
Hefei University 自动控制课程综述 开环与闭环系统 BACH ELOR DISSERTATION 论文题目:______________ 开环与闭环系统_____________________ 学科专业:____________ 自动化1班_______________________ 学生姓名:__________________ 姚辉___________________________ 导师姓名:__________________ 李秀娟__________________________
摘要: 所谓开环与闭环系统主要是对开环和闭环传递函数的研究。 所谓传递函数,只是反馈信号的数学公式/模型。传递函数零初始条件下线性系统响应(即输出)量的拉普拉斯变换(或z变换)与激励(即输入)量的拉普拉斯变换之比。记作G(s)=Y(s)/U(s),其中Y(s)、U(s)分别为输出量和输入量的拉普拉斯变换。传递函数是描述线性系统动态特性的基本数学工具之一,经典控制理论的主要研究方法——频率响应法和根轨迹法——都是建立在传递函数的基础之上。而在经典控制理论中传递函数有两个重要且易混淆的内容即: Gk(s)=G(s)?H(s) 开环传递函数 Gb(s)=G(s)/1+G(s)?H(s) 闭环传递函数开环传函其实是闭环传函的一部分。开环和闭环的本质区别是:闭环控制系统的被控量要反馈回到给定信号端,与给定信号进行比较(一般为负反馈),而开环没有这一环节。 另外,还有半闭环控制系统,之所以叫半闭环是因为反馈回到给定输入信号的反馈量不是直接取自被控量,而是间接取到的。 关键字:自动控制原理、开环系统、闭环系统、传递函数、区别、联系 发展与前景: 自动控制理论是研究自动控制共同规律的技术科学。它的发展初期,是以开环与闭环理论为基础的自动调节原理,主要用于工业控制,二战期间为了设计和制造飞机及船用自动驾驶仪,火炮定位系统,雷达跟踪系统以及其他基于反馈原理的军用设备,进一步促进并完善了自动控制理论的发展。到战后,以形成完整的自动控制理论体系,这就是以传递函数为基础的经典控制理论,它主要研究单输入-单输出,线形定常数系统的分析和设计问题。 20世纪60年代初期,随着现代应用数学新成果的推出和电子计算机的应用,为适应宇航技术的发展,自动控制理论跨入了一个新阶段——现代控制理论。他主要研究具有高性能,高精度的多变量变参数的最优控制问题,主要采用的方法是以状态为基础的状态空间法。目前,自动控制理论还在继续发展,正向以控制论,信息论,仿生学为基础的智能控制理论深入。 为了实现各种复杂的控制任务,首先要将被控制对象和控制装置按照一定的方式连接起来,组成一个有机的总体,这就是自动控制系统。在自动控制系统中,被控对象的输出量即被控量是要求严格加以控制的物理量,它可以要求保持为某一恒定值,例如温度,压力或飞行航迹等;而控制装置则是对被控对象施加控制作用的机构的总体,它可以采用不同的原理和方式对被控对象进行控制,但最基本的一种是基于闭环控制的闭环反馈控制系统。 开环与闭环系统的应用(以数控机床为例): 开环控制指调节系统不接受反馈的控制,只控制输出,不计后果的控制。又称为无反馈控制系统。
目录 摘要 (1) 双闭环流量比值控制系统设计 (2) 1、双闭环比值控制系统的原理与结构组成 (2) 2、课程设计使用的设备 (3) 3、比值系数的计算 (4) 4、设备投运步骤以及实验曲线结果 (5) 5、总结 (16) 6、参考文献 (17)
摘要 在许多生产过程中,工艺上常常要求两种或者两种以上的物料保持一定的比例关系。一旦比例失调,会影响生产的正常进行,造成产量下降,质量降低,能源浪费,环境污染,甚至造成安全事故。 这种自动保持两个或多个参数间比例关系的控制系统就是比值控制所要完成的任务。因此比值控制系统就是用于实现两个或两个以上物料保持一定比例关系的控制系统。需要保持一定比例关系的两种物料中,总有一种起主导作用的物料,称这种物料为主物料,另一种物料在控制过程中跟随主物料的变化而成比例的变化,这种无物料成为从物料。由于主,从物料均为流量参数,又分别成为主物料流量和从物料流量,通常,主物料流量用Q1表示,从物料流量用Q2表示,工艺上要求两物料的比值为K,即K=Q2/Q1.在比值控制精度要求较高而主物料Q1又允许控制的场合,很自然就想到对主物料也进行定值控制,这就形成了双闭环比值系统。在双闭环比值系统中,当主物料Q1受到干扰发生波动时,主物料回路对其进行定值控制,使从物料始终稳定在设定值附近,因此主物料回路是一个定值控制系统,而从物料回路是一个随动控制系统,主物料发生变化时,通过比值器的输出,使从物料回路控制器的设定值也发生变化,从而使从物料随着主物料的变化而成比例的变化。当从物料Q2受到干扰时,和单闭环控制系统一样,经过从物料回路的调节,使从物料稳定在比值器输出值上。双闭环比值控制系统由于实现了主物料Q1的定值控制,克服了干扰的影响,使主物料Q1变化平稳。当然与之成比例的从物料Q2变化也将比较平稳。根据双闭环比值控制系统的优点,它常用在主物料干扰比较频繁的场合,工艺上经常需要升降负荷的场合以及工艺上不允许负荷有较大波动的场合。本实验通过了解双闭环比值控制系统的原理与结构组成,进行双闭环流量比值控制系统设计(包括仪表选型)以及进行比值系数的计算,最后基于WinCC进行监控界面设计,给出不同参数下的响应曲线,根据扰动作用时,记录系统输出的响应曲线。
图像处理及识别技术在机器人路径规划中的一种应用 摘要:目前,随着计算机和通讯技术的发展,在智能机器人系统中,环境感知与定位、路径规划和运动控制等功能模块趋向于分布式的解决方案。机器人路径规划问题是智能机器人研究中的重要组成部分,路径规划系统可以分为环境信息的感知与识别、路径规划以及机器人的运动控制三部分,这三部分可以并行执行,提高机器人路径规划系统的稳定性和实时性。在感知环节,视觉处理是关键。本文主要对机器人的路径规划研究基于图像识别技术,研究了图像处理及识别技术在路径规划中是如何应用的,机器人将采集到的环境地图信息发送给计算机终端,计算机对图像进行分析处理与识别,将结果反馈给机器人,并给机器人发送任务信息,机器人根据接收到的信息做出相应的操作。 关键词:图像识别;图像处理;机器人;路径规划 ABSTRACT:At present, with the development of computer and communication technology, each module, such as environment sensing, direction deciding, route planning and movement controlling moduel in the system of intelligent robot, is resolved respectively. Robot path planning is an part of intelligent robot study. The path planning system can be divided into three parts: environmental information perception and recognition, path planning and motion controlling. The three parts can be executed in parallel to improve the stability of the robot path planning system. As for environment sensing, vision Proeessing is key faetor. The robot path planning of this paper is based on image recognition technology. The image processing and recognition technology is studied in the path planning is how to apply, Robots will sent collected environment map information to the computer terminal, then computer analysis and recognize those image information. After that computer will feedback the result to the robot and send the task information. The robot will act according to the received information. Keywords: image recognition,image processing, robot,path planning
基于MATLAB 的直流电机 双闭环调速系统的设计与仿真 设计任务书: 1. 设置该大作业的目的 在转速闭环直流调速系统中,只有电流截止负反馈环节对电枢电流加以保护,缺少对电枢电流的精确控制,也就无法充分发挥直流伺服电动机的过载能力,因而也就达不到调速系统的快速起动和制动的效果。通过在转速闭环直流调速系统的基础上增加电流闭环,即按照快速起动和制动的要求,实现对电枢电流的精确控制,实质上是在起动或制动过程的主要阶段,实现一种以电动机最大电磁力矩输出能力进行启动或制动的过程。此外,通过完成本大作业题目,让学生体会反馈校正方法所具有的独特优点:改造受控对象的固有特性,使其满足更高的动态品质指标。 2. 大作业具体容 设一转速、电流双闭环直流调速系统,采用双极式H 桥PWM 方式驱动,已知电动机参数为: 额定功率200W ; 额定电压48V ; 额定电流4A ; 额定转速=500r/min ; 电枢回路总电阻8=R Ω; 允许电流过载倍数λ=2; 电势系数=e C 0.04Vmin/r ; 电磁时间常数=L T 0.008s ; 机电时间常数=m T 0.5s ; 电流反馈滤波时间常数=oi T 0.2ms ; 转速反馈滤波时间常数=on T 1ms ; 要求转速调节器和电流调节器的最大输入电压==* *im nm U U 10V ; 两调节器的输出限幅电压为10V ;
f10kHz; PWM功率变换器的开关频率= K 4.8。 放大倍数= s 试对该系统进行动态参数设计,设计指标: 稳态无静差; σ5%; 电流超调量≤ i 空载起动到额定转速时的转速超调量σ≤ 25%; t0.5 s。 过渡过程时间= s 3. 具体要求 (1) 计算电流和转速反馈系数; (2) 按工程设计法,详细写出电流环的动态校正过程和设计结果; (3) 编制Matlab程序,绘制经过小参数环节合并近似后的电流环开环频率特性曲线和单位阶跃响应曲线; (4) 编制Matlab程序,绘制未经过小参数环节合并近似处理的电流环开环频率特性曲线和单位阶跃响应曲线; (5) 按工程设计法,详细写出转速环的动态校正过程和设计结果; (6) 编制Matlab程序,绘制经过小参数环节合并近似后的转速环开环频率特性曲线和单位阶跃响应曲线; (7) 编制Matlab程序,绘制未经过小参数环节合并近似处理的转速环开环频率特性曲线和单位阶跃响应曲线; (8) 建立转速电流双闭环直流调速系统的Simulink仿真模型,对上述分析设计结果进行仿真; (9) 给出阶跃信号速度输入条件下的转速、电流、转速调节器输出、电流调节器输出过渡过程曲线,分析设计结果与要求指标的符合性;
利用机器视觉和手的运动控制来提高起重机操作员的性能 摘要所有起重机固有的有效载荷摆动使人工快速,准确,安全的操作有效载荷具有挑战性。防爆起重机控制接口也增加了操作难度。本文介绍了一种新的接口,允许运营商通过移动手持设备(棒或手套)在空间自由驱动起重机。起重机轨道安装了摄像头的手提式的运动装置,它的位置是用来驱动起重机。两个控制体系结构进行了研究。第一个使用一个简单的反馈控制器,第二使用反馈和输入整形器。两个算子的研究表明,手部运动起重机控制要比使用标准按钮悬而未决的控制快速和安全。 指数条款控制接口,起重机,输入整形,机器视觉,振荡。 Ⅰ引言 起重机在维护现代工业经济活力发挥关键作用。他们的重要性表现在造船厂,建筑工地,仓库和材料处理的各种应用。起重机操纵性对于工业生产,低生产成本和工人的安全是一个重要因素。 起重机的固有特性之一有效载荷摆动或更复杂的振荡动力学像自然的倾向双摆,是不利于操作的。已作出重大努力开发控制方案以减少从发出的命令和外部干扰的振动响应。也有在控制起重机包含旋转接头的研究,这由于其非线性动力学的一个额外的水平增加了复杂性。对于运营商而言使用传统的接口,如按钮式起重机吊坠受益于振荡抑制技术。他们产生比没有这样的补偿算子更安全(不与障碍物的碰撞)和更高效的起重机运动(更快的任务完成时间和减少操作按钮)。 2010年9月26日收到手稿; 2011年4月7日修订,2011年6月10日,2012年4月6日和2012年2月9日接受。出版日期2012年6月8日,当前版本的日期2012年10月12日。这项工作是由西门子工业自动化,乔治亚理工学院制造研究中心和波音研究与技术支持。本文推荐副主编E.J.巴斯。
运动控制器知识
运动控制是指对机械运动部件的位置、速度、方向等进行实时控制管理,使其按照预期的运动轨迹和规定的运动参数进行运动。运动控制行业是工业自动化行业的一个分支,其产品主要是解决自动化装置精确位置控制和严格的速度同步问题。 运动控制系统是通过对电机电压、电流、频率等输入变量的控制,来改变工作机械的转矩、速度、位移等机械量,使工作机械按照人们期望的要求运行,以满足生产工艺及其他应用的需要。典型的运动控制系统如下图所示: 控制器接收操作员发出的指令后,向驱动器发送控制信号,驱动器接收后,转变为电流和电压信号,通过该信号驱动电机,电机开始按所设定的力矩、速度、位置等指令信号完成相应的运
动、测量反馈装置将检测到的移动部件和实际位移量进行位置反馈,以纠正电机执行动作的偏差。其中,控制器相当于运动控制系统的“大脑”,驱动器和电机构成的伺服系统则负责具体的执行动作,其中,驱动器相当于“心脏”,电机则充当了“手脚”的角色。 (2)控制器的基本概况 ①控制器的概念 控制器起连接操作人员与伺服系统的作用,其主要任务是通过计算每个预定运动的轨迹,形成控制参数,向伺服系统发出运动指令,同时监测传感器传输的反馈信号并及时调整,保证运动控制系统能够正确运行。 ②控制器的发展历程 最初的控制器是独立运行的专用控制器,无需处理器和操作系统支持,可以独立完成运动控制功能、人机交互功能和工艺技术要求的其他功
能,这类控制器主要针对专门的数控机械和其他自动化设备而设计,不能离开特定的工艺要求二跨行业应用,用户不能根据应用需求而重组自己的运动控制系统,所以通用运动控制器的发展成为市场必然需求。 通用运动控制技术作为自动化技术的一个重要分支,1990年开始在发达国家进入快速发展的阶段,由于有强劲的市场需求的推动,通用运动控制技术发展迅速并得到广泛应用。近年来,随着通用运动控制技术的不断进步和完善,通用运动控制器作为一个独立的运动控制类产品,已经被越来越多的行业领域所接受。 运动控制器也从以单片机、微处理器或专用芯片作为核心处理器,发展到了基于PC总线、以DSP和FPGA作为核心处理器的开放式运动控制器。运动控制技术也由面向传统的数控加工行业的专用运动控制技术而发展为具有开放结构、能结合具体应用要求而快速重组的现金运动控制技术。
开环控制、半闭环控制、闭环控制的区别 2011-11-2 10:31 提问者:升玩就走|浏览次数:485次 数控技术 推荐答案 2011-11-2 13:39 开环:没有测量回路。 半闭环:有一个测量回路(主要反馈控制转速:编码器)注意:编码器有绝对值和相对值之分 全闭环:有两个测量回路(反馈转速+位置:编码器+光栅尺或外置编码器) | 其他回答共2条 2011-11-3 14:01Einstiphen|五级 以监测点的不同来区分三者。 开环控制就是系统按设定的参数来运转,不作监测,不反馈。 半闭环控制就是在系统的执行端之前(非最终端)设置监测,反馈回的信号可以对执行端之前的机构进行实时调整。 闭环控制是在系统的最终执行端设置监测,反馈回的信号直接用于系统整体调整。 开环系统最简单,成本低,但执行精度最差,基本无系统波动。 闭环系统最复杂,控制成本最高,但执行精度相当高,系统波动也最大。 半闭环系统介于以上两者之间。 |评论 2011-11-17 10:09wangpeng3219|二级 闭环 闭环也叫反馈控制系统,是将系统输出量的测量值与所期望的给定值相比较,由此产生一个偏差信号, 利用此偏差信号进行调节控制,使输出值尽量接近于期望值。举例:调节水龙头——首先在大脑 中对水流有一个期望的流量,水龙头打开后由眼睛观察现有的流量大小与期望值进行比较,并不断的
用手进行调节形成一个反馈闭环控制;骑自行车——同理不断的修正行进的方向与速度形成闭环控制。 半闭环 半闭环控制系统:半闭环控制系统是在开环控制系统的伺服机构中装有角位移检测装置,通过检测 伺服机构的滚珠丝杠转角,半闭环控制系统图间接检测移动部件的位移,然后反馈到数控装置的 比较器中,与输入原指令位移值进行比较,用比较后的差值进行控制,使移动部件补充位移,直到 差值消除为止的控制系统。由于半闭环控制系统将移动部件的传动丝杠螺母不包括在环内,所以传动 丝杠螺母机构的误差仍会影响移动部件的位移精度,由于半闭环控制系统调试维修方便,稳定性好, 目前应用比较广泛。半闭环控制系统的伺服机构所能达到的精度、速度和动态特性优于开环伺服机构, 为大多数中小型数控机床所采用。 开环 相对闭环而言开环(kāi huán)英文名open-loop。开环相对于闭环而言,也叫开环控制系统。意思就是不将控制的结果反馈回来影响当前控制的系统。举例:打开灯的开关——按下开关后的一瞬间,控制活动已经结束,灯是否亮起以对按开关的这个活动没有影响;投篮——篮球出手后就无法再继续对其控制,无论球进与否,球出手的一瞬间控制活动即结束。
课程设计报告 课程课程设计 课题双闭环控制系统设计 班级 姓名 学号
目录 第1章双闭环系统分析 (1) 1.1系统介绍 (1) 1.2系统原理 (1) 1.3双闭环的优点 (1) 第2章系统参数设计 (2) 2.1电流调节器的设计 (2) 2.1.1时间参数选择 (2) 2.1.2计算电流调节参数 (2) 2.1.3校验近似条件 (3) 2.2转速调节器的设计 (4) 2.2.1电流环等效时间常数: (4) 2.2.2转速环截止频率为 (5) 2.2.3计算控制器的电阻电容值 (5) 第3章仿真模块 (6) 3.1电流环模块 (6) 3.2转速环模块 (6) 第4章仿真结果 (7) 4.1电流环仿真结果 (7) 4.2转速环仿真结果 (7) 4.4稳定性指标的分析 (8) 4.4.1电流环的稳定性 (8) 4.4.2转速环的稳定性 (8) 结论 (9) 参考文献 (10)
第1章双闭环系统分析 1.1系统介绍 整流电路可从很多角度进行分类,主要分类方法是:按组成的器件可分为不可控,半控和全控三种;按电路结构可分为桥式电路和零式电路;按交流输入相数分可分为单相、双相、三相和多相电路;按控制方法又可分为相控整流和斩波控制整流电路。 本系统采用的是三相全控桥式晶闸管相控整流电路。这是因为电机容量相对较大,并且要求直流脉动小、容易滤波。其交流侧由三相电网直接供电,直流侧输出脉动很小的直流电。在分析时把直流电机当成阻感性加反电势负载。因为电机电流连续所以分析方法与阻感性负载相同,各参量计算公式亦相同。 1.2系统原理 ASR(速度调节器)根据速度指令Un*和速度反馈Un的偏差进行调节,其输出是电流指令的给定信号Ui*(对于直流电动机来说,控制电枢电流就是控制电磁转矩,相应的可以调速)。 ACR(电流调节器)根据Ui*和电流反馈Ui的偏差进行调节,其输出是UPE(功率变换器件的)的控制信号Uc。进而调节UPE的输出,即电机的电枢电压,由于转速不能突变,电枢电压改变后,电枢电流跟着发生变化,相应的电磁转矩也跟着变化,由Te-TL=Jdn/dt,只要Te与TL不相等转速会相应的变化。整个过程到电枢电流产生的转矩与负载转矩达到平衡,转速不变后,达到稳定。 1.3双闭环的优点 双闭环调速系统属于多环控制系统,每一环都有调节器,构成一个完整的闭环系统。工程设计方法遵循先内环后外环的原则。步骤为:先设计电流环(内环),对其进行必要的变换和近似处理,然后依照电流环的控制要求确定把它校正成哪一种典型系统,再根据控制对象确定其调节器的类型,最后根据动态性能指标的要求来确定其调节器的有关参数。电流环设计完成以后,把电流环看成转速环(外环)中的一个环节,再用同样的方法设计转速环。 在电流检测信号中常有交流分量,为了不让它影响调节器的输入,加入了低通滤波器,然而滤波环节可以使反馈信号延迟,为了消除此延迟在给定位置加一个相同时间常数的惯性环节。同理,由测速发电机得到的转速反馈电压常含有换向纹波,因此也在给定和反馈环节加入滤波环节。
基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计 蓝光激光头精细位置调节存有问题,论文为解决上述问题,首先使用机器视觉技术,捕捉到蓝光光斑区域,针对光斑及水平间差距做出分析,在精确且具体的2轴运动控制协助下,达到激光头平面水平放置的效果;紧接着明确光斑焦距,并分析所在区域,考虑到3轴精细运动联动实际情况,找到激光头空间区域,同时还包括焦距所处区域,继而全自动倾斜调整蓝光激光头,改良了蓝光激光头模块产品,达标率超过98%。 【Abstract】There is a problem in blue ray laser head fine position adjustment,to solve the above problem,the paper firstly uses machine vision technology to capture the blue light spot area,analyzes the spot and horizontal gap,it achieved laser head level laying in horizontal placement with the control assistance of accurate and specific 2-axis motion,clear spot focal length,and analyze the area,taking into account the actual situation of 3-axis fine motion linkage,find the laser head space area,also include the area of focal length,then automatically tilt adjust blu-ray laser head,to improve blu-ray laser head module products,the compliance rate is more than 98%. 标签:机器视觉;运动控制;蓝光激光头 1 引言 光碟生产商Singulus2013年9月13日宣称:“用于存储4K内容、容量为100GB的蓝光光碟已经问世”。数字式光盘的优点突出,存储容量大,速度快,且生命周期长,改变了以往包括硬盘及磁带等为存储记录的媒体形式,得到大范围应用。对于信息其是借助光学激光头来开展写入及读出工作的,其中,蓝光光学头构成了高清信息读取不可缺少的部件,其性能所起作用较大,较大程度上影响了光盘存储器性能优劣。在蓝光光学头性能许多调整及检测工作中,尤以倾斜调整检测最为突出,确保了光盘信号的读取无误,国内生产着世界范围内最大量的光盘产品,光盘产业构成了我国信息产业十分必要的环节[1]。上述倾斜调整检查设备的研发商均是外国厂家,成本价格较贵,对国内光盘产业整体发展无益,使得光学头生产企业受制于国外技术设备,所以,考虑到上述情况,进行本次研究,旨在分析基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统的设计。 2 总体设计基于机器视觉与运动控制的蓝光激光头全自动倾斜调整系统 蓝光激光头全自动倾斜调整系统研发涵盖了多个层面内容,包括CCD机器视觉光斑定位与焦距调节设计及多轴运动控制伺服系统等,这种检测设备具有全自动化且精细的特点[2]。这种系统硬件以机械机构及计算机为主要构成部分,机械机构组成部分包括电机、传感器及气动装置等;计算机处置机器视觉图像,精细化调控多轴运动,且对焊接装置及气动装置实施调控。
基于单片机的烘箱温度控制器设计 目录 1.项目概述 (1) 1.1.该设计的目的及意义 (1) 1.2.该设计的技术指标 (2) 2.系统设计 (3) 2.1.设计思想 (3) 2.2.方案可行性分析 (4) 2.3.总体方案 (5) 3.硬件设计 (6) 3.1.硬件电路的工作原理 (6) 3.2.参数计算 (7) 4.软件设计 (8) 4.1.软件设计思想 (8) 4.2.程序流程图 (9) 4.3.程序清单 (10) 5.系统仿真与调试 (11) 5.1.实际调试或仿真数据分析 (11) 5.2.分析结果 (13) 6.结论 (12) 7.参考文献 (13) 8.附录 (14)
1.项目概述: 1.1.该设计的目的及意义 温度的测量及控制,随着社会的发展,已经变得越来越重要。而温度是生产过程和科学实验中普遍而且重要的物理参数,准确测量和有效控制温度是优质,高产,低耗和安全生产的重要条件。在工业的研制和生产中,为了保证生产过程的稳定运行并提高控制精度,采用微电子技术是重要的途径。它的作用主要是改善劳动条件,节约能源,防止生产和设备事故,以获得好的技术指标和经济效益。 而本设计正是为了保证生产过程的稳定运行并提高控制精度,采用以51系列单片机为控制核心,对温度进行控制,不仅具有控制方便、组态简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标。 通过本设计的实践,将以往学习的知识进行综合应用,是对知识的一次复习与升华,让以往的那些抽象的知识点在具体的实践中体现出来,更是对自己自身的挑战。 1.2.该设计的技术指标 设计并制作一个基于单片机的温度控制系统,能够对炉温进行控制。炉温可以在一定围由人工设定,并能在炉温变化时实现自动控制。若测量值高于温度设定围,由单片机发出控制信号,经过驱动电路使加热器停止工作。当温度低于设定值时,单片机发出一个控制信号,启动加热器。通过继电器的反复开启和关闭,使炉温保持在设定的温度围。 (1) 1KW 电炉加热(电阻丝),最度温度为120℃(软件实现) (2)恒温箱温度可设定,温度控制误差≦±2℃(软件实现PID) (3)实时显示温度和设置温度,显示精度为1℃(LED)。 (4)温度超过设置温度±5℃,发出超限报警,升温和降温过程不作要求。 (5)升温过程采用PID算法,控制器输出方式为PWM输出方式,降温采用自然冷却。 (6)功率电路220 VAC供电,强弱电气电隔离 2.系统设计 2.1.设计思想 以87C51单片机为整个温度控制系统的核心,为解决系统出现一时的死机的问题,需构建复位电路,来重新启动整个系统。要想控制温度,首席必须能够测量温度,就需要一温度传感器,将测量得到的温度传给单片机,经单片机处理后,去控制继电器等器件实现电炉的断与通来达到温度期望值,当温度超过设定上下限值时,可以通过中断信号,控制指示灯的亮灭,来提醒温
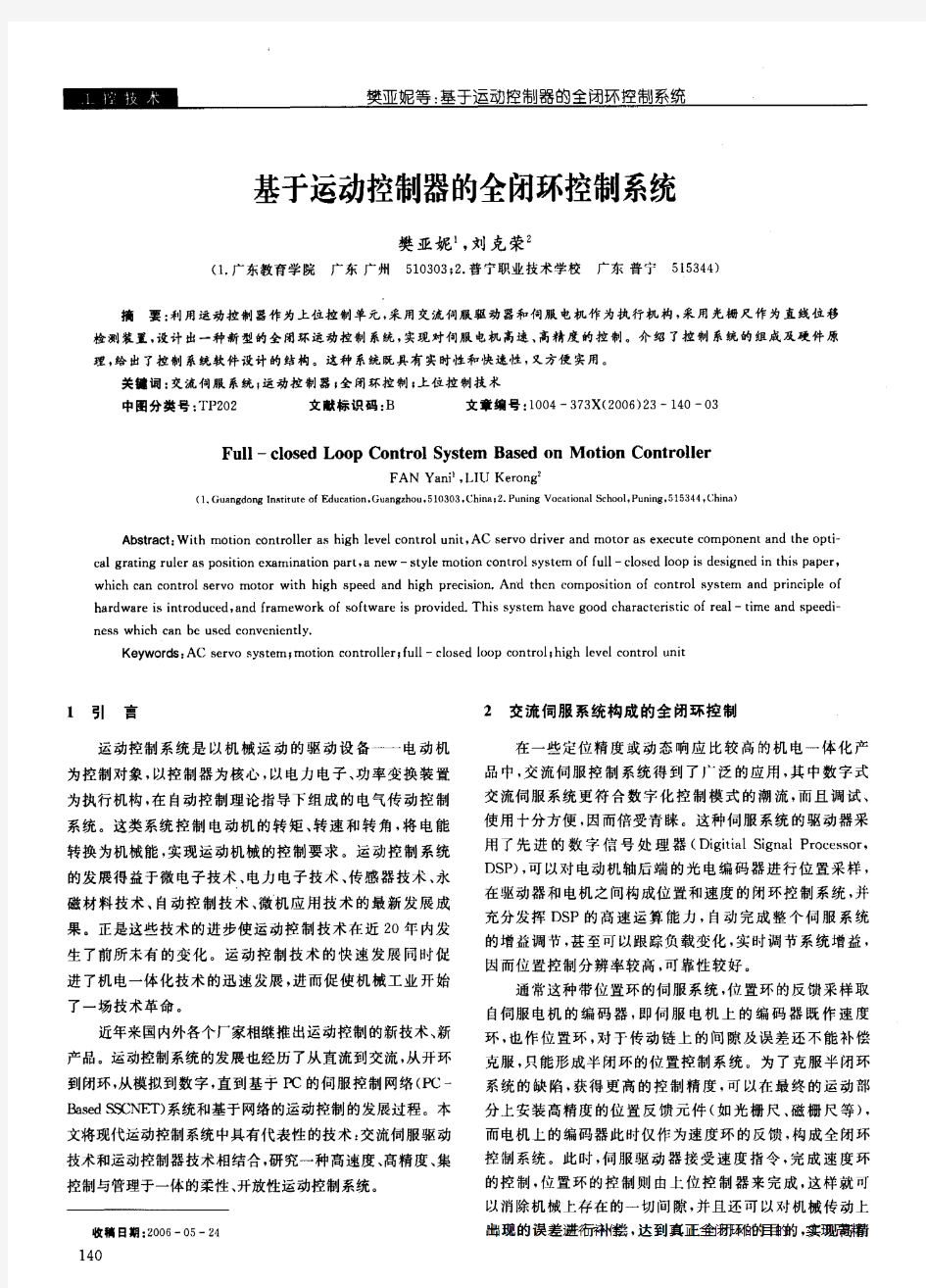
TB04-2372.jtdc-1 机器人控制标准包 机器人运动控制器 我们在机器人控制上拥有丰富的经验。除了标量机器人和2维并行机构的机器人是做为选项。其他机械机构的机器人我们提供了特殊控制技术。链接型和并行机构的机器人可以像自动机械一样运行。■优点 ◆有效运用于内部研发能够短期内使自己研发的产品稳定动作。 ◆追求独特的技术能够用于研发特殊组装和动作的机器人,并投入生产现场。◆技术知识保密自己开发技术知识的保密 ◆应用于自动机械可以应用于加工机械以及装配机械之类的生产机械的操作和运转 ■机构变换 ◆直交系列机器人◆标量机器人◆2维并行机构机器人◆垂直多关节机器人◆6维并行机构机器人 〈标准〉〈选项〉〈选项〉〈独特〉〈独特〉 ■正确的轮廓控制■按控制周期变换机构■正确的轨迹 按控制周期执行机构变换,实现插补之间的接合部的圆滑轨迹控制。可应用于精密加工。 ■运行程序(技术语言?G语言) 像去除加工毛刺及钻孔机械,使用输出CAM的G语言文件来实现DNC运行。 ■拥有丰富技能对应实际生产中的作业 通过可选项,能够用于搬运,加工,熔接,去除毛刺,装配等生产机械的操作和运行。◆可选项机能例 宏机能,多任务,扭矩指令(贴接?控制力度)DNC运行触摸屏 插补前的加减速S字加减速手动脉冲发动器,高精度制动开关(接触开关)接线?法线控制 同频同步平行轴控制■触摸屏及专用PC软件 ■触摸屏例 ■专用PC画面例 使用触摸屏或PC也可以操作。■动作机构计算的可2次开发 我们的经验可以对应您的特殊需求。 另外,你也可以自行开发动作机构变换软件。■应用于机器人控制的运动控制器◆SLM4000机器人规格 单板独立单机工作4轴脉冲列输入32 输出32RS232/USB ◆PLMC40机器人规格PLC动作 4轴脉冲列输入16输出16RS232可使用通用PLC扩展(梯形 ?IO? 模拟等) ◆PLMC-MⅡEX机器人规格MECHATROLINK-Ⅱ 标准4/9/16轴最大30轴可使用通用PLC扩展(梯形?IO?模拟等) ◆多軸运动功率放大器机器人规格多轴伺服功放一体型最大7轴输入42输出42可节省配线节省成本 A B a1 a2a3Accurate contour Uncontrolled path by simple positioning Calculation at each sampling time
引言 (1) 第一章系统方案论证 (2) 1.1 方案设计 (2) 1.2方案的对比论证 (2) 第二章系统硬件电路的设计 (4) 2.1电路总体原理框图 (4) 2.2单片机的选择 (5) 2.3单片机得管脚说明 (6) 2.4单片机的时钟电路 (8) 2.5复位电路及其复位状态 (9) 2.5.1 复位电路 (9) 2.5.2 复位状态 (10) 2.6.温度采集电路的设计 (11) 2.6.1 DS18B20特点介绍 (12) 2.7键盘接口电路的设计 (13) 2.8显示接口和报警电路的设计 (15) 2.9通信接口电路设计 (18) 2.9.1 max232原理 (18) 2.9.2 MAX232与单片机的接口电路 (18) 第三章软件系统的设计 (18) 3.1 主程序模块 (19) 3.2温度报警模块 (19) 3.3参考程序 (36) 3.4设计方案分析 (38) 3.4.1优点 (38) 3.4.2缺点 (38) 第四章硬、软件抗干扰技术 (39) 4.1 硬件抗干扰技术 (39) 4.1.1接地技术 (39) 4.1.2屏蔽系统 (40) 4.1.3隔离技术 (41) 4.1.4滤波技术 (41) 4.1.5 抑制反电势干扰技术 (41) 4.2 软件抗干扰技术 (42) 4.2.1 消除数据采集的干扰 (42) 4.2.2保持正常控制状态 (42) 第五章结论与前景分析 (46) 参考文献 (47) 致谢 (48) 附录 (49)
随着生产生活的需要,自动化控制越来越起到至关重要的作用。温度控制是工业生产过程中很普遍的过程控制,人们需要对各种加热炉,热处理炉,反应炉等锅炉中温度进行测量与控制。特别是冶金,化工、建材、食品、机械、石油等工业中,具有举足轻重的作用,其温度的控制效果直接影响着产品的质量,因而设计一种较为理想的温度控制系统是非常有价值的,工业生产中温度控制具有单向性、时滞性、大惯性和时变性的特征,同时要实现温度控制的快速性和准确性,对于对于提高产品质量具有很重要的意义。 对于不同的场所、不同的工艺、不同的产品所需要的温度范围不同、精度也不同,则采用的温度测量元件以及温度测量方法和控制方法都有所不同;产品工艺不同、温度控制的精度不同、时效不同,则对数据采集的精度和采用的控制算法也不同。因此对温度的控制方法要多种多样。随着电子技术和微型计算的迅速发展,微机测量和控制技术也得到了迅速的发展和广泛的应用。利用微机对温度进行测控的技术也随之而产生。现有的温度传感器大多为(热电偶)体积大,应用复杂,多为模拟信号,已经不在适合现代工业的灵活性要求了。 本设计是基于单片机的温度控制系统,为闭环系统,工作的可靠性高、精度高。本设计主要围绕单片机进行设计,从实际应用出发,选取了体积小、精度相对较高的数字式温度传感器件DS18B20作为温度采集装置,以单片机89S51作为主控芯片,1602作为显示输出,实现了对温度的实时测量,当温度超出设定范围系统将会自动调节加热或者降温系统,从而实现了实时恒温控制。
目录 摘要 0 双闭环流量比值控制系统设计 (1) 1、双闭环比值控制系统的原理与结构组成 (1) 2、课程设计使用的设备 (1) 3、比值系数的计算 (2) 4、设备投运步骤以及实验曲线结果 (2) 5、总结 (6) 6、参考文献 (6)
摘要 在许多生产过程中,工艺上常常要求两种或者两种以上的物料保持一定的比例关系。一旦比例失调,会影响生产的正常进行,造成产量下降,质量降低,能源浪费,环境污染,甚至造成安全事故。 这种自动保持两个或多个参数间比例关系的控制系统就是比值控制所要完成的任务。因此比值控制系统就是用于实现两个或两个以上物料保持一定比例关系的控制系统。需要保持一定比例关系的两种物料中,总有一种起主导作用的物料,称这种物料为主物料,另一种物料在控制过程中跟随主物料的变化而成比例的变化,这种无物料成为从物料。由于主,从物料均为流量参数,又分别成为主物料流量和从物料流量,通常,主物料流量用Q1表示,从物料流量用Q2表示,工艺上要求两物料的比值为K,即K=Q2/Q1.在比值控制精度要求较高而主物料Q1又允许控制的场合,很自然就想到对主物料也进行定值控制,这就形成了双闭环比值系统。在双闭环比值系统中,当主物料Q1受到干扰发生波动时,主物料回路对其进行定值控制,使从物料始终稳定在设定值附近,因此主物料回路是一个定值控制系统,而从物料回路是一个随动控制系统,主物料发生变化时,通过比值器的输出,使从物料回路控制器的设定值也发生变化,从而使从物料随着主物料的变化而成比例的变化。当从物料Q2受到干扰时,和单闭环控制系统一样,经过从物料回路的调节,使从物料稳定在比值器输出值上。双闭环比值控制系统由于实现了主物料Q1的定值控制,克服了干扰的影响,使主物料Q1变化平稳。当然与之成比例的从物料Q2变化也将比较平稳。根据双闭环比值控制系统的优点,它常用在主物料干扰比较频繁的场合,工艺上经常需要升降负荷的场合以及工艺上不允许负荷有较大波动的场合。本实验通过了解双闭环比值控制系统的原理与结构组成,进行双闭环流量比值控制系统设计(包括仪表选型)以及进行比值系数的计算,最后基于WinCC进行监控界面设计,给出不同参数下的响应曲线,根据扰动作用时,记录系统输出的响应曲线。
1. C200HW-NC模块使用的软件是什么? (1) 2. C200H的NC模块订购的时候带不带连接器? (1) 3. CS1W-NC/CJ1W-NC和C200HW-NC有什么区别? (1) 4.CJ1W-NC模块的型号是怎样命名的? (2) 5.CJ1W-NC、CS1W-NC系列模块使用的软件是什么? (2) 6.CJ/CS/的NC模块订购的时候带不带连接器? (2) 7. CS1W-NC/CJ1W-NC模块输出的最大频率为多少? (2) 1. C200HW-NC模块使用的软件是什么? 使用的软件是SYSMAC-NCT的软件。 2. C200H的NC模块订购的时候带不带连接器? 订购时都带了连接器,不需客户另外购买。 如果需要再购买, C200H的NC模块的连接器的型号是FCN-361J048-AU(焊接类型)和FCN-360C048-D(连接器封套)。 3. CS1W-NC/CJ1W-NC和C200HW-NC有什么区别?
4.CJ1W-NC模块的型号是怎样命名的? 型号命名规则如下: 5.CJ1W-NC、CS1W-NC系列模块使用的软件是什么? CJ1W-NC、CS1W-NC系列模块使用的软件是CX-position软件或CX-ONE软件包(内含CX-position软件)。这些模块也可以不用以上软件,可以通过设置DM区的数值来设置NC模块的参数。 6.CJ/CS/的NC模块订购的时候带不带连接器? 订购时都带了连接器,不需客户另外购买。 如果需要再购买,CJ的NC模块的连接器的型号是FCN-361J040-AU(焊接类型)和FCN-360C040-J2(连接器封套)。 7. CS1W-NC/CJ1W-NC模块输出的最大频率为多少? CS1W-NC/CJ1W-NC模块输出频率最大可以达到500KHz。
开环控制系统与闭环控制系统的区别及相关的实例 开环控制系统:不将控制的结果反馈回来影响当前控制的系统 举例:打开灯的开关——按下开关后的一瞬间,控制活动已经结束,灯是否亮起以对按开关的这个活动没有影响; 闭环控制系统:可以将控制的结果反馈回来与希望值比较,并根据它们的误差调整控制作用的系统 举例:调节水龙头——首先在头脑中对水流有一个期望的流量,水龙头打开后由眼睛观察现有的流量大小与期望值进行比较,并不断的用手进行调节形成一个反馈闭环控制;骑自行车——同理不断的修正行进的方向与速度形成闭环控制 开环闭环的区别:1、有无反馈;2、是否对当前控制起作用。开环控制一般是在瞬间就完成的控制活动,闭环控制一定会持续一定的时间,可以借此判断。 手动控制系统:必须在人的直接干预下才能完成控制任务的系统 自动控制系统:不需要有人干预就可按照期望规律或预定程序运行的控制系统 判断:骑自行车——人工闭环系统,导弹——自动闭环系统,人打开灯——人工开环系统,自动门、自动路灯——自动开环系统 开环控制系统方框图19例 开环控制系统的方框图: 1、水泵抽水控制系统 2、家用窗帘自动控制系统 3、宾馆自动门控制系统 4、楼道自动声控灯装置 控制量 控制量 控制量 控制量
5、游泳池定时注水控制系统 6、十字路口的红绿灯定时控制系统 7、公园音乐喷泉自动控制系统 8、自动升旗控制系统 9、宾馆火灾自动报警系统 10、宾馆自动叫醒服务系统 11、活动猴控制系统 控制量 控制量 控制量 控制量 控制量 控制量 控制量
12、公共汽车车门开关控制系统 14、普通电风扇控制系统 15、普通全自动洗衣机控制系统 16、手电筒控制装置 17、宾馆自动门加装压力传感器防意外事故自动控制系统 18、可调光台灯控制系统 控制量 (压缩空控制量 控制量 控制量 控制量 输入量 (压力传感器是否测到压力异常信号) 控制量 控制量
开题报告 电气工程与自动化 直流电动机双闭环控制系统设计与分析 一、选题的背景与意义 随着现代工业的快速发展,在调速领域中,双闭环的控制理念已经得到了越来越广泛的认同。由于其动态响应快,静态性能良好,抗干扰能力强,因而在工程设计中被广泛地采用[1]。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度[2]。 PID(即:比例-积分-微分)控制器是最早发展起来的控制理论之一,由于它具有算法结构简单、鲁棒性好、可靠性高等优点,在工业控制中90%是采用PID控制系统 [3]。然而,在越来越复杂的工业过程中,常常难以确定其精确数学模型,无法从理论上准确设计PID 控制器的相应参数。此外,在实际的生产现场过程中,由于受到现场环境及运行工况的变化等因素的困扰,常规的PID设计方法往往整定欠佳,性能不良,对运行工况的适应性较差,很难满足对生产过程的控制性能和产品质量的要求。 群体智能算法(Swarm Intelligence Algorithm) [4]是近十几年发展起来的智能仿生算法,其基本思想是模拟自然界生物的群体行为来构造随机优化算法。其中由美国学者Kennedy 和Eberha提出的粒子群优化算法(particle swarill optimization,PSO) 计算快速收敛,不易陷入局部最优,而且所需参数少且易于实现。因此,粒子群及改进的粒子群优化算法在PID参数整定中的应用近几年也得到了极大关注和重视。 二、研究的基本内容与拟解决的主要问题: 1、基本内容 本课题主要研究直流电动机双闭环控制系统设计与分析,并通过粒子群优化算法(PSO)用于双闭环PID调节控制的方法对系统进行设计和仿真。 双闭环PID控制系统设置了转速调节器(ASR)和电流调节器(ACR), 分别调节转速和电流, 两者实行串级连接, 且都带有输出限幅电路。由于调速系统的主要被控量是转速, 故把转速环作为外环, 以抑制电网电压扰动对于转速的影响, 把由电流环作为内环, 以实现在最大 电流约束下的转速过渡过程最快最优控制。直流电动机双闭环控制系统原理见图1所示。 III
运动控制器的应用现状及其发展趋势 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、数控系统、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 1运动控制器的应用现状 运动控制器越来越广泛地应用于各个行业的自动化设备,如数控机床、雕刻机、切割机、钻孔机、印刷机、冲孔机、激光雕刻、激光切割、包装机、纺织机、食品加工、绘图机、点胶机、焊接机、电子装配白动检测等,甚至在航空航天和国防领域也得到广泛应用。根据所用的CPU不同,运动控制器产品主要有以下五种类型: (1)以单片机(MCU)为核心的运动控制器,低端采用8位或16位的单片机作为处理器,其主要优点是价格比较低廉,缺点是运行速度较慢,控制精度较低。因此这种运动控制器适用于一些低速或运动控制精度要求不高的点位运动或轮廓运动控制的自动化设备。 (2)以专用芯片为核心的运动控制器,美国国家半导体公司生产的LM628和LM629专用运动控制芯片,日本的NOVA生产的MCX304、MCX501等运动控制芯片是专门为精密控制步进电机和伺服电机而设计的专用处理器,产品应用于数控机床、雕刻机、工业机器人、医用设备、绕线机、自动仓库、绘图仪、点胶机、IC制造设备等领域。 (3)以数字信号处理器(DS)为核心的运动控制器,美国DeltaTau公司生产的PMAC 运动控制器,采用Motorola的DSP56003作为处理器。国内的基于DSP的运动控制器,通常以美国TI公司推出的C2000系列,例如TMS320F2812和TMS320F28335作为运动控制器的核心芯片。