
1> 概述
测量学中有测距交会确定点位的方法。与其相似,无线电导航定位系统、卫星激光测距定位系统,其定位原理也是利用测距交会的原理定位。
就无线电导航定位来说,设想在地面上有三个无线电发射台,其坐标为已知,用户接收机在某一时刻采用无线电测距的方法分别测得了接收机至三个发射台的距离d1,d2,d3。只需以三个发射台为球心,以d1,d2,d3为半径作出三个定位球面,即可交会出用户接收机的空间位置。如果只有两个无线电发射台的话,则可根据用户接收机的概略位置交会出接收机的平面位置。这种无线电导航定位系统是迄今为止仍在使用的飞机船舶的的中导航定位方法。
近代卫星大地测量中的卫星激光测距定位也是应用了测距交会定位的原理和方法。虽然用于测距的卫星(表面安装有激光反射镜)是在不停的运动中,但总可以利用固定于地面上三个已知点上的卫星激光测距仪同时测定某一时刻至卫星的距离d1,d2,d3,应用测距交会的原理便可确定该时刻卫星的空间位置。如此,可以确定三可以上卫星的空间位置。如果第四个地面点上(坐标未知)也有一台卫星测距仪同时参与了测定改点到三颗卫星的空间距离,则利用所测定的三个空间距离可交会出该地面点的空间位置。
将无线电信号发射台从地面搬到卫星上,组成一颗卫星导航定位系统,应用无线电测距交会的原理,便可利用三个以上地面已知点(控制站)交会处卫星的位置,反之利用三颗以上的卫星的已知空间位置又可交会出地面未知点(用户接收机)的位置。这便是GPS卫星定位的基本原理。
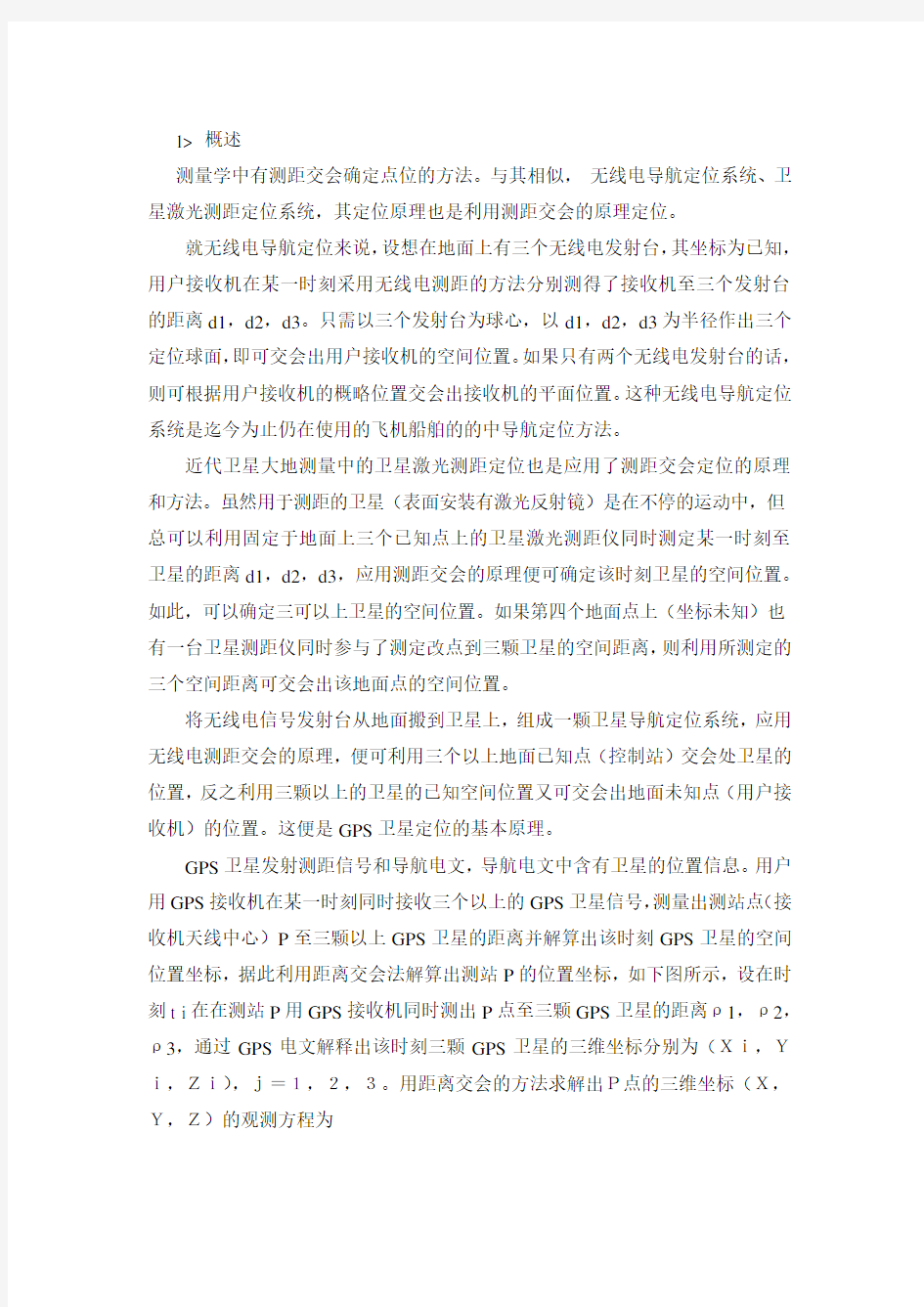
GPS卫星发射测距信号和导航电文,导航电文中含有卫星的位置信息。用户用GPS接收机在某一时刻同时接收三个以上的GPS卫星信号,测量出测站点(接收机天线中心)P至三颗以上GPS卫星的距离并解算出该时刻GPS卫星的空间位置坐标,据此利用距离交会法解算出测站P的位置坐标,如下图所示,设在时刻t i在在测站P用GPS接收机同时测出P点至三颗GPS卫星的距离ρ1,ρ2,ρ3,通过GPS电文解释出该时刻三颗GPS卫星的三维坐标分别为(Xi,Yi,Zi),j=1,2,3。用距离交会的方法求解出P点的三维坐标(X,Y,Z)的观测方程为
121122222232332X X Y Y ()X X Y Y ()X X Y Y ()Z Z Z Z Z Z =-++-=-++-=-++-221
222
223ρ()(-)ρ()(-)ρ()(-)
在GPS定位中,GPS卫星是高速运动的
卫星,其坐标随时间在快速变化着,需要实时地由
GPS卫星信号测量测站至卫星之间的距离,实时
地由卫星的导航电文解算出卫星的坐标值,并标定
测站点的定位,依据测距的原理,其定位原理与方
法主要由伪距法定位,载波相位测量定位以及差分GPS定位等,对于待定点来说,根据其运动状态可以将GPS定位分为静态定位和动态定位。静态定位指的是对于固定不动的待定点,将GPS接收机安置于其上,观测数分钟乃至更长的时间,以确定该点的三维坐标,又叫绝对定位,若以两台GPS接收机分别置于两个不同的固定不动的待定点上,则通过一定时间的观测,可以确定两个待定点之间的相对位置,又叫相对定位。而动态定位则至少有一台GPS接收机处于运动状态,测定的是各观测时刻(观测历元)运动中的接收机的点位(绝对点位或相对定位)
利用接收到的卫星信号(测距码)或载波相位,均可进行静态定位。实际应用中,为了减弱卫星的轨道误差、卫星钟差、接收机钟差以及电离层和对流层的折射误差的影响常采用载波相位观测值的各种线性组合(即差分值)作为观测值,获得两点之间高精度的GPS 基线向量(即坐标差)。
2> 伪距测量
伪距法定位是由GPS 接收机在某一时刻测出得到四颗以上GPS 卫星的伪距以及已知点的卫星位置,采用距离交会的方法求定接收机天线所在点的三维坐标。所测伪距就是由卫星发射的测距码信号到达接收机的传播时间乘以光速所得的量测距离。由于卫星钟、接收机钟的误差以及无线电信号经过电离层和对流层中的延迟,实际测出的距离ρ’与卫星到接收机的几何距离有一定的差距,因此一般称量测出的距离为伪距。用C/A 码进行测量的伪距为C/A 码伪距,用P 码测量出来的伪距为P 码伪距。伪距法定位虽然一次定位精度不高(P 码定位误差
约为10cm,C/A 码定位误差为20~30m),但因其有定位速度快,且无多值性问题等优点,仍然是GPS定位系统进行导航的最基本的方法。同时,所测伪距又可以作为载波相位测量中解决整波数不确定性问题(模糊度)的辅助资料。因此,有必要了解伪距测量以及伪距法定位的基本原理。
2.1 伪距测量
GPS卫星依据自己的时钟发出某一结构的测距码,该测距码经过τ时间的传播后的到达接收机。接收机在自己的时钟控制下产生一组结构完全相同的测距码——复制码,并通过时延器使其延迟时间τ’将这两组测距码进行相关处理,若自相关系数R(τ’)≠1,则继续调整延迟时间τ’直至自相关系数R(τ’)=1为止。使接收机所产生的复制码与接收到的GPS卫星测距码完全对齐,那么其延迟时间τ’即为GPS卫星信号从卫星传播到接收机所用的时间τ。GPS卫星信号的传播时一种无线电信号的传播,其速度等于光速c,卫星至接收机的距离即为τ’与c的乘积。
为什么采用码相关技术来确定伪距呢?
GPS卫星发射出的测距码是按照某一规律排列的,在一个周期内每个码对应某一特定的时间。应该说识别出每一个码的形状特征,即用每个码的某一标志推算出时延值τ进行伪距测量。但实际上每个码在产生过程中都带有随机误差,并且信号经过长距离传播后也会产生在自相关系数R(τ’)=MAX的情况下来确定信号的传播时间τ。这样就排除了随机误差的影响,实质上就是采用了多个码特征来确定τ的方法。由于测距码和复制码在产生的过程中均不可避免地带有误差,而且测距码在传播过程中还会由于各种外界干扰而产生形变,因而自相关系数往往不可避免地带有误差,而其自相关系数不可能达到“1”,只能在自相关系数为最大的情况下来确定伪距,也就是本地码和接收码基本上对齐了。这样可以最大幅度地消除各种随机误差的影响,以达到提高精度的目的。
测定自相关系数R(τ’)的工作由接收机锁相环路中的相关器和积分器来完成。如下图由卫星钟控制的测距码α(t)在GPS时间t时刻自卫星天线发出,经传播延迟τ到达GPS接收机,接收机所接收到的信号为α(t-τ)。由接收机钟控制的本地码发生器产生一个与卫星发播相同的本地码α’(t+Δt),Δt为接收机钟与卫星钟的钟差。经过码移位电路将本地码延迟τ’,送至相关器与所接
收到的卫星发播信号进行相关运算,经过积分器后,即可得到自相关系数R (τ’)输出:
T
1()(dt T R t t t τ'=α-τ)α(+?-τ')?
伪距测量原理图
调整本地码延迟τ’,可使相关输出达到最大值
max ()()R t R t t t t ττ=???'-=+?-??
(1)
可得 t nT c t n ττρρλ?'=+?+?'=+?+? (2)
式中:ρ’为伪距测量值,ρ为卫星到接收机的几何距离,T 为测距码的周期,λ=cT 为相应测距码的波长,n=0,1,2,3……是整数值,c 为信号传播速度。 式(2)中即为伪距测量的基本方程。式中n λ称为测距模糊度。如果已知
待测距离小于测距码的波长(如用P 码测距),则n=0,具有
ρ’=ρ+c Δt (3)
称为无模糊度测距。
由式(3)可知,伪距观测值ρ’的待测距离与钟差等效距离之和。钟差Δt 包含接收机钟差k δt 与卫星钟差j δt ,即j
k t=-δt +δt ?,若考虑到信号传播经电离层和大气对流层的延迟,则(3)式改写为:
j
12k c t c t ρρδρδρδδ'=+++- (4)
(4)式即为所测伪距与真正的几何距离之间的关系式。式中1δρ,2δρ分别
为电离层和对流层的改正项。k δt 的下标表示接收机号,j δt 的上标j 表示卫星
号。
2.2 伪距定位观测方程
从(4)式中可以看出,电离层和对流层改正可以按照一定的模型进行计算,卫星钟差 j
δt 可以自导航电文中取得。而几何距离ρ与卫星坐标(X ,Y ,Z )与接收机坐标(X ,Y ,Z )之间有如下关系: 2222
()()()s s s X X Y Y Z Z ρ=-+-+- (5)
式中,卫星坐标可根据导航电文求得,所以式中只包含接收机坐标三个未知数。 如果将接收机钟差k δt 也作为未知数,则共有四个未知数,接收机必须同时至少测定四颗卫星的距离才能解算出接收机的三维坐标值。为此,将(5)式代入(4)式,有:
1/2222s (X )(Y )()j
j j s s k X Y Z Z c t δ??-+-+--??
12j j j j c t
ρδρδρδ'=++- (6)
式中,j=1,2,3……。
式(6)即为伪距定位的观测方程组。
3> 载波相位测量
利用测距码进行伪距测量是全球定位系统的基本测距方法。然而由于测距码的码元长度较大,对于一些高精度应用来讲其测距精度还显得过低无法满足需要。如果观测精度均取至测距码波长的百分之一,则伪距测量对P 码而言量测精度为30cm ,对C/A 码而言为3m 左右。而如果把载波作为量测信号,由于载波的波长短,1L λ=19cm ,2L λ=24cm ,所以就可以达到很高的精度。目前的大地型
接收机的载波相位测量精度一般为1~2mm ,有的精度更高。但载波信号是一种周期性的正弦信号,而相位相关有只能测定不足一个波长的部分,因而存在着整周期数不确定的问题,使解算过程变得比较复杂。
在GPS 信号中由于已用相位调整的方法在载波上调制了测距码和导航电文,因而接收到的载波的相位一不在连续,所以在进行载波相位测量以前,首先要进行解调工作,设法将调制在载波上的测距码和卫星电文去掉,重新获得载波,这一工作称为重建载波,重建载波一般可以采用两种方法,一种是码相关法,另一种是平方法。采用前者,用户可同时提取测距信号和卫星电文,但用户必须知道测距码的结构;采用后者,用户无须知道测距码的结构,但只能获得载波信号而无法获得测距码和导航电文。
3.1 载波相位测距原理
载波相位测量的观测量是GPS 接收机所接收的卫星载波信号,与接收机本振参考信号的相位差相位差,以j
k ()k t ψ表示k 接收机在接收机钟面时刻k t 时所接收到的j 卫星载波信号的相位值,
k ()k t ψ 表示k 接收机在面钟时刻k t 时所产生的本地参考信号的相位值,则k 接收机在接收机钟面时刻k t 时观测j 卫星所取得的相位观测可写为
k ()()()j j k k k k k t t t ψψψ=- (7)
通常的相位或者相位差测量只是测出一周以内的相位值。实际观测中,如果对整周进行计数,则自某一初始取样时刻0t 以后就可以取得的相位观测值。
如下图,在初始0t 时刻,测得小于一周的相位差为0ψ?,其整周数为0j N ,
此时包含整周数的相位观测值应为:
000()j j k t N ψψ=?+
00()j
j k k t N ψψ=++ (8)
接收机继续跟踪卫星信号,不断测定小于一周的相位差()t ψ?,并利用整波计数器记录从0t 到i t 时间内的整周数变化量()Int ψ,只要卫星j S 从0t 到i t 之间卫星信号没有中断,则初始时刻整周模糊度0j N 就为一常数,这样,任一时刻i t 卫星j S 到k 接收机的相位差为:
()()()()j j j k i k i k i t t t N Int ψψψψ=-++ (9) 上式说明,从第一次开始,在以后的观测中,其观测值包括了相位差的小数部分和累计的整周数。
载波相位观测原理
水准测量的方法及其实施 水准测量原理 水准测量的基本测法是:在图2-1中,已知A点的高程为H A,只要能测出A点至B点的高程之差,简称高差h AB。,则B点的高程 H B就可用下式计算求得: H B=H A+h AB (2-1) 差h AB。的原理如图2-1所示, 在A、B两点上竖立水准尺, 并在A、B两点之间安置— 图2-1 水准测量原理示意图架可以得到水平视线的仪器 即水准仪,设水准仪的水平视线截在尺上的位置分别为M、N,过A 点作一水平线与过B点的竖线相交于C。因为BC的高度就是A、B 两点之间的高差h AB。,所以由矩形MACH就可以得到计算h AB的式: h AB = a - b (2-2) 测量时,a、b的值是用水准仪瞄准水准尺时直接读取的读数值。 因为A点为已知高程的点,通常称为后视点,其读数a为后视读数,
而B点称为前视点,其读数b为前视读数。即 h AB = 后视读数-前视读数 视线高H i=H A+a (2-3)B点高程H B=H i-b (2-4)综上所述要测算地面上两点间的高差或点的高程,所依据的就是一条水平视线,如果视线不水平,上述公式不成立,测算将发生错误。因此,视线必须水平,是水准测量中要牢牢记住的操作要领。 水准仪和水准尺 一、微倾式水准仪的构造 如图2-2所示,微倾式水准仪主要由望远镜、水准器和基座组成。水准仪的望远镜能绕仪器竖轴在水平方向转动,为了能精确地提供水平视线,在仪器构造上安置了一个能使望远镜上下作微小运动的微倾螺旋,所以称微倾式水准仪。 1.望远镜 望远镜由物镜、目镜和十字丝三个主要部分组成,它的主要作用是能使我们看清远处的目标,并提供一条照准读数值用的视线。 十字丝是在玻璃片上刻线后,装在十字丝环上,用三个或四个可
水准测量基本原理(教案)
水准测量基本原理 课型:讲授 教学目的与要求: 了解高程测量常用的方法。 理解水准测量基本原理。 掌握高差法、仪高法及连续水准测量计算未知点高程的方法。教学重点、难点: 重点:水准测量基本原理。 高差法、仪高法及连续水准测量计算未知点高程的方法。 难点:水准测量基本原理。 采用教具: 多媒体课件 复习、提问 1、高程的定义、高差的定义。
第一讲 水准测量基本原理 一、高程测量(测定地面点高程)的方法 高程是确定地面点位置的要素之一,在工程建设的设计、施工与管理等阶段都具有十分重要的作用。测定地面点高程的工作称为高程测量。按所使用的仪器和施测方法分:水准测量、三角高程测量、气压高程测量和GPS 高程测量。 二、水准测量基本原理 水准测量不是直接测定地面点的高程,而是测出两点间的高差。即在两个点上分别竖立水准尺,利用水准测量的仪器提供一条水平视线,瞄准并在水准尺上读数,求得两点间的高差,从而由已知点高程推求未知点高程。 如图1-1所示,设已知A 点高程为A H ,用水准测量方法求未知点B 的高程B H 。在A 、B 两点中间安置水准仪,并在A 、B 两点上分别竖立水准尺,根据水准仪提供的水平视线在A 点水准尺上读数为a ,在B 点的水准尺上读数为b ,则A 、B 两点间的高差为:b a h AB -= 图1-1 水准测量原理
设水准测量是由A 点向B 点进行,如图1-1中箭头所示,则规定 A 点为后视点,其水准尺读数a 为后视读数; B 点为前视点,其水准 尺读数b 为前视读数。由此可见,两点之间的高差一定是“后视读数”减“前视读数”。如果a >b ,则高差AB h 为正,表示B 点比A 点高;如果 a < b ,则高差AB h 为负,表示B 点比A 点低。 在计算高差AB h 时,一定要注意AB h 的下标A B 的写法: AB h 表示A 点至B 点的高差,BA h 则表示B 点至A 点的高差,两个高差应该是绝对值相同而符号相反,即:BA AB h h =- 测得A 、B 两点间高差AB h 后,则未知点B的高程B H 为: )(b a H h H H A AB A B -+=+= (1-1) 水准测量:水平视线(水准仪)+水准尺→待定点与已知点高差+已知点高程→未知点高程。 三、推导以下几种计算未知点高程的公式: 1、高差法(由一点求另一点):直接利用高差计算未知点高程。 b a h AB -=(后视读数-前视读数);AB A B h H H += 2、视线高法(仪高法,由一点求多点):由仪器视线高程H i 计算未知点B 点高程。H A 为A 点的高程,a 为水准尺读数,b 为待求高程点水准尺读数。 ?? ? -=+=b H H a H H i B A i 注意事项: ①区别仅在与计算方法不同;
水准测量基本原理教案 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
水准测量基本原理(教案)
水准测量基本原理 课型:讲授 教学目的与要求: 了解高程测量常用的方法。 理解水准测量基本原理。 掌握高差法、仪高法及连续水准测量计算未知点高程的方法。教学重点、难点: 重点:水准测量基本原理。 高差法、仪高法及连续水准测量计算未知点高程的方法。 难点:水准测量基本原理。 采用教具: 多媒体课件 复习、提问 1、高程的定义、高差的定义。
第一讲 水准测量基本原理 一、高程测量(测定地面点高程)的方法 高程是确定地面点位置的要素之一,在工程建设的设计、施工与管理等阶段都具有十分重要的作用。测定地面点高程的工作称为高程测量。按所使用的仪器和施测方法分:水准测量、三角高程测量、气压高程测量和GPS 高程测量。 二、水准测量基本原理 水准测量不是直接测定地面点的高程,而是测出两点间的高差。即在两个点上分别竖立水准尺,利用水准测量的仪器提供一条水平视线,瞄准并在水准尺上读数,求得两点间的高差,从而由已知点高程推求未知点高程。 如图1-1所示,设已知A 点高程为A H ,用水准测量方法求未知点B 的高程B H 。在A 、B 两点中间安置水准仪,并在A 、B 两点上分别竖立水准尺,根据水准仪提供的水平视线在A 点水准尺上读数为 a ,在B 点的水准尺上读数为 b ,则A 、B 两点间的高差为: b a h AB -=
图1-1 水准测量原理 设水准测量是由A 点向B 点进行,如图1-1中箭头所示,则规定 A 点为后视点,其水准尺读数a 为后视读数; B 点为前视点,其水准 尺读数b 为前视读数。由此可见,两点之间的高差一定是“后视读数”减“前视读数”。如果a >b ,则高差AB h 为正,表示B 点比A 点高;如果 a < b ,则高差AB h 为负,表示B 点比A 点低。 在计算高差AB h 时,一定要注意AB h 的下标A B 的写法:AB h 表示A 点至B 点的高差,BA h 则表示B 点至A 点的高差,两个高差应该是绝对值相同而符号相反,即:BA AB h h =- 测得A 、B 两点间高差AB h 后,则未知点B的高程B H 为: )(b a H h H H A AB A B -+=+= (1-1) 水准测量:水平视线(水准仪)+水准尺→待定点与已知点高差+已知点高程→未知点高程。 三、推导以下几种计算未知点高程的公式: 1、高差法(由一点求另一点):直接利用高差计算未知点高程。 b a h AB -=(后视读数-前视读数);AB A B h H H += 2、视线高法(仪高法,由一点求多点):由仪器视线高程H i 计算未知点B 点高程。H A 为A 点的高程,a 为水准尺读数,b 为待求高程点水准尺读数。
水准测量的基本原理及测量方法 内容:理解水准测量的基本原理;掌握DS3 型微倾式水准仪、自动安平水准仪的构造特点、水准尺和尺垫;掌握水准仪的使用及检校方法;掌握水准测量的外业实施(观测、记录和检核)及内业数据处理(高差闭合差的调整)方法;了解水准测量的注意事项、精密水准仪和电子水准仪的构造及操作方法。 重点:水准测量原理;水准测量的外业实施及内业数据处理。 难点:水准仪的检验与校正。 §2.1 高程测量(Height Measurement )的概念 测量地面上各点高程的工作, 称为高程测量。高程测量根据所使用的仪器和施测方法的不同,分为: (1)水准测量(leveling) (2)三角高程测量(trigonometric leveling) (3)气压高程测量(air pressure leveling) (4)GPS 测量(GPS leveling) §2.2 水准测量原理 一、基本原理 水准测量的原理是利用水准仪提供的“水平视线”,测量两点间高差,从而由已知点高程推算出未知点高程。
a ——后视读数A ——后视点 b ——前视读数B ——前视点 1、A 、 B 两点间高差: 2、测得两点间高差后,若已知A 点高程,则可得B点的高程: 。 3、视线高程: 4、转点TP(turning point) 的概念:当地面上两点的距离较远,或两点的高差太大,放置一次仪器不能测定其高差时,就需增设若干个临时传递高程的立尺点,称为转点。 二、连续水准测量
如图所示,在实际水准测量中,A 、 B 两点间高差较大或相距较远,安置一次水准仪不能测定两点之间的高差。此时有必要沿A 、 B 的水准路线增设若干个必要的临时立尺点,即转点(用作传递高程)。根据水准测量的原理依次连续地在两个立尺中间安置水准仪来测定相邻各点间高差,求和得到A 、 B 两点间的高差值,有: h 1 = a 1 - b 1 h 2 = a 2 - b 2 …… 则:h AB = h 1 + h 2 +…… + h n = Σ h = Σ a -Σ b 结论:A 、 B 两点间的高差等于后视读数之和减去前视读数之和。 § 2.3 水准仪和水准尺 一、水准仪(level) 如图所示,由望远镜、水准器和基座三部分组成。
水准测量的原理
水准测量的原理 一、几种常见的水准测量方法 1.几何水准测量(简称水准测量); 2.三角高程测量; 3.气压高程测量(物理高程测量)。 二、水准测量原理 水准测量是利用水平视线来求得两点的高差。例如图2-1中,为了求出 A 、 B 两点的高差AB h ,在A 、B 两个点上竖立带有分划的标尺——水准尺,在 A 、 B 两点之间安置可提供水平视线的仪器——水准仪。当视线水平时,在A 、B 两个点的标尺上分别读得读数a 和b ,则A 、B 两点的高差等于两个标尺读数之差。即: b a h AB -= (2-1) 如果A 为已知高程的点,B 为待求高程的点,则B 点的高程为: AB A B h H H += (高差法) (2-2) 读数a 是在已知高程点上的水准尺读数,称为“后视读数”;b 是在待求高程点上的水准尺读数,称为“前视读数”。高差必须是后视读数减去前视读数。高差AB h 的值可能是正,也可能是负,正值表示待求点B 高于已知点A ,负值表示待求点B 低于已知点A 。此外,高差的正负号又与测量进行的方向有关,例如图2-2中测量由A 向B 进行,高差用AB h 表示,其值为正;反之由B 向A 进行,则高差用BA h 表示,其值为负。所以说明高差时必须标明高差的正负号,同时要说明测量进行的方向。 图 2-1 由图2-1可以看出,B 点高程还可以通过仪器的视线高程H i 来计算,即 H i =H A +a (2-3) H B =H i -b (仪高法) (2-4) 三、转点、测站 当两点相距较远或高差太大时,则可分段连续进行,从图2-2中可得:
水准测量的原理和使用方法 确定地面点高程的测量工作,称为高程测量。高程测量又是测量三项基本工作之一。根据使用仪器和施测方法的不同,高程测量可分为水准测量、三角高程测量和气压高程测量。用水准仪测量高程,称为水准测量,它是高程测量中最常用、最精密的方法。 水准测量的原理: 水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可由已知点的高程推算出未知点的高程。测定待测点高程的方法有高差法和仪高法两种。 1.高差法 如图2-1所示,若已知A 点的高程A H ,欲测定B 点的高程B H 。在A 、B 两点上竖立两根尺子,并在A 、B 两点之间安置一架可以得到水平视线的仪器。假设水准仪的水平视线在尺子上的位置读数分别为A 尺(后视)读数为a ,B 尺(前视)读数为b ,则A 、B 两点之间的高程差(简称高差AB h )为 b a h AB -= (2-1) 于是B 点的高程B H 为 AB A B h H H += (2-2) b a H h H H A AB A B -+=+= (2-3) 这种利用高差计算待测点高程的方法,称高差法。这种尺子称为水准尺,所用的仪器称为水准仪。 图2-1 水准测量原理
2.仪高法 由式2-3可以写为 b a H H A B -+=)( (2-4) 如图2-2所示,即 b H H i B -= 上式中i H 是仪器水平视线的高程,常称为仪器高程或视线高程。仪高法是,计算一次仪高,就可以测算出几个前视点的高程。即放置一次仪器,可以测出数个前视点的高程。 综上所述,高差法和仪高法都是利用水准仪提供的水平视线测定地面点高程。必须注意 ①前视与后视的概念一定要清楚,不能误解为往前看或往后看所得的水准尺读数。 ②两点间高差AB h 是有正负的,计算高程时,高差应连其符号一并运算。在书写AB h 时,注意h 的下标,AB h 是表示B 点相对于A 点的高差;BA h 则表示是A 点相对于B 点的高差。AB h 与BA h 的绝对值相等,但符号相反。 图2-2 仪高法水准测量
水准测量基础知识培训教案 第一节 水准测量原理及工程测量基础概念、工程测量的重要性 一、水准测量原理 水准测量是利用水准仪提供的水平视线,借助于带有分划的水准尺,直接测定地面上两点间的高差,然后根据已知点高程和测得的高差,推算出未知点高程。 如图2-1所示, A 、B 两点间高差h AB 为 b a h AB -= (2-1) 设水准测量是由A 向B 进行的,则A 点为后视点,A 点尺上的读数a 称为后视读数;B 点为前视点,B 点尺上的读数b 称为前视读数。因此,高差等于后视读数减去前视读数。 铁路线路的纵断面测量设计就是把铁路线路的各点中桩的高程测量出 图2-1 水准测量原理
来,并绘制到一定比例尺的图上进行纵断面的拉坡设计、竖曲线设计、设计高程计算等。 在工程建设的设计、施工和管理各阶段中进行测量工作的理论、方法和技术,称为“工程测量”。工程测量是测绘科学与技术在国民经济和国防建设中的直接应用,是综合性的应用测绘科学与技术。 按工程建设的进行程序,工程测量可分为规划设计阶段的测量,施工兴建阶段的测量和竣工后的运营管理阶段的测量。 规划设计阶段的测量主要是提供地形资料。取得地形资料的方法是,在所建立的控制测量的基础上进行地面测图或航空摄影测量。 施工兴建阶段的测量的主要任务是,按照设计要求在实地准确地标定建筑物各部分的平面位置和高程,作为施工与安装的依据。一般也要求先建立施工控制网,然后根据工程的要求进行各种测量工作。 竣工后的营运管理阶段的测量,包括竣工测量以及为监视工程安全状况的变形观测与维修养护等测量工作。 按工程测量所服务的工程种类,也可分为建筑工程测量、线路测量、桥梁与隧道测量、矿山测量、城市测量和水利工程测量等。此外,还将用于大型设备的高精度定位和变形观测称为高精度工程测量;将摄影测量技术应用于工程建设称为工程摄影测量。 工程测量是直接为工程建设服务的,它的服务和应用范围包括城建、地质、铁路、交通、房地产管理、水利电力、能源、航天和国防等各种工程建设部门。 无论是工程进程各阶段的测量工作,还是不同工程的测量工作,都需要根据误差分析和测量平差理论选择适当的测量手段,并对测量成果进行处理和分析,也就是说,测量数据处理也是工程测量的重要内容。 在当代国民经济建设中,测量技术的应用十分广泛。在很多工程建设中,
§2.1 水准测量的基本原理 教学目的:1、掌握水准测量原理 2、会用高差法计算两点间的高差 3、会用视高法计算前视点的高程,并且知道视高法的使用条件 教学重点:目的之1、2、3 教学难点:目的之1、2 教学方法:讲练结合 课时:2课时 教学过程: 一、组织教学: 二、授新课: 水准仪的作用:提供一条水平视线. 原理:利用水平视线,借助水准尺直接测量各点间高差,然后根据已知高程推算待求高程。 hAB =a-b
两点的高差为后视读数减去前视读数,高差可正可负,hAB为正说明B点比A点高,hAB为负说明B点比A点低。 HB=HA+hAB=HA+(a-b)-----高差法 例1:图中已知A点高程HA=452.623m,后视读数a=1.571m,前视读数b=0.685m,求B点高程。 解:B点对于A点高差: hAB=1.571-0.685=0.886m B点高程为: HB=452.623+0.886=453.509m 例2:已知A点桩顶标高为90.10,后视A点读数a=1.217m,前视B点读数b=2.426m,求B点标高。
解:B点对于A点高差: hAB=a-b=1.217-2.426=-1.209m B点高程为: HB=HA+hAB=90.10+(-1.209)=88.891m B点高程也可以通过仪器视线高程Hi,求得 视线高Hi=HA+a 待定点高程HB=Hi-b 例3:图2.3中已知A点高程HA=423.518m,要测出相邻1、2、3点的高程。先测得A点后视读数a=1.563m,接着在各待定点上立尺,分别测得读数b1=0.953m,b2=1.152,b3=1.328m。 解:先计算出视线高程
§ 2.1 水准测量的基本原理 教学目的: 1、掌握水准测量原理 2、会用高差法计算两点间的高差 3、会用视高法计算前视点 的高程,并且知道视高法的使 用条件 教学重点: 目的之1、2、3 教学难点: 目的之1、2 教学方法: 讲练结合 课时: 2课时 教学过程: 组织教学: 授新课: 水准仪的作用:提供一条水平视线. 原理:利用水平视线,借助水准尺直接测量各点间高差,然后根据已 知高程推算待求高程。
两点的高差为后视读数减去前视读数,高差可正可负, hAB 为正说 明B 点比A 点高,hAB 为负说明B 点比A 点低。 例1图中已知A 点高程HA=452?623m ,后视读数a=1.571m ,前视 读数b=0?685m ,求B 点高程。 解:B 点对于A 点高差: hAB=1?571 - 0?685=0?886m B 点高程为: HB = 452.623+ 0.886= 453.509m 例2:已知A 点桩顶标高为90.10,后视A 点读数 a = 1.217m ,前 视B 点读数b = 2.426m ,求B 点标高。HB = HA + hAB=HA +(a -b ) 高差法 H A 亠a H A 1厂 「 前进方向 大地水准面
hAB = a -b = 1.217— 2.426=- 1.209m 解: B 点对于A 点高差 : ?视线高 Hi =HA + a ?待定点高程 HB = Hi - b it X Jr 、、 、杠 例3:图2.3中已知A 点高程HA=423?518m ,要测出相邻1、2、3 点的高程。先测得A 点后视读数a=1.563m ,接着在各待定点上立尺, 分别测得读数 b1=0?953m , b2=1.152, b3=1?328m 。 解:先计算出视线高程 B 点高程为: ? B 点高程也可以通过仪器视线高程 Hi ,求得