编码器输出信号类型
一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中使用比较广泛。
增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。
1集电极开路输出
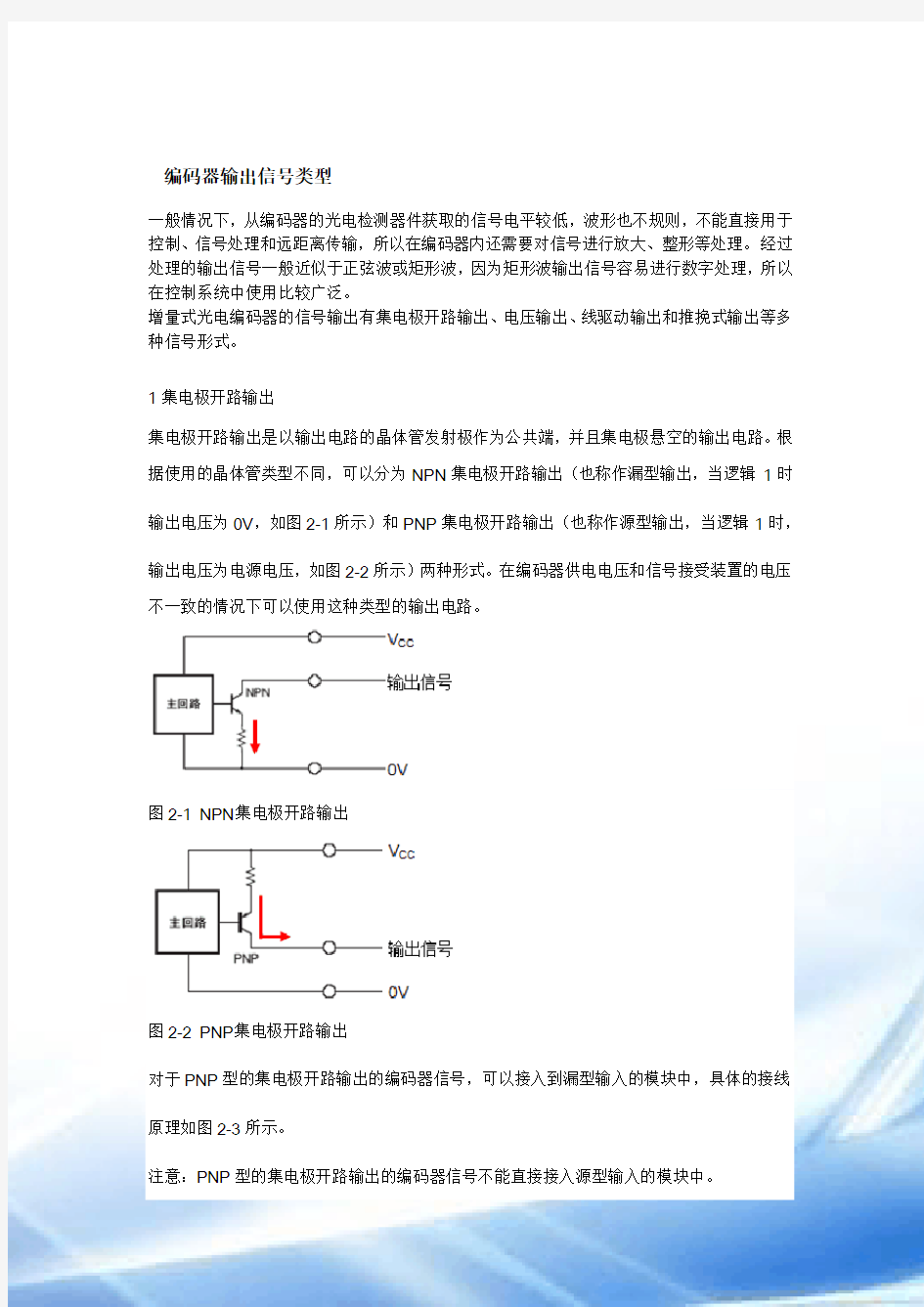
集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑1时输出电压为0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑1时,输出电压为电源电压,如图2-2所示)两种形式。在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。
图2-1 NPN集电极开路输出
图2-2 PNP集电极开路输出
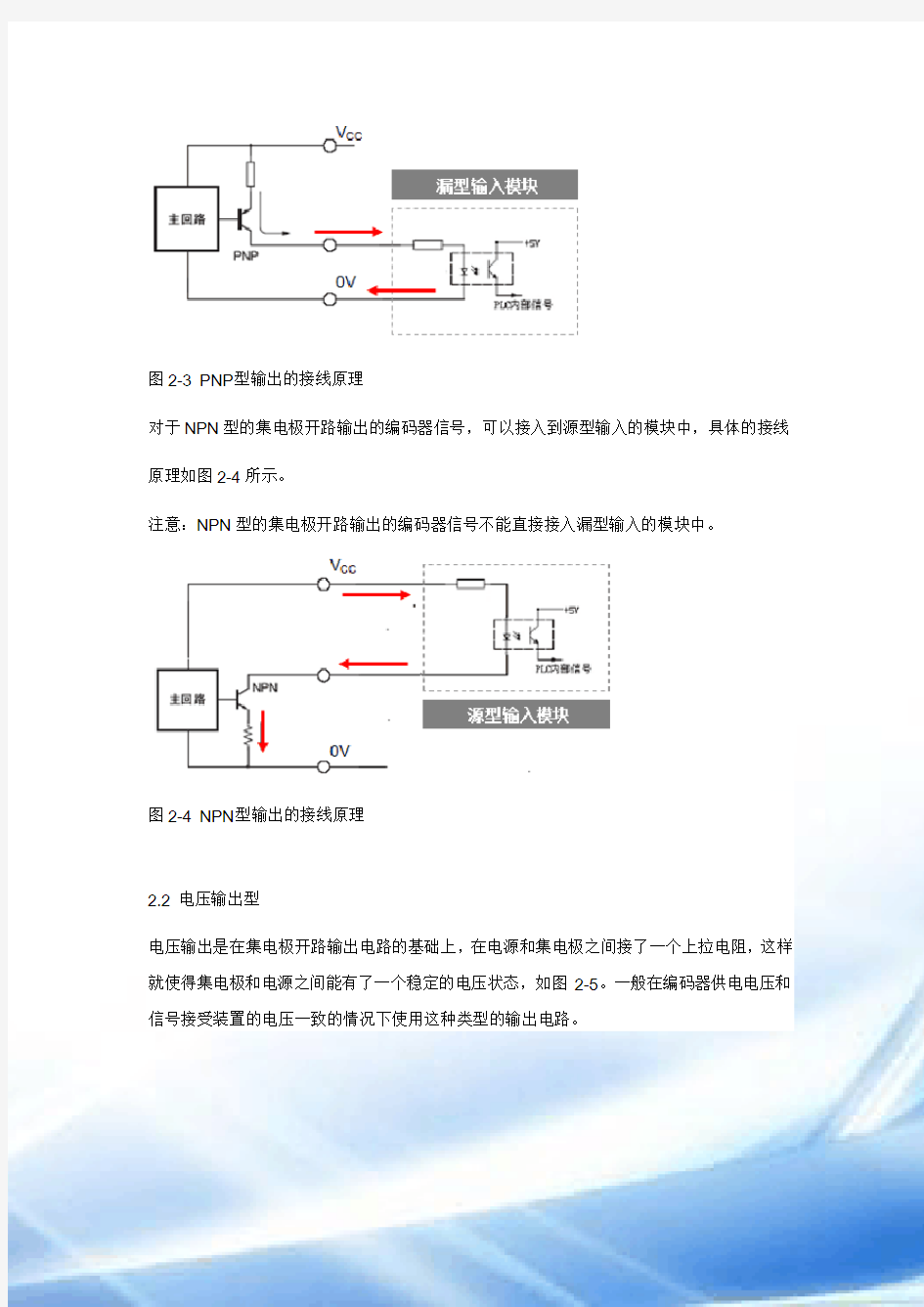
对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。
注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
图2-3 PNP型输出的接线原理
对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。
注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。
图2-4 NPN型输出的接线原理
2.2电压输出型
电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。
图2-5电压输出型
2.3推挽式输出
推挽式输出方式由两个分别为PNP型和NPN型的三极管组成,如图2-6所示。当其中一
个三极管导通时,另外一个三极管则关断,两个输出晶体管交互进行动作。
这种输出形式具有高输入阻抗和低输出阻抗,因此在低阻抗情况下它也可以提供大范围的电源。由于输入、输出信号相位相同且频率范围宽,因此它还适用于长距离传输。
推挽式输出电路可以直接和NPN和PNP集电极开路输入的电路连接,即可以接入源型或漏型输入的模块中。
图2-6推挽式输出
2.4线驱动输出
如图2-7所示,线驱动输出接口采用了专用的IC 芯片,输出信号符合RS-422标准,以差
分的形式输出,因此线驱动输出信号抗干扰能力更强,可以使用于高速、长距离数据传输的场合,同时还具有响应速度快和抗噪声性能强的特点。
图2-7线驱动输出
说明:除了上面所列的几种编码器输出的接口类型外,现在好多厂家生产的编码器还具有智
能通信接口,比如PROFIBUS总线接口。这种类型的编码器可以直接接入相应的总线网络,通过通信的方式读出实际的计数值或测量值,这里不做说明。
3 高速计数模块和编码器的兼容性
高速计数模块主要用于评估接入模块的各种脉冲信号,用于对编码器输出的脉冲信号进行计数和测量等。西门子SIMATIC S7的全系列产品都有支持高速计数功能的模块,可以适应
于各种不同场合的使用。
根据产品功能的不同,每种产品高速计数功能所支持的输入信号类型也各不相同,在系统设计或产品选型时要特别注意。下表3-1给出了西门子高速计数产品和编码器的兼容性信息,供选型时参考。
表3-1高速计数产品和编码器的兼容性
SIMATIC S7 系列产品
增量型编码器绝对值
编码器24V PNP 24V
NPN
24V推挽
式
5V 差分SSI
S7-200 /
S7-200 Smart CPU 集成的
HSC
√√√--
S7-1200 CPU 集成的
HSC
√√√--S7-300 CPU31xC 集成√-√--
的 HSC
FM350-1 √√√√-
FM350-2 √-√--
SM338 ----√S7-400 FM450-1 √√√√-ET200S 1Count 24V √√√--
1Count 5V ---√-
1SSI ----√
√√--S7-1500 TM Count
2x24V
TM PosInput2 ---√√
√√√--ET200SP TM Count
1x24V
TM PosInput1 ---√√√兼容; - 不兼容
4 编码器使用的常见问题
4.1编码器选型时要考虑哪些参数
在编码器选型时,可以综合考虑以下几个参数:
?编码器类型:根据使用场合和控制要求确定选用增量型编码器还是绝对性编码器。
?输出信号类型:对于增量型编码根据需要确定输出接口类型(源型、漏型)。
?信号电压等级:确认信号的电压等级(DC24V、DC5V等)。
?最大输出频率:根据使用场合和需求确认最大输出频率及分辨率、位数等参数。
?安装方式、外形尺寸:综合考虑安装空间、机械强度、轴的状态、外观规格、机械寿命等要求。
4.2如何判断编码器的好坏
可以通过以下几种方法判断编码器的好坏:
?将编码器接入PLC的高速计数模块,通过读取实际脉冲个数或码值来判断编码器输出是否正确。
?通过示波器查看编码器输出波形,根据实际的输出波形来判断编码器是否正常。
?通过万用表的电压档来测量编码器输出信号电压来判断编码器是否正常,具体操作方法如下:
1)编码器为NPN晶体管输出时,用万用表测量电源正极和信号输出线之间的电压?导通时输出电压接近供电电压
?关断时输出电压接近0V
2)编码器为PNP晶体管输出时,用万用表测量测量电源负极和信号输出线之间的电压?导通时输出电压接近供电电压
?关断时输出电压接近0V
4.3计数不准确的原因及相应的避免措施
在实际使用中,导致计数或测量不准确的原因很多,其中主要应注意以下几点:?编码器安装的现场环境有抖动,编码器和电机轴之间有松动,没有固定紧。
?旋转速度过快,超出编码器的最高响应频率。
?编码器的脉冲输出频率大于计数器输入脉冲最高频率。
?信号传输过程中受到干扰。
针对以上问题的避免措施:
?检查编码器的机械安装,是否打滑、跳齿、齿轮齿隙是否过大等。
?计算一下最高脉冲频率,是否接近或超过了极限值。
?确保高速计数模块能够接收的最大脉冲频率大于编码器的脉冲输出频率。
?检查信号线是否过长,是否使用屏蔽双绞线,按要求做好接地,并采取必要抗干扰措施。
4.4空闲的编码器信号线该如何处理
在实际的使用中,可能会遇到不需要或者模块不支持的信号线,例如:
?对于带零位信号的AB正交编码器(A、B、N),模块不支持N相输入或者不需要Z信号。
?对于差分输出信号(A、/A,B、/B,N、/N),模块不支持反向信号(/A,/B,/N)
的输入。
对于这些信号线,不需要特殊的处理,可以直接放弃不用!
4.5增量信号多重评估能否提高计数频率
对于增量信号,可以组态多重评估模式,包括双重评估和四重评估。四重评估是指同时对信号A和B的正跳沿和负跳沿进行判断,进而得到计数值,如图4-1所示。对于四重评估的
模式,因为对一个脉冲进行了四倍的处理(四次评估),所以读到的计数值是实际输入脉冲数的四倍,通过对信号的多重评估可以提高测量的分辨率。
图4-1四重评估原理图
通过以上对增量信号多重评估原理的分析可以看出,多重评估只是在原计数脉冲的基础上对计数值作了倍频处理,而实际上对实际输入脉冲频率没有影响,所以也不会提高模块的最大
计数频率。例如,FM350-2的最大计数频率为10kHz,那么即使配置为四重评估的模式,其最大的计数频率还是10kHz。
H.265/H.264高清视频编码器 上海禾鸟电子科技有限公司荣誉出品
一、产品简介 H.265/H.264高清视频编码器有HDMI\SDI\VGA三种高清接口产品,是由上海禾鸟电子自主研发的用于高清视频信号编码及网络传输直播的硬件设备,采用最新高效 H.265/H.264高清数字视频压缩技术,具备稳定可靠、高清晰度、低码率、低延时等特点。输入高清HDMI、SDI、VGA高清视频、音频信号,进行编码处理,经过DSP芯片压缩处理,输出标准的TS网络流,直接取代了传统的采集卡或软件编码的方式,采用硬编码方式,系统更加稳定,图像效果更加完美,广泛用于各种需要对高清视频信号及高分辨率、高帧率进行采集并基于IP 网络传送的场合,强大的扩展性更可轻易应对不同的行业及需求,可作为视频直播编码器,录像,传输等应用。采用工业控制精密设计,体积小,方便安装,功率小于5W,更节能,更稳定。 特点: ●高性能硬件编码压缩 ●支持H.265高效视频编码 ●支持H.264 BP/MP/HP ●支持AAC/G.711高级音频质编码格式 ●CBR/VBR码率控制,16Kbps~12Mbps ●网络接口采用100M、1000M 全双工模式 ●主流,副流可推流不同的服务器 ●支持高达720P,1080P@60HZ的高清视频输入 ●支持图像参数设置 ●HDMI编码支持HDCP协议,支持蓝光高清 ●支持HTTP,UTP,RTSP,RTMP,ONVIF 协议 ●主流与副流采用不同的网络协议进行传输 ●WEB操作界面,中英文配置界面可选 ●WEB操作界面权限管理 ●支持广域网远程管理(WEB) ●支持流分辨率自定义输出设置 ●支持码流插入中英文字功能,字体背景、颜色可选 ●支持码流插入3幅透明图像水印功能,XY轴可设置 ●支持一键恢复出厂配置 二、产品应用: 1、4G移动直播高清前端采集 2、高清视频直播服务器 3、视频会议系统视频服务器 4、数字标牌高清流服务器 5、教学直播录像系统前端采集 6、IPTV电视系统前端采集
增量型编码器与绝对型编码器的区分 编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增量型编码器 (旋转型) 工作原理: 由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。 由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。 编码器码盘的材料有玻璃、金属、塑料,玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高,金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级,塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率—编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 信号输出: 信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL 也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接—编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。 如单相联接,用于单方向计数,单方向测速。 A.B两相联接,用于正反向计数、判断正反向和测速。 A、B、Z三相联接,用于带参考位修正的位置测量。 A、A-, B、B-,Z、Z-连接,由于带有对称负信号的连接,电流对于电缆贡献的电磁场为0,衰减最小,抗干扰最佳,可传输较远的距离。 对于TTL的带有对称负信号输出的编码器,信号传输距离可达150米。 对于HTL的带有对称负信号输出的编码器,信号传输距离可达300米。
增量式编码器的A.B.Z 编码器A、B、Z相及其关系
TTL编码器A相,B相信号,Z相信号,U相信号,V相信号,W相信号,分别有什么关系? 对于这个问题的回答我们从以下几个方面说明: 编码器只有A相、B相、Z相信号的概念。 所谓U相、V相、W相是指的电机的主电源的三相交流供电,与编码器没有任何关系。“A相、B相、Z相”与“U相、V相、W相”是完全没有什么关系的两种概念,前者是编码器的通道输出信号;后者是交流电机的三 相主回路供电。 而编码器的A相、B相、Z相信号中,A、B两个通道的信号一般是正交(即互差90°)脉冲信号;而Z相是零脉冲信号。详细来说,就是——一般编码器输出信号除A、B两相(A、B两通道的信号序列相位差为90度)外,每转一圈还输出一个零位脉冲Z。 当主轴以顺时针方向旋转时,输出脉冲A通道信号位于B通道之前;当主轴逆时针旋转时,A通道信号则位于B通道之后。从而由此判断主轴是正转还是反转。 另外,编码器每旋转一周发一个脉冲,称之为零位脉冲或标识脉冲(即Z相信号),零位脉冲用于决定零位置或标识位置。要准确测量零位脉冲,不论旋转方向,零位脉冲均被作为两个通道的高位组合输出。由于通道之间的相位差的存在,零位脉冲仅为脉冲长度的一半。 带U、V、W相的编码器,应该是伺服电机编码器 A、B相是两列脉冲,或正弦波、或方波,两者的相位相差90度,因此既可以测量转速,还可以测量电机的旋转方向Z相是参考脉冲,每转一圈输出一个脉冲,脉冲宽度往往只占1/4周期,其作用是编码器自我校正用的,使得编码器在断电或丢失脉冲的 时候也能正常使用。 ABZ是编码器的位置信号,UVW是电机的磁极信号,一般用于同步电机; AB对于TTL/HTL编码器来说,AB相根据编码器的细分度不同,每圈有很多个,但Z相每圈只有一个; UVW磁极信号之间相位差是120度,随着编码器的角度转动而转动,与ABZ 之间可以说没有直接关系。 /#############################################################
H.265/H.264 HDMI编码器 产品使用说明书
目录 一、产品概述 1.产品概述 2.应用场景 3.产品参数 二、浏览器使用说明 1.系统登录 2.预览界面 3.编码器设置 3.1 系统设置 3.2 网络设置 3.3 音视频设置 3.4 安全设置 三、VLC播放器设置 前言 感谢您使用本公司网络高清编码器产品,该产品是针对安防视频监控、IPTV网络直播、远程教学、远程医疗、庆典典礼、远程视频会议、自媒体直播应用的HDMI网络高清编码器。采用高性能、单片SOC 芯片实现集音视频采集、压缩、传输于一体的媒体处理器,标准的H.265和H.264 Baseline 以及 Mainprofile 编码算法确保了更清晰、更流畅的视频传输效果。内嵌 Web Server 允许用户通过 IE 浏览器方便地实现对前端视频的实时监看和远程控制。 该产品实际测试乐视云、百度云、目睹、Youtube和Wowza等服务媒体服务器,兼容海康威视H.265的NVR产品,支持TS流、RTMP、HTTP、RTSP和ONVIF等视频协议;支持AAC、G.711U和G.711A等音频编码。以及需要运用到远程网络视频传输及直播的各种场合,本产品易于安装,操作简便。 声明:我们保留随时更改产品和规格,恕不另行通知。这些信息不会被任何暗示或其他任何专利或其它权利转让任何许可。 读者对象:
本手册主要适用于以下工程师: 系统规化人员 现场技术支持与维护人员 负责系统安装、配置和维护的管理员 进行产品功能业务操作的用户 TS-H264-B 型号: 一、产品概述 1.产品概述,该产品采用华为最先进的H.265网络高清数字音视频芯片压缩技术,具有稳定可靠、高清晰、低码率、低延时等技术特点。该产品输入为高清HDMI视频信号,经过主芯片视频压缩编码处理,通过网络输出标准的TS流和RTMP视频流。该产品的推出填补了行业内空白,直接取代了传统的视频采集卡,使用嵌入式操作系统保证产品更加稳定。采用工业级铝合金外壳设计,体积小,方便安装。 2.应用场景,产品主要用于网络视频直播,点播和录像监控等场景。 3.产品参数
Arduino关于旋转编码器程序的介绍介绍 旋转或编码器是一个角度测量装置. 他用作精确测量电机的旋转角度或者用来控制控制轮子(可以无限旋转,而电位器只能旋转到特定位置)。其中有一些还安装了一个可以在轴上按的按钮,就像音乐播放器的控制按钮。Some of them are also equipped with a pushbutton when you press on the axis (like the ones used for navigation on many music controllers). 它们的精度多种多样,有每圈16步到1024步的各种,价格也从2到200欧元不等。 我写了一个小例子去读旋转编码器,并且使将读数通过RS232显示。我们很容易实现当编码器每走一步更新一下计数,并且将它通过串口显示在电脑上(通过串口监视器)。这个程序在ALPS STEC12E08编码器(每圈有24步)上运行良好。但是我认为当它使用在一个有更高精度的编码器上时有可能就会失效或者当电机旋转很快,或者你拓展这个程序以适应多个编码器。请先试试他吧。 我在Arduino distribution(A VRLib的一部分)的encoder.h中学会了怎样操作编码器。谢谢作者:Pascal Stang,感谢他对每一个函数友好而详细的解释。如下: Example 1 /* Read Quadrature Encoder * Connect Encoder to Pins encoder0PinA, encoder0PinB, and +5V. * * Sketch by max wolf / https://www.doczj.com/doc/0b3037790.html, * v. 0.1 - very basic functions - mw 20061220 * */ int val; int encoder0PinA = 3; int encoder0PinB = 4; int encoder0Pos = 0; int encoder0PinALast = LOW; int n = LOW; void setup() { pinMode (encoder0PinA,INPUT); pinMode (encoder0PinB,INPUT); Serial.begin (9600); } void loop() { n = digitalRead(encoder0PinA); if ((encoder0PinALast == LOW) && (n == HIGH)) {//上升沿
P+F Absolute Rotary Encoder通讯参数设置 型号
1、地址选择和终端电阻1.1站地址 1.2 终端电阻 2、信号和电源线的连接
3、安装GSD文件 GSD文件为电子设备数据库文件,是可读的ASCII码文件。不同厂家的PROFIBUS产品集成在一起,生产厂家必须以GSD文件方式提供这些产品的功能参数,例如I/O点数、诊断信息、传输速率、时间监视等。在Step 7 的SIMATIC 管理器中打开硬件组态工具HW Config ,安装GSD后,在右边的硬件目录PROFIBUS DP→Additional Field Devices→Encoders→ENCODER将会出现刚刚安装的P+F Rotary Encoder。其数据传输原理如图所示。 4、组态通讯参数
在Step 7硬件配置窗口中,双击P+F Rotary Encoder 图标,打开编码器(DP Slave)的参数设置窗口,如图所示。结合工程实际,在此窗口中进行参数设置: a、代码顺序(Code Sequence):计数方向, CW(顺时针旋转,代码增加),CCW (逆时针旋转,代码增加); b、标定功能控制(Scaling function control):只有设置成Enable ,下面 c、d和e的设置才会生效; c、单圈分辨率(Measuring units per revolution):8192; d、测量范围高位(Total measuring range(units)hi): 512; e、测量范围低位(Total measuring range(units)lo): 0; f、其它参数采用默认值。 注:1、由c可以计算出编码器每圈产生(=8192)个二进制码,即单圈精度为13位。2、由d和e可以计算出编码器最大可以转(=512×65536+0)圈,即多圈精度为12位。 5、预置值 6、LED状态灯指示信息
海湾电子编码器安装使用说明书 一、概述 GST-BMQ-2电子编码器(以下简称编码器)可对电子编码的探测器或模块进行地址码、灵敏度、设备类型等的读出和地址码、灵敏度的写入功能,还可以对火灾显示盘进行地址码、灯号及二次码的读出和写入。 二、特点 1. 该编码器采用手握式结构,外形小巧,携带方便,操作简单; 2. 该编码器可通过编码器后盖的总线接口,直接和总线型探测器旋接,进行编码等操 作,更加方便,如图2所示(略); 3. 可对公司生产的总线型探测器、模块等设备编码,可对ZF-GST8903火灾显示盘、 JTY-HM-GST102线型光束感烟火灾探测器、JTY-HF-GST102线型光束感烟火灾探测器、隔爆点型可燃气体探测器等I2C接口设备编码; 4. 四位段码式液晶显示,显示直观; 5. 低功耗睡眠和自动关机功能; 6. 电池欠压指示功能 三、技术特性
1. 电源:1节9V叠式电池 2. 工作电流≤8mA 3. 待机电流≤100чA 4. 使用环境: 温度:-10℃~+50℃ 相对湿度≤95%,不凝露 5. 尺寸:164mm×64mm×37mm 四、结构特征 外形示意图如图1所示(略) 1:电源开关 2:液晶屏 3:总线插口 4:火灾显示盘接口(I2C) 5:复位键 6:固定螺丝 7:电池盒后盖 8:铭牌 9:JTY-GD-G3、JTY-ZCD-G3N探测器总线接口 10:JTY-GM-GST9611、JTW-ZOM-GST9612型探测器总线接口11:电池盒后盖螺丝 12:保护盖 其中各部分名称和功能说明如下:
1. 电源开关:完成系统硬件开机和关机操作。 2. 液晶屏:显示有关探测器的一切信息和操作人员输入的相关信息,并且当电源欠压时给出指示。 3. 总线插口:编码器通过总线插口与探测器或模块相连。 4. 火灾显示盘接口(I2C):编码器通过此接口与ZF-GST8903火灾显示盘或以I2C编程方式编码的探测器相连。 5. 复位键:当编码器由于长时间不使用而自动关机后,按下复位键可以使系统重新上电并进入工作状态。 6. 固定螺丝:将编码器的印制板固定好,并且将编码器的前盖好后盖安装在一起。 7. 电池盒后盖:内部放置电池。 8. 铭牌:贴于编码器背面。 9. JTY-GD-G3、JTY-ZCD-G3N型探测器总线接口:旋接JTY-GD-G3、JTY-ZCD-G3N探测器。 10. JTY-GM-GST9611、JTW-ZOM-GST9611、JTW-ZOM-GST9612探测器。 11. 电池盖螺丝:将电池固定好。 12. 保护盖:保护后盖的总线接口,以免发生短路等事故。 五、使有及操作 1. 电池的初次安装 打开电池盖螺丝和电池盒后盖,将电池正确扣在电池扣上,装在电池盒内,盖好后盖,拧紧螺丝。
绝对值旋转编码器程序 #include // 寄存器头文件包含 #include // 寄存器头文件包含 #include // 空操作函数,移位函数头文件包含 #define uchar unsigned char #define uint unsigned int /* sbit SH_CP = P1^1; //移位时钟脉冲端口 sbit DS = P1^2; // 串行数据输入端口 sbit ST_CP = P3^7; //锁存端口 */ int inc_data=0; //每刷新一次的增量值 int jms=0; //累计增量 int m_iPrvSSI = 0; int m_bIsSPI = 0; uchar uPrvState = 0; sbit AA = P3^3;// sbit BB = P3^4;//这个是时钟 sbit ZZ = P3^5;//这个是数据 sbit BEEP=P1^5; //正反判断 bit t_bFang = 1; int a; int iSSI = 0;
int temp,num,j; uchar led_buf[12]; /*定义LED显示缓冲区*/ uchar code table[]="0123456789"; void delay (int t) { int i,j; for(i=1;i for (j=1;j } void GetSSI(void) { uchar ix = 0; // uchar uState = 0; //状态位数据 int iSSI = 0;//当前的角度数据(0-1023) bit bCrc = 0; // 奇数或偶数标志位 int ire = 0; //增量数据,表示上次正确读的数据,和这次正确读的位置差 AA = 0; //CSN _nop_();_nop_(); BB = 0;//CLK _nop_();_nop_(); BB = 1;//CLK _nop_();_nop_(); for(ix = 0; ix { BB = 0;//CLK
数控铣床的工作原理 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理! 更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 数控机床是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作数控折弯机并加工零件。 数控机床的机床本体与传统机床相似,由主轴传动装置、进给传动装置、床身、工作台以及辅助运动装置、液压气动系统、润滑系统、冷却装置等组成。但数控机床在整体布局、外观造型、传动系统、刀具系统的结构以及操作机构等方面都已发生了很大的变化,这种变化的目的是为了满足数控机床的要求和充分发挥数控机床的特点。 ⑵、CNC单元 CNC单元是数控机床的核心,CNC单元由信息的输入、处理和输出三个部分组成。CNC单元接受数字化信息,经过数控装置的控制软件和逻辑电路进行译码、插补、逻辑处理后,将各种指令信息输出给伺服系统,伺服系统驱动执行部件作进给运动。 ⑶输入/输出设备 输入装置将各种加工信息传递于计算机的外部设备。在数控机床产生初期,输入装置为穿孔纸带,现已淘汰,后发展成盒式磁带,再发展成键盘、磁盘等便携式硬件,极大方便了信息输入工作,现通用DNC网络通讯串行通信的方式输入。 输出指输出内部工作参数(含机床正常、理想工作状态下的原始参数,故障诊断参数等),一般在机床刚工作状态需输出这些参数作记录保存,待工作一段时间后,再将输出与原始资料作比较、对照,可帮助判断机床工作是否维持正常。
编码器输出信号类型 一般情况下,从编码器的光电检测器件获取的信号电平较低,波形也不规则,不能直接用于控制、信号处理和远距离传输,所以在编码器内还需要对信号进行放大、整形等处理。经过处理的输出信号一般近似于正弦波或矩形波,因为矩形波输出信号容易进行数字处理,所以在控制系统中应用比较广泛。 增量式光电编码器的信号输出有集电极开路输出、电压输出、线驱动输出和推挽式输出等多种信号形式。 1集电极开路输出 集电极开路输出是以输出电路的晶体管发射极作为公共端,并且集电极悬空的输出电路。根据使用的晶体管类型不同,可以分为NPN集电极开路输出(也称作漏型输出,当逻辑1时输出电压为0V,如图2-1所示)和PNP集电极开路输出(也称作源型输出,当逻辑1时,输出电压为电源电压,如图2-2所示)两种形式。在编码器供电电压和信号接受装置的电压不一致的情况下可以使用这种类型的输出电路。 图2-1 NPN集电极开路输出 图2-2 PNP集电极开路输出 对于PNP型的集电极开路输出的编码器信号,可以接入到漏型输入的模块中,具体的接线原理如图2-3所示。 注意:PNP型的集电极开路输出的编码器信号不能直接接入源型输入的模块中。
图2-3 PNP型输出的接线原理 对于NPN型的集电极开路输出的编码器信号,可以接入到源型输入的模块中,具体的接线原理如图2-4所示。 注意:NPN型的集电极开路输出的编码器信号不能直接接入漏型输入的模块中。 图2-4 NPN型输出的接线原理 2.2电压输出型 电压输出是在集电极开路输出电路的基础上,在电源和集电极之间接了一个上拉电阻,这样就使得集电极和电源之间能有了一个稳定的电压状态,如图2-5。一般在编码器供电电压和信号接受装置的电压一致的情况下使用这种类型的输出电路。
我用的是三菱PLC的FX2N,这里有A、B、Z相的HK38系列的增量式旋转编码器,将PLC 的X0,X1,X2分别接编码器的A相和B相及Z相,用PLC的双相计数器C252计数,虽然我知道A相超过B相90°为顺时针转,滞后就逆时针转,但不知道如何具体编程,我的目的是达到测旋转轴的角度,从-135°~-30°~-10°~10°~+30°~-135°,正反转旋转 多谢各位,我改了一下,但仍旧没找到问题原因,但测试中发现,接X2和X5都能使C252复位,尽管手册上说只有X2复位,但由于以上提到的Z相接入任何一个输入端都使之ON,所以我就避开了接X2和X5端子,改接其他的端子,比如X3,这并不是因为它是高速输入端的一种才选,其他端也一样,因此我采用了软件复位,也没办法了,效果倒是达到了想要的,
DHSZ D200 K8 C235 M8130 HSZ是高速区间比较指令,前面加D是32位的。运作如下: D200 > C235 M8130 ON D200<=C235>=k8 M8131 ON D200 < C235 M8132 ON
将旋转编码器的A相或B相的输出信号连接至X0~X5,(使用不同的计数器,接不同的输入点)然后用高速计数器对编码器的脉冲信号进行计数。以C235为例,只进行加计数,脉冲编码器的A相或B相需要接入PLC的X0,当设备带动编码器旋转,则X0就有信号输入,C235就会进行计数。使用很简单。 需求一段三菱PLC+旋转编码器+变频器实行多段距离控制,例如:上升总距离为50cm,0-15cm 实行20hz运行、16-25 cm 实行35HZ运行、26-35cm实行40HZ 运行、36-46cm实行20HZ 运行、47-50cm实行10HZ运行;下降反之! 程序中的数字,是按每厘米100个脉冲设计的,在实际中还要经过计算。
充注小车、运载小车定位使用说明 定位原理: 旋转编码器定位与老式的旋转变压器一样,实际上是一个计数器。我们目前使用的OMRON旋转编码器每旋转一周,能精确地发出1024脉冲,PLC依据旋转编码器发出的脉冲进行计数,再乖以固定机械变比与旋转半径的系数,就可以得出脉冲与实际行走距离的线性对应关系。 PLC利用高速计数模块QD62D读取旋转编码器的值并进行数字化处理,可以将脉冲数值转换成实际的距离值如mm。 目前我们设备都是利用旋转编码器的原始值进行处理的,所有触模屏上的距离值均为脉冲值而非实际距离值,这样在处理数据时比较方便直观。 根据这一对应关系利用普通变频器控制一般的三相鼠笼电机就能实现精度在1毫米左右定位系统,可以在许多定位要求不高的控制领域使用。 使用方法: 依据上述原理,定位系统定位首先必须选择一个参考点,以这点作为基准点,其它所有设置点均为到这一点的相对距离。当基点信号取的不稳定或不好,就会影响整个定位过程。 旋转编码器由一个联轴器与一套齿轮机构组合成一套测量机构。由于齿轮与齿轮之间存在间隙,运行一段时间后就会有误差积累,造成定位不准,这时不要改变屏上设定数据,而是在运行机构运行一段时间后,让运行机构回到基点,进行一次清零,就可以消除积累误差。 旋转编码器定位机构的故障主要有定位不准、或运行数据无变化等等。 定位不准主要是由测量机构之间的间隙,联轴器、齿轮相对打滑。 一种定位不准就是干扰,现场已采用了一端接地的屏蔽等措施。出错时请严格检查测量线路(包抱QD62D联接器)有无断线、短路、屏蔽不严、模块供电电压不足等问题。 还有一种定位不准表现在:由于测量机构所能测量的最大频率不超过500KHz,因此对于变化速度太快脉冲系统不能及时测量,造成定位不准。因此系统要运行平稳,不能有速度突变。
SDI高清编码器使用说明 一、产品图: 二、产品概述: SDI高清编码器是一款专业的高清音视频编码及复用产品,该产品具有1路SDI音视频输入接口,支持H.264编码格式,可同时对视频音频进行编码。输出TS双码流设计,可根据不同需要设置每一路的输出码流分辨率,该设备具有高集成,低成本的优势,可广泛应用于各种数字电视播出系统中。支持3U结构,一台机箱可插入16张采集卡,双电源冗余结构,系统更稳定。全面支持VLC解码操作。 三、应用范围: 1、网络电视高清编码器 2、可接入NVR硬盘录像机 2、数字标牌高清流服务器 3、视频会议系统视频服务器 4、网络会议系统视频采集 5、代替高清视频采集卡 6、酒店宾馆有线电视系统 四、主要特性: ·H.264 Baseline Profile编码 ·H.264 Main Profile编码 . H.264 High Profile编码 ·MJPEG/JPEG Baseline编码 ·音频编码支持MPEG1 Audio Layer 2 . CBR/VBR/ABR码率控制,16kbit/s~40Mbit/s . 网络接口采用1000M 全双工模式 · 1通道SDI输入,支持VGA转SDI输入 ·支持高达720P,1080P的高清视频输入 ·支持图像参数设置 ·支持HDCP协议,支持蓝光高清 ·支持HTTP,UTP,RTSP,RTMP,ONVIF 协议 · WEB操作界面,中英文配置界面可选 . WEB操作界面权限管理 ·支持广域网远程管理(WEB) ·支持双码流输出 . 主码流与副码流可以采用不同的网络协议进行传输 ·支持流分辨率设置
·支持音频MP3与AAC格式选择 ·支持音频输出流单声道与立体声切换 ·支持GOP帧率设置 . 支持码流增加水印功能,XY轴,字体可设置 . 支持一键恢复默认配置 ·支持机顶盒解码 ·低功耗电源设计 ·3U高档机箱,主备电源自动切换功能,保证了系统的稳定输入: 音频: 系统:
增量式旋转编码器工作原理 增量式旋转编码器通过内部两个光敏接受管转化其角度码盘的时序和相位关系,得到其角度码盘角度位移量增加(正方向)或减少(负方向)。在接合数字电路特别是plc后,增量式旋转编码器在角度测量和角速度测量较绝对式旋转编码器更具有廉价和简易的优势。增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 增量式旋转编码器的内部工作原理(附图) 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90o,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。 A,B两点对应两个光敏接受管,A,B两点间距为 S2 ,角度码盘的光栅间距分别为S0和S1。 当角度码盘以某个速度匀速转动时,那么可知输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值相同,同理角度码盘以其他的速度匀速转动时,输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。如果角度码盘做变速运动,把它看成为多个运动周期(在下面定义)的组合,那么每个运动周期中输出波形图中的S0:S1:S2比值与实际图的S0:S1:S2比值仍相同。 通过输出波形图可知每个运动周期的时序为
在电缆生产线上,通常需要检测电缆的走线速度,用来控制收线电机的转速和计算线缆的长度。成缆工艺参数的稳定,直接关系到电线电缆的质量。 该项目是为某电缆厂的技术改造项目,要改造的设备是利用束线原理制造的盘绞式成缆机,改造的内容是更换全部电气控制系统。这种成缆机的放线盘固定,而收线盘固定在盘绞架上同时完成绞合和收线的双重运动。工作时,在线缆盘直流电机的带动下,完成电缆的收线运动,在排线电机的带动下实现电缆在收线盘的整齐排列。在大盘电机的带动下,通过齿轮箱带动盘绞架实现轴向旋转,完成电缆绞合运动,是保证节距的关键。线速度是由收线盘的旋转速度决定的,如果收线电机的转速恒定,收线盘随着收线轴的变粗,线速度会增大,因此,为保证收线速度恒定,要逐渐降低收线电机的转速。 1 系统设计原理 根据电缆的生产工艺要求,不同型号的电缆,其走线速度是恒定的。通常,电缆的运行速度是由电缆带动旋转编码器来检测的。电缆线速度测速示意图如图1所示。 该项目中,采用的旋转编码器的型号是TRDJ1000系列,旋转一周输出1 000个脉冲。因此,根据在一定时间内检测到的脉冲数,就可以计算出电缆的走线速度。实际应用中,将其与一加工精度极高、周长为500 mm的旋转编码器测量主动轮与旋转编码器同轴安装,主动轮与电缆接触。在电缆生产运动过程中,依靠摩擦力拉动测量轮旋转,这样就把电缆的直线位移(长度)转化为旋转编码器的脉冲数字信号输出。
设旋转编码器每旋转一周,其计数脉冲个数为NP(脉冲个数/转),则旋转编码器角分辨率(单位:(°)/个)为: P=360/NP 假定固定在旋转编码器转轴上的主动导向轮半径为r m,则旋转编码器位移分辨率(单位:m/个)为: Ps=27πr/NP 这时,若计数脉冲个数为N(个),则由旋转编码器测量的位移量S(单位:m)为: S=Ps·N 线缆走线速度V(单位:m/s)为: V=S/T 式中:T为接收N个脉冲所用的时间(单位:s)。 2 硬件电路设计原理 该检测电路以AT89C51单片机为控制核心,如图2所示,旋转编码器输出的脉冲,经过电平转换,变成O~5 V的TTL电平脉冲,送到AT89 C51单片机的外部中断INT0端。每收到
编码器的选型及技术解答 一、问:增量旋转编码器选型有哪些注意事项? 应注意三方面的参数: 1.机械安装尺寸,包括定位止口,轴径,安装孔位;电缆出线方式;安装空间体积;工作环境防护等级是否满足要求。 2.分辨率,即编码器工作时每圈输出的脉冲数,是否满足设计使用精度要求。 3.电气接口,编码器输出方式常见有推拉输出(F型HTL格式),电压输出(E),集电极开路(C,常见C为NPN型管输出,C2为PNP型管输出),长线驱动器输出。其输出方式应和其控制系统的接口电路相匹配。 二、问:请教如何使用增量编码器? 1,增量型旋转编码器有分辨率的差异,使用每圈产生的脉冲数来计量,数目从6到5400或更高,脉冲数越多,分辨率越高;这是选型的重要依据之一。 2,增量型编码器通常有三路信号输出(差分有六路信号):A,B和Z,一般采用TTL电平,A脉冲在前,B 脉冲在后,A,B脉冲相差90度,每圈发出一个Z脉冲,可作为参考机械零位。一般利用A超前B或B超前A进行判向,增量型编码器定义为轴端看编码器顺时针旋转为正转,A超前B为90°,反之逆时针旋转为反转B超前A为90°。也有不相同的,要看产品说明。 3,使用PLC采集数据,可选用高速计数模块;使用工控机采集数据,可选用高速计数板卡;使用单片机采集数据,建议选用带光电耦合器的输入端口。 4,建议B脉冲做顺向(前向)脉冲,A脉冲做逆向(后向)脉冲,Z原点零位脉冲。 5,在电子装臵中设立计数栈。 增量型编码器与绝对型编码器的区分:编码器如以信号原理来分,有增量型编码器,绝对型编码器。 增量型编码器(旋转型)工作原理:由一个中心有轴的光电码盘,其上有环形通、暗的刻线,有光电发射和接收器件读取,获得四组正弦波信号组合成A、B、C、D,每个正弦波相差90度相位差(相对于一个周波为360度),将C、D信号反向,叠加在A、B两相上,可增强稳定信号;另每转输出一个Z相脉冲以代表零位参考位。由于A、B两相相差90度,可通过比较A相在前还是B相在前,以判别编码器的正转与反转,通过零位脉冲,可获得编码器的零位参考位。编码器码盘的材料有玻璃、金属、塑料;玻璃码盘是在玻璃上沉积很薄的刻线,其热稳定性好,精度高。金属码盘直接以通和不通刻线,不易碎,但由于金属有一定的厚度,精度就有限制,其热稳定性就要比玻璃的差一个数量级。塑料码盘是经济型的,其成本低,但精度、热稳定性、寿命均要差一些。 分辨率:编码器以每旋转360度提供多少的通或暗刻线称为分辨率,也称解析分度、或直接称多少线,一般在每转分度5~10000线。 信号输出:信号输出有正弦波(电流或电压),方波(TTL、HTL),集电极开路(PNP、NPN),推拉式多种形式,其中TTL为长线差分驱动(对称A,A-;B,B-;Z,Z-),HTL也称推拉式、推挽式输出,编码器的信号接收设备接口应与编码器对应。 信号连接:编码器的脉冲信号一般连接计数器、PLC、计算机,PLC和计算机连接的模块有低速模块与高速模块之分,开关频率有低有高。如单相联接,用于单方向计数,单方向测速。A.B两相联接,用于正反向计数、判断正反向和测速。A、B、Z三相联接,用于带参考位修正的位臵测量。A、A-,B、B-,Z、Z-连接,
旋转编码器的应用 例:E6C-N绝对型多旋转高精度型旋转编码器与CPM1A PLC连接进行定位控制 一、连接示意图 型号E6C-NN5C 型号CPM1A-40CD□-□ 二、配线表 【型号E6C-NN5C和型号CPM1A的配线】 型号E6C-NN5C输出信号型号CPM1A 输入信号 单旋转导线外皮褐(20) 00000 数据颜色橙(21) 00001 (灰)黄(22) 00002 绿(23) 00003 蓝(24) 00004 紫(25) 00005 灰(26) 00006 白(27) 00007 粉红(28) 00008 多旋转导线外皮茶(20) 00100 数据颜色橙(21) 00101 (黑)黄(22) 00102 绿(23) 00103 蓝(24) 00104 紫(25) 00105 符号+=0 灰(26) 00106 -=1 白(27) 00107 三、输出时间 【输出时间】 型号E6C-NN5C的绝对值数据 1旋转 2旋转 127旋转 63999
四、梯形图程序 000通道的0 接点,输送到 (单旋转数 BIN) BIN BCD 001通道的 0~7接点,输送 到DM0003(多旋转 数据BIN) BIN 转换到BCD BCD)× 500(单旋转分辨率) 的结果存入 DM0005~6 比较带在DM0010/11的值与DM0012/13 的值间在线性绝对值数据时,输出01000 接点。(限正旋转时进行带域比较)
五、DM设定 【DM设定】 DM0000 0001 0002 0000 数据程序用工作区域 0003 0004 0005 0006 0007 线性绝对值数据 0008 0009 比较数据 0010 9000 0011 0000 上限值设定 0012 0500 0013 0001 下限值设定 注:上述梯形程序为参考例,有时会因程序控制器的数据读入时间而产生数据读取错误。这时,比较上次读入的数据与当前读入的数据。若超过100以上,则该数据作废。(多旋转数据变化时,同时读入单旋转数据与多旋转数据,则错误的数据也被读入。
通力V3F16L变频器维修,通力电梯3000机型驱动系统故障码含义详解 来源:未知作者:admin 时间:2012-11-09 22:26 点击: 1224 通力电梯3000机型驱动系统故障码含义详解通力V3F16L变频器维修 通力电梯3000机型驱动系统出现故障时,通常会出现一些故障码,来指示通力电梯3000机型发生故障的原因,下面将通力电梯3000机型驱动系统故障码的含义做一总结,供朋友们分享。 1、通力电梯3000机型出0101:驱动系统停止驱动,说明电梯在启动时,驱动系统检测电路检测到变频器有故障,由主板CPU 发出驱动系统停止驱动的指令。 2、通力电梯3000机型出0102:曳引电机过电流,说明供给曳引电机的电流过大,超过曳引电机所能承受的额定电流时,被驱动系统电流检测电路检出,发出过流报警信号。 3、通力电梯3000机型出0103:制动电阻损坏,当通力电梯的检测电路检测到驱动系统中制动电阻发生断路或阻值变大时,发出此故障0103故障码。 4、通力电梯3000机型出0104:曳引电机过热,当曳引电机发生过载或过流或热敏电阻损坏现象时,会引起曳引电机过热,被检测电路检出后,发出0104故障码。 5、通力电梯3000机型出0105:中间直流电压过低,当变频器三相整流电路中的二极管个别损坏或电网电压过低,或者滤波电容容量变小时,变频器直流电压检测电路检出直流电压过低情况时,就会出0105故障码。 6、通力电梯3000机型出0106:V3F不工作。当V3F变频器内部发生故障,和LCECPU375电路板不能通信时,就会出现0106故障码。 7、通力电梯3000机型出0107:称重装置故障。当称重装置发生故障或调试不当时,就会出现0107故障码。 8、通力电梯3000机型出0108:电动机出错。当曳引电机的三相供电相序不对、平衡系数不准、称重不准、电梯启动时抱闸没有打开、驱动参数设置不正确、或运行速度出现超速等现象时,就会出0108故障码。 9、通力电梯3000机型出0109:测速机或编码器故障。当测速发电机的胶轮磨损或碳刷磨损致使测速电机不能正常工作时,旋转编码器发生故障时,会出现0109故障码。 10、通力电梯3000机型出0110:散热器过热。当机房环境温度过高、变频器散热风扇发生故障导致散热不良时,会出现此故障码,进入更多通力变频器故障代码、、、 杭州智来机电精修通力电梯变频器:V3F16L,V3F18,V3F25,KDL16,KDL32,KDL、KDL、VFL、VF、VF。
习 题 二 2.2 系统的调速围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1)n n s n rpm D s ?==??=- 系统允许的静态速降为2.04rpm 。 2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,试问系统能够达到的调速围有多大?系统允许的静差率是多少? 解:1)调速围 max min D n n =(均指额定负载情况下) max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n === 2) 静差率 01515010%N s n n =?== 2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机 60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18 Ω,Ce=0.2V ?min/r,求: (1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少? (3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少?
解:(1)3050.18274.5/min N N n I R r ?=?=?= (2) 0274.5(1000274.5)21.5%N N S n n =?=+= (3) [(1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??= 2.7 某闭环调速系统的调速围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D N N -?=1/ 1015002%/98%N n =??? 15002%/98%10 3.06/min N n r ?=??= 2.9 有一V-M 调速系统:电动机参数P N =2.2kW, U N =220V , I N =12.5A, n N =1500 r/min ,电枢电阻R a =1.5Ω,电枢回路电抗器电阻RL=0.8Ω,整流装置阻R rec =1.0Ω,触发整流环节的放大倍数K s =35。要求系统满足调速围D=20,静差率S<=10%。 (1)计算开环系统的静态速降Δn op 和调速要求所允许的闭环静态速降Δn cl 。 (2)采用转速负反馈组成闭环系统,试画出系统的原理图和静态结构图。 (3)调整该系统参数,使当U n *=15V 时,I d =I N ,n=n N ,则转速负反馈系数 α应该是多少? (4)计算放大器所需的放大倍数。 解:(1) ()()/22012.5 1.5/1500201.25/15000.134min/N N a e e n U I R C C V r =-??=-?== ()//12.5 3.3/0.134307.836/min N N e op N e n U I R C n I R C r ∑∑=-???=?=?= ()()/1150010%/20*90%8.33/min N N n n s D s r ?=-=?=() 所以,min /33.8r n cl =? (2)
P O S I T A L编码器说明书 Prepared on 24 November 2020
POSITAL编码器资料 FRABA 编码器 德国博思特POSITAL编码器、POSITAL工业编码器、POSITAL倾角仪,POSITAL传感器、POSITAL线性传感器,POSITAL绝对值编码器、POSITAL旋转编码器等。 编码器行业领导者上海精芬德国博思特POSITAL编码器、POSITAL工业编码器、POSITAL倾角仪,POSITAL 传感器、POSITAL线性传感器,POSITAL绝对值编码器、POSITAL旋转编码器等,如需询价或详细信息,方案选型与精芬联系。德国POSITAL公司成立于1918年,致力于高端机电产品的研发及生产,是欧洲绝对值编码器产品的领跑者。该公司产品广泛应用于冶金、汽车制造、水利、物流、机械制造、木材加工、造船等行业。 以下021列举部分型号:OCD-S200G-1412-B15S-PRL、OCD-S200G-1212-B150-PRL、OCD-S200G-1212-B15S-CRW、OCD-S200G-1213-B150-CAW、OCD-S200B-1213-SA1C-CRS-150、OCD-S200G-1416-S060-PRL、OCD-S200G-1213-B15C-CAS-182、OCD-S200G-1416- S100-CAW、OCD-S200G-1212-C100-PRL、OCD-S200G-1412-B150-PRL、OCD-S100G-1212-B150-PAL、OCD-
S100G-0012-C100-PRL、OCD-S100G-1212-C10S-CRW-5m、OCD-S100G-1212-S100-PRL、OCD-S100G-1212- B15V-CAW-5m、OCD-S100G-0013-S100-PRL、OCD- S100G-1212-S10S-PRL、OCD-S100G-0016-S10S-PAL、OCD-S100B-1212-C10S-PRL、OCD-S100G-1416-C100-PRL、OCD-S100G-1213-C100-PA9、OCD-S100G-1213-C100-PAL、OCD-S100G-1212-S060-PRL-050、OCD- S100G-1212-B150-PRL、OCD-S100G-1213-C100-PRL、OCD-S100B-0016-B15S-CRW-136、OCD-S100G-1212-C100-PRL、OCD-S100G-1212-C100-CRW、OCD-S100G-1212-S060-PAL、OCD-S100B-0016-S060-PAL-135、OCD-S100G-0013-C100-PAL OCD-S100G-1213-T120-PRL、OCD-S100B-1212-S060-CRW、OCD-S100G-0016-T12C-CRW-163、OCD-S100G-1416-C10V-CAW-5m、OCD-S100G-1216-S10S-PRL、OCD-S100G-0016-T120-CRW、OCD-S100B-1212-C100-PRL、OCD-S100B-1212-B15V-CAW-5m、OCD-S100G-1212-B15S-PAL、OCD-S100B-0016-C100-CAW-5m、OCD-S100G-1212-C10S-PRL、OCD-S100B-0016-T120-CRW、OCD-S100G-1213-S10S-PRL、OCD-S100B-1213-C10S-PRL、OCD-S100G-0013-S060-PRL、OCD-S100B-0016-T120-PRL、OCD-SL00G-1213-SA1C-CRS-159、OCD-S100B-0016-B150-CRW、