基于HyperStudy和隐式参数化模型的A柱综合性能
优化
张继游1, 2,彭鸿1, 2,门永新1, 2,赵福全1, 2
1. 吉利汽车研究院,杭州,311228;
2. 浙江省安全控制技术重点实验室,杭州,311228
摘要:本文在HyperStudy优化平台的基础上,采用参数化技术和优化技术,集成了OptiStruct等求解器,对某车型A柱的综合性能(刚度、屈曲和压溃性能)进行优化,最后获得了满足设计指标并且单位长度质量最小的设计方案。
关键字:HyperStudy,OptiStruct,隐式参数化模型,A柱,优化
0 引言
主断面截面特性直接影响梁结构的刚度性能,进而影响到车身的整车刚度指标,因此主断面分析在白车身结构设计中具有重要意义。传统的主断面分析根据主断面的力学特性来进行车身刚度的灵敏度分析,从而优化车身刚度,研究的范畴主要是车身的刚度性能指标[1-3]。本文则采用全新的方法来考察主断面的综合性能。在某新车型的前期开发过程中,由于车身外形发生改变,设计人员开发了全新的A柱截面,为了达到对标车型的A柱截面综合性能,需要对该A柱截面进行分析和优化。根据该分析需求,本文的优化方案如下:首先,根据A 柱截面的几何结构建立A柱的参数化模型;之后将参数化模型生成的有限元模型导入HyperMesh中,建立刚度分析、屈曲分析和压溃分析三个工况,前两个工况的求解器为OptiStruct,第三个工况的求解器为相关非线性求解器;第三步,在HyperStudy中建立优化目标、约束条件和设计变量,集成参数化工具(SFE CONCEPT)和求解器(OptiStruct 等),经过两轮DOE分析,获取优化结果。
1 模型描述
1.1隐式参数化模型简介
SFE CONCEPT根据车身结构初始状态的有限元模型或几何模型,建立几何结构一致的参数化模型,该模型有两个功能:第一,模型结构具有全参数化功能,几何结构的位置、尺寸和形状等可以任意改变,能记录改变的过程并保存为设计变量;第二,几何结构发生改变的参数化模型可以生产几何结构相同并满足网格质量要求的有限元模型。基于上述功能,SEF CONCEPT成为车身结构形状优化的有利工具。
1.2 A柱隐式参数化模型
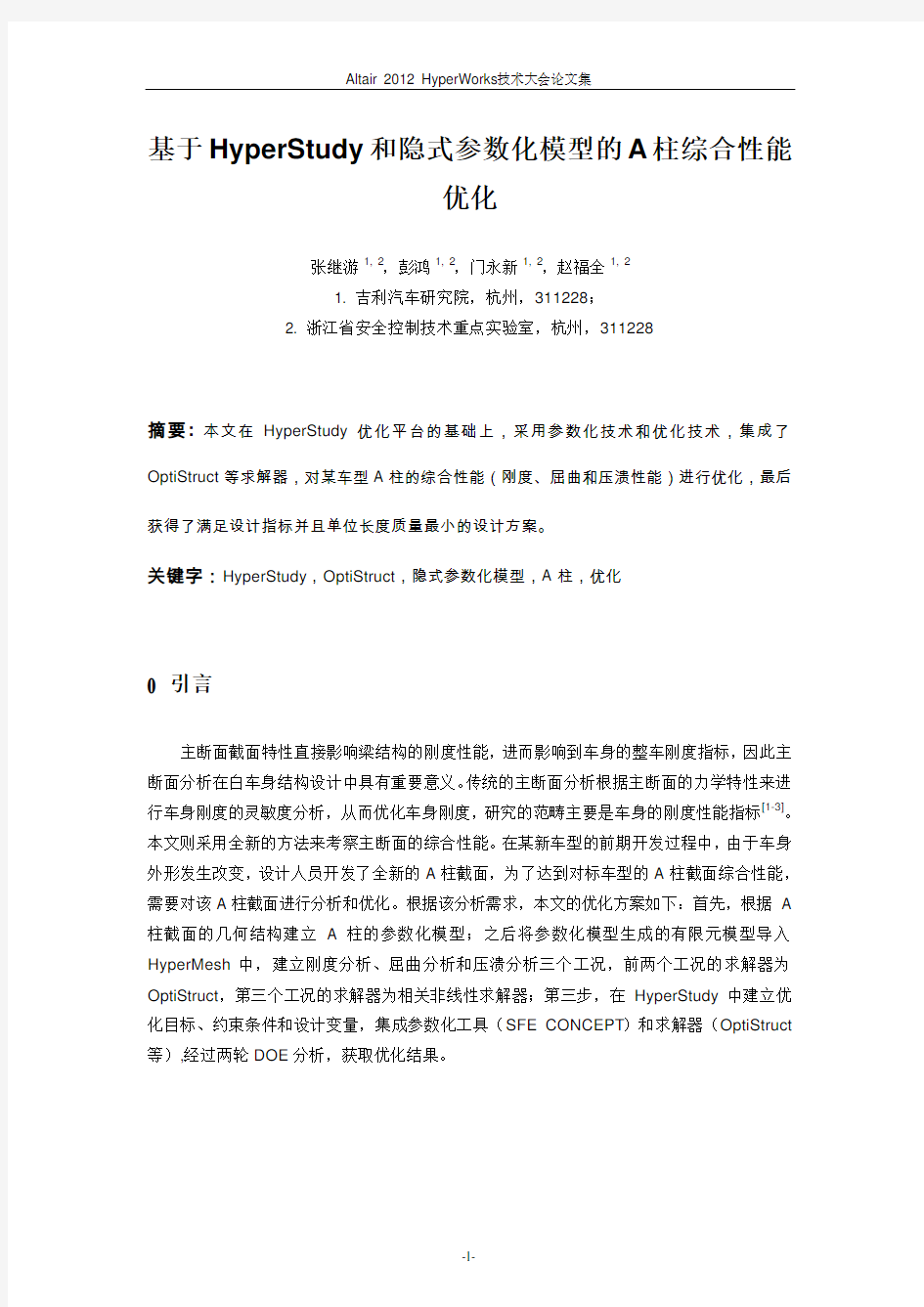
利用SFE CONCEPT,通过基点(Points)→基线(Lines)→截面(Sections)→梁(Beams)的建模步骤,将A柱截面拉长300mm,并赋予材料和性能属性,生成A柱隐式参数化模型,如图1所示。该参数化模型可以同时生成NASTRAN格式和DYNA格式的有限元模型。
图1 A柱参数化模型
1.3 分析工况
本文中,A柱的综合性能包括A柱的刚度性能、屈曲性能和压溃性能。前两者求解器为HyperWorks的OptiStruct,压溃性能求解器为相关非线性软件。三个性能的分析工况如下所示:
(1)刚度分析工况:
A柱末端赋予全自由度约束,采用RBE2将A柱前端与对应的截面中心连接,建立三个刚度工况(1.垂直刚度,Fy=1000N; 2.侧向刚度,Fz=1000N; 3.扭转刚度,Mx=100kN·m),求解出对应的位移或转角,获取相应的刚度值,如图2(1)所示。
(2)屈曲分析工况:
A柱末端赋予全自由度约束,采用RBE2将A柱前端与对应的截面中心连接,在原点沿X方向施加Fx=10kN,求解出A柱的屈服载荷,如图2(2)所示。
(3)压溃分析工况:
A柱末端赋予全自由度约束,刚性墙以0.25m/s的速度沿X方向挤压A柱50mm,求出A柱的最大挤压力和平均挤压力,如图2(3)所示。
三个工况的计算结果如表1所示。由表1可知,车型的A柱的垂直刚度、侧向刚度、屈曲载荷低于对标车型,扭转刚度和压溃性能高于对标车型。
(1)刚度分析工况(2)屈曲分析工况(3)压溃分析工况
图2 分析工况
表1 A柱综合性能对比
2 A柱综合性能优化
2.1 优化目标与设计变量
本文优化的目标是A柱的单位长度质量最小,约束条件为刚度、屈曲和压溃性能不低于对标车型,设计变量包括3个形状变量(DV01、DV02、DV03)和3个厚度变量(DV04、DV05、DV06)。A柱综合性能优化的设计变量与约束条件如下表2所示,其中DV01为A 柱圆管的半径,DV02为A柱圆管的位置,DV03为A柱内板的位置,DV04为A柱圆管的
厚度,DV05为A柱加强板Ⅰ的厚度,DV06为A柱加强板Ⅱ的厚度。
2.2 DOE分析
(1)第一轮DOE分析
第一次DOE分析选择上述6个变量(DV01-DV06)为优化参数,采用Latin Hypercube 方式,建立18个样本的DOE,获取的DOE相关性分析结果如图3所示。由图3可知,DV01对Stiffness_Fz、Stiffness_Fy和Stiffness_Mx的贡献度均高于其他变量,且与这些输出结果呈负相关关系;DV06对MAX_Force、EIG_Force、MAX_Ave_Force和Mass_L的贡献度均高于其他变量,且与这些输出结果呈正相关关系;DV02、DV03、DV05对各输出结果的贡献度较小,且均低于其他变量。所以,在第2轮DOE分析中,DV02、DV03、DV05将不参与优化计算。
表2 设计变量与约束条件
图3 第1轮DOE分析结果
(2)第二轮DOE分析
第二轮DOE分析的设计变量为DV01、DV04和DV06,采用Latin Hypercube方式,建立30个样本的DOE。以此DOE为基础,采用Least Squares Regress方式,创建响应面模型。各变量的响应面精度对比如表3。由表3可知,各输出量的响应面精度R^2_Press 均高于0.99,由此可知,响应面精度高,可作为优化的计算基础。Max_Eva_Force的残差图和响应面模型如图4和图5所示。
表3 响应面精度
图4 Max_Eva_Force的残差图图5 Max_Eva_Force的响应面模型2.3 优化计算
在响应面模型的基础上,采用Genetic Algorthm算法,求解Mass_L的全局最优解,将优化后的设计变量导入原模型计算,获得的分析结果与响应面模型优化结果的误差如表4所示。如图6所示,最终的优化结果:当圆管的直径为21.8mm (初始值为18mm) 、厚度为2.3mm (初始值为2.0mm) ,加强板Ⅰ的板厚为1.5mm(初始值为1.8mm)时,Mass_L 达到满足各约束条件的最小值4.72kg/m (初始值为4.54kg/m) 。
表4 仿真模型与响应面模型对比
(1)初始的A柱截面(2)优化后的A柱截面
图6 优化结果
3 结论
本文在HyperStudy优化平台的基础上,采用参数化技术和优化技术,集成了OptiStruct 等求解器,对某车型A柱的综合性能(刚度、屈曲和压溃性能)进行优化,最后获得了满足设计指标并且单位长度质量最小的设计方案。本文采用的优化方法有以下两个优点:(1)相对传统的主断面分析只考察截面的刚度指标,本文还考察了梁的屈曲性能和压溃性能,分析的范围更加广泛,同时设计变量中包括了形状设计变量,为设计人员提供了更大的设计空间;
(2)本文采用了HyperWorks系列的多款产品(HyperStudy、HyperMesh、HyperView 和OptiStruct),减少了数据之间的传递损失,从而降低了用户的使用成本,并提高了产品的研发效率。
4 参考文献
[1] 肖杰, 雷雨成, 张健,等.车身主断面几何特性对白车身刚度影响的研究.汽车技术, 2007,
(02):15-18.
[2] 陈昌明, 陈家骐, 姚乾华.基于ANSA环境的车身主断面有限元分析.山东交通学院学报, 2009, 17(01):1-4.
[3] 姚乾华, 陈昌明.基于车身主断面力学特性的灵敏度分析.车辆与动力技术, 2007, 108:36-42.
Optimization of Multi-disciplinary Properties of A-pillar Based on HyperStudy and Implicit
Parametric Model
Zhang Jiyou Peng Hong Men Y ongxin Zhao Fuquan
Abstract: Based on parametric technology and optimization technology, this paper uses HyperStudy platform to integrate OptiStruct and other solvers, and optimize multi-disciplinary properties (stiffness, buckling and crushing performance) of A-pillar of a passenger car, and finally the optimum design, which met the design specifications and had minimum mass, is obtained.
Keywords: HyperStudy, OptiStruct, Implicit Parametric Model, A-pillar, Optimization
SolidWorks的参数化功能有多种实现方式,本文详细介绍了利用Excel表格驱动SolidWorks模型的方法:通过Excel输入参数,利用Excel表格ActiveX控件、方便的数据计算能力,结合SolidWorks方程式及宏功能,实现对SolidWorks模型尺寸修改及更新。 参数化设计方法就是将模型中的定量信息变量化,使之成为任意调整的参数。对于变量化参数赋予不同数值,就可得到不同大小和形状的零件模型。 用CAD方法开发产品时,产品设计模型的建立速度是决定整个产品开发效率的关键。如果该设计是从概念创意开始,则产品开发初期,零件形状和尺寸有一定模糊性,要在装配验证、性能分析之后才能确定,这就希望零件模型具有易于修改的柔性;如果该设计是改型设计,则快速重用现有的设计数据,不啻为一种聪明的做法。无论哪种方式,如果能采用参数化设计,其效率和准确性将会有极大的提高。 在CAD中要实现参数化设计,参数化模型的建立是关键。参数化模型表示了零件图形的几何约束、尺寸约束和工程约束。几何约束是指几何元素之间的拓扑约束关系,如平行、垂直、相切和对称等;尺寸约束则是通过尺寸标注表示的约束,如距离尺寸、角度尺寸和半径尺寸等;工程约束是指尺寸之间的约束关系,通过定义尺寸变量及它们之间在数值上和逻辑上的关系来表示。 在参数化设计系统中,设计人员根据工程关系和几何关系来指定设计要求。要满足这些设计要求,不仅需要考虑尺寸或工程参数的初值,而且要在每次改变这些设计参数时维护这些基本关系。即将参数分为两类:其一为各种尺寸值,称为可变参数;其二为几何元素间的各种连续几何信息,称为不变参数。参数化设计的本质是在可变参数的作用下,系统能够自动维护所有的不变参数。因此,参数化模型中建立的各种约束关系,正是体现了设计人员的设计意图。 SolidWorks是典型的参数化设计软件,参数化功能非常强大,并且实现方法多种多样。笔者今天介绍一种通过Excel表格对模型参数进行驱动的方法,其特点是充分利用Excel 表格强大的公式计算、直观的参数输入、方便的数据维护功能,来实现产品的参数化、系列化设计。如图1所示Excel表格,展示的是一个压力容器的法兰参数。表中直观地将不同法兰用不同颜色体现,并对应相同颜色块的参数。该参数采用下拉列表的方式,直接选取即可,最后只需要点击右下角的“更新法兰参数”,SolidWorks中的模型便实时得到更新。
教育与心理测量中的潜变量及其在不同模型中的应用 □王华王晓丽马永忠 日常生活中潜变量无处不在,潜变量的科学运用能检验或证伪关于潜变量的假设,潜变量所隐含的抽象度可以帮助研究者概括出一组事件或变量间的关系。这一术语在心理学中经常出现,但很少有文献探讨它的本质,尤其在心理学测量模型中出现的关于潜变量的理论性并没有得到一次彻底的完整的分析。鉴于此,有必要综述心理学中关于潜变量的不同定义并去寻找其中内在的联系,然后根据这些定义去检验一般统计模型中的潜变量及其使用范围。 一、潜变量的界定 1.局部独立性。这是定义潜变量的最普遍方式,其核心思想是有一个或多个潜变量,这些变量能使观测变量间产生联系,用方程表示为:P[Y1,Y2,…,Y k]=P[Y1|η]P[Y2|η]…P[Y k|η],(其中Y1,Y2,…,Y k是可观测的随机变量,η是潜变量(一个潜变量或潜变量向量),P[Y1,Y2,…,Y k]是观测变量的联合概率,P [Y1|η]P[Y2|η]…P[Y k|η]是条件概率),这一定义中的观测变量和潜变量可以是连续的也可以是离散的。 2.期望值。潜变量的期望值定义与经典测量理论相联系,即:T i=E (Y i),(T i指在第i个被试的真值,Y i为第i个被试的观测变量,E是对某个随机变量取期望值,相当于一个函 数)。这一等式表明,如果我们对第i 个被试作出重复测量而且被试的反 应并未受到先前反应的影响,这时 观测变量的期望值等于真值。 3.观测变量的非确定性函数。 Bentler这样定义潜变量:“在线性结 构方程系统中的某个变量,如果该 方程不能使某一变量作为观察变量 的确定函数时,那么这一变量被称 作是潜变量。”换句话说,由于我们 不能使用观察变量完全准确地确定 潜变量,因此潜变量是观测变量的 非确定性函数。 4.样本实现。样本实现的定义 可能是对潜变量最简单最直观的理 解,用样本实现可以这样对潜变量 作出定义:“潜变量是在一个既定的 样本中至少对部分观察样本不能实 现的随机或非随机变量。”该定义允 许随机变量适合于一些样本而不适 合于另一些样本,但观测变量在所 有样本中都可实现。 二、潜变量的属性 1.先验潜变量和后验潜变量。 前者是在对数据作出验证之前假设 的潜变量,后者是研究者通过数据 分析分离出来的潜变量;2.判断潜 变量是连续的、分类的、还是混合性 质的;3.模型中与潜变量有关的函 数的识别。如果识别失败意味着因 子负荷或潜变量的变异不是唯一的, 我们也不能从真参数值中辨别真 伪;4.潜变量的不确定性。这一属性 在因子分析中经常见到,通过观测 变量可以估计潜变量模型中的潜变 量值,前者是直接对潜变量产生影 响的观测变量;后者是潜变量效应 的观测变量。 三、统计模型中的潜变量 1.多元回归中的潜变量。潜变 量在多元回归方程中是这样出现 的:Y i=α+β1X i1+β2X i2+……+βk X ik+εi (这里i代表被试,Y i为第i个被试的 因变量值,α为方程截距,βk为对应 于X ik变量的回归系数,εi是第i个被 试的潜变量),研究者将εi描述为具 有三个成分的随机变量,这三个成 分为:(1)出现在所有结果中内在的 非预测的随机成分;(2)大量被忽略 但能影响Y i的变量;(3)在Y i中的随 机测量误差成分。如果忽略非随机 成分,可以将潜变量描述为:εi=εri+ εoi+εmi,其中εri,εoi,εmi分别代表三种 干扰成分,是用来解释因变量与其 预测值之间差误的非观测变量,这 一方程表明非观测变量是一个由两 个或更多潜变量组成的复合函数, 实际研究中研究者通常忽视了这些 干扰成分,而将它们等同起来。 2.有限因变量模型中的潜变量。 多元回归中的潜变量是连续的,而 |人力资源·绩效管理|JIXIAOGUANLI 90 人才资源开发2011.4
大多数非线性动力学问题一般多是采用显式求解方法,特别是在求解大型结构的瞬时高度非线性问题时,显示求解方法有明显的优越性。下面先简要对比一下隐式求解法和显示求解法。动态问题涉及到时间域的数值积分方法问题。在80年代中期以前,人们基本上采用纽曼法进行时间域的积分。根据纽曼法,位移、速度和加速度有着如下关系: u(i+1)=u(i)+△t*v(i)[(1—2p)a(i)+2p*a(i+1)] (1) v(i+1)=V(i)+△t[(1-2q)a(i)+2qa(i+1)] (2) 上面式子中 u(i+1),u(i)分别为当前时刻和前一时刻的位移,v(i+1)和V(i)为当前时刻和前一时刻的速度,a(i+1)和a(i)为当前时刻和前一时刻的加速度,p和q为两个待定参数,△t为当前时刻与前一时刻的时问差,符号 * 为乘号。由式(1)和式(2)可知,在纽曼法中任一时刻的位移、速度、加速度都相互关联,这就使得运动方程的求解变成一系列相互关联的非线性方程的求解,这个求解过程必须通过迭代和求解联立方程组才能实现。这就是通常所说的隐式求解法。隐式求解法可能遇到两个问题。一是迭代过程不一定收敛,二是联立方程组可能出现病态而无确定的解。隐式求解法最大的优点是它具有无条件稳定性,即时间步长可以任意大。 如果采用中心差分法来进行动态问题的时域积分,则有如下位移、速度和加速度关系式: u(i+1)=2u(i)-u(i-1)+a(i)(△t)^2 (3) v (i+1)=[u (i+1)-u (i-1)]/2(△t) (4) 式中u(i-1),为i -1时刻的位移。由式(3)可以看出,当前时刻的位移只与前一时刻的加速度和位移有关,这就意味着当前时刻的位移求解无需迭代过程。另外,只要将运动过程中的质量矩阵和阻尼矩阵对角化,前一时刻的加速度求解无需解联立方程组,从而使问题大大简化,这就是所谓的显式求解法。显式求解法的优点是它既没有收敛性问题,也不需要求解联立方程组,其缺点是时间步长受到数值积分稳定性的限制,不能超过系统的临界时间步长。由于冲压成型过程具有很强的非线性,从解的精度考虑,时间步长也不能太大,这就在很大程度上弥补了显式求解法的缺陷。 在80年代中期以前显式算法主要用于高速碰撞的仿真计算,效果很好。自80年代后期被越来越广泛地用于冲压成型过程的仿真,目前在这方面的应用效果已超过隐式算法。显式算法在冲压成型过程的仿真中获得成功应用的关键,在于它不像隐式算法那样有解的收敛性问题。 显式算法和隐式算法,有时也称为显式解法和隐式解法,是计算力学中常见的两个概念,但是它们并没有普遍认可的定义,下面只是我的一些理解。先看看一般对两种方法的理解和比较,
UG软件的建模与参数化技术分析 (2) 第一章简介 (2) 第二章UG建模分析 (3) 2.1实体建模 (3) 2.2特征建模 (3) 2.3自由形体建模 (4) 2.4实体特征建模 (4) 2.4.1基本体素特征建模 (5) 2.4.2扩展特征建模 (5) 2.4.3成型特征建模 (7) 2.4.4特征操作 (8) 2.5总结 (9) 第三章参数化设计 (10) 3.1参数化设计的定义【7】【8】 (10) 3.2参数化设计的类型 (11) 3.2.1基于特征的参数化设计 (11) 3.2.2基于草图的参数化设计 (13) 3.2.3基于装配的参数化设计 (14) 3.3基于Excel表格的参数化设计【4】【5】 (15) 3.4总结 (18) 参考资料 (19)
UG软件的建模与参数化技术分析 第一章简介 Unigraphics(简称UG)是全球主流MCAD 系统,是计算机辅助设计、辅助制造、辅助工程和产品数据管理(CAD/CAM/CAE/PDM)一体化的软件系统之一,应用十分广泛【1,2】。UG 基于完全的三维实体复合造型、特征建模、装配建模技术,能设计出各种各样复杂的产品模型,并且具有强大的参数化设计功能,能够很好地表达设计意图,易于修改参数化模型。另外UG 提供了完善的二次开发工具,二次开发程序可以建立起与UG 系统的链接,使用户开发的功能与UG 实现无缝集成。利用UG 二次开发技术,用户可以开发专用CAD 系统,满足实际的应用需求。 UG软件是第三代CAD系统的典范,是基于特征建模和基于约束的参数化和变量化的建模方法。为什么说UG为第三代CAD系统?【7】 第一代CAD系统主要用于二维绘图,其技术特征是利用解析几何的方法定义有关点、线、圆等图素。 第二代CAD系统主要是二维交互绘图系统及三维几何造型系统,其发展过程是从计算机辅助绘图到计算机辅助设计,从二维绘图到三维设计,进而到三维集成化设计的过程。在几何造型方面分别采用了三维线框模型、表面模型和实体模型。在实体造型上广泛采用了实体几何构造法(CSG法)和边界表示法(B-rep 法),CSG法即用简单实体(称为体素)通过集合运算交、并、差构造复杂实体的方法;B-rep法即是用物体封闭的边界表面描述物体的方法。 第三代CAD系统在建模方法上出现了特征建模和基于约束的参数化和变量化建模方法,由此出现了各种特征建模系统、二维或三维的参数化设计系统以及两种建模方法互相交叉、互相融合的系统。UG软件中参数化三维设计的核心技术便是特征建模,所以UG软件第三代CAD系统的典范,在接下来的章节将介绍三代建模方法(特征建模)相比较二代CAD的优势。
非参数回归模型
精品资料 仅供学习与交流,如有侵权请联系网站删除 谢谢2 非参数回归模型 非参数回归模型也叫多元回归模型,它是一种脱离于混沌理论的多条路段分析方法。它是对当前路段和几条相邻路段的交通流信息对当前路段进行交通流预测的单条路段分析的扩展。它不需要先验知识,只需要有足够的历史数据即可。它的原理是:在历史数据库中寻找与当前点相似的近邻,并根据这些近邻来预测下一时间段的流量。该算法认为系统所有的因素之间的内在联系都蕴含在历史数据中,因此直接从历史数据中得到信息而不是为历史数据建立一个近似模型。非参数回归最为一种无参数、可移植、预测精度高的算法,它的误差比较小,且误差分布情况良好。尤其通过对搜索算法和参数调整规则的改进,使其可以真正达到实时交通流预测的要求。并且这种方法便于操作实施,能够应用于复杂环境,可在不同的路段上方便地进行预测。能够满足路网上不同路段的预测,避免路段位置和环境对预测的影响。随着数据挖掘技术左键得到人们的认可和国内外学者的大量相关研究,使得非参数回归技术在短时交通流预测领域得到广泛应用。 非参数回归的回归函数()X g Y =的估计值()X g n 一般表示为: ()()∑==n i i i i n Y X W X g 1 其中,Y 为以为广策随机变量;X 为m 维随机变量;(Xi,Yi )为第i 次观测值,i=1,...,n ;Wi(Xi)为权函数.非参数回归就是对g(X)的形状不加任何限制,即对g (X )一无所知的情况下,利用观测值(Xi,Yi ),对指定的X 值去估计Y 值。由于其不需要对系统建立精确的数学模型,因此比较适合对事变的、非线性的系统进行预测,符合对城市交通流的预测,同时可以与历史平均模型实现优缺点的互补。 K 近邻法 Friedman 于1977年提出了K 近邻法。其并不是让所有的数据都参与预 测,而是以数据点到X 点的距离为基础,甲醛是只有离X 最近的K 个数据被用来估计相应的g(X)值。可以引入欧式空间距离d ,然后按这个距离将X1,X2,...,Xn 与X 接近的程度重新排序:Xk1,...,Xkn,取权值如下: Wki(X:X1,...,Xn)=ki,i=1,..,n 将与X 最近的前K 个观测值占有最大的权K=1,其余的观测值赋予权值k=0.最终得到应用于短时交通流预测的K 近邻法可表示为:
第十七章 LS-DYNA 的隐式求解 LS-DYNA 作为著名的显式求解程序只能求解瞬态动力问题,对于时间历程较长的静、动力问题, LS-DYNA 的显式中心差分法有它的局限性,而一些与瞬态动力分析紧密相关的问题要求LS-DYNA 也能够求解,如: 冲压成型后的回弹计算 应力初始化 冲击后常时间低频动力响应 静力分析 特征值分析 实际上从950版本开始,LS-DYNA 已增加了隐式求解功能。刚开始的应用主要在冲压成型后的回弹计算,经过960版到970版的发展,LS-DYNA 的隐式求解功能已大增强,已经能满足以上的求解需要。 17.1显式与隐式的区别: 17.1.1 LS-DYNA 显式求解: 采用中心差分方法进行显式时间积分 int n ext n n f f Ma -= ● 方程非耦合,可以直接求解(显式) ● 但需要常小的时间步保持稳定状态 ● 不需要求解刚度矩阵 ● 适合冲击、穿透等高频非线性动力响应问题 17.1.2 LS-DYNA 隐式求解: 采用Newmark 隐式时间积分
n n ext n n n Ma f f u K a M --=?+?++int 1 1 ● 对于线性问题,无条件稳定 ● 可以采用大的时间步 ● 对于非线性问题,需要一系列线性逼近(Newton-Raphson )叠代求解 ● 需要求解刚度矩阵 ● 适合静力问题、低频动力问题及特征值分析。 17.2 LS-DYNA 中隐式分析的激活及相关关键字 在LS-DYNA 中,缺省的求解是显式求解,可以通过下面的关键字来激活隐式求解:*CONTROL_IMPLICIT_GENERAL *CONTROL_IMPLICIT_GENERAL $ imflag dt0 iefs nstepsb igso 1 0.01 0 0 0 其中参数 imflag=1激活全隐式求解 imflag=0为缺省的显式求解。 imflag=2为显式求解后无缝进行隐式回弹求解。 该关键字对于所有隐式求解分析来说都是必需的。 与隐式求解相关的其它关键字: *CONTROL_IMPLICIT_LINEAR (v960版本改为*CONTROL_IMPLICIT_SOLVER ) *CONTROL_IMPLICIT_NONLINEAR (在v960版后改为*CONTROL_IMPLICIT_SOLUTION ) *CONTROL_IMPLICIT_AUTO *CONTROL_IMPLICIT_STABILIZATION *CONTROL_IMPLICIT_DYNAMICS *CONTROL_IMPLICIT_EIGENVALUE *CONTROL_IMPLICIT_BUCKLE (v970)
非参数回归模型 非参数回归模型也叫多元回归模型,它是一种脱离于混沌理论的多条路段分析方法。它是对当前路段和几条相邻路段的交通流信息对当前路段进行交通流预测的单条路段分析的扩展。它不需要先验知识,只需要有足够的历史数据即可。它的原理是:在历史数据库中寻找与当前点相似的近邻,并根据这些近邻来预测下一时间段的流量。该算法认为系统所有的因素之间的内在联系都蕴含在历史数据中,因此直接从历史数据中得到信息而不是为历史数据建立一个近似模型。非参数回归最为一种无参数、可移植、预测精度高的算法,它的误差比较小,且误差分布情况良好。尤其通过对搜索算法和参数调整规则的改进,使其可以真正达到实时交通流预测的要求。并且这种方法便于操作实施,能够应用于复杂环境,可在不同的路段上方便地进行预测。能够满足路网上不同路段的预测,避免路段位置和环境对预测的影响。随着数据挖掘技术左键得到人们的认可和国内外学者的大量相关研究,使得非参数回归技术在短时交通流预测领域得到广泛应用。 非参数回归的回归函数()X g Y =的估计值()X g n 一般表示为: ()()∑==n i i i i n Y X W X g 1 其中,Y 为以为广策随机变量;X 为m 维随机变量;(Xi,Yi )为第i 次观测值,i=1,...,n ;Wi(Xi)为权函数.非参数回归就是对g(X)的形状不加任何限制,即对g (X )一无所知的情况下,利用观测值(Xi,Yi ),对指定的X 值去估计Y 值。由于其不需要对系统建立精确的数学模型,因此比较适合对事变的、非线性的系统进行预测,符合对城市交通流的预测,同时可以与历史平均模型实现优缺点的互补。 K 近邻法 Friedman 于1977年提出了K 近邻法。其并不是让所有的数据都参与预测,而是以数据点到X 点的距离为基础,甲醛是只有离X 最近的K 个数据被用来估计相应的g(X)值。可以引入欧式空间距离d ,然后按这个距离将X1,X2,...,Xn 与X 接近的程度重新排序:Xk1,...,Xkn,取权值如下: Wki(X:X1,...,Xn)=ki,i=1,..,n 将与X 最近的前K 个观测值占有最大的权K=1,其余的观测值赋予权值k=0.最终得到应用于短时交通流预测的K 近邻法可表示为: ()()()()K t V t V g t V K i i ∑=+==+111
ABAQUS显式与隐式的区别 ABAQUS中动态分析包括两大类基本方法: 振型叠加法:用于求解线性动态问题; 直接积分法:主要用于求解非线性动态问题。 ABAQUS显式(explicit)和隐式(standard)算法分别对应着直接积分法中的中心差分法(显式)和Newmark(隐式)法等。 比较两种算法,显式中心差分法非常适合研究波的传播问题,如碰撞、高速冲击、爆炸等。显式中心差分法的M与C矩阵是对角阵,如给定某些有限元节点以初始扰动,在经过一个时间步长后,和它相关的节点进入运动,即U中这些节点对应的分量成为非零量,此特点正好和波的传播特点相一致。另一方面,研究波传播的过程需要微小的时间步长,这也正是中心差分法的特点。 而Newmark法更加适合于计算低频占主导的动力问题,从计算精度考虑,允许采用较大的时间步长以节省计算时间,同时较大的时间步长还可以过滤掉高阶不精确特征值对系统响应的影响。隐式方法要转置刚度矩阵,增量迭代,通过一系列线性逼近(Newton-Raphson)来求解。正因为隐式算法要对刚度矩阵求逆,所以计算时要求整体刚度矩阵不能奇异,对于一些接触高度非线性问题,有时无法保证收敛。 下面分别介绍这两种算法。 1 显式算法(中心差分法)
假定0,1t ,2t ,…,n t 时刻的节点位移,速度与加速度均为已知,现求解 )(t t t n ?+时刻的结构响应。 中心差分法对加速度,速度的导数采用中心差分代替,即为: )(21)2(12t t t t t t t t t t t U U t U U U U t U ?-?+?+?--?=+-?= (1) 将(1)式代入运动方程后整理得到 t t t R U M ??=?+(2) 式(2)中 C t M t M ?+?=211?2(3) t t t t t U C t M t U M t K R R ?-?-?-?--=)211()2(?22(4) 分别称为有效质量矩阵,有效载荷矢量。R ,M ,C ,K 为结构载荷,质量,阻尼,刚度矩阵。 求解线性方程组(2),即可获得t t ?+时刻的节点位移向量t t U ?+,将t t U ?+代回几何方程与物理方程,可得t t ?+时刻的单元应力和应变。 中心差分法在求解t t ?+瞬时的位移t t U ?+时,只需t t ?+时刻以前的状态变量 t U 和t t U ?-,然后计算出有效质量矩阵M ?,有效载荷矢量t R ?,即可求出t t U ?+,故称此解法为显式算法。 中心差分法,在开始计算时,需要仔细处理。t =0时,要计算t U ?,需要知 道t U ?-的值。因此应该有一个起始技术,因而该算法不是自动起步的。由于0U ,0U ,0 U 是已知的,由t =0时的(1)式可知: 02002 U t U t U U t ?+?-=?-(5)
2:参数化建模介绍 UG标准件开发都是基于标驱动参数化的标准件UG模板部件,因此UG标准件开发的实现,最重要的环节是建立参数化的标准件UG模板部件。在建立参数化标准件UG模板部件过程中要大量地应用到草图、参数化建模、表达式及装配建模等技术。 2.1参数化草图技术在UG标准件开发中的应用 在此部分不再详述草图的功能,介绍一些技巧: 1. 合理地设置草图的放置面,以达到标准件在调用时能够实现自动地装配定位。在此我们一般先建立绝对基准坐标系(Absolute CSYS,位于绝对位置的基准坐标系)或位于绝对工作坐标原点的固定基准面和固定基准轴,然后建立与绝对基准坐标系或过顶基准面呈一定偏置关系的相关基准面,并以此相关基准面作为草图的放置面。 2. 合理运用相关参数点、基准轴和相关基准面,建立标准件的草图定位原点。例如当我们使用相关参数点作为标准件的草图定位原点,只要在标准件管理器中,将相关参数点的坐标值设置为理想的目标值,标准件就能自动装配定位到指定位置。 2.2参数化建模技术在UG标准件开发中的应用 UG虽然支持非参数的标准件开发,但是,如果开发非参数的标准件就失去了其本质意义,因为它不能建立系列规格的零件尺寸标准,不能控制零件的几何及尺寸的变更。在真正意义上的UG标准件开发中,我们必然要使用全参数建模技术,用参数去驱动和控制标准件的结构和尺寸规格,因此在UG标准件开发过程中要具有参数化建模的观点和思想。要实现UG标准件的参数化建模,注意一下细节和技巧。 1. 前期要吃透标准件的特点,根据标准件的特点定义好设计意图、规划好结构设计实现方法、规划主控参数。 2. UG支持在一个部件文件中有多个主体结构体,我们在标准件的开发中一
第七章 非参数回归模型与半参数回归模型 第一节 非参数回归与权函数法 一、非参数回归概念 前面介绍的回归模型,无论是线性回归还是非线性回归,其回归函数形式都是已知的,只是其中参数待定,所以可称为参数回归。参数回归的最大优点是回归结果可以外延,但其缺点也不可忽视,就是回归形式一旦固定,就比较呆板,往往拟合效果较差。另一类回归,非参数回归,则与参数回归正好相反。它的回归函数形式是不确定的,其结果外延困难,但拟合效果却比较好。 设Y 是一维观测随机向量,X 是m 维随机自变量。在第四章我们曾引进过条件期望作回归函数,即称 g (X ) = E (Y |X ) (7.1.1) 为Y 对X 的回归函数。我们证明了这样的回归函数可使误差平方和最小,即 22)]([min )]|([X L Y E X Y E Y E L -=- (7.1.2) 这里L 是关于X 的一切函数类。当然,如果限定L 是线性函数类,那么g (X )就是线性回归函数了。 细心的读者会在这里立即提出一个问题。既然对拟合函数类L (X )没有任何限制,那么可以使误差平方和等于0。实际上,你只要作一条折线(曲面)通过所有观测点(Y i ,X i )就可以了是的,对拟合函数类不作任何限制是完全没有意义的。正象世界上没有绝对的自由一样,我们实际上从来就没有说放弃对L(X)的一切限制。在下面要研究的具体非参数回归方法,不管是核函数法,最近邻法,样条法,小波法,实际都有参数选择问题(比如窗宽选择,平滑参数选择)。 所以我们知道,参数回归与非参数回归的区分是相对的。用一个多项式去拟合(Y i ,X i ),属于参数回归;用多个低次多项式去分段拟合(Y i ,X i ),叫样条回归,属于非参数回归。 二、权函数方法 非参数回归的基本方法有核函数法,最近邻函数法,样条函数法,小波函数法。这些方法尽管起源不一样,数学形式相距甚远,但都可以视为关于Y i 的线性组合的某种权函数。也就是说,回归函数g (X )的估计g n (X )总可以表为下述形式: ∑==n i i i n Y X W X g 1 )()( (7.1.3)
显式与隐式方法对比: 隐式时间积分 ——不考虑惯性效应([C]and[M])。 ——在t+△t时计算位移和平均加速度:{u}={F}/[K]。 ——线性问题时,无条件稳定,可以用大的时间步。 ——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。 显式时间积分 ——用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。 ——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t ——新的几何构型由初始构型加上{X}={X0}+{U} ——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。 关于文件组织: jobname.k——lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst——后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。 jobname.his——在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。 时间历程ASCII文件——包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT 节点数据,ELOUT单元数据…… 在显式动力分析中还可以生成下列文件: D3PLOT——类似ansys中jobname.rst D3THDT——时间历程文件,类似ansys中jobname.his 关于单元: ANSYS/LSDYNA有7中单元(所有单元均为三维单元): LINK160:显式杆单元;BEAM161:显式梁单元;SHELL163:显式薄壳单元;SOLID164:显式块单元;COMBI165:显式弹簧与阻尼单元;MASS166:显式结构质量;LINK167:显式缆单元 显式单元与ansys隐式单元不同: ——每种单元可以用于几乎所有的材料模型。在隐式分析中,不同的单元类型仅仅适用于特定的材料类型。 ——每种单元类型有几种不同算法,如果隐式单元有多种算法,则具有多个单元名称。
《机器学习(Machine Learning)》教学大纲 学分:5 学时:90 开课单位:软件学院 任课教师及职称(学位):汪浩教授、龙浩副教授、李第平博士 教学内容及要求 1、课程简介:世界的本质是数据(参见维克托·迈尔·舍恩伯格《大数据时代》),数据挖掘的任务是从大量数据中发现隐藏的、未知的和潜在的知识或模式的过程。机器学习(Machine Learning, ML)是数据挖掘的基础,为数据挖掘提供了基本工具,是大数据时代重要的课程。机器学习涉及概率论、统计学、最优化理论、算法复杂性理论等多门课程,本课程将讨论机器学习方法背后的基本数学原理,机器学习方法的基本数学模型,以及机器学习的基本方法和算法。 2、教学目的与要求:了解和掌握回归分析、分类、聚类、降维等机器学习的基本算法,同时掌握这些方法背后的数学原理,学习这些算法的基本原理,并能利用对应的软件包进行数据分析和挖掘。 3、主要内容 第一章引言(10课时) 教学目的和基本要求:了解机器学习的基本内容,机器学习的分类,机器学习的三要素,机器学习的模型评估和选择。 教学重点、难点:机器学习三要素,机器学习模型评估与选择 教学基本内容: 1.1.什么是机器学习 1.2.机器学习分类 ●有监督学习 ●无监督学习 ●半监督学习 1.3.机器学习三要素
●模型 ●策略 ●算法 1.4.机器学习模型评估与选择 ●训练误差与测试误差 ●过拟合与模型选择 第二章回归分析(12课时) 教学目的和基本要求:了解回归分析的作用,掌握回归分析的基本方法。 教学重点、难点:最小二乘法、最大似然法。 教学基本内容: 1.1线性建模:最小二乘法 1.2回归分析用于预测 1.3正则化最小二乘法 1.4线性建模:最大似然法 第三章机器学习的贝叶斯方法(12课时) 教学目的和基本要求:学习掌握共轭模型和非共轭模型等两种贝叶斯推理的基本方法。 教学重点、难点:图模型、共轭模型、最大后验估计MAP,拉普拉斯近似等。教学基本内容: 3.1 图模型 3.2 贝叶斯估计的共轭模型 ●硬币游戏 ●后验概率 ●三个场景 ●边缘似然估计 3.3 贝叶斯计的非共轭模型 ●非共轭模型 ●二值响应 ●最大后验估计MAP
显式与隐式方法对比 显式与隐式方法对比: 隐式时间积分 ——不考虑惯性效应([C]and[M])。 ——在t+△t时计算位移和平均加速度:{u}={F}/[K]。 ——线性问题时,无条件稳定,可以用大的时间步。 ——非线性问题时,通过一系列线性逼近(Newton-Raphson)来求解;要求转置非线性刚度矩阵[k];收敛时候需要小的时间步;对于高度非线性问题无法保证收敛。 显式时间积分 ——用中心差法在时间t求加速度:{a}=([F(ext)]-[F(int)])/[M]。 ——速度与位移由:{v}={v0}+{a}t,{u}={u0}+{v}t ——新的几何构型由初始构型加上{X}={X0}+{U} ——非线性问题时,块质量矩阵需要简单的转置;方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。 关于文件组织: jobname.k——lsdyna输入流文件,包括所有的几何,载荷和材料数据jobname.rst——后处理文件主要用于图形后处理(post1),它包含在相对少的时间步处的结果。 jobname.his——在post26中使用显示时间历程结果,它包含模型中部分与单元集合的结果数据。 时间历程ASCII文件——包含显式分析额外信息,在求解之前需要用户指定要输出的文件,它包括:GLSTAT全局信息,MATSUM材料能量,SPCFORC节点约束反作用力,RCFORC接触面反作用力,RBDOUT刚体数据,NODOUT节点数据,ELOUT单元数据…… 在显式动力分析中还可以生成下列文件: D3PLOT——类似ansys中jobname.rst
proe参数化建模 本教程分两部分,第一部分主要介绍参数化建模的相关概念和方法,包括参数的概念、参数的设置、关系的概念、关系的类型、如何添加关系以及如何使用关系创建简单的参数化零件(以齿轮为例)。 第二部分介绍参数化建模的其他方法:如族表的应用、如何使用UDF(用户自定义特征)、如何使用Pro/Program创建参数化零件。(后一部分要等一段时间了,呵呵) 参数化设计是proe重点强调的设计理念。参数是参数化设计的核心概念,在一个模型中,参数是通过“尺寸”的形式来体现的。参数化设计的突出有点在于可以通过变更参数的方法来方便的修改设计意图,从而修改设计意图。关系式是参数化设计中的另外一项重要内容,它体现了参数之间相互制约的“父子”关系。 所以,首先要了解proe中参数和关系的相关理论。 一、什么是参数? 参数有两个含义: ●一是提供设计对象的附加信息,是参数化设计的重要要素之一。参数和模型一起存储,参数可以标明不同模型的属性。例如在一个“族表”中创建参数“成本”后,对于该族表的不同实例可以设置不同的值,以示区别。 ●二是配合关系的使用来创建参数化模型,通过变更参数的数值来变更模型的形状和大小。 二、如何设置参数 在零件模式下,单击菜单“工具”——参数,即可打开参数对话框,使用该对话框可添加或编辑一些参数。 1.参数的组成 (1)名称:参数的名称和标识,用于区分不同的参数,是引用参数的依据。注意:用于关系
的参数必须以字母开头,不区分大小写,参数名不能包含如下非法字符:!、”、@和#等。 (2)类型:指定参数的类型 ?a)整数:整型数据 ?b)实数:实数型数据 ?c)字符型:字符型数据 ?d)是否:布尔型数据。 (3)数值:为参数设置一个初始值,该值可以在随后的设计中修改 (4)指定:选中该复选框可以使参数在PDM(Product Data Management,产品数据管理)系统中可见 (5)访问:为参数设置访问权限。 ?a)完全:无限制的访问权,用户可以随意访问参数 ?b)限制:具有限制权限的参数 ?c)锁定:锁定的参数,这些参数不能随意更改,通常由关系式确定。 (6)源:指定参数的来源 ?a)用户定义的:用户定义的参数,其值可以随意修改 ?b)关系:由关系式驱动的参数,其值不能随意修改。 (7)说明:关于参数含义和用途的注释文字 (8)受限制的:创建其值受限制的参数。创建受限制参数后,它们的定义存在于模型中而与参数文件无关。 (9)单位:为参数指定单位,可以从其下的下拉列表框中选择。 2.增删参数的属性项目 可以根据实际需要增加或删除以上9项中除了“名称”之外的其他属性项目
心理学研究中潜变量空间的特性探讨 '学研究中潜变量空间的特性探讨 1 问题提出\ue004 心理测量是一种间接测量,即常通过外显的行为指标对潜在的心理变量进行测量估计。然而,传统的心理 方法常将外显变量混淆成潜在变量,例如回归分析中的变量是外显变量,却常用于推断潜在变量之间的关系;或常将外显指标的加总看做潜在变量,忽略外显指标在潜在心理变量测量中的误差。\ue004 随着潜在变量模型的 ,根据外显变量和潜在变量的数据类型可使用不同的统计模型,以更贴近心理变量的真实空间结构。其中,外显变量的数据类型主要决定于测验的设计,而潜在变量是内隐的心理特征,其数据类型与其结果一样无法确定。在以往研究中,潜变量的数据类型多以理论构想来确定,例如,霍兰德的人格理论假设个体的人格可分为六类,项目反应理论则假设个体的能力是连续变量。这些假设虽然得到理论的支持,但在实证研究中亦出现数据不符合前提假设的情况。另一方面,由于类别型数据处理方法的相对滞后,对于类别型的潜变量还相对缺少实证研究和对理论的统计模型验证。常见的方法是通过某些统计分析方法确定决断值,将潜在类型仅局限于量的差异,而忽略了对心理类型之间潜在结构差异的探讨。潜在剖面分析和潜在类别分析是近年来发展较为成熟的类型划分方法,但其分析的前提是潜在类别下外显变量之间不存在关联(即局部独立性)。这一前提假设在实际数据中又经常被违背,反映了这些数据在潜在类型内又存在多维性。如何分析确定潜变量的数据类型和空间特性?这不仅取决于理论研究,更应通过统计方法进行探索与验证。该问题的解决不但影响心理论研究进展,并且为心理测量的设计与统计分析模型的选取提供直接的理论指导,以保证心理测量与统计的结构和内容效度。本文重点对该议题的研究发展进行评述和。\ue004 2 潜变量类型的判断方法\ue003 2.1 通过模型比较确定分布状态\ue004 Markon和Krueger(2006)认为,间断型变量模型是连续型变量模型的特例,犹如方差分析是回归分析的特例一样。而称名潜变量模型实质是多维的二分变量模型,连续分布可用无数个等距数值结点组成的间断分布表示。因此,连续与间断的比较主要在于间断分布中结点的多少,当结点很少时,其模型的参数估计和拟合与连续分布模型差异很大,而当结点足够多时,可用半参数或非参数模型拟合连续分布(H nen,1996;Owen,2001)。然而,无法通过比较单纯的连续分布和间断分布以确定潜变量是连续还是间断。潜在类别模型(Latent class model,LCM)则用于表示间断的潜变量,而且是具有多维的二分潜变量。在多维度的潜在类别模型中,随着潜变量数值结点的增加,模型所拟合的并非连续分布,而是逐渐拟合多维的潜变量结构。基于此,LCM可以与间断等距(discrete metrical)和连续的潜在特质模型相比较,从而判断模型的维度和数值结点数目。若LCM拟合得更好,说明潜变量是间断分布或多维的连续分布。间断等距(discrete metrical)、多级(polyvalued)和连续型IRT分别是反映间断、称名和连续的潜变量。而混合模型则通过几个连续子分布来表示间断的潜变量,而这种间断性则更为高阶。由于同在潜在结构模型的框架下,模型之间具有可比性,可通过比较间断分布的模型与连续分布的模型,以探讨潜变量的性质。由于外显变量通常为间断数据,该研究就此 累积逻辑斯蒂(cumulative logistic latent variable model)探讨顺序型外显变量下的潜变量类型。在此模型中,潜变量θk不但受斜率a和截距b影响,还受分布状态p(θk)影响,其中该分布是连续还是间断分布则决定于结点数目k;该值可以自由估计,亦可根据分
心理学报 2011, Vol. 43, No.10, 1219?1228 Acta Psychologica Sinica DOI: 10.3724/SP.J.1041.2011.01219 收稿日期: 2010-10-08 * 国家自然科学基金项目(30870784)资助。 通讯作者: 温忠麟, E-mail: wenzl@https://www.doczj.com/doc/0217023131.html, 1 为了区别于由统计软件得到的标准化估计(standardized estimation), 用“标准化”估计来表示交互效应的标准化估计。但在不致引起混淆的场合, 可以简单地称为标准化估计。 无均值结构的潜变量交互效应模型的标准化估计* 吴 艳1 温忠麟2 侯杰泰3 Herbert W. Marsh 4 (1广东外语外贸大学应用心理学系, 广州 510420) (2华南师范大学心理应用研究中心, 广州 510631) (3香港中文大学教育心理系, 香港) (4牛津大学教育系, 英国) 摘 要 潜变量交互效应建模研究近年来有两项重要进展, 一是提出了潜变量交互效应模型的标准化估计及其计算公式; 二是发现无均值结构模型可以取代传统的有均值结构模型, 建模大为简化。但标准化估计是在传统的有均值结构模型中建立的, 在简化的模型中同样适用吗?本文在无均值结构模型的框架内, 给出了潜变量交互效应模型的标准化形式、计算公式和建模步骤, 并通过模拟研究比较了极大似然和广义最小二乘两种估计方法、配对乘积指标和全部乘积指标两种指标类型, 结果表明, 在计算交互效应的标准化估计时, 应当使用配对乘积指标建模, 并且首选极大似然估计。 关键词 潜变量; 交互效应; 结构方程; 乘积指标; 估计方法 分类号 B841.2 在心理、行为、管理和市场等研究领域, 所涉及的变量往往是潜变量(latent variable), 如成就动机、负性情感、工作满意度等都是潜变量。如何分析潜变量的交互效应(interaction effect), 是研究方法领域的一个重要课题, 近年来有了长足的发展, 其中比较重要的进展有两个。一是提出了潜变量交互效应(包括调节效应)模型的适当“标准化”估计1 (appropriate standardized estimation)及其计算公式(温忠麟, 侯杰泰, & Marsh, 2008), 并且证明了“标准化”估计是尺度不变的(scale invariant), 即“标准化”估计不会因测量单位的改变而变化(Wen, Marsh, & Hau, 2010)。二是发现无均值结构的模型可以取代传统的有均值结构的模型, 建模大为简化, 且理论上不会改变主效应和交互效应(Lin, Wen, Marsh, & Lin, 2010; 吴艳, 温忠麟, 林冠群, 2009), 模拟研究结果支持了理论预期。 前述的潜变量交互效应模型的“标准化”估计是在传统的有均值结构的模型中建立的, 在简化的模型中同样适用吗?本文在无均值结构模型的框架内, 给出潜变量交互效应模型的“标准化”形式、计算公式和建模步骤, 并且用模拟的方法研究了下面两个问题:(1)计算潜变量交互效应模型的“标准化”估计时, 结构方程建模(structural equation modeling, SEM)软件中默认的极大似然(maximum likelihood, ML)方法是否还应当是首选的估计方法?(2)计算潜变量交互效应模型的“标准化”估计时, 配对乘积指标策略(Marsh, Wen, & Hau, 2004)是否还是比较好的策略?其中, 第一个问题被Wen 等人(2010)作为一个有待解决的问题提了出来, 而第二个问题则还未见有人讨论过。显然, 这两个都是在实际应用中会碰到的并且需要解决的问题。 1 无均值结构的潜变量交互效应模 型的标准化估计 1.1 文献回顾与问题的提出 设要分析ξ1和ξ2对η 的交互效应。传统建模方
第七章 非参数回归模型与半参数回归模型 第一节 非参数回归与权函数法 一、非参数回归概念 前面介绍的回归模型,无论是线性回归还是非线性回归,其回归函数形式都是已知的,只是其中参数待定,所以可称为参数回归。参数回归的最大优点是回归结果可以外延,但其缺点也不可忽视,就是回归形式一旦固定,就比较呆板,往往拟合效果较差。另一类回归,非参数回归,则与参数回归正好相反。它的回归函数形式是不确定的,其结果外延困难,但拟合效果却比较好。 设Y 是一维观测随机向量,X 是m 维随机自变量。在第四章我们曾引进过条件期望作回归函数,即称 g (X ) = E (Y |X ) (7.1.1) 为Y 对X 的回归函数。我们证明了这样的回归函数可使误差平方和最小,即 22)]([min )]|([X L Y E X Y E Y E L -=- (7.1.2) 这里L 是关于X 的一切函数类。当然,如果限定L 是线性函数类,那么g (X )就是线性回归函数了。 细心的读者会在这里立即提出一个问题。既然对拟合函数类L (X )没有任何限制,那么可以使误差平方和等于0。实际上,你只要作一条折线(曲面)通过所有观测点(Y i ,X i )就可以了是的,对拟合函数类不作任何限制是完全没有意义的。正象世界上没有绝对的自由一样,我们实际上从来就没有说放弃对L(X)的一切限制。在下面要研究的具体非参数回归方法,不管是核函数法,最近邻法,样条法,小波法,实际都有参数选择问题(比如窗宽选择,平滑参数选择)。 所以我们知道,参数回归与非参数回归的区分是相对的。用一个多项式去拟合(Y i ,X i ),属于参数回归;用多个低次多项式去分段拟合(Y i ,X i ),叫样条回归,属于非参数回归。 二、权函数方法 非参数回归的基本方法有核函数法,最近邻函数法,样条函数法,小波函数法。这些方法尽管起源不一样,数学形式相距甚远,但都可以视为关于Y i 的线性组合的某种权函数。也就是说,回归函数g (X )的估计g n (X )总可以表为下述形式: ∑==n i i i n Y X W X g 1 )()( (7.1.3)