摆动导杆机构运动特性分析
陶军张楷强
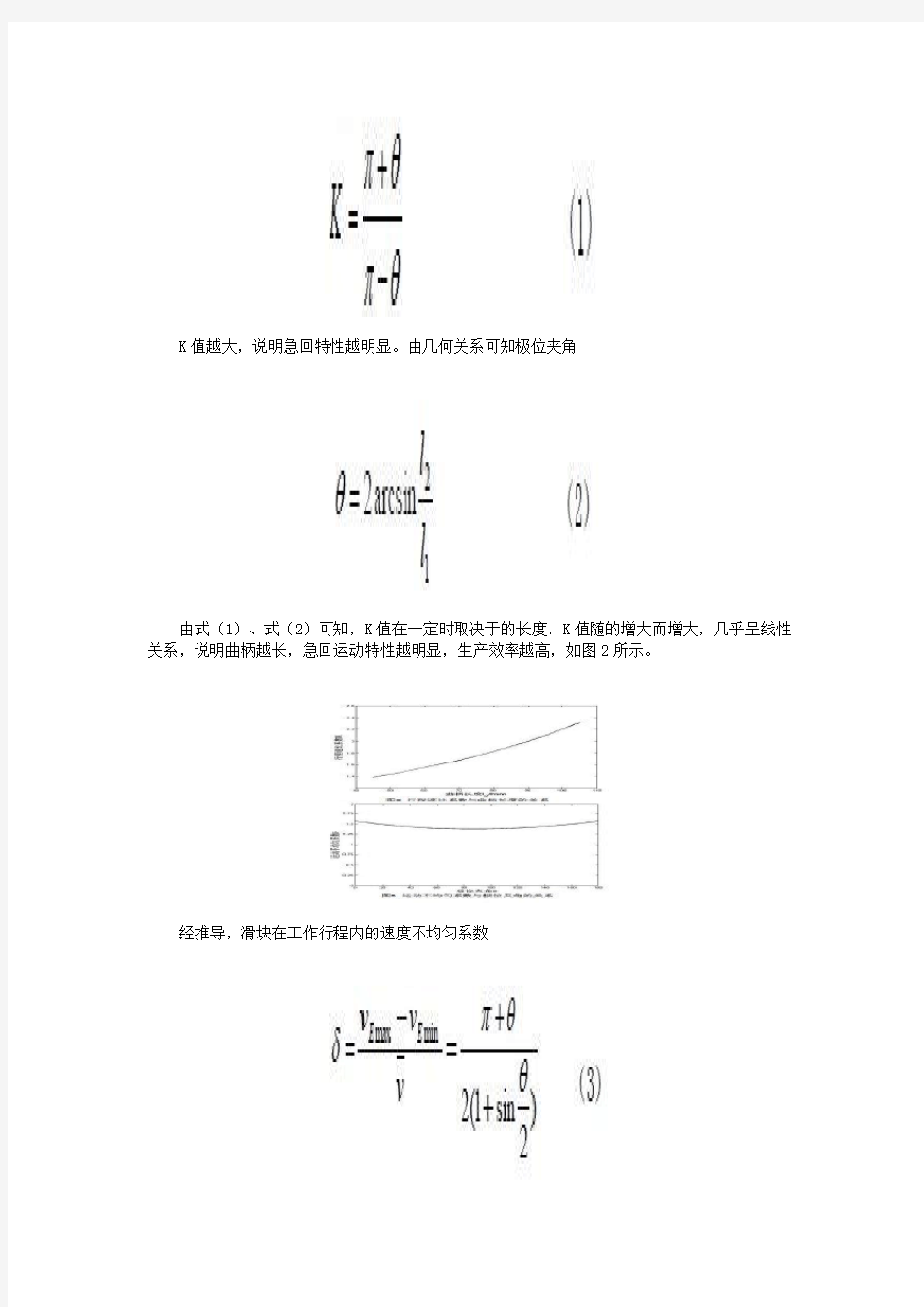
【摘要】该文研究了摆动导杆机构的行程速比系数及影响因素,计算了相关运动参数。研究结果表明,行程速比系数K主要与曲柄长度有关,行程速比系数K随曲柄长度的增大而增大,曲柄越长,行程速比系数K值越大,即机构的急回运动越明显,急回特性受到运动稳定性的影响;随着极位夹角的增大,输出滑块的工作行程速度平稳性略有好转。应用ADAMS软件对摆动导杆机构进行了运动仿真分析,得到了摆动导杆机构的运动线图,并应用ZNH-B型连杆机构实验台对急回特性的理论分析进行了实验验证,表明该文运动参数的选取是合理的。
【期刊名称】科技创新导报
【年(卷),期】2014(000)035
【总页数】2
【关键词】摆动导杆机构急回特性极位夹角行程速比系数
摆动导杆机构是在曲柄滑块机构中将曲柄作为机架演化而来的,将曲柄的连续回转运动转化为导杆的往复摆动,故称为摆动导杆机构。摆动导杆机构在牛头刨床、插床、低频振动攻丝机和缆线爬行机器人[1-3]等机构中得到了广泛的应用,对其运动参数进行分析研究,对于优化设计摆动导杆机构,提高工作效率具有重要意义。该文研究了摆动导杆机构的急回特性及影响因素,应用ADAMS软件对其进行了运动仿真分析,并应用ZNH-B型连杆机构实验台对运动参数的合理性进行了实验验证。
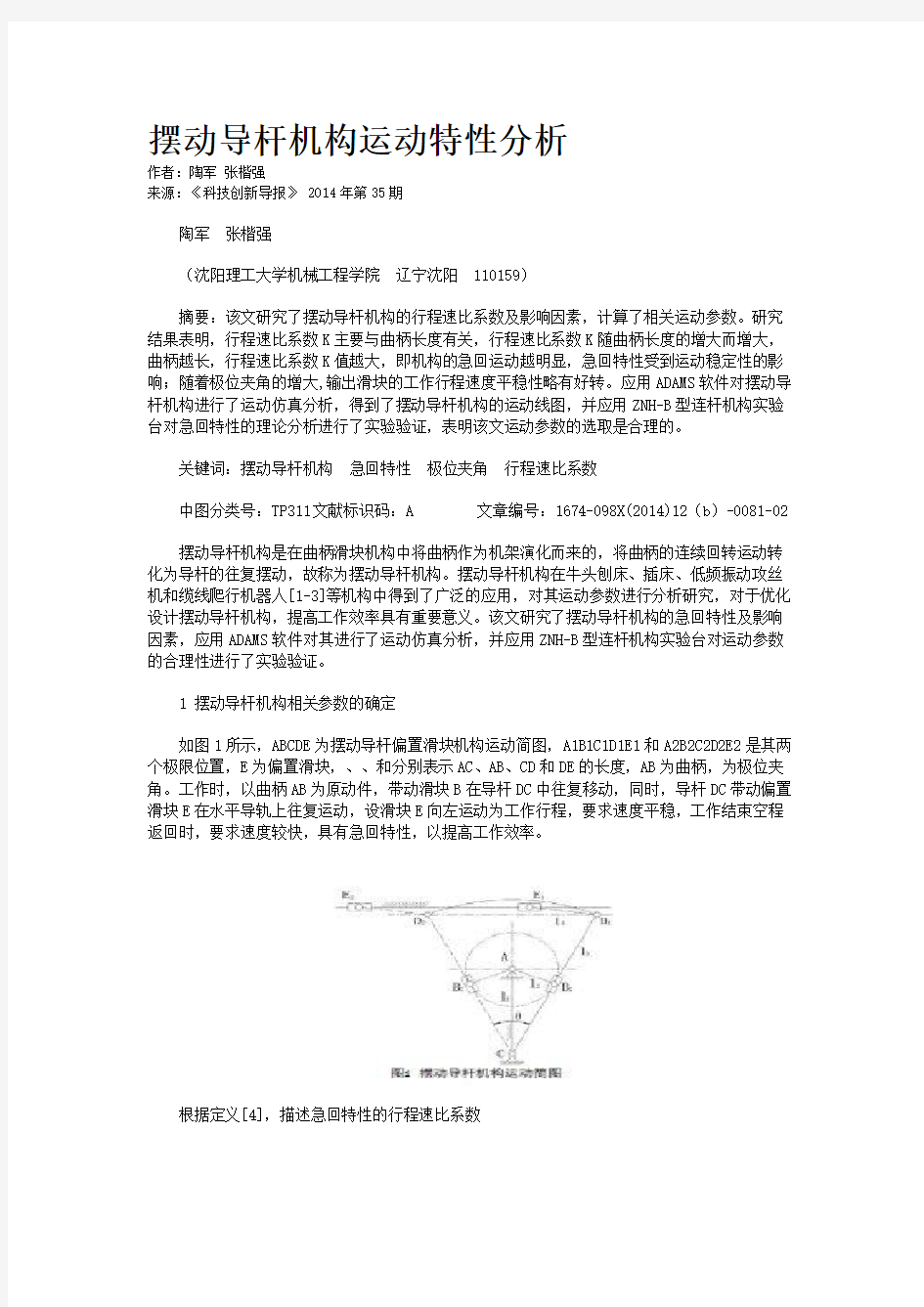
1 摆动导杆机构相关参数的确定