目录
一、设计题目 (2)
二、设计报告正文 (3)
摘要 (3)
关键词 (3)
(报告正文内容) (3)
三、设计总结 (22)
四、参考文献 (22)
一.设计题目
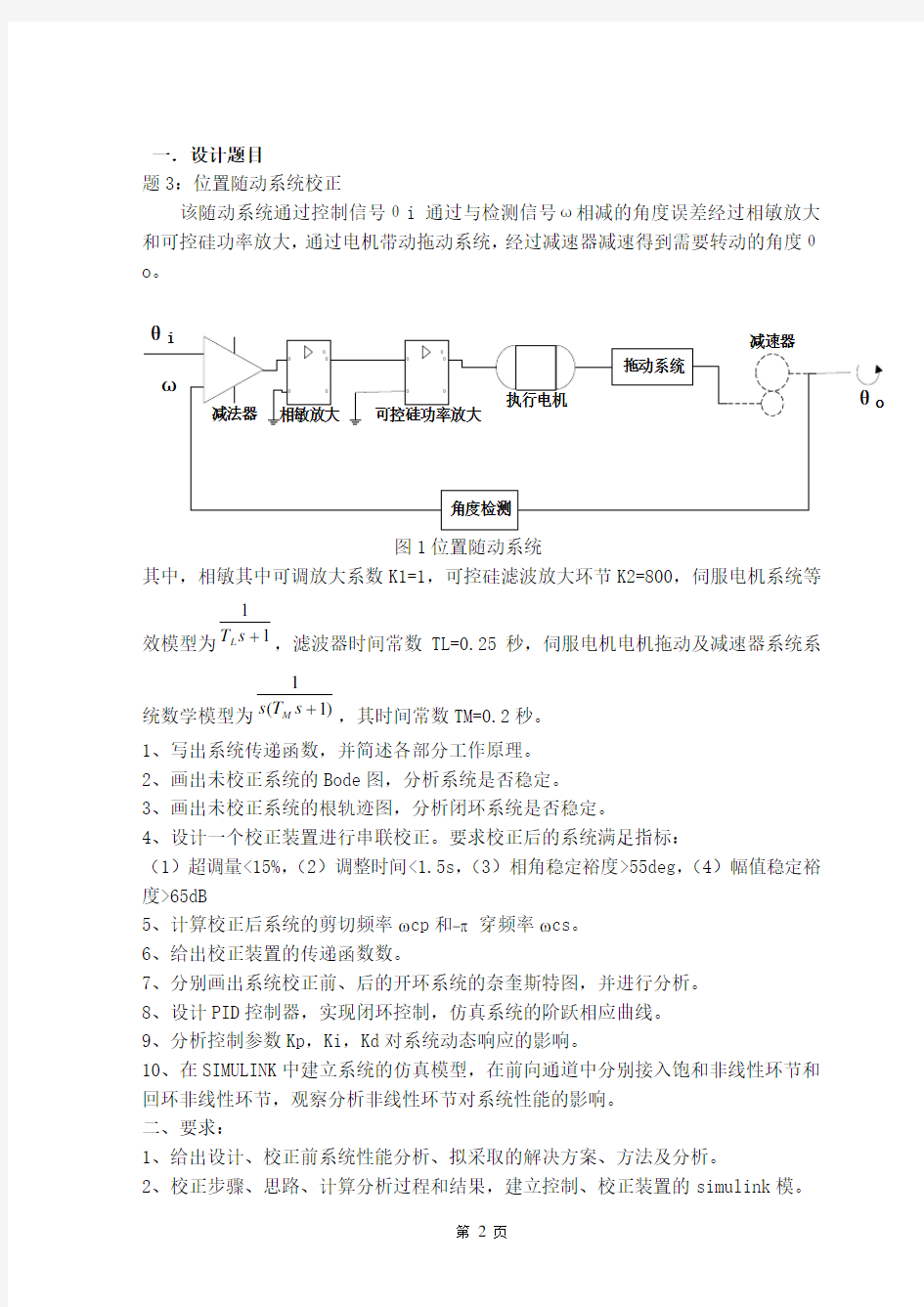
题3:位置随动系统校正
该随动系统通过控制信号θi 通过与检测信号ω相减的角度误差经过相敏放大和可控硅功率放大,通过电机带动拖动系统,经过减速器减速得到需要转动的角度θo 。
o
图1位置随动系统
其中,相敏其中可调放大系数K1=1,可控硅滤波放大环节K2=800,伺服电机系统等
效模型为1
1+s T L ,滤波器时间常数TL=0.25秒,伺服电机电机拖动及减速器系统系
统数学模型为)1(1
+s T s M ,其时间常数TM=0.2秒。
1、写出系统传递函数,并简述各部分工作原理。
2、画出未校正系统的Bode 图,分析系统是否稳定。
3、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
4、设计一个校正装置进行串联校正。要求校正后的系统满足指标:
(1)超调量<15%,(2)调整时间<1.5s ,(3)相角稳定裕度>55deg ,(4)幅值稳定裕度>65dB
5、计算校正后系统的剪切频率ωcp 和-π穿频率ωcs 。
6、给出校正装置的传递函数数。
7、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 8、设计PID 控制器,实现闭环控制,仿真系统的阶跃相应曲线。 9、分析控制参数Kp ,Ki ,Kd 对系统动态响应的影响。
10、在SIMULINK 中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响。 二、要求:
1、给出设计、校正前系统性能分析、拟采取的解决方案、方法及分析。
2、校正步骤、思路、计算分析过程和结果,建立控制、校正装置的simulink 模。
3、设计、校正结果验证。
4、PID 控制器设计及控制参数整定。
5、PID 与超前、滞后校正的关系。
6、分析非线性环节对系统性能的影响。
7、设计总结。对设计中遇到问题、知识点的总结,存在的主观、客观的问题和不足等。
二.设计报告正文
摘要:
随机系统是指系统的输出以一定的精度和速度跟踪输入的自动控制系统,并且输入量是随机的,不可预知的,只要解决有一定精度的位置跟随问题,如数控机床的刀具给进和工作的定位控制,工业机器人的工作动态,导弹制导,火炮瞄准等。控制技术的发展,使随动系统得到广泛的应用。
位置随动系统是反馈控制系统,是闭环控制,调速系统的给定量是恒值,希望输出量能稳定,因此系统的抗干扰能力往往显得十分重要。位置随动系统中的位置指令是经常变化的,要求输出量准确跟随给定量的变化,输出相应的快速性、灵活性和准确性成了位置随动系统的主要特征。简言之,调速系统的动态指标以抗干扰性能为主,随动系统的动态指标以跟随性能为主。
在控制系统的分析和设计中,首先要建立系统的数字模型。控制系统的数字模型是描述系统内部物理量(或变量)之间关系的数学表达式。在自动控制理论中,数学模型有多种形式。时域中常用的数学模型有微分方程、差分方程和状态方程:复数域中有传递函数、结构图:频域中有频率特性等。
本次课程设计研究的是位置随动系统的校正,并对其进行分析。用MATLAB 画系统bode 图,根轨迹图,奈奎斯特图,分析系统。设计PID 控制装置,实现闭环控制,并分析控制参数对系统的影响。
关键词:随机系统 滞后、超前校正校正 PID 控制
报告正文内容
1、写出系统传递函数,并简述各部分工作原理。 系统传递函数为:
()?
??? ??+???? ??+=11
11800)(S T S S T G M L s o
各部分工作原理:
减法器:将输入信号角度与反馈信号角度相减,得到偏差。并将偏差传递给相敏放大器。
相敏放大:将减法器输出的角度误差信号整流成直流信号,该信号不仅反映角差的大小,而且反映角差的极性。
可控硅功率放大:对控制信号进一步放大,使系统有足够的功率驱动执行电
机转动。
执行电机:把电信号转为机械运动,推动负载运动,并将运动传至拖动系统。
拖动系统:在自动控制系统中,做执行元件,将前面部件传来的电信号转换成电动机轴上的角位移或角速度输出。
减速器:减速器是通过机械传动装置来降低电机(马达)转速,从而得到所需检测的角度。
角度检测:将经减速器减速后得到的所需角度反馈到减法器使之与输入信号
比较。
系统工作原理:当控制信号与反馈信号不相同时,通过减法器得出角度偏差。将偏差输入相敏放大器,相敏放大器将该信号整流为直流信号,从而向下一级反映角度偏差的大小和极性。可控硅功率放大器对前级信号进一步进行功率放大,从而使放大信号驱动执行电动机。执行电机将收到的电信号转为机械运动,从而推动负载运动。最后,通过拖动系统带动减速器控制输出角度,从而逐渐使控制信号和检测信号的偏差角度减小。当控制信号与检测信号无角度误差时,电机停转,系统达到新的平衡状态。所以当检测信号任意变化时,控制系统均能保证控制信号与检测信号相差角度为零,即控制信号随检测信号任意变化,从而实现位置随动的目的。
2、画出未校正系统的Bode图,分析系统是否稳定。
本次课程设计采用MATLAB软件进行设计,通过对程序的调试与计算设计出理想的控制系统。
具体设计如下:
未校正系统的伯得图:
matlab程序源代码:
>>num=800;
>> den=conv([1,0],conv([0.25,1],[0.2,1]));
>> bode(num,den)
分析:由图可知,相角裕度小于零,所以该系统不稳定。
3、画出未校正系统的根轨迹图,分析闭环系统是否稳定。 matlab程序源代码
num=800;
>> den=conv([1,0],conv([0.25,1],[0.2,1]));
>> bode(num,den);
sys=tf(num,den);
>> rlocus(sys)
4、设计一个校正装置进行串联校正。要求校正后的系统满足指标:
(1)超调量<15%,(2)调整时间<1.5s ,(3)相角稳定裕度>55deg ,(4)幅值稳定裕度>65dB
校无源滞后—超前网络
采用无源滞后超前网络,其传递函数可表示为
2(1s)(1T s)
(s)()1a b c a b a b ab T G T T s T T T s ++=
++++
式中
11
a T R C =
22
b T R C =
12
ab T R C =
上式也可表示为
12(1s)(1T s)(s)(1)(1)a b c T G T s T s ++=
++
比较可得
12a b
T T T T =
12a b ab
T T T T T +=++
设
1a
T T > 211a b T T T T α==
其中
1a >
则有
1a
T T α=
2b
T T α=
于是,无源滞后—超前网络的传递函数最后可表示为
(1s)(1T s)
(s)(1)(1)
a b c b a T G T
T s s αα++=
++ 其中,
(1s)
(1)a a T T s α++为网络滞后部分,
(1T s)(1)
b b T s α
++为网络超前部分。因此,只要确定 a
T 、
b
T 、α
就可以确定其传递函数。
传递函数
0800
(s)(0.25s 1)(0.2s 1)G s =
++
校正前
()A ω=
令
()1A ω=
得
'
25/c rad s ω=
'''18090arctan 0.25arctan 0.270
c c γωω=---=-
令虚部为零有, 穿越频率:
4.5/x rad s ω=
01
0.026(j )
x h dB
G ω=
=
谐振峰值
1sin r M γ
=
, 1 1.8
r M ≤≤
超调量
0.160.4(M 1)r σ=+-
调节时间
0t s c K π
ω=
2
02 1.5(M 1) 2.5(M 1)r r K =+-+-,
1 1.8
r M ≤≤
当
t 1.5s s
=
''55γ= 得
1.22
r M =
'' 5.13/c rad s ω=
交接频率
5/b rad s
ω=
1b b
T ω=
'''''20lg ()20lgT 0
c b c L αωω-++=
'''''()20lg80020lg c c L ωω=--
1a
T T α= 2b
T T α=
则已校正系统的频率特性为
0(1T j )(1T j )180
(j )(j )(0.25j 1)(0.2j 1)
(1T )(1)a b c b a G G T
j j j ωωωωωωωαωωα
++=
++++
根据上式,利用相角裕度指标要求,有
''''''''''''''
18090arctan 0.25arctan 0.2arctan arctan arctan arctan
b
c c a c b c c c T T T T αγωωωωαωωα
=---++--
校正装置的传递函数:
)100125.0(19.1380.1s 10.2s 12.78s 1s G c +++++=
s s )()
)()(()(
Matlab 指令如下:
num=conv(800,conv([2.78,1],conv([0.2,1],[0.1,1]))); den=conv([0.05,0.45,1,0],conv([138.9,1],[0.00125,1])); >> step(num,den) >> s=tf(num,den); >> sys=feedback(s,1); >> step(sys) Bode 图如下:
num=conv(800,conv([2.78,1],conv([0.2,1],[0.1,1]))); den=conv([0.05,0.45,1,0],conv([138.9,1],[0.00125,1])); >> step(num,den)
>> s=tf(num,den);
>> sys=feedback(s,1);
>> step(sys);
>> bode(s)
校正后得:
超调:14.9%
调整时间:0.715
相角裕度:62.9
幅值裕度:无穷大
5、计算校正后系统的剪切频率ωcp和-π穿频率ωcs。
由图可得:
剪切频率:8.83rad/sec 穿越频率:无穷大
6、给出校正装置的传递函数。
)100125.0(1138.90.1s 10.2s 12.78s 1s G c +++++=
s s )()
)()(()(
7、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。 校正前的奈奎斯特图: matlab 指令如下: num=800;
>> den=conv([1,0],conv([0.25,1],[0.2,1])); >> bode(num,den); sys=tf(num,den); >> nyquist(sys)
校正后的奈奎斯特图:
matlab指令如下:
num=conv(800,conv([2.78,1],conv([0.2,1],[0.1,1]))); den=conv([0.05,0.45,1,0],conv([138.9,1],[0.00125,1])); >> bode(num,den);
>> nyquist(num,den);
8. 设计PID 控制器,实现闭环控制,仿真系统的阶跃响应曲线。
PID 控制器一种工业控制方式,主要有四种控制规律:比例控制规律、比例积分控制规律、比例微分控制规律、比例积分微分控制规律。它是根据PID 控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。 PID 控制器又叫比例、微分、积分控制器。P 是比例,它的作用是将误差放大,作为控制量输出;I 是积分,它的作用是不断的将误差加起来,也就是考虑了以前时刻的误差量,把这些误差加起来作为控制量输出;D 是微分,就是考虑连续2个时刻的误差变化,将这个变化作为控制量输出。
按待校正系统不同的开环特性,()s G 0选择P 或PI 或PID 控制器为串联校正装置()
s G c ,使校正后的开环特性()()()
s G s G s G c 0=成为
()()
()32211w s s w s K s G ++=
的形式,然后使
()()
()32211w s s w s K s G ++=
取得最大相角域度,并有尽可能快的响应速度。
选择期望s G 的参数一般取
4
32==
ωωH ,32HT T =,
2381
T K =.较为适中,一般取