差,要用统计规律来确定.文档来自于网络搜索 二、常见地传感器种类 .电阻式传感器 电阻式传感器是将被测量,如位移、形变、力、加速度、湿度、温度等这些物理量转换式成电阻值这样地一种器件.主要有电阻应变式、压阻式、热电阻、热敏、气敏、湿敏等电阻式传感器件.文档来自于网络搜索 .变频功率传感器 变频功率传感器通过对输入地电压、电流信号进行交流采样,再将采样值通过电缆、光
基于等截面矩形悬臂梁光纤光柵传感器性能分析与研究 光纤布拉格光栅(fiber Bragg gratings,FBG)传感技术由于可以实现长距离、多参量、大范围组网以及实时监测,因而广泛应用于军事、工业、农业等领域中。为应对现代社会高新技术的快速发展需求,需要不断地设计出新的传感器结构, 开发新的传感方式,提升传感器性能并拓展应用领域。在大多数实际应用中FBG 长度范围内的应变是非均匀分布的,严重影响了传感器的性能甚至使传感器失效,限制了 FBG传感器的应用。因此研究基于非均匀应变分布下的FBG传感特性、 传感结构和传感方式是有意义的。 在深入研究学习了 FBG传感技术研究现状与传感原理的基础上,本文开展 了基于等截面矩形悬臂梁FBG传感器的传感性能分析与研究工作。首先得到了表面式FBG传感器的应变传递率表达式,模拟仿真详细地分析了各个物理参量与应变传递率的变化关系。进一步仿真分析了中间层尺寸对平均传递率的影响,指出了封装中应尽量增大长度和宽度以减小厚度的影响,以提高封装结果的重复性和一致性。为封装工艺的改进指明方向,并为应变传递误差的修正提供了理论基础。 然后利用激光切割技术结合等截面矩形悬臂梁构建了非均匀应变分布,测试分析了均匀FBG和切趾FBG在非均匀应变分布中的传感特性与不足。提出了基于双均匀FBG光谱带宽传感的位移传感器,解决了单个均匀FBG反射光谱带宽在任意非均匀应变分布下传感线性度较差和灵敏度较低的问题。设计并实现了三种敷设位置不同的FBG位移传感器,实验测量证明了双均匀FBG光谱带宽传感的方式在多种非均匀应变分布场中的有效性,改善了传感线性度,提高了传感灵敏度。接着提出了基于不同非均匀应变分布的切趾FBG中心波长编码方式的位移传感器,分析了不同应变放大结构对传感器灵敏度的影响。 研究了切趾FBG长度范围内非均匀应变分布的变化规律,利用平均应变的变化关系计算了传感器的灵敏度和灵敏度增强因子。通过测量得到了与理论预测较为一致的增强因子,提高了基于等截面矩形悬臂梁FBG传感器的灵敏度。最后对模拟退火算法进行了改进,提出了基于模拟退火算法的应变分布重构技术,通过 仿真实验证明了 FBG应变分布重构算法的可行性与有效性,算法仿真实现了线 性非均匀应变分布重构。
光电传感器特性分析 摘要:随着科技的发展,人类越来越注重信息和自动化,在日常的生产学习过程中,人们常常要进行自动筛选、自动传送,而为了实现这些,光电传感发挥了不可磨灭的作用。光敏传感器的物理基础是光电效应,即光敏材料的电学特性因受到光的照射而发生变化。 关键词:光电效应、光电传感器、光敏材料 一、理论基础——光电效应 光电效应通常分为外光电效应和内光电效应两大类。外光电效应是指在光照射下,电子逸出物体表面的外发射的现象,也称光电发射效应,基于这种效应的光电器件有光电管、光电倍增管等。内光电效应是指入射的光强改变物质导电率的物理现象,称为光电导效应,大多数光电控制应用的传感器,如光敏电阻、光敏二极管、光敏三极管、硅光电池等都属于内光电效应类传感器。 1.外光电效应 光照在照在光电材料上,材料表面的电子吸收的能量,若电子吸收的能量足够大,电子会克服束缚逸出表面,从而改变光电子材料的导电性,这种现象成为外光电效应。 根据爱因斯坦的光电子效应,光子是运动着的粒子流,每种光子的能量为hv(v为光波频率,h为普朗克常数),由此可见不同频率的光子具有不同的能量,光波频率越高,光子能量越大。假设光子的全部能量交给光子,电子能量将会增加,增加的能量一部分用于克服正
离子的束缚,另一部分转换成电子能量。根据能量守恒定律: 式中,m 为电子质量,v 为电子逸出的初速度,w 为逸出功。 由上式可知,要使光电子逸出阴极表面的必要条件是hv>w 。由于不同材料具有不同的逸出功,因此对每一种阴极材料,入射光都有一个确定的频率限,当入射光的频率低于此频率限时,不论光强多大, 都不会产生光电子发射,此频率限称为“红限”。相应的波长为 式中,c 为光速,w 为逸出功。 2.内光电效应 当光照射到半导体表面时,由于半导体中的电子吸收了光子的能量,使电子从半导体表面逸出至周围空间的现象叫外光电效应。利用这种现象可以制成阴极射线管、光电倍增管和摄像管的光阴极等。半导体材料的价带与导带间有一个带隙,其能量间隔为Eg 。一般情况下,价带中的电子不会自发地跃迁到导带,所以半导体材料的导电性远不 如导体。但如果通过某种方式给价带中的电子提供能量,就可以将其 激发到导带中,形成载流子,增加导电性。光照就是一种激励方式。当入射光的能量hν≥Eg( Eg 为带隙间隔)时,价带中的电子就会吸收 光子的能量,跃迁到导带,而在价带中留下一个空穴,形成一对可以导电的电子——空穴对。这里的电子并未逸出形成光电子,但显然存在着由于光照而产生的电效应。因此,这种光电效应就是一种内光电效应。从理论和实验结果分析,要使价带中的电子跃迁到导带,也存在一 w hv -=2mv 21 w hc K = λ
课程小论文 题目:光电传感器性能参数分析 院 (部) 专业 学生姓名 学生学号 指导教师 课程名称 课程代码 课程学分 起始日期
光电传感器性能参数分析 摘要:在科学技术高速发展的现代社会中,人类已经入瞬息万变的信息时代,人们在日常生活,生产过程中,主要依靠检测技术对信息经获取、筛选和传输,来实现制动控制,自动调节,目前我国已将检测技术列入优先发展的科学技术之一。由于微电子技术,光电半导体技术,光导纤维技术以及光栅技术的发展,使得光电传感器的应用与日俱增。这种传感器具有结构简单、非接触、高可靠性、高精度、可测参数多、反应快以及结构简单,形式灵活多样等优点,在自动检测技术中得到了广泛应用,它一种是以光电效应为理论基础,由光电材料构成的器件。 关键字:光电效应、光电元件、光电特性、传感器分类、传感器应用
目录 目录 (3) 1、引言 (4) 2、光电传感器 (4) 3、光电效应 (6) 4、光电传感器的前景 (6) 5、总结 (7) 参考文献 (8)
一、引言 随着工业生产技术的发展,对生产过程中的过程控制要求越来越高,而作为控制系统的核心之一,传感器越来越受工业技术人员的重视。人们对高性能检测技术的发展需求与日俱增。其中非电量测量的受欢迎程度最为广泛,可将距离、位移、振动等信号转换为电信号,并通过这些方法获得被测物体的状态。非电量检测技术分为接触式与非接触式检测。在工业生产环境中,有些场合不适用接触式检测,因为传感器与被测物体的接触,在工业现场环境中会造成被测体损伤、传感器磨损等问题。因此,需要性能良好的非接触式传感器以满足工业需求,相关技术的研究也成为传感器检测技术的发展方向。 光电检测技术作为目前检测技术之一,目前国内对于光电检测的研究已有一些成果,但目前产品还存在着一些问题,例如线性测量范围过短、对现场装配条件要求较高等,距离满足工业现场的要求还存在一定距离。所以,为了解决这些问题,光电效应对传感器性能的影响是很重要的研究方向之一,可以使光电传感器应用在更多的领域,推动光电检测技术的发展。 二、光电传感器 光电传感器是通过把光强度的变化转换成电信号的变化来实现控制的,它的基本结构如下图,它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电传感器一般由光源,光学通路和光电元件三部分组成.光电检测方法具有精度高,反应快,非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,光电式传感器在检测和控制中应用非常广泛。 图1光电传感器原理图 光电传感器一般由三部分构成,它们分为:发送器、接收器和检测电路,发送器对准目标发射光束,发射的光束一般来源于半导体光源,发光二极管(LED)、激光二极管及红外发射二极管。光束不间断地发射,或者改变脉冲宽度。接收器有光电二极管、光电三极管、光电池组成。在接收器的前面,装有光学元件如透镜和光圈等。在其后面是检测电路,它能滤出有效信号和应用该信号。 光电传感器是一种依靠被测物与光电元件和光源之间的关系,来达到测量目的
全球传感器市场分析 2008年全球传感器市场容量为506亿美元,预计2010年全球传感器市场可 达600亿美元以上。调查显示,东欧、亚太区和加拿大成为传感器市场增长最快的地区,而美国、德国、日本依旧是传感器市场分布最大的地区。就世界范围而言,传感器市场上增长最快的依旧是汽车市场,占第二位的是过程控制市场,看好通讯市场前景。 一些传感器市场比如压力传感器、温度传感器、流量传感器、水平传感器已表现出成熟市场的特征。流量传感器、压力传感器、温度传感器的市场规模最大,分别占到整个传感器市场的21%、19%和14%。传感器市场的主要增长来自于无线传感器、MEMS(Micro-Electro-MechanicalSystems,微机电系统)传感器、生物传感器等新兴传感器。其中,无线传感器在2007-2010 年复合年增长率预计会超过25%。 目前,全球的传感器市场在不断变化的创新之中呈现出快速增长的趋势。有关专家指出,传感器领域的主要技术将在现有基础上予以延伸和提高,各国将竞相加速新一代传感器的开发和产业化,竞争也将日益激烈。新技术的发展将重新定义未来的传感器市场,比如无线传感器、光纤传感器、智能传感器和金属氧化传感器等新型传感器的出现与市场份额的扩大。 中国传感器市场稳中有升后续发展被看好 传感器作为现代科技的前沿技术,被认为是现代信息技术的三大支柱之一,也是国内外公认的最具有发展 前途的高技术产业。在国内有自动化方面的专家指出塑料工业网,传感器技术直接关系到我国自动化产业 的发展形势,认为“传感器技术强,则自动化产业强”。由此可见传感器技术对自动化产业乃至整个国家 工业建设的重要性。 尽管受到金融风暴的影响,但工业及信息化部2008年1-9月的数据统计依旧显示,我国的传感器市场 呈现出逆势增长的态势。而最近几年,中国的传感器年度销售平均增长也达到了39%。近年来,世界传感 器市场也在以持续稳定的增长之势向前发展,Intechno咨询公司估计全球的3000多家传感器制造商在2008 年的总销售额将超过500亿美元,而到2010年将增长到600亿美元以上,这对于传感器厂商来说意味着巨 大的商业机遇。 市场竞争将更加激烈 世界传感器市场依然保持着稳步发展的态势,1998年到2003年之间的年平均增长率为5.3%。根据相 关部门的调查,2005年到2008年的年平均增长率略为下降,减去传感器成本的下降及一些尚不可知的新 兴应用领域的出现,可达4.5%。
光电式传感器 1.概述 光电传感器是采用光电元件作为检测元件的传感器。它首先把被测量的变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光电传感器一般由光源、光学通路和光电元件三部分组成。光电检测方法具有精度高、反应快、非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,光电式传感器在检测和控制中应用非常广泛。光电传感器是各种光电检测系统中实现光电转换的关键元件,它是把光信号(红外、可见及紫外光辐射)转变成为电信号的器件。 光电式传感器是以光电器件作为转换元件的传感器。它可用于检测直接引起光量变化的非电量,如光强、光照度、辐射测温、气体成分分析等;也可用来检测能转换成光量变化的其他非电量,如零件直径、表面粗糙度、应变、位移、振动、速度、加速度,以及物体的形状、工作状态的识别等。光电式传感器具有非接触、响应快、性能可靠等特点,因此在工业自动化装置和机器人中获得广泛应用。近年来,新的光电器件不断涌现,特别是CCD图像传感器的诞生,为光电传感器的进一步应用开创了新的一页。 2.物理特性 2.1外光电效应 2.1.1光子假设 1887年,赫兹发现光电效应,爱因斯坦第一个成功解释光电效应。爱因斯坦根据普朗克量子假说而进一步提出的光量子,即光子概念,对光电效应研究做出了决定性的贡献。爱因斯坦光子假说的核心思想是:表面上看起来连续的光波是量子化的。单色光由大量不连续的光子组成。若单色光频率为n,那么每个 光子的能量为E=hv, 动量为。 由爱因斯坦光子假说发展成现代光子论(photon theory)的两个基本点是:
(1) 光是由一颗一颗的光子组成的光子流。每个光子的能量为E = hv,动量 为。由N个光子组成的光子流,能量为N hv。 (2) 光与物质相互作用,即是每个光子与物质中的微观粒子相互作用。 根据能量守恒定律,约束得最不紧的电子在离开金属面时具有最大的初动 能,所以对于电子应有: 2.2 内光电效应 光电传感器通常是指能敏感到由紫外线到红外线光的光能量,并能将光能转化成电信号的器件。其工作原理是基于一些物质的光电效应。 光电效应:当具有一定能量E的光子投射到某些物质的表面时,具有辐射能量的微粒将透过受光的表面层,赋予这些物质的电子以附加能量,或者改变物质的电阻大小,或者使其产生电动势,导致与其相连接的闭合回路中电流的变化,从而实现了光—电转换过程。在光线作用下能使物体电阻率改变的称为内光电效应。属于内光电效应的光电转换元件有光敏电阻以及由光敏电阻制成的光导管等。 2.2.1光电导效应 光照变化引起半导体材料电导变化的现象称光电导效应(又称为光电效应、光敏效应),即光电导效应是光照射到某些物体上后,引起其电性能变化的一类光致电改变现象的总称。当光照射到半导体材料时,材料吸收光子的能量,使非传导态电子变为传导态电子,引起载流子浓度增大,因而导致材料电导率增大。在光线作用下,对于半导体材料吸收了入射光子能量,若光子能量大于或等于半导体材料的禁带宽度,就激发出电子-空穴对,使载流子浓度增加,半导体的导电性增加,阻值减低,这种现象称为光电导效应。光敏电阻就是基于这种效应的光电器件。