实验十 重力加速度的测量
单摆是由一摆线l 连着重量为mg 的摆锤所组成的力学系统,是力学基础教科书中都要讨论的一个力学模型。当年伽利略在观察比萨教堂中的吊灯摆动时发现,摆长一定的摆,其摆动周期不因摆角而变化,因此可用它来计时,后来惠更斯利用了伽利略的这个观察结果,发明了摆钟。如今进行的单摆实验,是要进一步精确地研究该力学系统所包含的力学线性和非线性运动行为。
一、实验目的
1、学会使用DB-2A 单摆计数(时)仪和米尺,测准摆的周期和摆长。
2、验证摆长与周期的关系,掌握使用DB-2大学单摆仪测量当地重力加速度的方法。
3、初步了解误差的传递和合成。
二、实验原理
1. 利用单摆测量当地的重力加速度值g
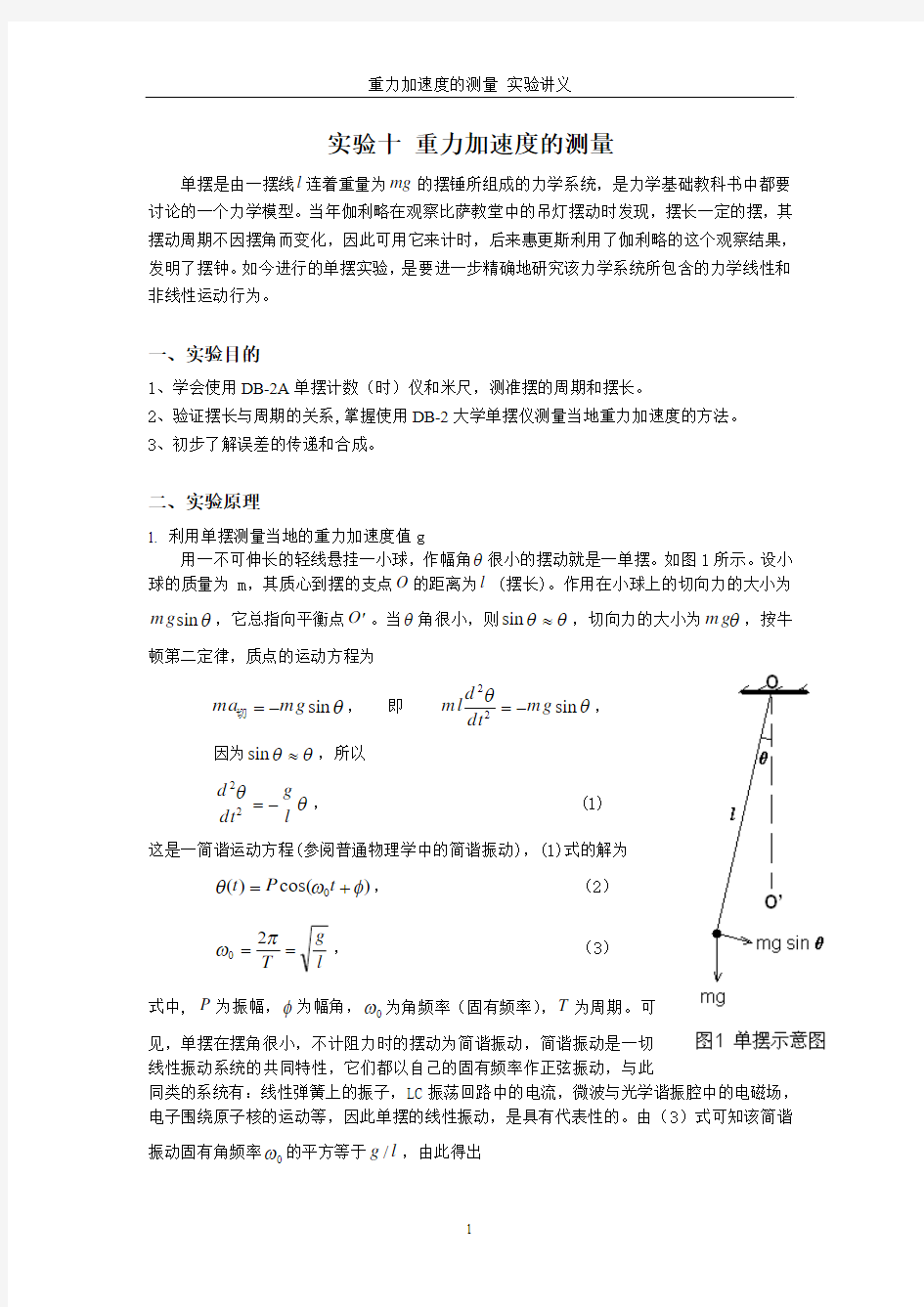
用一不可伸长的轻线悬挂一小球,作幅角θ很小的摆动就是一单摆。如图1所示。设小球的质量为m ,其质心到摆的支点O 的距离为l (摆长)。作用在小球上的切向力的大小为
θsin mg ,它总指向平衡点O '。当θ角很小,则θθ≈sin ,切向力的大小为θm g ,按牛
顿第二定律,质点的运动方程为
θsin mg ma -=切, 即 θθ
sin 22mg dt
d ml -=,
因为θθ≈sin ,所以
θθl g
dt
d -=2
2, (1) 这是一简谐运动方程(参阅普通物理学中的简谐振动),(1)式的解为
)cos()(0φωθ+=t P t , (2) l
g
T
==
πω20, (3) 式中, P 为振幅,φ为幅角,0ω为角频率(固有频率),T 为周期。可
见,单摆在摆角很小,不计阻力时的摆动为简谐振动,简谐振动是一切线性振动系统的共同特性,它们都以自己的固有频率作正弦振动,与此
同类的系统有:线性弹簧上的振子,LC 振荡回路中的电流,微波与光学谐振腔中的电磁场,电子围绕原子核的运动等,因此单摆的线性振动,是具有代表性的。由(3)式可知该简谐振动固有角频率0ω的平方等于l g /,由此得出
g
l T π
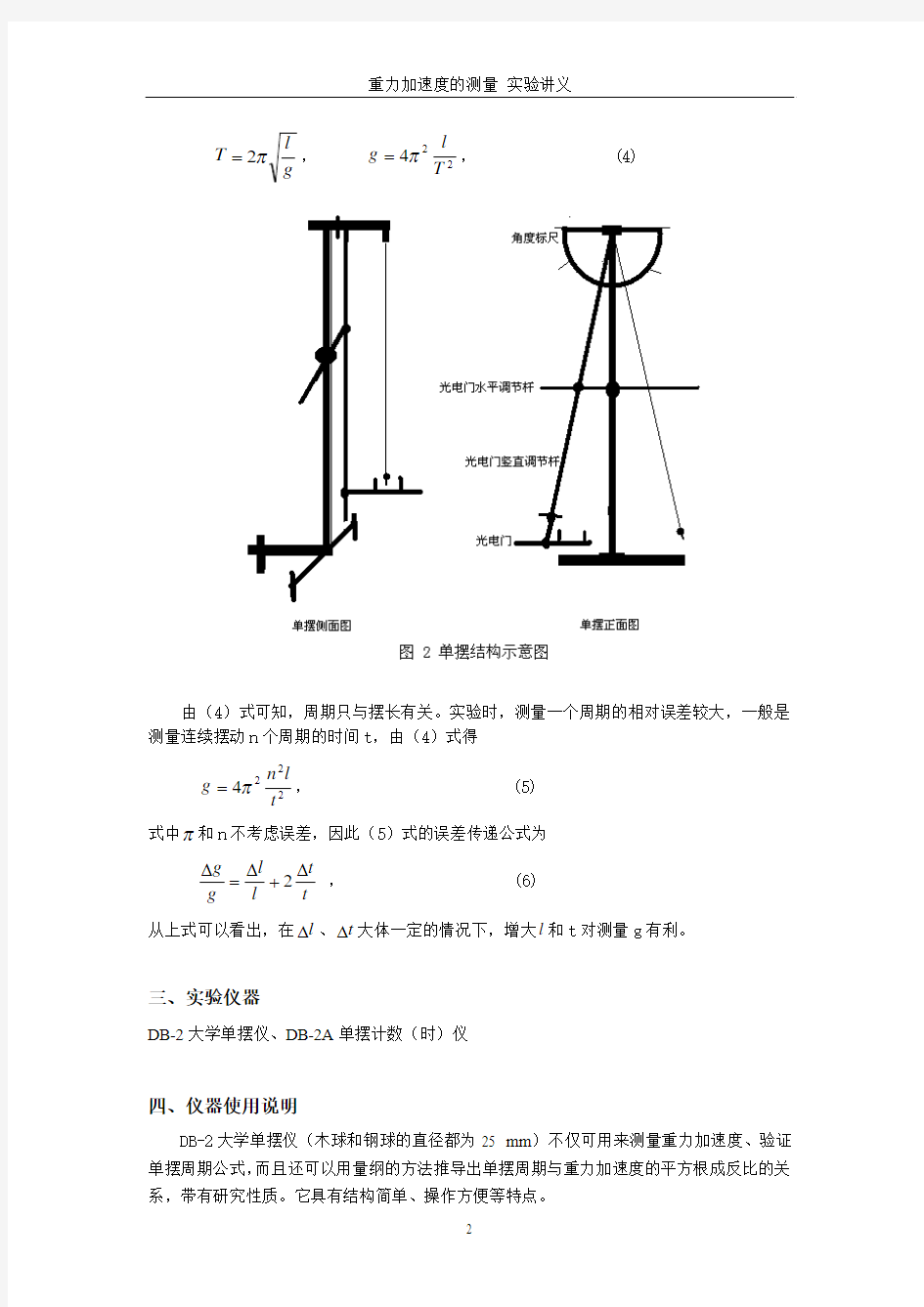
2=, 224T l g π=, (4)
由(4)式可知,周期只与摆长有关。实验时,测量一个周期的相对误差较大,一般是测量连续摆动n 个周期的时间t ,由(4)式得
222
4t
l
n g π=, (5)
式中π和n 不考虑误差,因此(5)式的误差传递公式为
t
t
l l g g ?+?=?2 , (6) 从上式可以看出,在l ?、t ?大体一定的情况下,增大l 和t 对测量g 有利。
三、实验仪器
DB-2大学单摆仪、DB-2A 单摆计数(时)仪
四、仪器使用说明
DB-2大学单摆仪(木球和钢球的直径都为25 mm )不仅可用来测量重力加速度、验证单摆周期公式,而且还可以用量纲的方法推导出单摆周期与重力加速度的平方根成反比的关系,带有研究性质。它具有结构简单、操作方便等特点。
DB-2A 单摆计数(时)仪是一种测量时间间隔的数字仪表。该机由单片机和EPROM 等器件组成,程序固化在EPROM 中,具有记忆、存储功能,最多可依次记录64组脉冲输入时间,并可随意对记录的时间进行查询,还可以对组数,每组光电脉冲数根据需要进行设定。本仪器有操作方便、性能稳定、可靠、计时准确,精度高等特点,是一种理想的计数、计时仪器。
DB-2A 单摆计数(时)仪面板结构图
1. 电源开关:控制仪器电源的通断
2. 输入:信号输入接口
3. 复位:系统复位按钮
4. 左上两位为脉冲组数显示窗
5. 中上为计时显示窗 6 .. 0—9为数字键
7. →为数据递增按键 8. ←为数据递减按键
用DB-2A 单摆计数(时)仪测周期时,小球下端安装有挡光条,另外还配有装光电门的支架。使用时,先调整挡光条与光电门的位置,使挡光条能顺利通过光电门的中间。使用如下:
1.将光电门和计(时)数仪输入口连接起来。
2.接通电源,仪器进入自检状态,板面显示88 888888四次后,进入初始设定状态,显示为P0164,表明每输入1个脉冲,计一次时间,共计64个时间数据。如果想修改,如:4个脉冲计一次时间,共计50组时间,可通过数字键设定为P0450。
3.按“→”键或“←”键,面板显示00 000000,此时仪器处于待计时状态,输入完第1组脉冲后为开始计时的起点,此时面板显示“01 000000”,记完数后自动停止。
4.数据查询:若需要第9次脉冲的时间数,请按0、9两数字键,左边显示器显示“09”,右边显示器显示时间。按“→”键则依次递增各次记录的数据,按“←”键则依次递减。
5.按9键两次,仪器又处于新的待计时状态,并把前次数据消除。 6.按“复位”按钮仪器重新启动(即清除
五、实验内容
1. 分别用米尺和游标卡尺,测量摆线长和摆球的半径.摆长l 等于摆线长加摆球的半径。
2. 当摆球的振幅小于摆长的
12
1时,摆角
5<θ。 3. 用计时器测量周期,参见有关计时器的使用. 4. 重力加速度g 的测量
六、数据处理
改变单摆的摆长l ,测量在
5<θ的情况下,连续摆动n 次的时间t,填入表1中。
表1: 改变摆长l ,在
5<θ的情况下,连续摆动20次时间t 的测量结果
表1的测量数据,有二种处理方法:
(1) 作图法:根据表1的数据,作l --T 2
直线,在直线上取二点A 和B,求直线斜率
2
12
1x x y y K --=
,由(4)式知
K
g 24π=, (7)
根据(7)式求重力加速度g.
(2) 计算法:根据表1的数据,分别计算,不同摆
长的重力加速度g 1, g 2, g 3, g 4, g 5, g 6,然后取平均,再计算不确定度.
七、注意事项
1. 仪器应保持清洁,并需存放于干燥、无腐蚀物质的环境中。
2. 注意光电管的正、负极性不能接反,其电阻小于3K 才能正常工作。
3. 挡片通过光电门的速度不能太慢,以免误计数。
4. 仪器维修应由专业人员进行。
5. 更换保险管时应先断开输入电源,以防触电。保险管为0.2A 。
八、思考题
1、设单摆摆角θ接近
0时的周期为0T ,任意摆角θ时周期T ,二周期间的关系近似为
)2
sin 411(20θ
+=T T ,
若在
10=θ条件下测得T 值,将给g 值引入多大的相对误差?
2、有一摆长很长的单摆,不许直接去测量摆长,你设法用测时间的工具测出摆长?
用凯特摆测量重力加速度 实验目的:学习凯特摆的实验设计思想和技巧,掌握一种比较精确的测量重力加速度的方法。 实验原理:1、当摆幅很小时,刚体绕O轴摆动的周期: 刚体质量m,重心G到转轴O的距离h,绕O轴的转动惯量I,复 摆绕通过重心G的转轴的转动惯量为I G 。 当G轴与O轴平行时,有I=I G+mh2 ∴ ∴复摆的等效摆长l=( I G+mh2 )/mh 2、利用复摆的共轭性:在复摆重心G旁,存在两点O和O′,可使 该摆以O为悬点的摆动周期T?与以O′为悬点的摆动周期T?相同, 可证得|OO′|=l,可精确求得l。 3、对于凯特摆,两刀口间距就是l,可通过调节A、B、C、D四摆 锤得位置使正、倒悬挂时得摆动周期T?≈T?。 ∴4π2/g=(T?2+T?2)/2l + (T?2-T?2)/2(2h?-l) = a + b 实验仪器:凯特摆、光电探头、米尺、数字测试仪。 实验内容:1、仪器调节 选定两刀口间得距离即该摆得等效摆长l,使两刀口相对摆杆基本 对称,并相互平行,用米尺测出l的值,粗略估算T值。 将摆杆悬挂到支架上水平的V形刀承上,调节底座上的螺丝,借 助于铅垂线,使摆杆能在铅垂面内自由摆动,倒挂也如此。 将光电探头放在摆杆下方,让摆针在摆动时经过光电探测器。
让摆杆作小角度摆动,待稳定后,按下reset钮,则测试仪开始自 动记录一个周期的时间。 2、测量摆动周期T?和T? 调整四个摆锤的位置,使T?和T?逐渐靠近,差值小于,测量正、 倒摆动10个周期的时间10T?和10T?各测5次取平均值。 3、计算重力加速度g及其标准误差σg 。 将摆杆从刀承上取下,平放在刀口上,使其平衡,平衡点即重心G。 测出|GO|即h?,代入公式计算g。 推导误差传递公式计算σg 。 实验数据处理:1、l的值 l=?(l?+l?+l?)= σ=,u A =σ/=, ∴ΔA =t P ?u A =*= u B=ΔB /C=3= ∴u L == T e == 2、T?和T?的值 T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s ∴u T1 ==*10ˉ?s T?= σ=*10ˉ?s,u A =σ/=*10ˉ?s ∴ΔA =t P ?u A =*=*10ˉ?s u B=ΔB /C=3=*10ˉ?s
测量系统分析(MSA)方法 测量系统分析(MSA)方法**** 1.目的 对测量系统变差进行分析评估,以确定测量系统是否满足规定的要求,确保测量数据的质量。 2.范围 适用于本公司用以证实产品符合规定要求的所有测量系统分析管理。 3.职责 质管部负责测量系统分析的归口管理; 公司计量室负责每年对公司在用测量系统进行一次全面的分析; 各分公司(分厂)质检科负责新产品开发时测量系统分析的具体实施。 4.术语解释 测量系统(Measurement system):用来对被测特性赋值的操作、程序、量具、设备以及操作人员的集合,用来获得测量结果的整个过程。 偏倚(Bias):指测量结果的观测平均值与基准值的差值。 稳定性(Stability):指测量系统在某持续时间内测量同一基准或零件的单一特性时获得的测量平均值总变差,即偏倚随时间的增量。 重复性:重复性(Repeatability)是指由同一位检验员,采用同一量具,多次测量同一产品的同一质量特性时获得的测量值的变差。 再现性: 再现性(Reproductivity) 是指由不同检验员用同一量具,多次测量同一产品的同一质量特性时获得的测量平均值的变差。 分辨率(Resolution):测量系统检出并如实指示被测特性中极小变化的能力。 可视分辨率(Apparent Resolution):测量仪器的最小增量的大小,如卡尺的可视分辨率为。有效分辨率(Effective Resolution):考虑整个测量系统变差时的数据等级大小。用测量系统变差的置信区间长度将制造过程变差(6δ)(或公差)划分的等级数量来表示。关于有效分辨率,在99%置信水平时其标准估计值为GR&R。 分辨力(Discrimination):对于单个读数系统,它是可视和有效分辨率中较差的。
大学物理重力加速度的测定实验报告范 文 一、实验任务 精确测定银川地区的重力加速度 二、实验要求 测量结果的相对不确定度不超过5% 三、物理模型的建立及比较 初步确定有以下六种模型方案: 方法一、用打点计时器测量 所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 利用自由落体原理使重物做自由落体运动.选择理想纸带,找出起始点0,数出时间为t的p点,用米尺测出op的距离为h,其中t=0.02秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、取半径为r的玻璃杯,内装适当的液体,固定在旋转台上.旋转台绕其对称轴以角速度ω匀速旋转,这时液体相对于玻璃
杯的形状为旋转抛物面 重力加速度的计算公式推导如下: 取液面上任一液元a,它距转轴为x,质量为m,受重力mg、弹力n.由动力学知: ncosα-mg=0 (1) nsinα=mω2x (2) 两式相比得tgα=ω2x/g,又tgα=dy/dx,∴dy=ω2xdx/g, ∴y/x=ω2x/2g. ∴ g=ω2x2/2y. .将某点对于对称轴和垂直于对称轴最低点的直角坐标系的坐标x、y测出,将转台转速ω代入即可求得g. 方法四、光电控制计时法 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n 取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法五、用圆锥摆测量 所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆锥n转所用的时间t,则摆锥角速度ω=2πn/t 摆锥作匀速圆周运动的向心力f=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得: g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值.
量测系统分析M S A Document number【SA80SAB-SAA9SYT-SAATC-SA6UT-SA18】
量测系统分析(MSA) 目录 第1章量测系统介绍 1.1 概述、目的、术语 1 1.2 量测系统之统计特性 2 1.3 量测系统的标准 3 1.4 量测系统的通则 3 1.5 选择/制定检定方法 3 第2章量测系统之评价 2.1概述 5 鉴别力 5 量测系统变异的类型 7 量测系统分析 8 再现性 8 再生性 9
零性间变异 10 偏性 10 稳定性 11 线性 13 范例说明 15 量测系统研究之准备 20 计量值量测系统之研究 21 稳定性之准则 21 偏性之准则 21 独立取样法 21 图表法 22 分析 23 再现性与再生性之准则23 全距法 23
平均值与全距法 23 .1执行研究 24 .2图表分析 26 .3计算及研究 34 变异数分析法 38 量具绩效曲线 43 计数值量具研究 47 短期法 47 长期法 48 第3章附录 标准常态分配表 52 常数表 54 如何适当的选用量测系统分析流程 55 表格 56
量测系统分析版 (Measurement System Analysis) 第1章量测系统介绍 1.1概述、目的、术语 概述 我们知道,一个制程的状况必须经由量测来获取相关信息,因此量测数据将会决定制程是否应被调整,如果统计结果,制程超出管制界限,即制程能力不足时,则须对制程作某些调整,否则,制程将会在无调节的状态下运作。 量测数据的另一用途是可以检视二个或更多变异彼此之间是否存在某种关系 性,如塑料件的尺寸将与进料温度有关。 因此,量测数据的品质对于制程分析结果占有相当重要的因素,为了确保分析结果不致对制程误判,就必须重视数据的品质。 量测数据品质与制程是否在稳定状况下所获得的多种量测有关,若在稳定状况下所获得某一特性的量测数据,其结果”近似于”该特性的标准值,则数据品质可谓”高”;若某些或全部数据偏离标准值甚远,则数据品质可谓” 低”。常用于表示数据品质高低的统计特性有偏差与方差,所谓偏差是指量测数据平均值与标准值之差异;所谓方差则是指量测数据本身之间差异。如果数据品质是不可接受,则必须加以改进,然而这常常应改进量测系统本身,而非改进数据。 因此,对于量测系统品质的评估,是极其重要的,其评价程序应包括 设计及验证
重力加速度测量(设计性实验) 【实验目的】 (1)推导单摆测量重力加速度的公式。 (2)掌握单摆测量重力加速度实验的实验设计方法及验证方法。 (3)掌握间接测量量不确定度的计算方法。 (4)了解单摆测量重力加速度实验的主要误差来源。 (5)估算实验仪器的选取参数并设计实验数据记录表格。 【设计实验】 设计性实验的设计过程主要有以下几步: (1)根据待测的物理量确定出实验方法(理论依据),推导出测量的数学公式;判定方法误差给测量结果带来的影响。 (2)根据实验方法及误差设计要求,分析误差来源,确定所需要采用的测量仪器(包括量程、精度等)以及测量环境应达到的要求(如空气、电磁、振动、温度、海拔高度等)。 (3)确定实验步骤、需要测量的物理量、测量的重复次数等。 (4)设计实验数据表格及要计算的物理量。 (5)实验验证。要用测得的实验数据,采用误差理论来验证实验结果。若不符合测量要求,则需对上述步骤中的有关参数做出适当调整并重做实验,据测得的实验数据进行实验验证,以此类推直到符合要求为止。 设计实验的原则应在满足设计要求的前提下,尽可能选用简单、精度低的仪器,并能降低对测量环境的要求,尽量减少实验测量次数。 【设计要求】 (1)测定本地区的重力加速度,要求重力加速度的相对不确度小于0.5%,即 g 0.5u g ≤%。确 定所需仪器的量程和精度,以及测量参数(摆长和摆动次数)。 (2)本实验是测量重力加速度的设计性实验,但考虑到设计难度、仪器资源的限制等因素,规定其实验方法采用单摆法。 (3)可用仪器有:钢卷尺(1 mm/2 m ,表示最小分度值为1 mm ,量程为2 m ,下同)、钢直尺(1 mm/1 m )、游标卡尺(0.02 mm/20 cm )、普通直尺(1 mm/20 cm )、电子秒表(0.01 s )、单摆实验仪(含摆线、摆球等)。 【实验内容】 (1)原理分析。写出单摆法测量公式完整的推导过程及近似要求,并画出原理图(查阅相关书籍及网站)。 (2)误差分析。分析实验过程中的主要误差来源并估算。 (3)不确定度的推导与计算。 (4)估算实验参数(摆长和摆动次数)。 (5)设计实验步骤与数据表格。 (6)实验与验证。 【设计提示】
Acceleration due to gravity 1. Aim: To measure ‘g’, the acceleration due to gravity using a simple pendulum. 2. Theory: A simple pendulum consists of a particle of mass m, attached to a frictionless pivot P by a cable of length L and negligible mass. When the particle is pulled away from its equilibrium position by an angle θand released, it swings back and forth as Figure 1 shows. By attaching a pen to the bottom of the swinging particle and moving a strip of paper beneath it at a steady rate, we can record the position of the particle as time passes. The graphical record reveals a pattern that is similar (but not identical) to the sinusoidal pattern for simple harmonic motion. Figure 1 A simple pendulum swinging back and forth about the pivot P. If the angle θis small, the swinging is approximately simple harmonic motion. Gravity causes the back-and-forth rotation about the axis at P. The rotation speeds up as the particle approaches the lowest point and slows down on the upward part of the swing. Eventually the angular speed is reduced to zero, and the particle swings back. If the angle of oscillation is large, the pendulum does not exhibit simple harmonic motion. The motion of a simple pendulum is nearly simple harmonic. The periodic time T is related to the length L of the pendulum and the local acceleration due to gravity g. 2 T=or 2 2 4 T L g π ?? = ? ?? If we measure the periodic time T for different lengths L, and plot T2 versus L,
重力加速度的测定 一,实验目的 1,学习秒表、米尺的正确使用 2,理解单摆法和落球法测量重力加速度的原理。 3,研究单摆振动的周期与摆长、摆角的关系。 4,学习系统误差的修正及在实验中减小不确定度的方法。 二,实验器材 单摆装置,停表(精度为0.01s),钢卷尺(精度为1mm),游标卡尺(精度为0.02mm) 三,实验原理 单摆是由一根不能伸长的轻质细线和悬在此线下端体积很小的重球所构成。在摆长远大于球的直径,摆球质量远大于线的质量的条件下,将悬挂的小球自平衡位置拉至一边(很小距离,摆角小于5°),然后释放,摆球即在平衡位置左右作周期性的往返摆动,如图2-1所示。 f =F sinθf θ T=F cosθ F= mg L 单摆原理图
摆球所受的力f 是重力和绳子张力的合力,f 指向平衡位置。当摆角很小时(θ<5°),圆弧可近似地看成直线,f 也可近似地看作沿着这一直线。设摆长为L ,小球位移为x ,质量为m ,则 L x = θsin f=θsin F =-L x mg - =-m L g x 由f=ma ,可知a=- L g x 式中负号表示f 与位移x 方向相反。 单摆在摆角很小时的运动,可近似为简谐振动,比较谐振动公式:a = m f =-ω2 x 可得ω=l g ,即02 22=+x dt x d ω,解得)cos(0?ω+=t A x ,0A 为振幅,?为初相。 应有[])2cos())((cos )cos(000?πω?ω?ω++=++=+=t A T t A t A x 于是得单摆运动周期为:T =ωπ 2=2πg L 即 T 2=g 2 4πL 或 g=4π22 T L 又由于细线不是完全没有质量,他在外力作用下也不可能完成伸长,所以,单摆的重力加速度公式修正为 22 21 4T d L g +=π 四,实验步骤 1,数据采集 (1)测量摆长L 用米尺测量摆球支点和摆球顶点或最低点的间距l ,用游标卡尺测量小球的直径d,则摆长 d l L 2 1+= (2)测量摆动周期 用手把摆球拉至偏离平衡位置约? 5放开,让其在一个铅直面内自由摆动,当小球通过平衡位置的瞬间,开始计时,连续默数100次全振动时间为t ,再除以100,得到周期T 。 (3)将所测数据列于下表中,并计算出摆长、周期及重力加速度。
气垫导轨测重力加速度 【试验目的】: 1.研究测重力加速度的方法; 2.测量本地区的重力加速度。 【实验原理】: 当气轨水平放置时,自由漂浮的滑块所受的合外力为零,因此,滑块在气轨上可以静止,或以一定的速度作匀速直线运动。在滑块上装一与滑块运动方向严格平行、宽度为的挡光板,当滑块经过设在某位置上的光电门时,挡光板将遮住照在光敏管上的光束,因为挡光板宽度一定,遮光时间的长短与滑块通过光电门的速度成反比,测出挡光板的宽度L和遮光时间t,则滑块通过光电门的平均速度为: V=L/t (1-1) 若挡板很小,则在挡光范围内滑块的速度变化也很小,故可以把平均速度看成是滑块经过光电门的瞬时速度。挡板越小,则平均速度越准确地反映该位置上滑块的瞬时速度,显然,如果滑块作匀速直线运动,则滑块通过设在气轨任何位置的光电门时瞬时速度都相等,毫秒计上显示的时间相同,在此情形下,滑块速度的测量值与挡板的大小无关。 若滑块在水平方向受一恒力作用,滑块将作匀加速直线运动,分别测出滑块通过相距S的2个光电门的始末速度和V1和V2则滑块的加速度: 2as=v12–v22 (1-2) 将式(1-1)代入(1-2)中 得: 2as=L2(1/t22-1/t12) (1-3) 其原理如图1. 气垫导轨与水平面的夹角为α 则 a=g*ginα. (1-4) 【待测物理量】: V〈物体运动速度〉、a〈物体运动加速度〉、g〈本地区的加速度〉、α〈气垫导轨与水平面的夹角〉、Δt〈物体在两光电门之间的运动时间〉. 【实验仪器及其使用介绍】: 气垫导轨、数字毫秒计、滑块、游标卡尺、垫块。 一、气垫导轨 气垫导轨是一种现代化的力学实验仪器。实物如下图所示:
测量系统分析(MSA) 1目得与范围 规范测量系统分析,明确实施方法、步骤及对数据得处理、分析。 2规范性引用文件 无 3定义 3.1测量系统:用来对测量单元进行量化或对被测得特性进行评估,其所使用得仪器或量具、标准、操作、方法、夹具、软件、人员、环境及假设得集合;也就就是说,用来获得测量结果得整个过程。 3.2稳定性:就是测量系统在某持续时间内测量同一基准或零件得单一特性时获得得测量值总变差。 稳定性就是整个时间得偏倚得变化。 3.3分辨率:为测量仪器能够读取得最小测量单位。别名:最小读数单位、刻度限度、或探测度、分辨力;要求低于过程变差或允许偏差(tolerance)得十分之一。Minitab中常用得分辨率指标:可区分得类别数ndc=(零件得标准偏差/ 总得量具偏差)* 1、41,一般要求它大于等于5才可接受,10以上更理想。 3.4过程总波动TV=6σ。σ——过程总得标准差 3.5准确性(准确度):测量得平均值就是否偏离了真值,一般通过量具计量鉴定或校准来保证。 3.5.1真值:理论正确值,又称为:参考值。 3.5.2偏倚:就是指对相同零件上同一特性得观测平均值与真值得差异。%偏倚=偏倚得平均绝对值/TV。 3.5.3线性:在测量设备预期得工作量程内,偏倚值得差值。用线性度、线性百分率表示。 3.6精确性(精密度):测量数据得波动。测量系统分析得重点,包括:重复性与再现性 3.6.1重复性:就是由一个评价人,采用一种测量仪器,多次测量同一零件得同一特性时获得得测量值变差。重复性又被称为设备波动(equipment variation,EV)。 3.6.2再现性:就是由不同得评价人,采用相同得测量仪器,测量同一零件得同一特性时测量平均值得变差。再现性又被称为“评价人之间”得波动(appraiser waration,AV)。 3.6.3精确性%公差(SV/Toler),又称为%P/T:就是测量系统得重复性与再现性波动与被测对象质量 σ/ (USL-LSL) *100%。 特性公差之比,%P/T=R&R/(USL-LSL)*100%=6 MS σ/6σ*100%。 3.6.4精确性%研究变异(%Gage R&R、%SV)= R&R/TV*100%=6 MS 线性
实验3 重力加速度的测量(单摆法) 单摆实验有着悠久历史,当年伽利略在观察比萨教堂中的吊灯摆动时发现,摆长一定的摆,其摆动周期不因摆角而变化,因此可用它来计时,后来惠更斯利用了伽利略的这个观察结果,发明了摆钟。 本实验是用经典的单摆公式测量重力加速度g ,对影响测量精度的因素进行分析,学习如何改进测量方法,以进一步提高测量精度。 【目的要求】 1、用单摆测定动力加速度; 2、学习使用计时仪器(停表、光电计时器); 3、学习在直角坐标纸上正确作图及处理数据; 4、学习用最小二乘法作直线拟合。 【仪器用具】 单摆装置,带卡口的米尺,游标卡尺,电子停表,光电计时器。 【实验原理】 把一个金属小球拴在一根细长的线上,如图1所示。如果细线的质量比小球的质量小很多,而球的直径又比细线的长度小很多,则此装置可看做是一根不计质量的细线系住一个质点,这就是单摆。略去空气的阻力和浮力以及线的伸长不计,在摆角很小时,可以认为单摆 作简谐振动,其振动周期T 为 g l T π 2= ,224T l g π= (1) 式中l 是单摆的摆长,就是从悬点O 到小球 球心的距离,g 是重力加速度。因而,单摆周期 T 只与摆长l 和重力加速度g 有关。如果我们测量 出单摆的l 和T ,就可以计算出重力加速度g 。 【实验内容】 1、固定摆长,测定g 。 (1)测定摆长(摆长l 取100cm 左右)。 图1 ①先用带刀口的米尺测量悬点O 到小球最低点A 的距离1l (见图1),如下所列: 再估计1l 的极限不确定l e 1,计算出标准不确定度31 1l l e =σ。 ②先用游标卡尺多次测量小球沿摆长方向的直径d (见图4-1),如下所列:
一、实验目的 1.学会秒表、米尺的正确使用。 2.理解单摆法测定重力加速的原理。 3.研究单摆振动的周期与摆长、摆角的关系。 4.学习系统误差的修正及在实验中减小不确定度的方法。 二、实验仪器 单摆装置,停表(精度为0.01s ),钢卷尺(精度为0.05cm ),游标卡尺(精度为0.02mm )。 三、实验原理 单摆的振动周期决定于重力加速度g 和摆长L ,只需要量出摆长L 并测定摆动周期,就能够得到g 。 如图:当θ<5?时,圆弧可近似的看成直线,f 也可 近似的看成沿着这条直线,则有sin θ=x L ,f=Fsin θ= -mg x L =-m g L x 由牛顿第二定律得:a=f m 则有 a=-g L x 令ω=g L x 最终得单摆的运动方程为 X=A cos(ωt +2π+φ) 其中T=2π ω =2π√ g =4π2 L T 考虑到摆 球是有大小的,故g =4π2 L+ d 2T 摆长L 用米尺测量,摆球直径d 用游 标卡尺测量,周期T 用停表测量。 四、实验步骤 1.测量摆长L 。用米尺测量摆线支点与摆球顶点的距离l 。用游标卡尺测量小球的直径d ,则摆长L=l+d 2 。 2.测量摆动周期T 。用手把摆球拉直偏离平衡位置5度左右,让其在
一个垂直面内自由摆动,小球越过平衡位置瞬间开始计时,连续默数 。 100次全振动时间t,T=t 100 3.为了减小误差,重复测量5次将数据记录于下表中。 五、数据记录与处理
六、结果与讨论 兰州的重力加速度g=9.973±0.005m/s2,结果有偏差,原因有以下几点; 1、测量单摆周期时的反应时间。 2、在测量摆线长度时对最后一位数字的估读。 3、环境方面,温度、湿度、空气阻力的变化都会影响实验结果。 4、悬线质量的影响。 5、摆角角度的影响。 七、试验问题 1、直接测量单摆往返一次的时间会受到人的反应时间的影响,通过多次测量求平均值的方法可以减小误差。 2、1 11.4 3、受空气阻力影响摆幅越来越小,但其周期不变;用木球代替铜球时,因木球密度较小,受空气阻力的影响会变大。
重力加速度测量的十种方法 方法一、用弹簧秤和已知质量的钩码测量 将已知质量为m的钩码挂在弹簧秤下,平衡后,读数为G.利用公式 G=mg得g=G/m. 方法二、用滴水法测重力加速度 调节水龙头阀门,使水滴按相等时间滴下,用秒表测出n个(n取50—100)水滴所用时间t,则每两水滴相隔时间为t′=t/n,用米尺测出水滴下落距离h,由公式h=gt′2/2可得g=2hn2/t2. 方法三、用单摆测量(见高中物理学生实验) 方法四、用圆锥摆测量.所用仪器为:米尺、秒表、单摆. 使单摆的摆锤在水平面内作匀速圆周运动,用直尺测量出h(见图1),用秒表测出摆球n转所用的时间t,则摆球角速度ω=2πn/t 摆球作匀速圆周运动的向心力F=mgtgθ,而tgθ=r/h所以mgtgθ=mω2r由以上几式得:
g=4π2n2h/t2. 将所测的n、t、h代入即可求得g值. 方法五、用斜槽测量,所用仪器为:斜槽、米尺、秒表、小钢球. 按图2所示装置好仪器,使小钢球从距斜槽底H处滚下,钢球从水平槽底末端以速度v作平抛运动,落在水平槽末端距其垂足为H′的水平地面上,垂足与落地点的水平距离为S,用秒表测出经H′所用的时间t,用米尺测出S,则钢球作平抛运动的初速度v=S/t.不考虑摩擦,则小球在斜槽上运动时,由机械能守恒定律得:mgH=mv2/2.所以g=v2/2H=S2/2Ht2,将所测代入即可求得g值. 方法六、用打点计时器测量.所用仪器为:打点计时器、直尺、带钱夹的铁架台、纸带、夹子、重物、学生电源等. 将仪器按图3装置好,使重锤作自由落体运动.选择理想纸带,找出起始点0,数出时间为t的P点,用米尺测出OP的距离为h,其中t=0.02 秒×两点间隔数.由公式h=gt2/2得g=2h/t2,将所测代入即可求得g.
——利用单摆测重力加速度 班级: 姓名: 学号: 西安交通大学模拟仿真实验实验报告 实验日期:2014年6月1日 老师签字:_____ 同组者:无 审批日期:_____ 实验名称:利用单摆测量重力加速度仿真实验 一、实验简介 单摆实验是个经典实验,许多著名的物理学家都对单摆实验进行过细致的研究。本实验的目的是学习进行简单设计性实验的基本方法,根据已知条件和测量精度的要求,学会应用误差均分原则选用适当的仪器和测量方法,学习累积放大法的原理和应用,分析基本误差的来源及进行修正的方法。 二、实验原理 用一根绝对挠性且长度不变、质量可忽略不计的线悬挂一个质点,在重力作用下在铅垂平面内作周期运动,就成为单摆。单摆在摆角小于5°(现在一般认为是小于10°)的条件下振动时,可近似认为是简谐运动。而在实际情况下,一根不可伸长的细线,下端悬挂一个小球。当细线质量比小球的质量小很多,而且小球的直径又比细线的长度小很多时,此种装置近似为单摆。单摆带动是满足下列公式: 进而可以推出: 式中L 为单摆长度(单摆长度是指上端悬挂点到球重心之间的距离);g 为重力加速度。如果测量得出周期T 、单摆长度L ,利用上面式子可计算出当地的重力加速度g 。 西安交通大学物理仿真实验报告
三、实验内容 1. 用误差均分原理设计单摆装置,测量重力加速度g. 设计要求: (1)根据误差均分原理,自行设计试验方案,合理选择测量仪器和方法. (2)写出详细的推导过程,试验步骤. (3)用自制的单摆装置测量重力加速度g,测量精度要求△g/g < 1%. 可提供的器材及参数: 游标卡尺,米尺,千分尺,电子秒表,支架,细线(尼龙线),钢球,摆幅测量标尺(提供硬白纸板自制),天平(公用). 假设摆长l≈70.00cm;摆球直径D≈2.00cm;摆动周期T≈1.700s; 米尺精度△ 米≈0.05cm;卡尺精度△ 卡 ≈0.002cm;千分尺精度△ 千 ≈0.001cm; 秒表精度△ 秒 ≈0.01s;根据统计分析,实验人员开或停秒表反应时间为0.1s 左右,所以实验人员开,停秒表总的反应时间近似为△ 人 ≈0.2s. 2. 对重力加速度g的测量结果进行误差分析和数据处理,检验实验结果是否 达到设计要求. 3. 研究单摆周期与摆长,摆角,悬线的质量和弹性系数,空气阻力等因素的关 系,试分析各项误差的大小. 四、实验仪器 单摆仪,摆幅测量标尺,钢球,游标卡尺(图1-图4)
实验一自由落体重力加速度的测定 一、实验目的 1. 通过测定重力加速度,加深对匀加速运动规律的理解: 2. 学习用光电法计时; 3. 学习用落体法测定重力加速度. 二、仪器组成 YJ-LG-3自由落体重力加速度测定仪、YJ-LG-3自由落体重力加速度测定仪专用毫秒计、钢球、卷尺等 三、仪器结构 1. YJ-LG-3自由落体重力加速度测定仪专用毫秒 计面板如图l所示 2. 自由落体测定仪如图2所示 四、实验原理 在重力作用下,物体的下落运动是匀加速直线运 动.可用下列方程来描述: 式中s是在时间t内物体下落的距离.g是重力加速度.如果物体下落的初速度为0,即Vo=0时, 可见若能测得物体在最初t秒内通过的距离S,就可以 估算出g的值,在实验中要严格保证初速度为零有一定 的困难.,故常采用下列方法:实验时,让物体从静止开 始自由下落.如图3所示,设它到达A点的速度为V0. 从A点开始,经过时间t1到达B点,令A、B两点的距 离为S1., 则 若保持上述的初始条件不变,则从A点起,经过时
间t2后.物体到达C点.令A、C两点的距离为S2.则 由式3和式4得: 以上两式相减,得: 那么就有 这里不再出现初速度值,式中的各值均可用自由落体测定仪测量得到. 五、实验步骤 1.调节自由落体仪垂直.将重锤装置安装好,调整底座上的调节螺旋,使重锤悬线与落体仪两立柱平行. 2.将第一光电门放在立柱A处.如离顶端20cm处,调第二光电门于B处.如两光电门相距90cm处,将实验装置上的激光器、接收器与YJ-LG-3自由落体重力加速度测定仪专用毫秒计连接,打开电源,可看见激光器发出红光. 3.调节上、下两个激光器。使激光束平行地对准重锤线后,取下重锤装置. 4.保持上、下两个激光器位置不变,调节上、下两个接收器分别与对应的激光器对准(使激光束垂直射入接收器入射孔),直至用手指通过上、下两光电门时,专用毫秒计能正常计时. 5.按动YJ-LG-3自由落体重力加速度测定仪专用毫秒计功能键(使用方法见附录),选择计时精度为0.0001s,(测完一组数据后,按动复位键归零). 6.用手指托住钢球至落球定位孔,迅速松开手指,记录钢球自由下落通过上、下两光电门的时间t1。 7.用卷尺置于两光电门之间,测出两激光束之间的距离S1。 8. 重复以上步骤,测量八组数据,求平均值. 9.重复以上步骤,改变两光电门距离,用卷尺置于两光电门之间,测出两激光束之间的距离S2,测量八组t2数据,求平均值. 10.将实验数据填入下表.并按式(8)计算重力加速度g.求其误差.
用三种方法测量重力加速度 朱津纬1 (1.复旦大学物理学系,上海市200433) 摘要:本实验通过手机phyphox软件,用三种方法测量了重力加速度。分别将落币法、复摆法和弹簧法所得的重力加速度结果与实际值比较,误差不超过4%。 1 引言 随着科技的发展,如今智能手机功能越来越丰富。许多应用软件全面地利用手机中传感器,可以用来实施物理实验[1,2]。其中,“phyphox”是集合了很多实验项目的应用软件。本实验将利用它来测量重力加速度。 重力加速度可通过多种方法进行测得。如单摆法[3],多管落球法[4],和利用自由落体的方法[5]等。在本实验中,重力加速度利用落币法、复摆法和弹簧法三种方法被测量,并与标准值比较。 2 实验原理 首先,分别介绍三种方法的理论原理。 2.1 落币法 该实验将利用“phyphox”中的“声控秒表”项目,测量硬币从不同高度?自由落体所 需的时间t。通过对t?√?数据线性拟合,得到重力加速度g=2 斜率2 。 如图1所示,硬币自由落体下落的高度为?。用水笔敲击直尺发出敲击声,设该时刻为t0。经过微小时间差Δt(与高度无关,假设为常量),硬币开始下落,设该时刻为t1。一段时间后,硬币落到地上,并发出与地面的碰撞声,设该时刻为t2。“声控秒表”测量了两次声响的时间差t=t2?t0。 由自由落体公式可知 ?=1 2g(t2?t1)2=1 2 g(t?Δt)2,(2.1) 即 t=√2 g √?+Δt。(2.2) 因此t?√?呈线性关系,斜率为√2 g 。 2.2 复摆法 图1 落币法实验示意图
该实验将利用“phyphox ”中的“单摆”项目,测量不同摆长L 复摆的摆动周期T 。通过 对T 2? L 2+bL+ b 23 (L+b 2) 数据线性拟合,得到重力加速度g = 4π 2 斜率 。 如图2所示,长度为L 的细线与宽度为b 的手机组成复摆,以杆子为轴前后摆动。设复摆的转动惯量为I ,手机(过中心水平轴)的转动惯量为I c = mb 212 。则由平行轴定理得 I =I c +m(L +b 2)2。 (2.3) 由复摆摆动周期公式得 T =2π√ I mg(L+b 2 ) =2π√ L 2+bL+ b 23 g(L+b 2 ) 。 (2.4) 因此T 2? L 2+bL+ b 23 (L+b 2) 呈线性关系,斜率为4π2g 。 2.3 弹簧法 该实验将利用“phyphox ”中的“弹簧”项目,测量悬挂不同质量重物弹簧的(平衡时的)下端位置x 和振动周期T 。通过对x ?T 2数据线性拟合,得到重力加速度g =斜率。之后,将考虑空气阻力,得到修正结果。 如图3所示,弹簧悬挂重物。设弹簧不悬挂重物时的平衡位置为x 0(是常量)、弹簧的弹性系数为k 、塑料袋重物的总质量为m 。 由受力平衡,得 mg =k (x ?x 0)。 (2.5) 再由弹簧的周期公式 T =2π√m k , (2.6) 消去m ,得 x =g (T 2π)2+x 0。 (2.7) 图3 弹簧法实验示意图 图2 复摆法实验示意图
附件:测量系统分析 7.1测量系统的重复性和再现性分析方法(简称%R&R或%GR&R) 工序量具、产品和质量特性; 7.1.2 选择使用极差法,均值和极差法中的其中一种方法对检验、测量和试验设备进行分析。 7.1.3 从代表整个工作范围的过程中随机抽取样品进行。 7.1.4 %R&R测量系统分析的工作人员在进行检验、测量和试验设备测量系统的重复性和再现性分析时,必须先对被分析的检验、测量和试验设备进行零件评价人平均值和重复性极差分析,同时所分析的零件评价人平均值和重复性极差之结果必须均受控方可进行被检验、测量和试验设备测量系统的重复性和再现性分析工作;否则该检验、测量和试验设备的测量系统不能检查出零件间的变差且不能将其用于过程控制中。 7.1.5 零件评价人平均值和重复性极差分析: 选择2-3个操作员(至少2人)在全然不知情的状况下利用校准合格的量具对随机抽取的5-10个样品进行盲测,每个操作员对同一样品的同一特性在盲测的情况下重复测量2-3次。 A)、被测量的产品由进行%R&R测量系统分析的工作人员将其进行编号,但这些编号不能让进行测量工作的操作员知道和看到。 B)、让操作员A以随机盲测的顺序测量5-10个样品,等操作员A把5-10个样品第一次测量完后由进行%R&R测量系统分析的工作人员将其重新混合,再让操作员A 以随机盲测的顺序进行第二次测量5-10个样品,第三次随机盲测则以此类推;在操作员A把5-10个样品共2-3次全部测量完后由进行%R&R测量系统分析的工作人员将其重新混合,然后让操作员B和/或C在不互相看对方的数据下测量这5-10个样品,操作员B和/或C的2-3次随机盲测同操作员A的随机盲测方法。 操作员或进行%R&R测量系统分析的工作人员将所测量的结果记录于“零件评价人平均值和重复性极差控制图”上。 ,依据“零件评价人平均值和重复性极差控制图”上的数据和产品质量特性规格进行计算和分析,并将其分析的结果记录于“零件评价人平均值和重复性极差控制图”上。 结果分析: A)、如果所有的极差都受控(即:均在控制限内),那么评价人是一致的,则方可进行下一步骤(即B);如果所有的极差都不受控,那么可能是由于评价人技术,位置误差或仪器的一致性不好所造成,则在进行下一步骤(即:B)之前应先纠正这些特殊原因,并使极差图进入控制中,方可进行下一步骤(即:B)。 B)、如果有一半以上或更多的平均值落在控制限之外,则该测量系统足以检查出零件间变差,并且该测量系统可以提供控制该过程的有用数据;如果有一半以下的平均值落在控制限之外,则该测量系统不足以检查出零件间变差,并且不能用于过程控制,同时不能进行该检验、测量和试验设备测量系统的重复性和再现性分析工作。 选择2-3个操作员(至少2人)在全然不知情的状况下利用校准合格的量具对随机抽取的5-10个样品进行盲测,每个操作员对同一样品的同一特性重复测量2-3次。A)、被测量的产品由进行%R&R测量系统分析的工作人员将其进行编号,但这些编号不能让进行测量工作的操作员知道和看到。
一、复摆法测重力加速度 一.实验目的 1. 了解复摆的物理特性,用复摆测定重力加速度, 2. 学会用作图法研究问题及处理数据。 二.实验原理 复摆实验通常用于研究周期与摆轴位置的关系,并测定重力加速度。复摆是一刚体绕固定水平轴在重力作用下作微小摆动的动力运动体系。如图1,刚体绕固定轴O在竖直平面内作左右摆动,G是该物体的质心,与轴O的距离为h,θ为其摆动角度。若规定右转角为正,此时刚体所受力矩与角位移方向相反,则有 θ =, (1) M- sin mgh 又据转动定律,该复摆又有
θ I M = , (2) (I 为该物体转动惯量) 由(1)和(2)可得θωθ sin 2-= , (3) 其中I mgh = 2 ω。若θ很小时(θ在5°以内)近似有 θωθ 2-= , (4) 此方程说明该复摆在小角度下作简谐振动,该复摆振动周期为 mgh I T π =2 , (5)
设G I 为转轴过质心且与O 轴平行时的转动惯量,那么根据平行轴定律可知 2mh I I G += , (6) 代入上式得 mgh mh I T G 2 2+=π , (7) 设(6)式中的2mk I G =,代入(7)式,得 gh h k mgh mh mk T 2 22222+=+=π π, (11) k 为复摆对G (质心)轴的回转半径,h 为质心到转轴的距离。对(11)式平方则有 2 2222 44h g k g h T ππ+=, (12) 设22,h x h T y ==,则(12)式改写成 x g k g y 2 2244ππ+=, (13) (13)式为直线方程,实验中(实验前摆锤A 和B 已经取下) 测出n 组 (x,y)值,用作图法求直线的截距A 和斜率B ,由于g B k g A 2 224,4ππ==,所以
一、第二阶段(M 测量阶段)总结 定义阶段已经产生了一个项目章程和项目团队,并对需要改进的过程进行了概述,列出了顾客关心的关键质量特性CTQs 。在测量阶段,需要从数据的角度来理解流程的现状,从而寻找问题的源头或位置,即寻找聚焦的问题。测量阶段的知识将有助于您缩小范围进入分析阶段寻找影响CTQ 的潜在根本原因。测量阶段一项重要部分就是要建立项目过程能力水平的基线。 M 阶段已经完成,A 阶段工作正在有条理的进行着,针对M 阶段项目所遇到的相关分析工具以及技术性问题,我做了如下的总结讨论。 的内容。 量具的重复性和再现性研究(Gage R&R),实际上就是执行一系列的实验,来研究测量系统的重复性和再现性相对于被测对象而言是否足够。实验包括:(1)多个操作者、多个样品、多次测量实验;(2)数据必须均衡,每个操作者须测量每个样品相同次数;(3)例:3个操作者分别测量7个样品,每个测量2次;(4)样品就能代表过程中的变化范围;(5)操作者应随机盲目地进行测试,最好不要知道自己是在做实验,不能带有“偏见性”;同时在记录结果时,操作者不应知道在测量哪个样品。 (1) MSA 测量系统的分类:(1)1人多机的MSA ——自动监测,人的干预较少;(2)多人1 机的MSA ——手动监测,人工干预较多;(3)多人多机的MSA ——自动、手动同时监测,人工干预较多;(4)人机混合的MSA ——难度最大,属于连贯性监测;(5)PT 与PTV 的区别——在进行MSA 时,PTV 很容易就满足条件,而PT 则不容易被满足。
(2)例1:测量某工件的长度分别为200mm、220mm、240mm、260mm,长度的规格值在±2mm之间,对所测量的数据进行PT及PTV的分析。①PTV1:长度测量仪器可以分开,指200mm、220mm、240mm、260mm能够被测量仪器识别的参数;②PT1:200mm±2mm、220mm±2mm、240mm±2mm、260mm±2mm,指能够分辨出具体长度的仪器识别参数(3)例2:假设工件的跨度从20mm改变为40mm,则PT及PTV将如何改变,测量仪器的精确度不变①PTV2:200mm、240mm、280mm、320mm,用同样精密的仪器测量,PTV2比PTV1更容易合格;②PT2:200mm±2mm、240mm±2mm、280mm±2mm、320mm ±2mm,采用同样精密度的仪器,PT2比PT1更容易合格 总体而言,观测到的过程偏差(σ Total)往往由过程的真正偏差(σ part-to-part )和测 量系统的重复性和再现性(σ R&R )两部分组成,测量系统研究就是要评估:测量系统的重复性和再现性偏差相对于观测到的过程偏差而言是否足够小。 测量系统指标判断准则 (1) (2) (3) 测量系统往往存在一下问题: (1)偏差或准确性差——测量平均值与被测件真值有很大差异 (2)精确性差—同样过程、同一被测件,多次测量值很大差异;“重复性不好”、“再现性不好” (3)量具不稳定——测量值随着时间的变化产生较大差异 (4)分辨率不够——般要求分辨率至少是被测件公差范围的1/10或更高 《一》连续数据的测量系统分析 1、基础知识介绍 (1)期望特性与测试方法 (2)重复性与再现性的试验方法