
通用实体 答案:通用实体包含文档内容,即XML文本、其它文本或非文本数据。 伪类 答案:伪类是特殊的类,能自动地被支持CSS的浏览器所识别。 存储过程 答案:存储过程是由一系列SQL语句组成,常被设计用来完成一个特定的功能,便于共享及程序模块化。 Request 答案:ASP内置对象,它在一个HTTP请求过程中,获取由浏览器传送给服务器的消息。包括从HTML 表单、cookie 和客户端认证等。 外部实体 答案:外部实体是指包含在独立文件中的实体。 数组 答案:数组是若干个元素的有序集合,每个数组有一个名字作为其标识。 SQL 答案:SQL是一个被广泛采用、适用于关系数据库的数据库语言工业标准,他是一种数据库子语言,是一种控制与DBMS 交互的语言。 表单 答案:提供图形用户界面的基本元素,包括按钮、文本框、单选框、复选框等等,是HTML实现交互功能的主要接口,用户通过表单向服务器提交数据。 全局变量 答案:变量在过程外被声明,则它的作用域是整个脚本程序范围,可被所有过程引用,称之为全局变量。 局部变量 答案:变量在过程中被声明,则它的作用域仅局限于该过程,称之为局部变量。 事件 答案:事件是指计算机进行一定操作而得到的结果。 可析实体 答案:可析实体是一种由XML文本组成的实体。 统一资源定位器URL(Uniform Resource Locator) 答案:统一资源定位器URL(Uniform Resource Locator)是用来确定用户所需信息的确切位置。包括信息资源的名称及地址。 事件处理程序 答案:对事件进行处理的程序或函数称之为事件处理程序。 Application 答案:ASP内置对象,它用于存储和管理与该Web应用程序有关的信息,在一个ASP应用内让不同使用者共享信息。 域名服务系统(DNS)
第四章 旋转机械检修技术 一、填空题 1.无键联接的工件在拆卸时,推进器与轮毂外端面间应留一定间隙,其值不宜超过 ,以防轮毂高速推出时伤害工件和人。 2.尺型联轴器中间套筒对正连接后,应有一定的 浮动量,其值一般在3~6mm 。选值原则是:在 浮动量下应保证两轮毂外齿能同时全齿啮合。在 浮动量下不会因转子位移发生轮毂与接筒卡死。 3.离心式压缩机筒式内缸体段间密封在高压工况下选用O 形环,要和 同时使用,若单向受压,选用 背环,背环装配在 侧。若双向交替受压则选用 背环,在O 形环的两侧各置一个背环。 4.液力连轴器又称液力 器。它是利用液体 能来传递功率的液力传动机构。 5.风机按排气压力(p d )来分,可分为三大类。当排气压力p d ≤14.7kPa ,称为 ;当排气压力p d 在14.7kPa <p d ≤0.2MPa 时,称为 ;当排气压力p d >0.2MPa ,称为 。 6.一般的平衡精度转子,动平衡时可直接采用 的支承,对精度要求高的转子做高度动平衡时,必须采用 的原配轴承,并应在 环境下进行。 7.国产气轮机驱动的压缩机组用增速齿轮箱,以齿形分有 类。分别是 齿面圆弧齿斜齿或人字齿轮和 齿面渐开线斜齿或认字齿轮。 8.离心式压缩机组的连接方法有三种,它们依次是 、 和 。 9.干式气缸套不与 接触,仅起衬套作用,常用于压缩机的 、 压段,湿式气缸套的外表面与冷却水接触,常用在压缩机的低压段,装配要 。 10. Cl - 对奥氏体不锈钢的破坏属于 ,其作用条件除湿度因素外,还有两个重要条件是 和液相中 。 11.应力腐蚀、腐蚀疲劳和氢脆现象,都是金属材料受介质侵袭而导致的 破坏性。 12.起重吊钩应在 区作出永久标志,内容包括 载荷、厂表、产品编号。吊钩应设置 机构。手动吊钩的试验载荷为标志载荷的 倍,25t 以下的机用吊钩的试验载荷为标志载荷的2倍,吊钩开口增大 %,扭转变形≥10%,吊钩应报废。 13.叶轮作功的大小,取决于叶轮通道,特别是 截面到 截面气流速度的变化。为表示其变化情况,通常把 速度、 速度ω和 速度c 做成矢量图,称为气流速度三角形。 14.离心式压缩机的性能曲线是指在一定的转速和进气条件下,机器的 、 、 等性能参数随流量变化的关系曲线。 15.离心式压缩机所采用的叶轮,其出口安装角2A β都不大于90度,径向直叶轮2A β为 ,后弯形叶轮2A β为 ,强后弯形叶轮2A β为 。 16.新配置叶轮或者经修复的叶轮,在装到转子上之前应进行超速试验,超试转速为正常工作转速的 倍,超速时间 min ,超速试验后各部尺寸变化不超过 %。 17.在一定转速下工作的离心式压缩机,由于工艺方面的原因,如果系统压力突然 或进气温度 ,一旦出现压缩机排气压力 系统压力即会发生喘振。 18.引起离心式压缩机轴向推力增大的原因有: 、 、 、 。 19.离心式压缩机振动频率分析,当振频与转速同频时多因 ,振频小于或等于1/2转速频率时一般是因 、 。 20.齿轮增速箱接触精度检查要求:齿轮接触斑点渐开线齿轮要求齿高方向为 %,
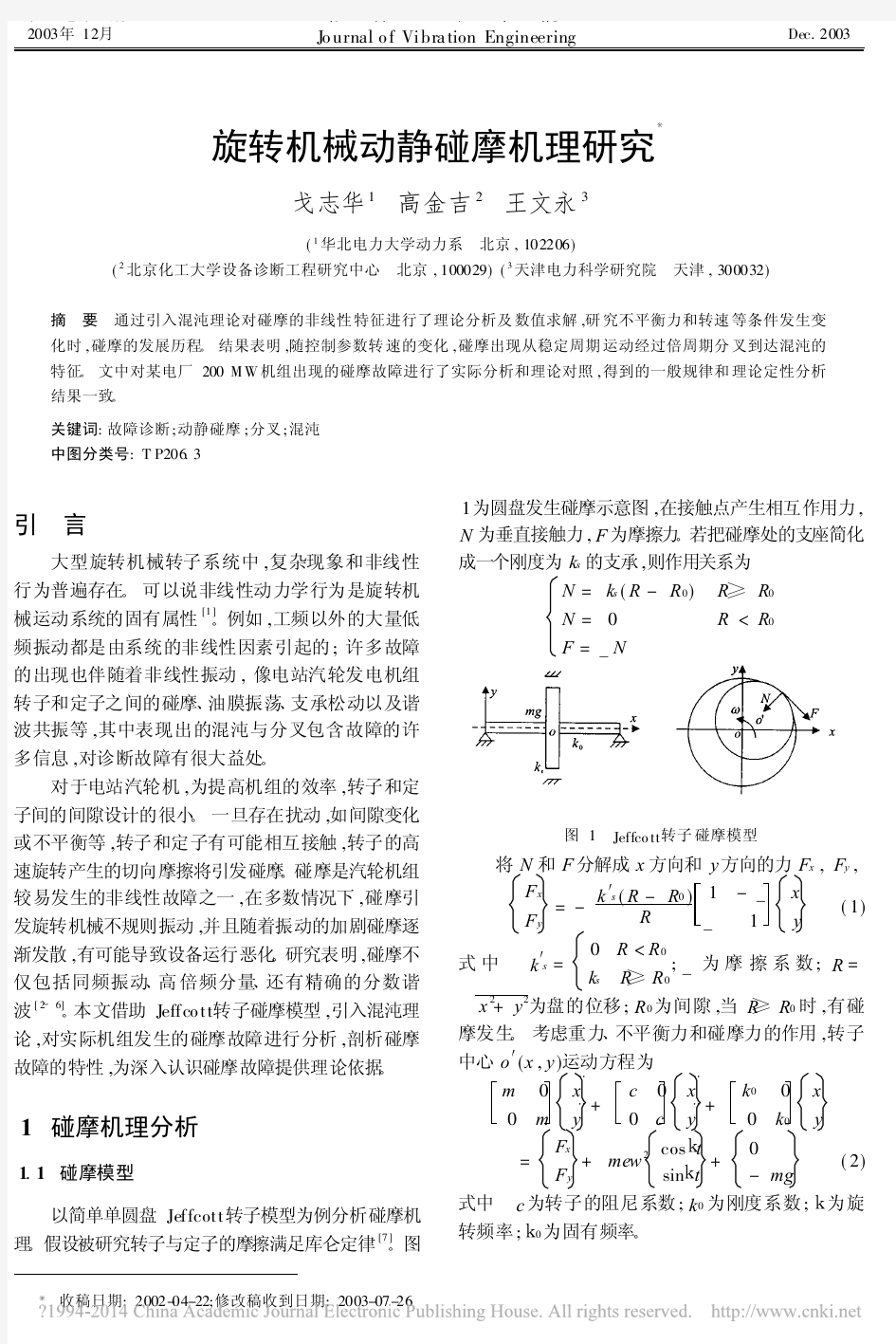
旋转机械振动的基本特性 一、转子的振动基本特性 大多数情况下,旋转机械的转子轴心线是水平的,转子的两个支承点在同一水平线上。设转子上的圆盘位于转子两支点的中央,当转子静止时.由于圆盘的重量使转子轴弯曲变形产生静挠度,即静变形。此时,由于静变形较小,对转子运动的影响不显著,可以忽略不计,即认为圆盘的几何中心O′与轴线AB上O点相重合,如图7—l所示。转子开始转动后,由于离心力的作用,转子产生动挠度。此时,转子有两种运动:一种是转子的自身转,即圆盘绕其轴线AO′B的转动;另一种是弓形转动,即弯曲的轴心线AO′B与轴承联线AOB组成的平面绕AB轴线的转动。 转子的涡动方向与转子的转动角速度ω同向时,称为正进动;与ω反方向时,称为反进动。 二、临界转速及其影响因素 随着机器转动速度的逐步提高,在大量生产实践中人们觉察到,当转子转速达到某一数值后,振动就大得使机组无法继续工作,似乎有一道不可逾越的速度屏障,即所谓临界转速。Jeffcott用—个对
称的单转子模型在理论上分析了这一现象,证明只要在振幅还未上升到危险程度时,迅速提高转速,越过临界转速点后,转子振幅会降下来。换句话说,转子在高速区存在着一个稳定的、振幅较小的、可以工作的区域。从此,旋转机械的设计、运行进入了一个新时期,效率高、重量轻的高速转子日益普遍。需要说明的是,从严格意义上讲,临界转速的值并不等于转子的固有频率,而且在临界转速时发生的剧烈振动与共振是不同的物理现象。 在正常运转的情况下: (1)ω<n ω时, 振幅A>0,O′点和质心G 点在O 点的同一侧,如图7—3(a)所示; (2)ω>n ω时,A<0,但A>e,G 在O 和O′点之间,如图 7—3(c)所示; 当ω≥n ω时,A e -≈或O O′≈-O′G,圆盘的质心G 近似 地落在固定点O,振动小。转动反而比较平稳。这种情况称为“自动对心”。 (3)当ω=n ω时,A ∞→,是共振情况。实际上由于存在阻尼,振幅A 不是无穷大而是较大的有限值,转轴的振动非常剧烈,以致有可 能断裂。n ω称为转轴的“临界角速度” ;与其对应的每分钟的转数则称为“临阶转速”。 如果机器的工作转速小于临界转速,则称为刚性轴;如果工作转速高于临界转速,则称为柔性轴。由上面分析可知,只有柔性轴的旋转机器运转时较为平稳 但在启动过程中,要经过临界转速。如果缓
什么是失速?失速的原因是什么? 风机处于正常工况时,冲角很小(气流方向与叶片叶弦的夹角即为冲角),气流绕过机翼型叶片而保持流线状态,当气流与叶片进口形成正冲角,即α>0,且此正冲角超过某一临界值时,叶片背面流动工况开始恶化,边界层受到破坏,在叶片背面尾端出现涡流区,即所谓“失速”现象。冲角大于临界值越多,失速现象越严重,流体的流动阻力越大,使叶道阻塞,同时风机风压也随之迅速降低。 风机的叶片在加工及安装过程中,由于各种原因使叶片不可能有完全相同的形状和安装角。因此,当运行工况变化而使流动方向发生偏离时,在各个叶片进口的冲角就不可能完全相同。如果某一叶片进口处的冲角达到临界值时,就首先在该叶片上发生失速,而不会所有叶片都同时发生失速。假如u是对应叶片上某点的周向速度;w是气流对叶片的相对速度;α为冲角。假设叶片2和3间的叶道23首先由于失速出现气流阻塞现象,叶道受堵塞后,通过的流量减少,在该叶道前形成低速停滞区,于是气流分流进入两侧通道12和34,从而改变了原来的气流方向,使流入叶道12的气流冲角减小,而流入叶道34的冲角增大。可见,分流结果使叶道12绕流情况有所改善,失速的可能性减小,甚至消失;而叶道34内部却因冲角增大而促使发生失速,从而又形成堵塞,使相邻叶道发生失速。这种现象继续进行下去,使失速所造成的堵塞区沿着与叶轮旋转相反的方向推进,即产生所谓的“旋转失速”现象。风机进入到不稳定工况区运行,叶轮内将产生一个到数个旋转失速区。叶片每经过一次失速区就会受到一次激振力的作用,从而可使叶片产生共振。此时,叶片的动应力增加,可能致使叶片断裂,造成重大设备损坏事故。 大型火电机组的送风机一般是定转速运行的,即叶片周向速度u是一定值,这样影响叶片冲角大小的因素就是气流速度与叶片开度角。当叶片开度角β一定时,如果气流速度c
计算机软件一般分为系统软件和应用软件两大类,不属于系统软件的是()。 A.操作系统 B.数据库管理系统 C.客户管理系统 D.语言处理程序 您的答案:C 题目分数:5 此题得分:5.0 2.第6题 网络学生对学习全过程进行自主管理的意识是()。 A.自励意识 B.自动意识 C.自治意识 D.自觉意识 您的答案:C 题目分数:5 此题得分:5.0 3.第7题 保持微型计算机正常运行必不可少的输入输出设备是()。 A.键盘与鼠标 B.显示器与打印机 C.键盘和显示器 D.鼠标和扫描仪 您的答案:C 题目分数:5 此题得分:5.0 4.第12题 人们在网络中可以完全不受时间、地域和资格等的限制而自由地学习,这体现了网络学习的()。
B.虚拟性 C.交互性 D.自主性 您的答案:A 题目分数:5 此题得分:5.0 5.第14题 网络学生从外界获取评价并将此评价内化为良性刺激的意识是()。 A.自评意识 B.自控意识 C.自励意识 D.自动意识 您的答案:C 题目分数:5 此题得分:5.0 6.第15题 进行网络学习,最理想的学习风格是()。 A.抵抗型 B.顺从型 C.行为型 D.转化型 您的答案:D 题目分数:5 此题得分:5.0 7.第16题 断电后,会使存储的数据丢失的存储器是()。 A.RAM B.硬盘 C.ROM D.软件
您的答案:A 题目分数:5 此题得分:5.0 8.第19题 网络学生要确立的正确学习观念是()。 A.自律 B.他律 C.顺从 D.抵抗 您的答案:A 题目分数:5 此题得分:5.0 9.第3题 关于统考的说法,错误的有( ) A.从2005年开始,推行学生个人通过网络报名与缴费 B.提供网络报名缴费的网站是https://www.doczj.com/doc/0e4914930.html,,缴费通过中国银联网上支付平台进行。 C.统考合格教育部发放合格证书。 D.统考成绩一般于考试结束50天后,在https://www.doczj.com/doc/0e4914930.html,、网络学院及各学习中心查询。 您的答案:A,C,D 题目分数:5 此题得分:5.0 10.第8题 华南师范大学网络教育学院为https://www.doczj.com/doc/0e4914930.html,平台开发了如下哪些手机客户端.( ) A.iPhone手机客户端 B.Symbian手机客户端 C.Android手机客户端 D.WindowsPhone手机客户端 您的答案:A,C,D 题目分数:5 此题得分:5.0 11.第17题
XX公司机泵维修钳工培训教程 联轴器对中 炼化工业用的大部分旋转机器,都趋向于高速、大功率和不设备机。对于高速机械,就需要提高机器平衡和对中的精确性,以便尽量减小振动和减轻轴承、联轴器及轴封的过早磨损。单机功率的增大和不设备机两个因素提高了机器可靠性在经济上的重要性,而机器的可靠性又取决于减少机器关键零件的过早磨损和损坏。长期以来平衡作为减少振动和磨损的其中一种手段,已受到机器制造厂和用户的充分注意。 大型机组的运行状况除了与工艺状况直接相关外,还与机组的安装质量,检修质量有着密切的关系。而经验证明,相当多的机械损坏是由于对中不准造成的。对中是减少机器损坏,防止和排除突发故障及减少维修时间必不可少的重要环节。机械轴对中,以及确保安装过程中各部件之间的同心度是动力机械等装配工作中十分重要的一步,是机组安装及检修过程中保证质量的关键一环。 随着大型机组在各行业中的的应用越来越多,对中在使用、维护单位以及设计单位都逐渐被重视起来,特别是运行过程中对中的变化对机组运行有着十分重要的影响,因为所有因热膨胀或转子在轴承内运行时的偏移都会最终影响到轴承的受力,从而影响到机组的振动、轴承温度等关键特性。因此从设计制造厂到用户都对冷态对中曲线有着特别的关注。这些都需要对在冷态时相关联两转子之间的相对关系进行准确测量。但是应该看到,对中也是检修中最费时费力的。 任何方式的对中,甚至是用直尺对中,总比不对中要好,而用二只百分表的精确对中又要比粗糙的对中要好,特别是对3000rpm以上的机器,精确对中尤为重要。精确对中可大大地改善轴承和轴封的寿命、降低振动和得到良好的总体可靠性。然而,对中工
旋转机械振动的基本特性 概述 绝大多数机械都有旋转件,所谓旋转机械是指主要功能由旋转运动来完成的机械,尤其是指主要部件作旋转运动的、转速较高的机械。 旋转机械种类繁多,有汽轮机、燃气轮机、离心式压缩机、发电机、水泵、水轮机、通风机以及电动机等。这类设备的主要部件有转子、轴承系统、定子和机组壳体、联轴器等组成,转速从每分钟几十到几万、几十万转。 故障是指机器的功能失效,即其动态性能劣化,不符合技术要求。例如,机器运行失稳,产生异常振动和噪声,工作转速、输出功率发生变化,以及介质的温度、压力、流量异常等。机器发生故障的原因不同,所反映出的信息也不一样,根据这些特有的信息,可以对故障进行诊断。但是,机器发生故障的原因往往不是单一的因素,一般都是多种因素共同作用的结果,所以对设备进行故障诊断时,必须进行全面的综合分析研究。 由于旋转机械的结构及零部件设计加工、安装调试、维护检修等方面的原因和运行操作方面的失误,使得机器在运行过程中会引起振动,其振动类型可分为径向振动、轴向振动和扭转振动三类,其中过大的径向振动往往是造成机器损坏的主要原因,也是状态监测的主要参数和进行故障诊断的主要依据。 从仿生学的角度来看,诊断设备的故障类似于确定人的病因:医生需要向患者询问病情、病史、切脉(听诊)以及量体温、验血相、测心电图等,根据获得的多种数据,进行综合分析才能得出诊断结果,提出治疗方案。同样,对旋转机械的故障诊断,也应在获取机器的稳态数据、瞬态数据以及过程参数和运行状态等信息的基础上,通过信号分析和数据处理提取机器特有的故障症兆及故障敏感参数等,经过综合分析判断,才能确定故障原因,做出符合实际的诊断结论,提出治理措施。 根据故障原因和造成故障原因的不同阶段,可以将旋转机械的故障原因分为几个方面,见表1。 表1 旋转机械故障原因分类
机械设备振动标准 它是指导我们的状态监测行为的规范 最终目标:我们要建立起自己的每台设备的标准(除了新安装的设备)。 ?监测点选择、图形标注、现场标注。 ?振动监测参数的选择:做一些调整:长度、频率范围 ?状态判断标准和报警的设置 1 设备振动测点的选择与标注 1.1监测点选择 测点最好选在振动能量向弹性基础或系统其他部分进行传递的地方。对包括回转质量的设备来说,建议把测点选在轴承处或机器的安装点处。也可以选择其他的测点,但要能够反映设备的运行状态。在轴承处测量时,一般建议测量三个方向的振动。铅垂方向标注为V,水平方向标注为H,轴线方向标注为A,见图6-1。 图6-1 监测点选择
图 6-2在机器壳体上测量振动时,振动传感器定位的示意图 1.2 振动监测点的标注 (1)卧式机器 这个数字序列从驱动器非驱动侧的轴承座赋予数字001开始,朝着被驱动设备,按数字次序排列,直到第一根轴线的最后一个轴承。在多根轴线的(齿轮传动)机器上,轴承座的次序从驱动器开始,按数字次序继续沿着第二根轴线到被驱动器往下排列,接着再沿着第三根轴线往下排列,直到机组的末端为止。常见的几种标注方法见图6-3~6-5。 图6-3 振动监测点的标注 图6-4 振动监测点的标注
图6-5 振动监测点的标注 (2)立式机器 遵循与卧式机器同样的约定。 1.3 现场机器测点标注方法 机壳振动测点的标注可以用油漆标注,也可以在机壳上粘贴钢盘来标注振动测点,最好采用后一种方法标注。采用钢盘时,机壳要得到很好的处理。钢盘规格为厚度5mm,直径30mm,用强度较好的粘接剂粘接,以保证良好的振动传递特性。 2 设备振动监测周期的确定 振动监测周期设置过长,容易捕捉不到设备开始劣化信息,周期设置过短,又增加了监测的工作量和成本。因此应根据设备的结构特点、传动方式、转速、功率以及故障模式等因素,合理选定振动监测周期。当设备处于稳定运行期时,监测周期可以长一些;当设备出现缺陷和故障时,应缩短监测周期。在确定设备监测周期时,应遵守以下原则; 1)安装设备或大规模维修后的设备运行初期,周期要短(如每天监测一次),待设备进入稳定运行期后,监测周期可以适当延长。 2)检测周期应尽量固定。 3)对点检站专职设备监测,多数设备监测周期一般可定为7至14天;对接近或高于3000转/分的高速旋转设备,应至少每周监测1次。 4)对车间级设备监测,监测周期一般可定为每天1次或每班1次。 5)实测的振动值接近或超过该设备报警标准值时,要缩短监测周期。如果实测振动值接近或超过该设备停机值,应及时停机安排检修。如果因生产原因不能停机时,要加强监测,监测周期可缩短为1天或更短。 3 设备振动监测信息采集 3.1 振动监测参数的选择 对于超低频振动,建议测量振动位移和速度;对于低频振动,建议测量振动
轴流式风机失速原因分析及处理 摘要:本文根据福州发电公司600 MW 机组一次风机失速现象, 分析了造成失因, 并通过对失速前后风机运行参数的分析比对, 提出了相应 的预防和处理措施。希望多我厂#3机吸风机失速处理提供参考。 关键词:轴流式风机; 一次风机; 失速; 叶轮; 叶片 1 轴流风机的失速及其危害 图1 为轴流风机的性能曲线, 它由失速界线分为两个区域。在失速线的右下方为稳定运行区域, 在失速线的左上方为不稳定工作区域即 失速区域。当轴流式风机进入到不稳定区运行时, 在轴流风机叶轮的环形叶栅上将产生一个到数个 失速区, 且这些失速区会沿 着与叶轮旋转相反的方向在 叶片间传递, 称为旋转失速。 失速是由于叶片吸力面 发生了附面层分离( 脱流) , 使叶片产生的升力突减所致。失速会造成流道的堵塞, 并使叶片前后的压力发生变化, 对轴流风机的安全运行是一个威胁。在旋转失速情况下, 脱流区依次经过每个叶片, 叶片每遇一次失速就会受到一次激振力的
作用, 从而使叶片受到交变力的作用, 叶片的动应力增加, 致使叶片 发生疲劳损坏。若此交变力的频率与叶片自振频率合拍, 则将使叶片产生共振, 造成叶片折断。 2 风机失速的原因 ( 1) 风机在一定的动叶角下运行, 如果由于某种原因, 母管风压 突升, 风机流量下降, 这样在动叶角度还未发生变化之前, 压力迅速 攀升, 以致于超出失速线而进入失速区运行。对于并联运行的2 台风机, 如果其中一台动叶调节性能不好, 这台风机就有可能先失速。 ( 2) 风机正常运行中流量异常降低、一次风压突升都可能导致风 机失速。在受到外部突发因素的影响下, 风机流量极可能落在风机特性曲线的驼峰段, 故极易发生风机失速。 ( 3) 风机出口挡板销子脱落或断裂等原因导致其突然关闭或部分 关闭, 动叶调节未能跟上压力的突变, 在压力波动及动叶自动调整过 程中, 造成并列运行的其中一台风机失速。 ( 4) 变负荷过程中由于调节失灵或误操作致使2 台风机风量、风压严重不平衡而失速。 ( 5) 风机出入口风道堵塞, 如暖风器或空预器严重积灰, 两侧空 预器积灰或堵灰情况不一致, 在一次风系统有轻微扰动的情况下, 就 可能造成阻力大的一侧风机失速。
1.第1题 多维数组之所以有行优先顺序和列优先顺序两种存储方式是因为( )。 A.数组的元素处在行和列两个关系中 B.数组的元素必须从左到右顺序排列 C.数组的元素之间存在次序关系 D.数组是多维结构,内存是一维结构 您的答案:A 题目分数:2 此题得分:2.0 2.第2题 3个结点可构成( )个不同形态的二叉树。 A.2 B.3 C.4 D.5 您的答案:D 题目分数:2 此题得分:2.0 3.第3题 下列排序算法中,当初始数据有序时,花费时间反而最多的是( )。 A.起泡排序 B.希尔排序 C.堆排序 D.快速排序 您的答案:D 题目分数:2 此题得分:2.0 4.第4题 要将现实生活中的数据转化为计算机所能表示的形式,其转化过程依次为( )。 A.逻辑结构、存储结构、机外表示 B.存储结构、逻辑结构、机外表示
C.机外表示、逻辑结构、存储结构 D.机外表示、存储结构、逻辑结构 您的答案:C 题目分数:2 此题得分:2.0 5.第5题 下列有关线性表的叙述中,正确的是( )。 A.元素之间是线性关系 B.线性表中至少有一个元素 C.任一元素有且仅有一个直接前趋 D.任一元素有且仅有一个直接后继 您的答案:A 题目分数:2 此题得分:2.0 6.第6题 若要在单链表中的结点*p之后插入一个结点*s,则应执行的语句是( )。 A.s-> next=p-> next; p-> next=s; B.p-> next=s; s-> next=p-> next; C.p-> next=s-> next; s-> next=p; D.s-> next=p; p-> next=s-> next; 您的答案:A 题目分数:2 此题得分:2.0 7.第7题 栈和队列都是( )。 A.限制存取位置的线性结构 B.顺序存储的线性结构 C.链式存储的线性结构 D.限制存取位置的非线性结构 您的答案:A 题目分数:2 此题得分:2.0
现代高速列车用旋转类设备机械故障预判技术研究 摘要介绍了旋转类设备机械故障诊断的意义及其理论基础。以NR6317ASW-02型牵引电机冷却风机为例论证了诊断技术的可行性。 关键词旋转机械;故障诊断;离心通风机;噪声 Abstract this paper introduces the significance of rotating machinery fault diagnosis such equipment and its theoretical basis.NR6317ASW - 02 type traction motor cooling fan for example demonstrates the feasibility of diagnosis technology. Key words rotating machinery;Fault diagnosis;Centrifugal fan;noise 引言 旋转类设备机械故障预判技术是随着現代工业大生产的发展而发展起来的一项设备诊断技术。它是研究设备运行中或停机时基本不拆卸的情况下,掌握设备的运行状态,判定设备是否存在故障及故障严重程度和状态,预测设备可靠性和寿命,并提出解决方案的技术。对旋转类设备进行诊断包括对设备的性能进行诊断和对设备的故障进行预判两方面内容。随着我国高铁技术的迅猛发展及大批量的高速列车投入运营,高速列车用旋转类设备的正常工作是保障高速列车正常运营的关键设备,对这些设备开展性能监测与故障预判工作,具有重要的意义。 1 现实要求 当前我国对该类设备的维护仍采用传统的计划、定期维修。而这种方法带有很大的盲目性,设备有无故障、故障类型、故障部位及故障程度难以准确把握;另外,由于良好部位的反复拆卸,机械性能往往不理想,甚至低于检修前;易造成设备过修或欠修,设备的故障率无法掌控,从而影响EMU的正常行车秩序。故障诊断仪器的广泛应用,使对机械设备的维护由计划、定期检修走向状态、预知检修变为现实,使机械设备的维护方式发生了根本性革命。使得能够及时准备维修部件,安排维修计划,克服了定期维修带来的不必要的经济损失和设备性能的下降;完善的诊断能力可准确指出故障类型和故障部位,避免维修的盲目性,使监测简单易行,大大缩短了维修工期;完善的设备管理软件,又可使EMU设备管理自动化。由此可见,状态检测给EMU检修带来的经济效益是十分显著的[1]。 2 旋转类设备机械故障诊断技术理论基础 旋转机械的主要功能是由旋转部件来完成的,转子是其最主要的部件。旋转机械常见的故障表现主要为异常噪声及异常振动,其噪声信号从幅域、频域和时域反映了机器的故障信息。因此,了解旋转机械在故障状态下的异常噪声,对于监测机器的运行状态和提高诊断故障的准确率都非常重要。利用噪声检测系统对
若某计算机的主频为800MHz,每个CPU周期平均包含4个主频周期,每个指令周期平均有3个CPU周期,问: (1)该机平均指令的执行速度为多少MIPS(百万条指令每秒)? (2)若主频提高到1000MHz,每个CPU周期平均包含2个主频周期,采用流水线方式,每个指令周期平均为个CPU周期,则平均指令的执行速度又是多少MIPS? 答案: 解:(1)因为机器主频为f=800MHz,所以主频周期T=1/(800×106) =(μs), 每个CPU周期平均包含4个主频周期,所以CPU周期T CPU=4 T=4×(μs)=(μs) 指令周期T 指令 =3 T CPU=3×=(μs) 则指令的执行速度V1=1/ T指令=1/ (μs) =(MIPS) (或800÷(4×3)= (MIPS) ) (2)1000÷(2×)= (MIPS) 设机器字长为8位(运算时为9位),已知二进制数X=-101101,Y=100110, 试用双符号位补码求X+Y和X-Y的值,要求写出计算机中的运算步骤,并指 出是否有溢出。 答案: [X] 补=1 [Y] 补 =000100110 [-Y] 补 =0
[X] 补 1 + [Y] 补 000100110 1 (无溢出) [X] 补 =1 + [-Y] 补 =0 1 所以 [X+Y] 补 =1 X+Y=-000111 [X-Y] 补 =1 X-Y=-1010011 一个32位的微处理器,它有16位外部数据总线,总线的时钟频率是40MHz,假定一个总线事务的最短周期是4个时钟周期,问这个处理器的最大数据传输率是多少?如果将数据总线的宽度扩展为32位,那么处理器的最大数据传输率提高到多少?这种措施与加倍外部总线时钟频率的措施相比,哪种更好? 一种单地址指令格式如下所示,其中I为间接特征,X为寻址模式,D为形式地址。I,X,D组成该指令的操作数有效地址E。设R1为变址寄存器,R2为基址寄存器,PC为程序计数器,请写出下表中各种寻址方式名称。 OP I X D 寻址方式 名称 I X有效地址E 立即寻址 0 00 E=D 相对寻址 0 01 E=(PC)+D 变址寻址 0 10 E=(R)+D 寄存寻址 0 11 E=(R)+D,D=0直接寻址 1 00 E=(D) 相对间接寻址 1 01 E=((PC)+D)变址间接式 1 10 E=((R)+D) 寄存器间接寻址 1 11 E=((R)+D),D=0 (1)立即寻址 (2)相对寻址 (3)变址寻址 (4)寄存寻址 (5)直接寻址 (6)寄存器间接寻址
在无头结点的双链表中,指针P所指结点是第一个结点的条件是____。 答案: p-> prior==NULL 某无向图有28条边,则其顶点数最少为____。 答案: 8 在顺序表中做插入操作时首先检查____。 答案: 上溢或表满 查找表的逻辑结构是____。 答案: 集合 运算定义在逻辑结构上,算法定义在____结构上;运算指出“做什么”,算法指出____。 答案: 储存;怎么做 深度为k的二叉树,叶子数至多为____,叶子数至少为____。 答案: 2k-1、1 数组A[1..8][1..10]中,每个元素占3个单元,从首地址SA开始存放,若该数组按列存放,则元素A[8][5]的地址是____ 答案: SA+117 在150个结点的有序表中二分法查找,不论成功与否,键值比较次数最多为____。 答案: 8 下面程序段的时间复杂性为____。 for(i=0;i< n;i++) for(j=0;j< 10;j++) A[i][j]=0; 答案: O(n) 带头结点的单链表L为空的判定条件是____。 答案: L-> next==NULL n(≥1)个顶点的强连通图至少____条边,最多____条边。 答案: n、n(n-1) 排序算法的稳定性是指____。 答案: 对相同关键字排序前后相对位置不变 对400个结点的完全二叉树,度为1的结点数为____。 答案: 0 算法满足的五个重要特性是:____、____、____、输入、输出;其中区别于程序的地方是____。 答案: 有穷性、确定性、可行性;有穷性。
散列表中要解决的两个主要问题是:____、____。 答案: 散列函数的构造、冲突的处理 设循环链队列的长度为n,若只设尾指针,则出队和入队的时间复杂度分别是____和____。 答案: O(1)、O(1) 头指针为F、尾指针为R、带头结点的链队列为空的条件是____。 答案: R==F 在带头结点的单链表L中,若要删除第一个结点,则需执行下列三条语句: ____;L-> next=p-> next;delete p; 答案: p=L-> next 在邻接矩阵和邻接表上对图进行BFS或DFS遍历时,时间复杂性分别为____、____。 答案: O(n2)、O(n+e) 图的DFS遍历类似树的____遍历,是其推广。 答案: 先根 树的三种主要的遍历方法是:____、____和层次遍历。 答案: 先根、后根 n个结点的二叉链表中,指针总数为____个,其中____个指针为空。 答案: 2n、n+1 对长度为100的顺序表,在等概率情况下,查找成功时的平均查找长度为____,在查找不成功时的平均查找长度为____。 答案: 50/2、100(或101) 从n个结点的二叉排序树中查找一个元素,平均时间复杂性大致为____。 n) 答案: O(log 2 对广义表L=((a,b),c,d)进行操作head(tail(L))的结果是:____。 答案: c 非空单循环链表L中结点*p是尾结点的条件是____。 答案: p-> next==L 对n个顶点和e条边的无向图,采用邻接矩阵和邻接表表示时,求任一顶点度数的时间复杂性分别为____和____。 答案: O(n)、O(e/n)
机械设备振动标准 1 设备振动测点的选择与标注 1.1 监测点选择 测点最好选在振动能量向弹性基础或系统其他部分2进行传递的地方。对包括回转质量的设备来说,建议把测点选在轴承处或机器的安装点处。也可以选择其他的测点,但要能够反映设备的运行状态。在轴承处测量时,一般建议测量三个方向的振动。水平方向标注为H,铅垂方向标注为V ,轴线方向标注为A,见图6-1。 图6-1 监测点选择 图6-2 在机器壳体上测量振动时,振动传感器定位的示意图
1.2 振动监测点的标注(1)卧式机器 这个数字序列从驱动器非驱动侧的轴承座赋予数字001 开始,朝着被驱动设备,按数字次序排列,直到第一根轴线的最后一个轴承。在多根轴线的(齿轮传动)机器上,轴承座的次序从驱动器开始,按数字次序继续沿着第二根轴线到被驱动器往下排列,接着再沿着第三根轴线往下排列,直到机组的末端为止。常见的几种标注方法见图6-3 ~6-5 。 图6-3 振动监测点的标注 图6-4 振动监测点的标注 (2)立式机器遵循与卧式机器同样的约定 1.3 现场机器测点标注方法机壳振动测点的标注可以用油漆标注(最简单的一种方 法),标注大小与传感 器磁座大小相似;也可以在机壳上粘贴钢盘来标注振动测点,最好采用后一种方法标
注。采用钢盘时,机壳要得到很好的处理。钢盘规格为厚度5mm,直径 30mm, 用强度较好的粘接剂粘接,以保证良好的振动传递特性。 2 设备振动监测周期的确定振动监测周期设置过长,容易捕捉不到设备开始劣化信息,周期设置过短,又增加了监测的工作量和成本。因此应根据设备的结构特点、传动方式、转速、功率以及故障模式等因素,合理选定振动监测周期。当设备处于稳定运行期时,监测周期可以长一些;当设备出现缺陷和故障时,应缩短监测周期。在确定设备监测周期时,应遵守以下原则; 1)安装设备或大规模维修后的设备运行初期,周期要短(如每天监测一次),待设备进入稳定运行期后,监测周期可以适当延长。 2)检测周期应尽量固定。 3)对点检站专职设备监测,多数设备监测周期一般可定为7 至14 天;对接 近或高于3000转/ 分的高速旋转设备,应至少每周监测 1 次。 4)对车间级设备监测(指运行人员),监测周期一般可定为每天1 次或每班1 次。 5)实测的振动值接近或超过该设备报警标准值时,要缩短监测周期配件;如果实测振动值接近或超过该设备停机值,应及时停机安排检修;如果因生产原因不能停机时,要加强监测,监测周期可缩短为 1 天或更短。 3 设备振动监测信息采集 3.1 振动监测参数的选择对于超低频振动,建议测量振动位移和速度;对于低频振动, 建议测量振动 速度和加速度;对于中高频振动和高频振动,建议测量振动加速度。说明如下:(1)设备振动按频率分类。根据振动的频率,设备振动可以分为以下几种:1)超低频振动,振动频率在10Hz 以下。 2)低频振动,振动频率在10Hz 至1000Hz。 3)中高频振动,振动频率在1000Hz至10000Hz。 4)高频振动,振动频率在10000Hz以上。 (2)位移为峰峰值;速度为有效值;加速度为有效值;有时根据需要,速度和加速度还要测量峰值。 3.2 振动监测中的几个“同” 为保证测量结果的可比性,在振动监测中要注意做到以下 几个“同” : 1 )测量仪器同; 2 )测量仪器设置同; 3 )测点位置、方向同; 4 )设备工况同; 5 )背景振动同。并尽量由同一个人测量。 3.3 振动数据采集应严格按监测路径和监测周期对设备进行定期监测。采集设备振动数据时,通常还需要记录设备的其他过程参数,如温度、压力和流量等,以便于比较和趋
消除递归不一定需要使用栈。 答案:正确 在开散列表中不会出现堆积现象。 答案:正确 在链栈上进行进栈操作时,不需判断栈满。 答案:正确 算法的正确性,一般不进行形式化的证明,而是用测试来验证。 答案:正确 顺序表不需存放指针,链表要存放指针,故链表的存储空间要求总是比顺序表大。 答案:错误 如果n个顶点的无向图有n条边,则图中肯定有回路。 答案:正确 图G的生成树T是G的子图。 答案:正确 数组的基本运算有读、写、插入、删除等。 答案:错误 不管树的深度和形态如何,也不可能构造出一棵有100个结点的哈夫曼树。 答案:正确 如果根结点的左子树和右子树高度差不超过1,则该二叉树是平衡二叉树。 答案:错误 排序的目的是为了方便以后的查找。 答案:正确 以中序方式遍历一个堆,则得到一个有序序列。 答案:正确 二叉树中可能所有结点的度都小于2。 答案:正确 顺序表可以按序号随机存取。 答案:正确 在二叉排序树中,即使删除一个结点后马上再插入该结点,该二叉排序树的形态也可能不同。答案:正确 队列在使用中必须设置两个指针,分别指向真正的队头和队尾的位置。 答案:错误 数据的逻辑结构和运算集组成问题的数学模型,与计算机无关。
对称矩阵压缩存储后仍然可以随机存取。 答案:正确 有向图中顶点i的出度等于邻接矩阵中第i行中1的个数;入度等于第i列中1的个数。 答案:错误 树和森林都可转化为二叉树,故对给定的二叉树,不能区分是由树还是森林转换来的。 答案:错误 循环队列中入队和出队的节点位置可出现在数组的任一端,已不满足“一端进另一端出”的要求,故实际上已不是队列了。 答案:错误 顺序查找法不仅可用于顺序表上的查找,也可用于链表上的查找。 答案:正确 有向图中边数等于邻接矩阵中1的个数;也等于邻接表中的边表结点数。 答案:正确 直接插入排序是稳定的,而Shell排序就是调用若干趟直接插入排序,故也是稳定的。 答案:错误 基数排序不需进行关键字间的比较,故执行时间比基于比较的排序方法要快。 答案:错误 由二叉树的先根和后根序列可以唯一确定该二叉树。 答案:错误 不论数据如何组织,分别在10000个结点和10个结点的查找表中进行查找,前者的平均查找长度肯定比后者大。 答案:错误 在线索二叉树上,求结点的(遍历)前趋和后继时可利用线索得到,即不必进行遍历了。 答案:错误 单链表中取第i个元素的时间与i成正比。 答案:正确 广义表不仅是线性表的推广,也是树的推广。 答案:正确 拓扑排序可以分析某工程能否顺利进行。 答案:正确 哈夫曼树中不存在度为1的结点。 答案:正确 在数据结构中,算法的空间耗费包括代码和数据两部分。
高速旋转机械的振动频谱分析 一、前言我公司绝大多数关键设备为旋转机械设备,如各类风机、空压机、大型电机等。设备的日常维护和安装调试过程中,经常遇到因剧烈振动而无法正常生产的情况,而振动的原因错综复杂,仅靠耳听、手摸的原始方法,很难全面准确的分析判断故障的原因。采用先进的设备状态检测和故障诊断技术,通过振动检测掌握各类设备在一定时期的运行状态,为从事设备维护、安装、调试的工程技术人员提供一套完整的设备运行状态资料,根据这些资料进行数据分析,可以准确的分析判断故障原因,缩短检修工期,合理的安排关键设备的预防维修计划,从而避免因突发性设备故障而造成的经济损失,确保产生的顺利进行。 二、采用故障诊断技术处理设备故障的几个实例 1.氧气厂2#DA350一61型空压机组振动故障的处理氧气厂DA350~61型空压机是制氧机的动力设备,机组进行是否正常,直接关系到第一炼钢厂的生产,是总公司的关键设备。1999年4月份,该机组借第一炼钢厂停产机会,解体大修,组装后试车时,机组振动超标,无法正常运行,严重影响检修工期。如解体检查至少需要3天的时间,况且对能否检查到故障点也没有十分把握。于是我们利用NG 一8902多通道数据采集故障诊断系统,对该机组进行了全面的测试。(1)空压机组的测点布置如图1所示。(2) 机组的测试情况(取振动值最大的方向)见表1 测点振动值,mm/s 特征频率,Hz 1 S(水平)0.12 50 2 S(水平)0.14 50 3 C(垂直)0.344 146 4 C(垂直)0.776 146 5 C(垂直)0.28 146 6 C(垂直)0.577 146 7 C(垂直)2.79 146 8 C(垂直)8.25 146 由表1可见,1#、2#、3#、4#、5#、6#测点,振动情况良好。7#、8#测点振动速度超标,8#测点振值8.25mm/s,严重超标,7#、8#测点的轴向振动谱图如图2、图3又测量了7#、8#测点的振动加速度,见表2(取振动值最大的方向)。测点振动速度值,mm/s 特征频率,Hz 8#瓦S(水平)5.67 2487 C(垂直)12.67 2625 Z(轴向)14.61 2625 7#瓦 S(水平)1.58 438 C(垂直)1.66 146 Z(轴向)11.24 2625 根据以上的振动测量及频谱图分析,空压机组的振动故障分析如下:3#、4#、5#、6#测点振动速度良好,说明大小齿轮运行状态正常,振源不在大小
TTL电路及输入A、B、C波形如图所示,写出其输出逻辑表达式,并画输出Y的波形图。 TTL电路及输入A、B、C波形如图所示,写出输出逻辑表达式,并画出输出Y的波形图。 答案: TTL电路及输入A、B波形如图所示,写出其输出逻辑表达式,并画输出Y的波形图。 答案:
如图所示电路是边沿D触发器,要求:(1)写出触发器的次态逻辑表达式;(2)给出CP和A的波形如下,画出触发器的状态波形。设触发器初始状态为0。 答案: 译码器74LS138和与非门构成的逻辑电路如图所示。请写出最简的输出逻辑表达式。 答案:
同步十六进制计数器74LS161构成电路如下图所示。要求:画出电路的状态转换图,说明该电路的逻辑功能。 答案: 分析如图所示电路,要求:(1)写出输出Y的逻辑表达式;(2)由逻辑表达式列写真值表;(3)说明电路功能。 答案:
图为用译码器74LS138和与非门构成的逻辑电路。请写出其逻辑表达式,并将其化简为最简的与或式。 答案: 二个JK触发器构成的时序电路如下图所示。要求:(1).写出时钟方程和状态方程;(2).画对应的波形图;(3)说明电路功能。设触发器初始状态均为0。
答案: 根据如图所示ROM,写出Y1、Y2的逻辑表达式,并将Y1、Y2化简为最简式。 答案: 根据如图所示ROM, (1)ROM的存储容量是:; (2)写出Y1、Y2的逻辑表达式,并将Y1、Y2化简为最简逻辑表达式。
答案: 解: (1)ROM的存储容量是: 4×2 ; (2)写输出逻辑表达式并化简函数: 三个D触发器构成时序电路如下图所示。要求:写出状态方程,状态转换图,说明该时序电路的逻辑功能。设触发器初始状态Q1 Q2 Q3 =110 答案: 如图所示电路是边沿T触发器,要求:(1)写出触发器的次态逻辑表达式;(2)给出CP的波形如下,画出触发器的状态波形。设触发器初始状态为0。 答案:
旋转机械振动故障诊断的图形识别方法研究 集团公司文件内部编码:(TTT-UUTT-MMYB-URTTY-ITTLTY-
旋转机械振动故障诊断的图形识别方法研究我国近年来的旋转机械逐渐发展为大型机械,在这种发展趋势下人们开始重视对振动故障的诊断方法进行研究,在深入研究后探索出了一系列用人工识别图像来实现旋转机械振动故障诊断的方法。本文主要分析了旋转机械振动故障的机理、故障的特点以及几种图形识别方法。经过多种试验证明图形识别方法的科学可行性,值得在今后的实际操作中得到运用和发展。 对于旋转机械在工作状态当中会发生振动,从而由振动产生的各种信号,信号会形成一些参数图形,通过对这些参数图形的研究与分析,我们可以实现对器械运行过程中的日常管理和保护。这也是目前应该采用的设备管理方式。而在实际操作过程中,图形识别技术并没有深入到工作当中。这种手段没有被利用于诊断旋转机械故障的原因是提取出明显的图形特征在技术上具有一定的困难,而且对于图形具体特征的描述也具有很大的挑战,是否能够将图形所呈现出的特征准确地表述出来是图形识别技术在旋转机械振动故障诊断方面的一个限制性因素。诊断旋转机械振动故障的原则 采集诊断依据
被诊断的机械表面所能表现出的所有相关信息都能够作为旋转振动机械故障诊断的有效依据。这些信息在机械运行的过程中能够通过传感器传递给人们。对旋转机械振动故障的诊断是否准确,一个重要的因素就是收集到的有关信息是否真实可靠,依据信息是否准确真实的决定性因素是传感器的品质,传感器质量如何、感应是否灵敏以及工作人员的直观判断都是决定信息准确性的重要衡量标准。 对采集的信息进行处理和研究 从传感器和工作人员两方面收集到的依据信息通常是混乱无序的,不能明显的看出其特点,这就导致了无法准确地对故障进行判断,这就要求我们在成功收集信息之后要及时对大量信息进行筛选和处理,目前普遍采用专业的机器来对这些信息进行分析和研究以及进一步的转换,经过这些处理之后所得到的信息要保证具有至关、价值性强等特点。 对故障进行诊断 对旋转机械振动故障诊断方面对工作人员的要求比较高,要求其具有过硬的理论知识功底以及丰富的实际工作经验。工作人员应该充分了解机械方面的相关知识,熟练掌握机械的维修要点以及安装过程。正确的对机械振动故障进行诊断,并且能够对故障的发展形势进行预想,只有这