用单片机处理GPS数据---程序实例
- 格式:pdf
- 大小:408.72 KB
- 文档页数:17
GPS自动授时数码管显示程序#include "reg52.h"#define LEDPORT P0sbit D1=P3^4;sbit D2=P3^5;sbit D3=P3^6;sbit D4=P3^7;sbit LED=P2^5;sbit CLK=P2^1;sbit IO=P2^2;sbit RST=P2^3;sbit ACC0=ACC^0;sbit ACC7=ACC^7;unsigned char flash;unsigned char dp=0xff;bit rev_start,rev_stop;unsigned char code tab[]={0xA0,0xBE,0x64,0x2C,0x3A,0x29,0x21,0xBC,0x20,0x28,0xff };//数码管码表unsigned char buf[80]; //请把GPS那货发来的数据放到我的肚子里void TimerInit(){TMOD=0x21;TH0 = 0xF1; //4ms左右TL0 = 0x9A;EA=1;ET0=1;TR0=1;SCON = 0x50; //使用串行工作方式1,10位异步收发8位数据,波特率可变(由T1的溢出率控制)TH1 = 0xFD; //9600波特率的初值TL1 = TH1; //9600波特率的初值ES = 1;TR1 = 1;}void inputbyte(unsigned char ucDa){unsigned char i;ACC = ucDa;for(i=8; i>0; i--){IO = ACC0; //相当于汇编中的RRCCLK = 1;CLK = 0;ACC = ACC >> 1;}}unsigned char outputbyte(void){unsigned char i;for(i=8; i>0; i--){ACC = ACC >>1; //相当于汇编中的RRCACC7 = IO;CLK = 1;CLK = 0;}return(ACC);}/************************************************************** ******** 名称: v_W1302* 说明: 先写地址,后写命令/数据* 功能: 往DS1302写入数据* 调用: v_RTinputbyte()* 输入: ucAddr: DS1302地址, ucDa: 要写的数据* 返回值: 无*************************************************************** ********/ void write(unsigned char ucAddr, unsigned char ucDa) {RST = 0;CLK = 0;RST = 1;inputbyte(ucAddr); //地址,命令inputbyte(ucDa); //写1Byte数据CLK = 1;RST =0;}/************************************************************** ******** 名称: uc_R1302* 说明: 先写地址,后读命令/数据* 功能: 读取DS1302某地址的数据* 调用: v_RTinputbyte() , uc_RToutputbyte()* 输入: ucAddr: DS1302地址* 返回值: ucDa :读取的数据*************************************************************** ********/ unsigned char read(unsigned char ucAddr) {unsigned char ucDa;RST = 0;CLK = 0;RST = 1;inputbyte(ucAddr); //地址,命令ucDa = outputbyte(); //读1Byte数据CLK = 1;RST =0;return(ucDa);}void DS1302_init(){if(read(0xc1)!=0x82) //如果1302掉电,写入下面的初始值{write(0x8e,0x00);//关闭写保护write(0x80,0x00); //设置秒write(0x82,0x00);//设置分钟write(0x84,0x00); // 小时write(0x90,0xa5);//涓流充电write(0xc0,0x81);//掉电标志位}}void Display(unsigned char hour,min) //数码管显示{static unsigned char i;LEDPORT=0xff;switch (i){case 0: if(hour/16) LEDPORT=tab[hour/16]&dp else LEDPORT=tab[10]&dpD1=0;D2=D3=D4=1; break;case 1: LEDPORT=tab[hour%16]; D2=0;D1=D3=D4=1; break;case 2: LEDPORT=tab[min/16]; D3=0;D1=D2=D4=1; break;case 3: LEDPORT=tab[min%16]; D4=0;D2=D3=D1=1; break;}i++;if(i==4)i=0;}void main(){unsigned char hour,min,sec;TimerInit();DS1302_init();while(1){if((rev_stop==1)&&(buf[5]=='C'))//如果接收到GPRMC{ES=0;if(buf[18]=='A')//如果GPS成功定位{dp=0xdf; //点亮第一位数码管的小数点hour= (buf [7]-0x30)* 16+ buf[8] -0x30;min= (buf [9]-0x30)* 16+ buf[10]-0x30;sec= (buf[11]-0x30)* 16+ buf[12]-0x30;hour= hour / 16 * 10 + hour % 16;hour= (hour+8) % 24; //UTC Time换算成北京时间hour=hour/10*16+hour%10;if(sec!=read(0x81)||min!=read(0x83)||hour!=read(0x85))//如果GPS标准时间与DS1302不同就修正{write(0x84,hour);write(0x82,min);write(0x80,sec);}}elsedp=0xff; //如果不能成功定位,就把第一位数码管的小数点干掉ES=1;rev_stop=0;}if(flash>=250) {flash=0; LED=!LED; } //亲,您要不停的按电灯开关,1秒钟1次哦!}}void Timer0() interrupt 1{TH0 = 0xF1;TL0 = 0x9A;Display(read(0x85),read(0x83));//定时器兄弟简单而单调的工作,很轻松的。
车辆实时定位方案随着物联网技术的发展, 实时定位系统广泛应用于车辆管理、路况监控、紧急救援等领域。
本文将介绍一种车辆实时定位的方案,详细说明其设计过程、原理以及实现方法。
方案概述本方案采用GPS定位技术,结合GPRS/4G网络通信,实现车辆的实时定位。
具体实现流程如下:1.车辆装有GPS设备,以及SIM卡。
2.GPS设备获取车辆的位置信息,并通过GPRS/4G网络上传至服务器。
3.服务器接收到GPS数据后,进行解析和计算,得到车辆的实时位置。
4.用户通过Web或移动端的应用程序,查询车辆的位置信息。
设计原理GPS定位技术是本方案的核心。
GPS(Global Positioning System) 全球卫星定位系统,是一种卫星导航系统,由美国政府运营。
该系统由一组卫星、地面控制站以及用户接收设备组成。
通过GPS设备接收到卫星发射的位置信号,就能够确定设备的位置。
GPS定位的优点是定位精度高、覆盖面广,可以全球范围内进行位置定位。
本方案采用GPS模块与单片机相结合的硬件设计,用MCU(Micro Control Unit)来采集GPS数据。
MCU通过串口中断方式接收GPS发送的NMEA协议格式数据,并通过GPRS/4G网络上传到云服务器。
服务器解析接收到的GPS数据,并得到了定位信息,即车辆的实时位置。
实现方法硬件部分1.GPS模块:采用U-blox公司的GPS模块进行定位。
2.单片机:采用STM32F103C8T6单片机进行数据采集。
3.SIM卡:使用3G/4G通信模块,需要插入支持GPRS/4G通信的SIM卡。
4.电源:使用汽车电瓶或者另加电源模块进行供电。
软件部分1.GPS模块驱动程序:根据U-blox公司提供的硬件接口手册来编写GPS模块的驱动程序。
2.数据上传程序:将GPS数据通过GPRS/4G网络上传至服务器。
3.服务器数据解析程序:解析上传的GPS数据,并把解析的数据存储在数据库中。
4.用户查询程序:Web或移动端应用程序,用于查询车辆的位置信息。
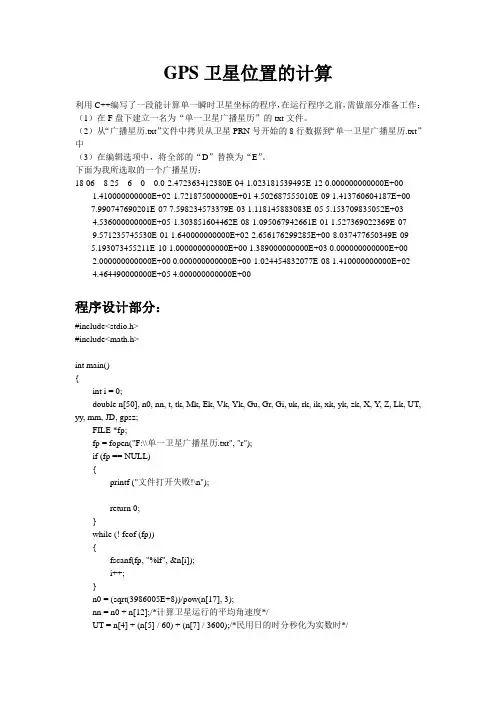
GPS卫星位置的计算利用C++编写了一段能计算单一瞬时卫星坐标的程序,在运行程序之前,需做部分准备工作:(1)在F盘下建立一名为“单一卫星广播星历”的txt文件。
(2)从“广播星历.txt”文件中拷贝从卫星PRN号开始的8行数据到“单一卫星广播星历.txt”中(3)在编辑选项中,将全部的“D”替换为“E”。
下面为我所选取的一个广播星历:18 06 8 25 6 0 0.0-2.472363412380E-04-1.023*********E-12 0.000000000000E+001.410000000000E+02-1.721875000000E+01 4.502687555010E-09 1.413760604187E+00-7.990747690201E-07 7.598234573379E-03 1.118145883083E-05 5.153709835052E+034.536000000000E+05-1.303851604462E-08-1.095067942661E-01 1.527369022369E-079.571235745530E-01 1.640000000000E+02-2.656176299285E+00-8.0374********E-09-5.193073455211E-10 1.000000000000E+00 1.389000000000E+03 0.000000000000E+002.000000000000E+00 0.000000000000E+00-1.024*********E-08 1.410000000000E+024.464490000000E+05 4.000000000000E+00程序设计部分:#include<stdio.h>#include<math.h>int main(){int i = 0;double n[50], n0, nn, t, tk, Mk, Ek, Vk, Yk, Gu, Gr, Gi, uk, rk, ik, xk, yk, zk, X, Y, Z, Lk, UT, yy, mm, JD, gpsz;FILE *fp;fp = fopen("F:\\单一卫星广播星历.txt", "r");if (fp == NULL){printf ("文件打开失败!\n");return 0;}while (! feof (fp)){fscanf(fp, "%lf", &n[i]);i++;}n0 = (sqrt(3986005E+8))/pow(n[17], 3);nn = n0 + n[12];/*计算卫星运行的平均角速度*/UT = n[4] + (n[5] / 60) + (n[7] / 3600);/*民用日的时分秒化为实数时*/if (n[1] >= 80)/*广播星历中年只有后两位,化为4位,参考1980年1月6日0点*/ {if (n[1] == 80 && n[2] == 1 && n[3] < 6){n[1] = n[1] + 2000;}n[1] = n[1] + 1900;}else{n[1] = n[1] + 2000;}if (n[2] <= 2){yy = n[1] - 1;mm = n[2] + 12;}if (n[2] > 2){yy = n[1];mm = n[2];}JD = (int)(365.25 * yy) + (int)(30.6001 * (mm + 1)) + n[3] + (UT / 24) + 1720981.5;/*化为儒略日*/gpsz = (int)((JD - 2444244.5) / 7);/*计算GPS周*/t = (JD - 2444244.5 - 7 * gpsz) * 24 * 3600;/*得出GPS秒*/tk = t - n[18];/*tk1为中间值,用以判断tk与正负302400的关系,然后返回到tk上*/ while (tk > 302400 || tk < -302400){if (tk > 302400){tk = tk - 604800;}else{tk = tk + 604800;}}/*计算归化观测时间*/Mk = n[13] + nn * tk;/*观测时刻的卫星平近点角*/Ek = Mk;Ek = Mk + n[15] * sin(Ek);Ek = Mk + n[15] * sin(Ek);/*迭代两次计算观测时刻的偏近点角*/Vk = atan(sqrt(1 - n[15] * n[15]) * sin(Ek)) / (cos(Ek) - n[15]);/*真近点角*/Yk = Vk + n[24];/*升交距角*/Gu = n[14] * cos(2 * Yk) + n[16] * sin(2 * Yk);Gr = n[23] * cos(2 * Yk) + n[11] * sin(2 * Yk);Gi = n[19] * cos(2 * Yk) + n[21] * sin(2 * Yk);/*摄动改正项*/uk = Yk + Gu;rk = n[17] * n[17] * (1 - n[15] * cos(Ek)) + Gr;ik = n[22] + Gi + n[26] * tk;/*经摄动改正后的升交距角、卫星矢径、轨道倾角*/xk = rk * cos(uk);yk = rk * sin(uk);zk = 0;/*卫星在轨道坐标系的坐标*/Lk = n[20] + (n[25] - 7.29211515E-5) * tk - 7.29211515E-5 * n[18];/*观测时刻t的升交点经度*/X = xk * cos(Lk) - yk * cos(ik) * sin(Lk);Y = xk * sin(Lk) + yk * cos(ik) * cos(Lk);Z = yk * sin(ik);/*卫星在WGS-84坐标系的坐标*/printf("该卫星在WGS-84坐标系中的坐标为:\nX = %lf m\nY = %lf m\nZ = %lf m\n", X, Y, Z);fclose(fp);return 0;}计算结果:该卫星在WGS-84坐标系中的坐标为:X = 9223153.692525 mY = 24133486.931401 mZ = 6032585.919385 m。
如何使用gps模块?从头到尾,详细讲解和程序说明GPS 模块是全球定位系统的一种实现方式,是一种位置信息获取的设备。
GPS 模块通过透过设备信号,可将设备所在的位置、速度和时间等信息准确传达给用户。
GPS 模块的使用主要包括以下几个步骤:1. 确认 GPS 模块和设备连接正常在开始使用 GPS 模块前,需要先确认 GPS 模块和设备之间的连接是否稳定。
这一步需要确认各种接口是否正确连接并且是否适合使用。
2. 配置 GPS 模块GPS 模块需要进行配置后才能正常使用,因为不同的模块具有不同的协议,所以需要根据模块的使用手册进行配置。
配置可以通过串口通信实现,用户需要根据模块的指令手册完成配置。
3. 获取位置信息当 GPS 模块已经连接并且配置完成后,就可以开始获取位置信息了。
使用 GPS 模块的淘宝例程来获取经度和纬度:```arduino#include <TinyGPS++.h> // 导入 TinyGPS++ 的库TinyGPSPlus gps;void loop() {while (Serial.available()) {gps.encode(Serial.read());}if (gps.location.isUpdated()) { // 检测是否更新Serial.print("Latitude= ");Serial.print(t(), 6);Serial.print(" Longitude= ");Serial.println(gps.location.lng(), 6);}delay(1000);}```上述程序首先导入 TinyGPS++ 的库,然后初始化 TinyGPSPlus 对象。
在主循环中,使用 `Serial.available()` 检测串口是否有数据,然后调用 `gps.encode()` 来解码接收到的数据。
简述gps数据处理基本流程和步骤GPS(全球定位系统)数据处理是将采集到的GPS信息进行处理和分析,从而得出有用的信息和结果的过程。
GPS数据处理基本流程可以分为数据采集、数据预处理、数据分析和结果展示四个步骤。
下面将分别介绍这四个步骤的具体内容。
首先是数据采集阶段。
GPS数据的采集是通过GPS接收器获得,GPS接收器可以测量卫星信号和计算位置、速度、时间、姿态等信息。
GPS接收器具有天线接收GPS信号,接收到的信号包括卫星信号和地面干扰信号,卫星信号是由美国国家航空航天局的卫星发出的,地面干扰信号则是由城市的建筑物、树木等形成的。
接收到的信号会被GPS 接收器搜集并保存下来,形成GPS原始数据。
接着是数据预处理阶段。
在数据预处理阶段,需要对采集到的GPS 原始数据进行清洗和筛选。
清洗就是对数据进行去噪声,去除异常值等处理,保证数据的准确性和可靠性。
筛选则是对数据进行筛选,选择需要的数据进行后续处理。
此外,还需要对数据进行校正,如时钟误差校正、电离层延迟校正等,保证数据的精度和稳定性。
然后是数据分析阶段。
数据分析是对预处理过的GPS数据进行处理和分析,从中提取有用的信息。
主要包括轨迹重建、速度计算、加速度计算、路网匹配等过程。
轨迹重建是将GPS数据点连接成轨迹,并对轨迹进行分段处理。
速度计算是根据轨迹数据计算车辆的速度,加速度计算是根据速度数据计算车辆的加速度。
路网匹配是将轨迹数据匹配到实际的道路上,得到车辆在道路上的行驶轨迹。
最后是结果展示阶段。
在结果展示阶段,将数据分析得到的结果以可视化的方式展示出来,使用户能够直观地了解分析结果。
主要包括轨迹图、速度图、加速度图、轨迹匹配图等展示方式。
公路交通部门可以通过这些展示结果了解车辆的行驶轨迹、行驶速度和行驶状态,为交通管理和规划提供有力的数据支持。
综上所述,GPS数据处理的基本流程包括数据采集、数据预处理、数据分析和结果展示四个步骤。
在实际应用中,每个步骤都需要仔细处理和精心设计,才能得到准确、可靠的分析结果。
基于单片机的GPS接收机设计作者:陈铁来源:《消费电子·理论版》2013年第08期摘要:采用单片机实现GPS接收机方案,实现了数据的接收、处理和液晶显示,给出了系统实现原理图和程序流程图,对原理做了详细说明。
关键词:GPS;16450;液晶显示中图分类号:TN85 文献标识码:A 文章编号:1674-7712 (2013) 16-0000-02全球定位系统(Global Positioning System,GPS)是美国从20世纪70年代开始研制,于1994年全面建成,以接收导航卫星信号为基础的非自主式导航与定位系统。
它以全球覆盖、全天候、连续实时提供高精度的三维位置、三维速度和时间信息的能力,很好地解决了人类导航和定位问题。
随着全球定位系统的不断改进,软硬件的不断完善,应用领域正在不断的开拓,无论在军事还是民用领域都得到广泛地应用和发展。
实际应用中,GPS接收机收到轨道卫星的信号后,经过解调输出的,是标准格式的GPS定位数据,该数据必须经过进一步处理,才能在用户数据终端上显示。
一、接收机硬件设计系统采用AT89S51单片机作微控制器,用GPS_GB10接收模块接收轨道卫星的信号,经GPS信号处理后用16450进行串并转换,通过数据总线传给CPU,再经8255发送给LCD显示,系统结构如图1所示。
(一)控制单元由于单片机芯片数据存储容量不足,用6264扩展8K外部数据存储单元来临时存储接收的GPS数据,用74LS138译码器产生GPS与液晶的片选信号,同时用74LS373对数据进行锁存,以实现单片机P0口的数据地址复用。
原理图如图2所示。
(二)GPS数据接收部分GPS模块GB10接收多颗卫星的定位信息,进行处理后按一定的格式输出串行数据,16450实现串并转换,通过总线与单片机通信。
GPS接收模块默认设置输出为:(三)液晶显示液晶显示部分采用OCMJ2*8A汉字图形液晶显示模块,用并行总线方式通过8255与单片机连接,显示速度较快。
基于PIC单片机和GPS接收模块的手持式GPS定位系统1 引言GPS以其高精度,全天候,全球覆盖,方便灵活和优质价廉吸引全世界许多用户。
GPS 的广泛应用改变了人们的工作方式,提高工作效率,带来巨大的经济效益。
这里提出一种基于EM411GPS接收模块和PIC18F2550单片机的手持式GPS定位系统设计方案。
该系统采用点阵字符液晶屏显示接收GPS卫星数据,并用SD卡记录所接收到的GPS信息,从而实现GPS数据导入电子地图。
2 NEMA协议简介目前,GPS采用NMEA-0183协议做为发送和接收数据的标准,NMEA-0183是美国国家海洋电子协会(NationalMarine ElectroNIcs Association)为统一海洋导航规范而制定的标准,该格式标准已成为国际通用的一种格式,协议内容在兼容NMEA-180和NMEA-0182的基础上。
增加了GPS、测深仪、罗经方位系统等多种设备接口和通讯协议定义,同时还允许一些特定厂商对其设备通信自定协议。
NMEA-0183格式数据串的所有数据都采用ASCⅡ文本字符表示,数据传输以“$”开头,后面是语句头。
语句头由5个字母组成。
其前2个字母表示“系统ID”,即表示该语句是属于何种系统或设备,例如GP表示该语句属于GPS 定位系统,HC表示该语句属于罗经方位系统; 后3个字母表示“语句ID“,表示该语句是关于何方面的数据。
语句头后是数据体,包含不同的数据体字段,语句末尾为校验码(可选),以回车换行符《CR》《LF》结束,也就是ACSII字符“回车”(十六进制的0D)和“换行”(十六进制的0A)。
数据字段以逗号分隔识别,空字段保留逗号。
在GPS系统中常用语句有GPGGA(GPS定位信息),GPGSA(当前卫星信息),GPGSV(可见卫星信息),GPRMC (推荐定位信息),GPGLL(定位地理信息),GPVTG(地面速度信息)等。
GPS数据传输是以标准异步串行方式发送,其串行通信波特率为4 800 b/s、数据位8位、停止位1位、无奇偶校验位。
GPS模块使用说明一、模块简介该 GPS模块采纳瑞士 u-blox 公司的 NEO-5Q 主芯片 ,此芯片为多功能独立型GPS模组 ,以 ROM 为基础架构 ,成本低 ,体积小 ,并拥有众多特征。
采纳u-blox 最新的KickStart 轻微信号攫取技术 ,能保证采纳此模组的设备在任何可接收到信号的地点及任何天线尺寸都可以有最正确的初始定位性能并进行快速定位。
1.主要特征 :50个通道卫星接收功能100万个以上的相关系引擎可同步追踪 GPS及伽俐略导航卫星信号供给多种接口 :UART,USB,IIC,SPI2.性能参数 :接收器种类 : 50 个接收通道GPS L1 频率 ,C/A 码SBAS:WAAS,EGNOS,MSAS,GAGAN启动时间 : 冷启动 29 sec热启动 <1 sec辅助启动 <1 sec初次定位时间 :<1 sec最大更新速率 :<4Hz敏捷度 : 冷启动 -144dBm追踪敏捷度 -160dBm捕捉敏捷度 -160dBm定位精度 : Auto < 2.5mSBAS < 2m准时精度 : RMS 30ns99% <60ns极限速度 : 500m/s运转温度 : -40~85℃封装尺寸 : 16×12.2×2.4 mm3.电气性能 :工作电压 : 2.7V~3.6V功耗: 全速模式 135mW @ 3.0VECO 模式 129mW @ 3.0V备用电池 : 1.4V~3.6V,25uA4.接口协议 :串行接口 : 1 UART 1 USB V2.0 全速 12Mbit/s 1 IIC 1 SPI其余接口 : 1 时间脉冲输出1外面中断输入协议: NMEA,UBX 二进制二、硬件连接GPS模块接口图UART(TTL 电平 : 1.VCC-VCC 2.GND-GND 3.TXD-P3.0 4.RXD-P3.1 IIC: 5.SDA 6.SCLUART(232 电平 :9.VCC 10.GND 11.TXD 12.RXDSPI: 13.MOSI 14.MISO 15.SCK 16.CS接口说明 :1.模块和单片机连接只用到UART(TTL 电平接口。
基于AT89C52单片机的液晶GPS定位仪的设计作者:余巧书来源:《电子世界》2012年第17期【摘要】随着科学技术的进步和电子技术的不断发展,单片机GPS定位仪越来越广泛地被运用到各个领域中,在一定程度上减小了人类传统的靠手去操作的劳动程度,提高了生活生产的效率,促使了农业和自然资源的可持续发展。
本文主要对AT89C52单片机的液晶GPS定位仪设计做进一步研讨。
【关键词】AT89C52单片机;液晶GPS;定位仪;设计GPS全球定位系统是利用美国24颗GPS卫星所发射的信息从而进行实时定位、导航和授时服务的导航系统。
该系统自上个世纪末面向世界全部免费开放以来,迅速地得到了各行各业的广泛推广和使用,比如监测、导航、车辆定位以及防盗系统等领域的应用。
本文主要介绍了AT89C52单片机的液晶GPS定位仪的设计方法。
一、GPS的系统(一)GPS系统的组成GPS系统主要包含着以下三个组成部分:空间部分、地面控制部分以及用户设备部分,即为GPS卫星星座、地面监控系统以及GPS信号接收机。
1.空间部分空间部分即是GPS工作卫星及其星座,它是由21颗工作卫星以及3颗备用卫星组成的,一般都记作(21+3)GPS星座。
24颗卫星均匀分布在6个轨道平面内,倾角为55°,各个轨道平面间相距为60°。
每个轨道平面内各卫星之间的升交角距相差度为90°,以轨道平面上的卫星比西边相邻轨道平面上的相应卫星超前30°。
位于20000公里高空里GPS卫星,如果地球完成自转一周,那么他们环绕地球运转的时间就是两周。
位于地平线上的卫星颗数随着时间和地点的差异而不尽相同,可见度低的时候就4颗,可见度较高的时候就是11颗。
在使用GPS信号导航定位时,为了得到三维坐标,就至少应该观察到4颗卫星。
当然,在定位的过程中,这4颗卫星的相对位置会对定位精确度产生一些影响。
对于不同时间和地段时,点位坐标定位的精准性得不到保证,我们称这一时间段为“间隙段”,但这一间隙段时间是相对短暂的,不会影响大范围内的地方全天候、高精度、连续定时定位导航。
基于GPS的数据采集处理系统设计作者:马兰, 袁卫来源:《现代电子技术》2010年第15期摘要:根据GPS定位系统的试验定位数据多、数据刷新速率快、试验周期长等特点,设计利用TI公司的MSP430低功耗单片机实现自动对GPS定位系统的定位数据进行采集、筛选、存储和计算,并将采集的数据通过串口转USB接口传送至计算机显示,以提高工作效率,并为评定其定位性能提供依据。
关键词:GPS; 单片机; 计算机; 数据采集中图分类号:P228.4文献标识码:A文章编号:1004-373X(2010)15-0171-02Design of Data Acquisition System Based on GPSMA Lan1,YUAN Wei2(1. Beijing Municipal Administration School, Beijing 102600, China; 2. Xidian University, Xi’an 710071, China)Abstract: According to GPS characteristics of more location data,faster data refresh rate and longer testing period, a circuit that uses MSP430 microcontroller to automatically achieve data acquisition, selection, storage and computation is designed. The collected data is sent to computer through the common serial interface via USB interface. A basis is provided for the assessment of its positioning performance.Keywords: GPS; MCU; computer; data acquisition0 引言GPS(Global Positioning System,全球卫星定位系统)以其高精度、全天候、全天时的特点,在定位、导航、测距、授时遥感等领域广泛应用,并得到了快速的发展[1]。
GPS测量操作与数据处理
GPS测量操作与数据处理是现代测量科学中十分重要的一个方面。
GPS(全球定位系统)是一种基于卫星导航的技术,通过接收来自卫星的信号来确定测量点的位置。
本文将介绍GPS测量操作的基本步骤,并讨论GPS数据的处理方法。
一、GPS测量操作
1.设备准备:首先,我们需要准备一台GPS接收器,通常是一个手持设备或安装在测量仪器上的设备。
确保设备电量足够,并检查所在位置的可见卫星数量和信号强度。
2.信号接收:打开GPS接收器并等待接收信号。
通常,接收器需要至少接收到4颗卫星的信号来确定测量点的位置。
一旦接收到足够的信号,接收器将开始计算位置。
3.数据记录:接收器会记录测量点的经纬度、海拔高度等信息。
在测量过程中,可以使用接收器的其他功能,例如记录测量点照片、声音等信息。
4.数据处理:一旦完成测量任务,需要将数据从GPS接收器传输到计算机上进行进一步处理。
二、GPS数据处理
1.数据导出:将GPS接收器中记录的数据导出到计算机上。
通常,可以通过USB或蓝牙等方式将数据传输到计算机。
3. 数据转换:将GPS数据转换为常用的地理坐标系统,例如经度和纬度坐标转换为平面坐标系统。
这一步骤通常需要使用专业的测绘软件,例如ArcGIS或AutoCAD等。
4.数据分析:根据具体的测量任务和需求对数据进行分析。
例如,可以计算测量点之间的距离、角度和高程差,或者绘制测量点的分布图、等高线图等。
5.数据可视化:利用数据处理软件绘制测量结果的图表和图像,以便更直观地展示数据。
这可以帮助用户更好地理解测量结果,并做出决策。