STM32教学实验箱硬件概要
1.电源设置
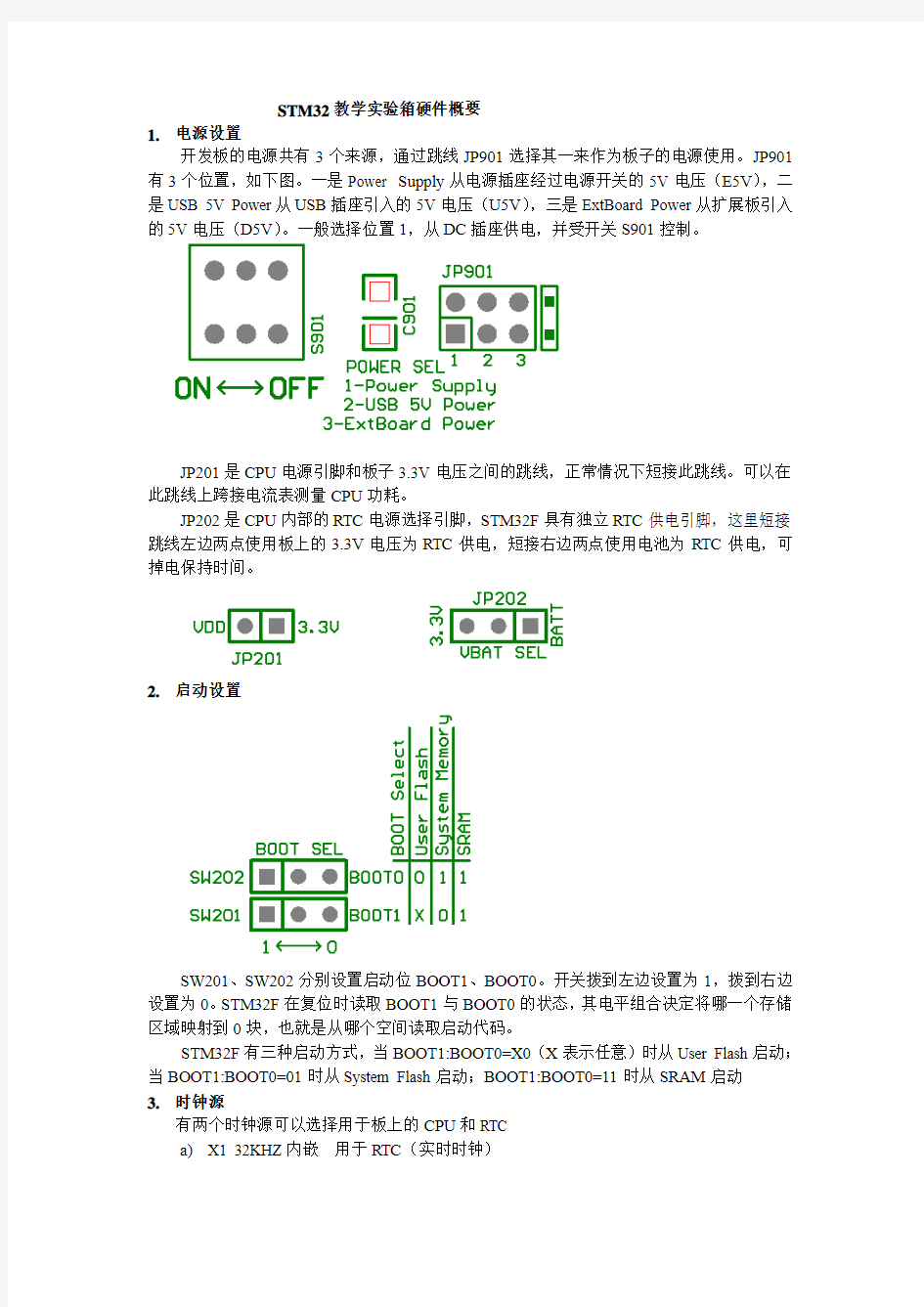
开发板的电源共有3个来源,通过跳线JP901选择其一来作为板子的电源使用。JP901有3个位置,如下图。一是Power Supply从电源插座经过电源开关的5V电压(E5V),二是USB 5V Power从USB插座引入的5V电压(U5V),三是ExtBoard Power从扩展板引入的5V电压(D5V)。一般选择位置1,从DC插座供电,并受开关S901控制。
JP201是CPU电源引脚和板子3.3V电压之间的跳线,正常情况下短接此跳线。可以在此跳线上跨接电流表测量CPU功耗。
JP202是CPU内部的RTC电源选择引脚,STM32F具有独立RTC供电引脚,这里短接跳线左边两点使用板上的3.3V电压为RTC供电,短接右边两点使用电池为RTC供电,可掉电保持时间。
2.启动设置
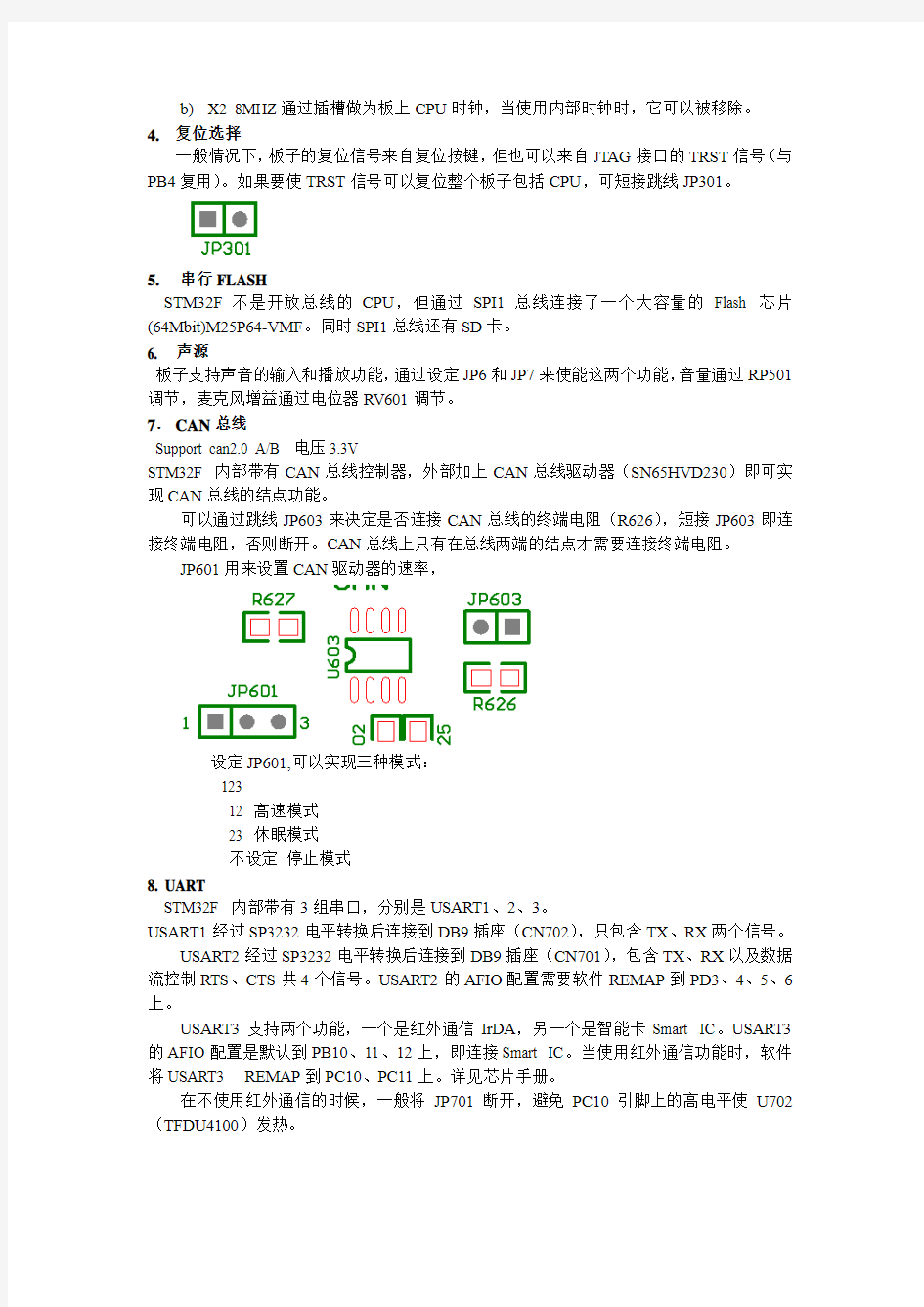
SW201、SW202分别设置启动位BOOT1、BOOT0。开关拨到左边设置为1,拨到右边设置为0。STM32F在复位时读取BOOT1与BOOT0的状态,其电平组合决定将哪一个存储区域映射到0块,也就是从哪个空间读取启动代码。
STM32F有三种启动方式,当BOOT1:BOOT0=X0(X表示任意)时从User Flash启动;当BOOT1:BOOT0=01时从System Flash启动;BOOT1:BOOT0=11时从SRAM启动
3.时钟源
有两个时钟源可以选择用于板上的CPU和RTC
a)X1 32KHZ内嵌用于RTC(实时时钟)
b)X2 8MHZ通过插槽做为板上CPU时钟,当使用内部时钟时,它可以被移除。
4.复位选择
一般情况下,板子的复位信号来自复位按键,但也可以来自JTAG接口的TRST信号(与PB4复用)。如果要使TRST信号可以复位整个板子包括CPU,可短接跳线JP301。
5.串行FLASH
STM32F不是开放总线的CPU,但通过SPI1总线连接了一个大容量的Flash 芯片(64Mbit)M25P64-VMF。同时SPI1总线还有SD卡。
6. 声源
板子支持声音的输入和播放功能,通过设定JP6和JP7来使能这两个功能,音量通过RP501调节,麦克风增益通过电位器RV601调节。
7.CAN总线
Support can2.0 A/B 电压3.3V
STM32F 内部带有CAN总线控制器,外部加上CAN总线驱动器(SN65HVD230)即可实现CAN总线的结点功能。
可以通过跳线JP603来决定是否连接CAN总线的终端电阻(R626),短接JP603即连接终端电阻,否则断开。CAN总线上只有在总线两端的结点才需要连接终端电阻。
JP601用来设置CAN驱动器的速率,
设定JP601,可以实现三种模式:
123
12 高速模式
23 休眠模式
不设定停止模式
8. UART
STM32F 内部带有3组串口,分别是USART1、2、3。
USART1经过SP3232电平转换后连接到DB9插座(CN702),只包含TX、RX两个信号。
USART2经过SP3232电平转换后连接到DB9插座(CN701),包含TX、RX以及数据流控制RTS、CTS共4个信号。USART2的AFIO配置需要软件REMAP到PD3、4、5、6上。
USART3支持两个功能,一个是红外通信IrDA,另一个是智能卡Smart IC。USART3的AFIO配置是默认到PB10、11、12上,即连接Smart IC。当使用红外通信功能时,软件将USART3 REMAP到PC10、PC11上。详见芯片手册。
在不使用红外通信的时候,一般将JP701断开,避免PC10引脚上的高电平使U702(TFDU4100)发热。
9.电机控制motor control
通过cn1001(34 pin)连接,它提供了所有的请求控制和反馈信号,来自或输出到一个电机驱动板。
连接中的有效信号:紧急停止、电机速度、三相电机电流、母线电压、来自电动机驱动板散热器温度、6通道脉冲调制控制信号到电机驱动电路。
专用的电机采样操作通过设定来使能
Jp8 短接使能采样(pd2和pb0连接),断开即断开PD2和PB0,这样他们能够被子板使用。
默认短接
JP12 当来自CN1001的31脚是数字编码信号时,它是断开的
当来自CN1001的31脚是模拟信号时,它是短接的
10. 智能卡
板子智能卡驱动ST8024,用于异步3V和5V的智能卡。他完成了所有的电源保护和控制功能通过和CPU相关引脚连接。
5V/3V 智能卡电源选择PD11
I/OUC MCU 数据I/O线PB10
XTAL1 晶振或外部时钟输入PB12
OFF 检测卡存在,中断到MCU PE14
RSTIN 卡的复位输入从MCU PB11
CMDVCC 开始激活时序输入PE7
11. MICROSD CARD
64M或者128M的microsd 卡,连接到板上的spi1(和串行flash共享),通过pc12进行片选。
12. 传感器
STM32F 内部带有温度传感器,但开发板有配置一片温度传感器芯片,通过IIC总线和CPU连接。电路中有从3.3V到5V的电平转换功能。
13. 模拟输入
板子上配置一个外部模拟电压输入接口CN601。和一个分压电位器RV601,可以调节产生一个连续电压。
14. 红外线
看8 uart部分
15. USB
STM32F具有USB从口,电路中可通过软件来控制USB_DP信号线的上拉电阻是否接通。跳线JP602选择1-2时,USB_DP信号线的上拉电阻固定接通;选择2-3时,软件可通过PD9的电平来控制USB_DP信号线的上拉电阻是否接通,0接通,1断开。
如果USB_DP信号线的上拉电阻断开,即使通过USB电缆连接PC机和板子,PC机也不会认为有从设备接入。可在不断线的情况下,控制板子(USB从设备)脱机或联机。16.显示和输入
板子配置一块TFT液晶屏,型号是AM240320L8TNQW-00H。板子配置一个五位开关,即四个方向及选择。另外还有Tamper Button、Wakeup Button、User Button三个独立按键。
第1章计算机组成与体系结构 根据考试大纲,本章内容要求考生掌握3个知识点。 (1)构成计算机的各类部件的功能及其相互关系; (2)各种体系结构的特点与应用(SMP、MPP); (3)计算机体系结构的发展。 1.1 计算机体系结构的发展 冯·诺依曼等人于1946年提出了一个完整的现代计算机雏形,它由运算器、控制器、存储器和输入/输出设备组成。现代的计算机系统结构与冯·诺依曼等人当时提出的计算机系统结构相比,已发生了重大变化,虽然就其结构原理来说,占有主流地位的仍是以存储程序原理为基础的冯·诺依曼型计算机,但是,计算机系统结构有了许多改进,主要包括以下几个方面。 (1)计算机系统结构从基于串行算法改变为适应并行算法,从而出现了向量计算机、并行计算机、多处理机等。 (2)高级语言与机器语言的语义距离缩小,从而出现了面向高级语言机器和执行高级语言机器。 (3)硬件子系统与操作系统和数据库管理系统软件相适应,从而出现了面向对象操作系统机器和数据库计算机等。 (4)计算机系统结构从传统的指令驱动型改变为数据驱动型和需求驱动型,从而出现了数据流计算机和归约机。 (5)为了适应特定应用环境而出现了各种专用计算机。 (6)为了获得高可靠性而研制容错计算机。 (7)计算机系统功能分散化、专业化,从而出现了各种功能分布计算机,这类计算机包括外围处理机、通信处理机等。 (8)出现了与大规模、超大规模集成电路相适应的计算机系统结构。 (9)出现了处理非数值化信息的智能计算机。例如自然语言、声音、图形和图像处理等。 1.2 构成计算机的各类部件的功能及其相互关系 计算机由控制器、运算器、存储器、输入设备和输出设备组成。
[模拟] 计算机原理与体系结构 选择题 第1题: 中断响应时间是指(1) 。 A.从中断处理开始到中断处理结束所用的时间 B.从发出中断请求到中断处理结束后所用的时间 C.从发出中断请求到进入中断处理所用的时间 D.从中断处理结束到再次中断请求的时间 参考答案:C 第2题: A.13 B.183 C.193 D.203 参考答案:D 第3题: 在单指令流多数据流计算机(SIMD)中,各处理单元必(3) 。 A.以同步方式,在同一时间内执行不同的指令 B.以同步方式,在同一时间内执行同一条指令 C.以异步方式,在同一时间内执行不同的指令 D.以异步方式,在同一时间内执行同一条指令 参考答案:B 在计算机中,最适合进行数字加减运算的数字编码是(4) ,最适合表示浮点数阶码的数字编码是(5) 。 第4题: A.原码 B.反码 C.补码 D.移码
参考答案:C 第5题: A.原码 B.反码 C.补码 D.移码 参考答案:D 操作数所处的位置,可以决定指令的寻址方式。操作数包含在指令中,寻址方式为(6) ;操作数在寄存器中,寻址方式为(7) ;操作数的地址在寄存器中,寻址方式为(8) 。 第6题: A.立即寻址 B.直接寻址 C.寄存器寻址 D.寄存器间接寻址 参考答案:A 第7题: A.立即寻址 B.相对寻址 C.寄存器寻址 D.寄存器间接寻址 参考答案:C 第8题: A.相对寻址 B.直接寻址 C.寄存器寻址 D.寄存器间接寻址
参考答案:D 第9题: 两个同符号的数相加或异符号的数相减,所得结果的符号位SF和进位标志CF 进行(9) 运算为1时,表示运算的结果产生溢出。 A.与 B.或 C.与非 D.异或 参考答案:D 第10题: 若浮点数的阶码用移码表示,尾数用补码表示。两规格化浮点数相乘,最后对结果规格化时,右规的右移位数最多为(10) 位。 A.1 B.2 C.尾数位数 D.尾数位数-1 参考答案:A 第11题: A.10/70△t
STM32F103xx系列单片机介绍 STM32F103xx增强型系列由意法半导体集团设计,使用高性能的ARMCortex-M332位的RISC 内核,工作频率为72MHz,内置高速存储器(高达128K字节的闪存和20K字节的SRAM),丰富的增强I/O端口和联接到两条APB总线的外设。所有型号的器件都包含2个12位的ADC、3个通用16位定时器和一个PWM定时器,还包含标准和先进的通信接口:多达2个I2C和SPI、3个USART、一个USB和一个CAN。 1、结构与功能 ■内核:ARM32位的Cortex?-M3CPU ?72MHz,1.25DMips/MHz(Dhrystone2.1),0等待周期的存储器 ?支持单周期乘法和硬件除法 ■存储器 ?从32K字节至512K字节的闪存程序存储器(STM32F103xx中的第二个x表示FLASH容量,其中:“4”=16K,“6”=32K,“8”=64K,B=128K,C=256K,D=384K,E=512K) ?从6K字节至64K字节的SRAM ■时钟、复位和电源管理 ?2.0至3.6伏供电和I/O管脚 ?上电/断电复位(POR/PDR)、可编程电压监测器(PVD) ?内嵌4至16MHz高速晶体振荡器 ?内嵌经出厂调校的8MHz的RC振荡器 ?内嵌40kHz的RC振荡器 ?PLL供应CPU时钟 ?带校准功能的32kHzRTC振荡器 ■低功耗 ?睡眠、停机和待机模式 ?VBAT为RTC和后备寄存器供电 ■2个12位模数转换器,1us转换时间(16通道) ?转换范围:0至3.6V ?双采样和保持功能 ?温度传感器 ■DMA ?7通道DMA控制器 ?支持的外设:定时器、ADC、SPI、I2C和USART ■多达80个快速I/O口 ?26/37/51/80个多功能双向5V兼容的I/O口 ?所有I/O口可以映像到16个外部中断
四川师范大学成都学院通信工程学院 基于STM32的简易电子计算器设计与实现---实验综合设计报告 学生姓名陶龑 学号2016301033 所在学院通信工程学院 专业名称嵌入式系统课程设计 班级2014级软件班 指导教师刘强 成绩 四川师范大学成都学院 二○一六年十一月
基于STM32的简易电子计算器设计与实现内容摘要:电子计算器即将传统意义上的计算器进行电子化和数字化,为其减少时间误差和体积,并提供更多的扩展实用功能,从而使电子计算器的应用更加广泛。在经过资料的查找与收集后,本论文以该理念设计了一款基于STM32芯片作为核心控制器,使用Keil5平台,以C语言为基础进行软件编程的简易电子计算器,其内在TFT-LCD液晶屏进行输出,以四个按键进行输入,从而实现显示输入数据以及加减乘除运算的基本功能。 通过软件程序的编写、硬件电路原理的实现、电子计算器正常工作的流程、原理图仿真实现、硬件实物的安装制作与硬件实物的调试过程,该简易电子计算器现可用于日常生活和工作中。 关键词:简易电子计算器STM32 C语言Keil5
Design and implementation of Multi Function Electronic Clock based on STM32 Abstract: The traditional electronic calculator calculator for electronic and digital, to reduce the time error and volume, and provide more extended utility function, so that the more extensive application of electronic calculators. After searching and collecting data, in this paper, the concept of a design based on STM32 chip as the core controller, using Keil5 platform, simple electronic calculator based on C language software programming, the TFT-LCD LCD screen for input and output, with four keys, so as to realize the display of input data and the basic the function of add, subtract, multiply and divide operations. Through the software program, hardware circuit principle of the electronic calculator realization, normal work process and the principle of graph simulation, hardware installation and hardware debugging process, the simple electronic calculator is used in daily life and work. Key words: Simple electronic calculator STM32 language C Keil5
第二章常规计算机硬件体系结构 早期的包处理系统是建立在常规计算机系统之上的,这也是最廉价的包处理系统。我们定义一个常规的计算机系统由四个基本部件组成:一个CPU,一个内存,一个或多个I/O设备,一条总线。总线连接另外的三个基本部件,并允许它们相互通信。PC机是一个常规计算机系统,因为它包括了以上所有四个部件。 为了将一台常规的计算机转换成一个可以处理数据包的网络系统,必须在计算机上增加一些硬件和软件。增加的硬件用来发送和接收数据包,增加的软件用来处理数据包。 2.1 早期的NIC 将一个计算机系统连接到一个网络的硬件设备称为网络接口卡(Network Interface Card,NIC)。对于计算机来说,NIC和其它I/O设备一样连接到计算机的总线并由CPU控制,CPU 控制NIC的方法与控制其它I/O设备的方法也相同。对于网络来说,NIC表现得像一台主机,即NIC可以发送和接收数据包。 主机和包分析器只连接到一个网络上,这样的系统只需要一块NIC。复杂一些的系统,像网桥、路由器等,要求多个网络连接。当系统需要多个网络连接时,有两种可能的实现方法。一种方法是将多块网卡插入到总线扩展槽中,每块网卡连接一个网络;另一种方法是在一块电路板上提供多个独立的网络接口,电路板插入扩展槽中,每个网络接口连接一个网络,目前已经出现了这种商用的NIC硬件。从计算机的角度来看,这两种方法没有什么区别。但是由于总线扩展槽的数量是有限的,因此后一种方法更好,可以节省扩展槽。 网络接口由CPU操作,这意味着CPU控制着所有数据包的发送和接收。为发送一个数据包,CPU首先在内存中组装好数据包,然后将包传递给NIC,NIC再将数据包发送到网络上。在系统接收一个数据包前,CPU必须先允许NIC,指明数据包存放的位置。NIC等待从网络上到来的数据包,将其存放到指定的位置,然后通知CPU。NIC中通常包含实现物理层协议标准的物理接口芯片组,它们保证每个输出的帧具有正确的格式并且产生出符合物理层协议标准的信号波形;类似地,它们检查每个到来的帧以保证每个帧是有效的。 数据总线上一次可以传输的数据量由数据总线的宽度(即数据线的数目)决定。一般来说,数据总线的宽度不足以一次传输一个完整的帧,因此一个帧必须分成许多较小的片段(如32比特)分多次传递给NIC。由于NIC是由CPU操作的,这意味着CPU必须参与到这种传输过程中。事实上,早期的NIC硬件依赖于计算机系统的CPU完成帧的收发。在帧的接收过程中,CPU反复地访问NIC取得下一个片段的数据,然后存放到内存中。在帧的发送过程中,CPU反复地将帧的片段发送给NIC。使用CPU传输数据包的主要优点是代价低,因为NIC硬件不需要做很多事,因此可以做得很简单。主要的缺点是开销大和可扩展性差,使用CPU处理输入输出意味着它不能做别的事;更重要的是,一个CPU无法适应高速网络,特别是当系统有多个网络接口时。 2.2 现代的NIC 为了支持多个网络接口和适应高速网络,必须将输入/输出和包处理分离开来,并尽可能避免使用CPU,因此现代的NIC都包含独立于CPU操作的复杂硬件。以下四种技术用来优化数据传输和减少开销:(1)卡上地址识别和过滤;(2)卡上包缓存;(3)直接内存访问DMA;(4)操作链。 (1)卡上地址识别和过滤 以太网使用共享媒体进行传输,每个节点实际上可以收到所有的帧,只是丢弃哪些不是
1.*嵌入式系统:以计算机技术为基础,以应用为中心,软件硬件可剪裁,适合应用系统对功能可靠性、成本、体积、功耗严格要求的专业计算机系统。 2.*嵌入式系统与传统系统等所区分的三个特征:微处理器通常由32位以上的RISC组成;软件通常是以嵌入式操作系统为核心,外加用户应用程序;具有明显的可嵌入性。 3.*嵌入式系统的应用:智能消费电子中;工业控制中;医疗设备中;信息家电及家庭智能管理系统;网络与通信系统中;环境工程;机器人。 4.*ARM定义的三大分工明确的系列:“A”系列面向尖端的基于虚拟内存的操作系统和用户应用(针对日益增长的运行包括linux、Windows、CE和Android在内的消费电子和无线产品);“R”系列针对实时系统(针对需要运行实时操作系统来惊醒控制应用的系统,包括汽车电子、网络和影像系统);“M”系列对胃控制器和点成本应用提供优化(针对开发费用低功耗低,同时针对性能要求不断增加的嵌入式应用而设计,如汽车车身控制系统和各种大型家电)。 5.ARM Cortex处理器系列是基于ARMv7构架的产品,既有ARM Cortex-M系列,也有高性能的A系列。 6.NEON技术是64/128位SIMD指令集,用于新一代媒体和信号处理应用加速。NEON支持8位,16位,32位,64位整数及单精度浮点SIMD操作,以进行音频,视频、图像和游戏的处理。 7.ARM Cortex-M3处理器的特点:性能丰富成本低,低功耗,可配置性能强,丰富的链接。 8.*STM32F10x处理器分为:101,102,103,105,107。 9.*STM32的总线速度:USB接口速度12Mb/s;USART接口速度4.5Mb/s;SPI接口速度可达18Mb/s;IC接口速度400kHz。 10.STM32系列处理器的优点:先进的内部结构;三种功耗控制;最大程度集成整合;出众及创新的外设。 11.STM32F10x按性能分为:基本型STM32F101,USB基本型STM32F102,增强型STM32F103,互联网型STM32F105、STM32F107系列。 12.STM32F103RBT6系列的命名规则:R-引脚数量、B-Flash大小、T-封装、6-工作温度。 13.*STM32F103按照引脚功能分为:电源、复位、时钟控制、启动配置、输入输出口。 14.STM32F103总线系统包括:驱动单元、被动单元、总线矩阵。 15.最小系统是指仅包含必须的元器件、仅可运行最基本软件的基本系统。 16.典型的最小系统包括:微控制器芯片、供电电路、时钟电路、复位电路、启动配置电路和程序下载电路。 第三章 1.STM32标准库命名则:PPP_Init:根据PPP_InitTypeDef中指定的参数初始化外设ppp; PPP_DeInit:将外设PPP寄存器重设为缺省值; PPP_StructInit:将PPP_InitTypeDef结构中的参数设为缺省值; PPP_Cmd:使能或失能PPP外设; PPP_ItConfig:使能或失能PPP外设的中断源; PPP_GetITStatus:判断PPP外设中断发生与否; PPP_ClearITPendingBit:清除PPP外设中断待处理标志位; PPP_DMAConfig:使能或者失能PPP外设的DMA接口; PPP_GetFlagStatus:检查PPP外设的标志位; PPP_ClearFiag:清除PPP外设的标志位。 2.文件结构:每个C程序通常分为两个文件,一个文件用于保存程序的声明,成为头文件,以.h为后缀。另一个用于保存程序的实现,称为源文件,以.c后缀。 3.C语言的关键字有32个,根据作用分为数据类型、控语言、储存类型、其他关键字。 4.指针:是C语言中广泛使用的一种数据类型. 5.指向数组元素的指针 定义一个整形数组和一个指向整型的指针变量: Int a [10]; Int*p=NULL;//定义指针式要初始化 P=a;//数组名a为数组第0个元素的地址 //与p=&a[0]等价 P+i和a+i表示a[i]的地址;*(p+i)和*(a+i)表示P+i和a+i内容。 6.结构体:是由基本数据类型构成的,并并一个标识符来命名的各种变量的组合。
单片机存储器处理器成本STM32 背景如果你正为项目的处理器而进行艰难的选择:一方面抱怨16位单片机有限的指令和性能,另一方面又抱怨32位处理器的高成本和高功耗,那么,基于ARM Cortex-M3内核的STM32系列处理器也许能帮你解决这个问题。使你不必在性能、成本、功耗等因素之间做出取舍和折衷。 即使你还没有看完STM32的产品手册,但对于这样一款融合ARM和ST技术的“新生儿”相信你和我一样不会担心这款针对16位MCU应用领域的32位处理器的性能,但是从工程的角度来讲,除了芯片本身的性能和成本之外,你或许还会考虑到开发工具的成本和广泛度;存储器的种类、规模、性能和容量;以及各软件获得的难易,我相信你看完本专题会得到一个满意的答案。 对于在16位MCU领域用惯专用在线仿真器(ICE)的工程师可能会担心开发工具是否能够很快的上手?开发复杂度和整体成本会不会增加?产品上市时间会不会延长?没错,对于32位嵌入式处理器来说,随着时钟频率越来越高,加上复杂的封装形式,ICE已越来越难胜任开发工具的工作,所以在32位嵌入式系统开发中多是采用JTAG仿真器而不是你熟悉的ICE。但是STM32采用串行单线调试和JTAG,通过JTAG调试器你可以直接从CPU获取调试信息,从而将使你的产品设计大大简化,而且开发工具的整体价格要低于ICE,何乐而不为? 有意思的是STM32系列芯片上印有一个蝴蝶图像,据ST微控制器产品部Daniel COLONNA 先生说,这是代表自由度,意在给工程师一个充分的创意空间。我则“曲解”为预示着一种蝴蝶效应,这种蝴蝶效应不仅会对方案提供商以及终端产品供应商带来举足轻重的影响,而且会引起竞争对手策略的改变……翅膀已煽动,让我们一起静观其变! STM32市面上流通的型号截至2010年7月1日,市面流通的型号有:基本型:STM32F101R6 STM32F101C8 STM32F101R8 STM32F101V8 STM32F101RB STM32F101VB 增强型:STM32F103C8 STM32F103R8 STM32F103V8 STM32F103RBSTM32F103VB STM32F103VE STM32F103ZE STM32系列的作用简介ARM公司的高性能”Cortex-M3”内核 1.25DMips/MHz,而ARM7TDMI只有0.95DMips/MHz 一流的外设 1μs的双12位ADC,4兆位/秒的UART,18兆位/秒的SPI,18MHz的I/O翻转速度低功耗 在72MHz时消耗36mA(所有外设处于工作状态),待机时下降到2μA 最大的集成度 复位电路、低电压检测、调压器、精确的RC振荡器等 简单的结构和易用的工具 STM32F10x重要参数2V-3.6V供电 容忍5V的I/O管脚 优异的安全时钟模式 带唤醒功能的低功耗模式 内部RC振荡器 内嵌复位电路 工作温度范围: -40°C至+85°C或105°C STM32F101性能特点36MHz CPU 多达16K字节SRAM 1x12位ADC温度传感器 STM32F103性能特点72MHz CPU多达20K字节SRAM 2x12位ADC 温度传感 PWM定时器 CAN USB STM32互联型系列简介:全新STM32互连型(Connectivity)系列微控制器增加一个全
STM32的基本系统主要涉及下面几个部分: 1、电源 1)、无论是否使用模拟部分和AD部分,MCU外围出去VCC和GND,VDDA、VSSA、Vref(如果封装有该引脚)都必需要连接,不可悬空; 2)、对于每组对应的VDD和GND都应至少放置一个104的陶瓷电容用于滤波,并接该电容应放置尽量靠近MCU; 2、复位、启动选择 1)、Boot引脚与JTAG无关。其仅是用于MCU启动后,判断执行代码的起始地址; 2)、在电路设计上可能Boot引脚不会使用,但要求一定要外部连接电阻到地或电源,切不可悬空; 3、调试接口 4、ADC 1)、ADC是有工作电压的,且与MCU的工作电压不完全相同。MCU工作电压可以到2.0V~3.6V,但ADC模块工作的电压在2.4V~3.6V。设计电路时需要注意。 5、时钟 1)、STM32上电默认是使用内部高速RC时钟(HSI)启动运行,如果做外部时钟(HSE)切换,外部时钟是不会运行的。因此,判断最小系统是否工作用示波器检查OSC是否有时钟信号,是错误的方法; 2)、RTC时钟要求使用的32.768振荡器的寄生电容是6pF,这个电容区别于振荡器外部接的负载电容; 5、GPIO 1)、IO推动LED时,建议尽量考虑使用灌电流的方式。 2)、在Stop等低功耗模式下,为了更省电,通常情况下建议GPIO配置为带上拉的输出模式,输出电平由外部电路决定; 6、FSMC 1)、对应100pin或144pin,FSMC的功能与I2C是存在冲突的,如果FSMC时钟打开,I2C 1的硬件模式无法工作。这在STM32F10xxx的勘误表中是有描述的。 ST官方推荐的几大主流开发板的原理图,在画电路的时候可以做为参考依据: 1、IAR https://www.doczj.com/doc/0f4260378.html, 1)、STM32F103RBT6 点击此处下载ourdev_606049.pdf(文件大小:208K)(原文件名:IAR_STM32_SK_revB.pdf)
海南大学 毕业论文(设计) 题目:基于stm32的智能小车设计学号:20112834320005 姓名:陈亚文 年级:2011级 学院:应用科技学院(儋州校区) 学部:工学部 专业:电子科学与技术 指导教师:张健 完成日期:2014 年12 月 1 日
摘要 本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。 关键词:stm32;红外探测;超声波避障;PWM;电机控制
Abstract This experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process. The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance. This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering, tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function. When the car is moving, obstacle avoidance program prior to tracking, using ultrasonic ranging and obstacle avoidance obstacle avoidance circuit, we use steering gear under ultrasonic module to control the emission direction of ultrasonic, infrared detection circuit is used to implement the car tracking function. On the basis of the hardware design is proposed for motor control function, simple intelligent car tracking and obstacle avoidance function of software design, and in the STM32 integrated development environment under the Keil. Write the corresponding control program, and use McUisp program download software. Keywords:STM32;Infrared detection;Ultrasonic obstacle avoidance;PWM;Motor control
一、嵌入式计算机系统体系结构 体系主要组成包括: 1. 硬件层 硬件层中包含嵌入式微处理器、存储器(SDRAM 、ROM 、Flash 等)、通用设备接口和I/O 接口(A/D 、D/A 、I/O 等)。在一片嵌入式处理器基础上添加电源电路、时钟电路和存储器电路,就构成了一个嵌入式核心控制模块。其中操作系统和应用程序都可以固化在ROM 中。 2. 中间层 硬件层与软件层之间为中间层,也称为硬件抽象层(Hardware Abstract Layer ,HAL )或板级支持包(Board Support Package ,BSP ),它将系统上层软件与底层硬件分离开来,使系统的底层驱动程序与硬件无关,上层软件开发人员无需关心底层硬件的具体情况,根据BSP 层提供的接口即可进行开发。该层一般包含相关底层硬件的初始化、数据的输入/输出操作和硬件设备的配置功能。 软件层 功能层
3. 系统软件层 系统软件层由实时多任务操作系统(Real-time Operation System,RTOS)、文件系统、图形用户接口(Graphic User Interface,GUI)、网络系统及通用组件模块组成。RTOS是嵌入式应用软件的基础和开发平台。 4. 功能层 功能层主要由实现某种或某几项任务而被开发运行于操作系统上的程序组成。 一个嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成,而嵌入式计算机系统是整个嵌入式系统的核心,由硬件层、中间层、系统软件层和应用软件层组成。执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。 硬件的设计 本网关硬件环境以单片机S3C2440芯片和DM9000以太网控制芯片为主,实现RJ45接口和RS232接口的数据传输。内容包括硬件环境的初始化,数据的收发控制,封包解包设计,操作系统的移植等。 硬件框图 硬件框图是简单的将每个功能模块列出,也是一个基本的模块组合,可以简洁的每个模块的功能体现出来。 其中包括了电源模块,处理模块,串口模块以及网口模块。 电源模块主要的用途是负责给整块开发板进行供电,保证每个模块都可以正常工作。 处理模块主要的用途是负责协议的转换,数据的处理等,以保障通信的畅通。 串口模块以及网口模块主要的用途是负责各网络相关数据信息的收发。
基于STM32的激光虚拟键盘的硬件设计 摘要:随着科技的进步,人们对电影银幕上曾经出现过的各种高新科技产品的 追求越来越强烈,虚拟化、全息技术和云计算作为未来科技的标向,目前已炙手 可热。大到国家工业军事设备,小到身边随处可见的办公生活用品,无一不在向 这个方向发展,我们的课题——激光投影键盘便是顺从了这样的一个发展方向。 关键词:红外光;图像信号定位编码;单片机 虚拟激光投影键盘,简称激光键盘,是虚拟键盘的一种。它是利用激光将键 盘投影在一个平面,以达到在随机环境中使用的功能。该虚拟键盘设备需要满足: 高亮度,可在正常室内照明环境下,显示出清晰的键盘图像; 高稳定性和安全性,可长 时间稳定运行,不对人体造成伤害; 满足低成本,便于推广的要求,从而替代传统的机 械式键盘。 1硬件系统总体方案设计 系统的硬件接口图如图3-1所示。主要电路包括:主控电路、OV7670摄像头电路、电源电路、显示电路、串口通讯电路、指示灯电路。 2 主控芯片的介绍 STM32F103RBT6单片机主要特点:程序储存器内存至少64K,足够本设计程 序的存储;工作电压3.3V,同时摄像头和TFT彩屏工作电压都是3.3V,可以在同 一电压下工作;晶振范围从4到16MHZ,通过PLL产生CPU时钟,主频可以达到72MHZ,速度快;具有两个18M位/秒SPI;3个USRT可供调试使用;JTAG接口 和串行单线调试提供在线下载和调试,为软件调试提供了很大的方便和节约时间;丰富的的I/O口,为彩屏、摄像头提供了接口资源等等;图3-2为STM32微控制 器的电路设计。一端接复位引脚另一端接3.3V的R3上拉电阻,起限流作用,单 片机采用按键复位的方法,高电平复位,当按键按下时,单片机复位被拉为高电平,从而实现单片机复位,在S1按键没按下的时候,复位引脚为高电平,当S1 按键按下时,复位引脚变为低电平,按键松开时,复位引脚再变为高电平,这个 过程复位引脚由高变低再变高,这就实现了硬件复位;C5电容除了过滤一些杂波防止乱复位,还可以在单片机刚刚上电的时候,电容的充放电过程,电平由低变高,从而实现了上电复位。 3 OV7670摄像头电路 OV7670带FIFO模块,是针对慢速的MCU能够实现图像采集控制推出的带 有缓冲存储空间的一种模块。带FIFO的摄像头比不带的多了个3M的缓存,可将 采集的数据暂存在这个缓存中,使用时读取缓存中的图像数据即可,因此可减少对 单片机采集图像数据时对MCU速度的要求。 接下来说明一下摄像头和单片机接口, GDN-----接地点 SIO_C---SCCB 接口的控制时钟 SIO_D---SCCB接口的串行数据输入(出)端 VSYNC---帧同步信号(输出信号) HREF----行同步信号(输出信号) PCLK----像素时钟(输出信号)
发现最近有关STM32硬件电路设计的帖子稍有增多,也许STM32对于大家来说还算比较新的东西的缘故吧。因ST 有一份应用笔记:AN2586 “STM32F10xxx hardware development:getting started”已经有很详细的描述了,之前也就没有就STM32的硬件电路设计在论坛上罗嗦什么。这次感觉很多网友都不太爱去ST 的官方网站上更新最新的Aplication note ,其实很多设计中需要注意的事项在官方提供的应用笔记中都有提到,这里就全当做一个总结吧。也欢迎有兴趣的和我(grant_jx@https://www.doczj.com/doc/0f4260378.html, )沟通电路设计的问题,希望大家相互学习进步,如果说错的地方,也欢迎提出。 STM32的基本系统主要涉及下面几个部分: 1、电源 1)、无论是否使用模拟部分和AD 部分,MCU 外围出去VCC 和GND ,VDDA 、VSSA 、Vref(如果封装有该引脚)都必需要连接,不可悬空; 2)、对于每组对应的VDD 和GND 都应至少放置一个104的陶瓷电容用于滤波,并接该电容应放置尽量靠近MCU ; 2、复位、启动选择 1)、Boot 引脚与JTAG 无关。其仅是用于MCU 启动后,判断执行代码的起始地址; 2)、在电路设计上可能Boot 引脚不会使用,但要求一定要外部连接电阻到地或电源,切不可悬空; 3、调试接口 4、ADC 1)、ADC 是有工作电压的,且与MCU 的工作电压不完全相同。MCU 工作电压可以到2.0V ~3.6V ,但ADC 模块工作的电压在2.4V ~3.6V 。设计电路时需要注意。 5、时钟 1)、STM32上电默认是使用内部高速RC 时钟(HSI)启动运行,如果做外部时钟(HSE)切换,外部时钟是不会运行的。因此,判断最小系统是否工作用示波器检查OSC 是否有时钟信号,是错误的方法; 2)、RTC 时钟要求使用的32.768振荡器的寄生电容是6pF ,这个电容区别于振荡器外部接的负载电容; 5、GPIO 1)、IO 推动LED 时,建议尽量考虑使用灌电流的方式。 2)、在Stop 等低功耗模式下,为了更省电,通常情况下建议GPIO 配置为带上拉的输出模式,输出电平由外部电路决定; 6、FSMC 1)、对应100pin 或144pin,FSMC 的功能与I2C 是存在冲突的,如果FSMC 时钟打开,I2C 1的硬件模式无法工作。这在STM32F10xxx 的勘误表中是有描述。 Generated by Foxit PDF Creator ? Foxit Software https://www.doczj.com/doc/0f4260378.html, For evaluation only.
名词解释 填空 选择 简答 计算 1. 计算机系统的多级层次结构: 2. 系统结构的概念:计算机系统结构指的是计算机系统的软、硬件的界面,即机器语言程 序员或编译程序设计者所能看到的传统机器级所具有的属性。 3. 在计算机技术中,对本来存在的事物或属性,但从某种角度看又好象不存在的概念称为 透明性。 4. 对于通用寄存器型机器,这些属性主要是指:(选择题) 1) 指令系统(包括机器指令的操作类型和格式、指令间的排序和控制机构等) 2) 数据表示 (硬件能直接辩认和处理的数据类型) 3) 寻址规则 (包括最小寻址单元、寻址方式及其表示) 4) 寄存器定义 (包括各种寄存器的定义、数量和使用方式) 5) 中断系统 (中断的类型和中断响应硬件的功能等) 6) 机器工作状态的定义和切换 (如管态和目态等) 7) 存储系统 (主存容量、程序员可用的最大存储容量等) 8) 信息保护 (包括信息保护方式和硬件对信息保护的支持) 9) I/O 结构(包括I/O 连接方式、处理机/存储器与I/O 设备间数据传送的方式和格式 以及I/O 操作的状态等) 5. 计算机组成指的是计算机系统结构的逻辑实现,包含物理机器级中的数据流和控制流的 组成以及逻辑设计。 6. 计算机实现指的是计算机组成的物理实现。 7. 数据表示是指计算机硬件能够直接识别、指令集可以直接调用的数据类型。 8. 数据类型、数据结构、数据表示之间的关系 第6级 第5级 第4级 第3级 第2级 第1级
9.系列机指由同一厂商生产的具有相同体系结构、但具有不同组成和实现的一系列不同型 号的机器。 10.常见的计算机系统结构分类法有两种:Flynn分类法和冯氏分类法。冯氏分类法是用系 统的最大并行度对计算机进行分类;Flynn分类法是指按照指令流和数据流的多倍性进行分类。 11.定量分析技术(简答题): 1)以经常性事件为重点:在计算机系统设计中,经常需要在多种不同的方法之间进行 折中,这时应按照对经常发生的情况采用优化方法的原则进行选择。 2)Amdahl定律:加速某部件执行速度所能获得的系统性能加速比,受限于该部件的 执行时间占系统中总执行时间的百分比。 3)CPU性能公式:执行一个程序所需的CPU时间=执行程序所需的时钟周期数*时钟 周期时间 4)程序的局部性原理:指程序执行时所访问的存储器地址分布不是随机的,而是相对 簇聚的。分为时间局部性和空间局部性。 12.冯诺依曼结构的特点:以运算器为中心;在存储器中,指令和数据同等对待;存储器是 按地址访问、按顺序线性编址的一维结构,每个存储单元的位数是固定的;指令是按顺序执行的;指令由操作码和地址码组成;指令和数据均以二进制编码表示,采用二进制运算。 13.实现可移植性的常用方法有三种:采用系列机、模拟与仿真、统一高级语言。 14.系列机在兼容方面,向后兼容一定要保证,尽量保证向上兼容 15.模拟是指用软件的方法在一台现有的计算机上实现另一台计算机的指令集。(软件方法) 16.仿真是指用一台现有计算机上的微程序去解释实现另一台计算机的指令集。(硬件方法) 17.并行性包括同时性和并发性。 18.从执行程序的角度来看,并行性等级从低到高可分为:(简答) 1)指令内部并行:单条指令中各微操作之间的并行 2)指令级并行:并行执行两条或两条以上的指令 3)线程级并行:并行执行两个或两个以上的线程,通常是以一个进程内派生的多个线 程为调度单位。 4)任务级或过程级并行:并行执行两个或两个以上的过程或任务,以子程序或进程为 调度单位。 5)作业或程序级并行:并行执行两个或两个以上的作业或程序。 19.提高并行性的技术路径(12字):时间重叠、资源重复、资源共享 20.能够对紧密耦合系统和松散耦合系统进行区分: 紧密耦合系统共享主存,松散耦合系统共享外设
志峰物联公司版权所有技术支持QQ:498034132I STM32F107网络互联开发板V2.2硬件使用手册 版本号:A 拟制人:赵志峰 时间:2013年7月1 日
目录 1本文档编写目的 (1) 2硬件接口说明 (1) 3核心硬件电路说明 (2) 3.1电源电路 (2) 3.2按键与LED电路 (3) 3.3JTAG下载电路 (4) 3.4外扩存储电路 (5) 3.5RS232通讯电路 (5) 3.6RS485通讯电路 (6) 3.7CAN通讯电路 (6) 3.8USB电路 (6) 3.9DS18B20电路 (7) 3.10以太网接口电路 (8) 3.112.4G无线接口 (8) 4使用注意事项 (8)
1本文档编写目的 本使用手册是针对STM32F107网络互联开发板V2.2的硬件而编写的,包括硬件接口说明、核心硬件电路说明、使用注意事项等内容。 2硬件接口说明 该开发板的硬件结构如图1所示: STM32F107VCT6 LED USB OTG USB HOST DS18B20 图1硬件结构框图 开发板实物接口如图2所示: CAN2_L CAN2_H CAN1_L CAN1_H RS232RS485_B RS485_A 2.4G USB USB OTG USB 5V DS18B20JTAG CAN1 图2开发板硬件接口
注意:DS18B20的安装方向: DS18B20安装方式 3核心硬件电路说明 3.1电源电路 开发板供电方式有两种:5V电源适配器供电和USB供电。(1)5V适配器供电 直接将5V适配器插在J6上即可为板子供电,电路如图3所示:
系统结构与硬件 1.绘图仪属于 A: 输出设备 B: 输入设备和输出设备 C: 输入设备 D: 计算机正常工作时不可缺少的设备 2.计算机的存储系统一般指主存储器和 A: 累加器 B: 寄存器 C: 辅助存储器 D: 鼠标器 3.把硬盘上的数据传送到计算机的内存中去,称为 A: 打印 B: 写盘 C: 输出 D: 读盘 4.CPU 是计算机硬件中的()部件。 A: 核心 B: 辅助 C: 主存 D: 输入输出 5.CPU 中的运算器的主要功能是 ( )。 A: 负责读取并分析指令 B: 算术运算和逻辑运算 C: 指挥和控制计算机的运行 D: 存放运算结果 6.CPU 中的控制器的功能是( )。 A: 进行逻辑运算 B: 进行算术运算 C: 控制运算的速度 D: 分析指令并发出相应的控制信号 7.以下全是输入设备的是 A: 键盘、扫描仪、打印机 B: 键盘、硬盘、打印机 C: 鼠标、硬盘、音箱 D: 扫描仪、键盘、只读光盘 8.现代计算机系统是以()为中心的。 A: 中央处理器 B: 内存 C: 运算器 D: 控制器 9.计算机中必要的、使用最广泛的、用于人机交互的输出设备是
A: 打印机 B: 显示器 C: 绘图仪 D: 声卡 10.半导体只读存储器(ROM)与半导体随机存储器(RAM)的主要区别在于A: ROM 可以永久保存信息,RAM 在掉电后信息会消失 B: ROM 掉电后,信息会消失,RAM 不会 C: ROM 是内存储器,RAM 是外存储器 D: RAM 是内存储器,ROM 是外存储器 11.CPU 的中文意思是 A: 中央处理器 B: 主机 C: 控制器 D: 计算机器 12.内存与外存的主要不同在于 A: CPU 可以直接处理内存中的信息,速度快,存储容量大;外存则相反。B: CPU 可以直接处理内存中的信息,速度快,存储容量小;外存则相反。C: CPU 不能直接处理内存中的信息,速度慢,存储容址大,外存则相反。D: CPU 不能直接处理内存中的信息,速度慢,存储容量小,外存则相反13.能够将图片输入到计算机内的装置是 A: 打印机 B: 扫描仪 C: 鼠标 D: 键盘 14.微型机中硬盘工作时,应特别注意避免 A: 光线直射 B: 环境卫生不好 C: 强烈震动 D: 噪声 15.ROM 指的是 A: 只读存储器 B: 硬盘存储器 C: 随机存储器 D: 软盘存储器 16.I/O 设备的含义是 A: 输入输出设备 B: 通信设备 C: 网络设备 D: 控制设备 17.计算机突然停电,则计算机____全部丢失。 A: 硬盘中的数据和程序 B: ROM 中的数据和程序 C: ROM 和RAM 中的数据和程序 D: RAM 中的数据和程序
以前看到摘录的,帖过来参考: F1采用Crotex M3内核,F4采用Crotex M4内核。 F1最高主频 72MHz, F4最高主频168MHz。 F4具有单精度浮点运算单元,F1没有浮点运算单元。 F4的具备增强的DSP指令集。F4的执行16位DSP指令的时间只有F1的30%~70%。F4执行32位DSP指令的时间只有F1的25~60%。 F1内部SRAM最大64K字节, F4内部SRAM有192K字节(112K+64K+16K)。 F4有备份域SRAM(通过Vbat供电保持数据),F1没有备份域SRAM。 F4从内部SRAM和外部FSMC存储器执行程序的速度比F1快很多。F1的指令总线I-Bus只接到Flash上,从SRAM和FSMC取指令只能通过S-Bus,速度较慢。F4的I-Bus不但连接到Flash上,而且还连接到SRAM和FSMC上,从而加快从SRAM或FSMC取指令的速度。 F1最大封装为144脚,可提供112个GPIO;F4最大封装有176脚,可提供140个GPIO。 F1的GPIO的内部上下拉电阻配置仅仅针对输入模式有用,输出时无效。而F4的GPIO在设置为输出模式时,上下拉电阻的配置依然有效。即F4可以配置为开漏输出,内部上拉电阻使能,而F1不行。 F4的GPIO最高翻转速度为84MHz,F1最大翻转速度只有18MHz。 F1最多可提供5个UART串口,F4最多可以提供6个UART串口。 F1可提供2个I2C接口,F4可以提供3个I2C接口。 F1和F4都具有3个12位的独立ADC,F1可提供21个输入通道,F4可以提供24个输入通道。F1的ADC最大采样频率为1Msps,2路交替采样可到2Msps(F1不支持3路交替采样)。F4的ADC最大采样频率为2.4Msps,3路交替采样可到7.2Msps。 F1只有12个DMA通道,F4有16个DMA通道。F4的每个DMA通道有4*32位FIFO,F1没有FIFO。 F1的SPI时钟最高速度为 18MHz, F4可以到37.5MHz。 F1没有独立的32位定时器(32位需要级联实现),F4的TIM2和TIM5具有32位上下计数功能。 F1和F4都有2个I2S接口,但是F1的I2S只支持半双工(同一时刻要么放音,要么录音),而F4的I2S支持全双工,放音和录音可以同时进行。