大内高手--调试手段及原理
- 格式:doc
- 大小:704.50 KB
- 文档页数:67
嵌入式调试的方法嵌入式调试是指在嵌入式系统开发过程中,通过调试工具和方法对嵌入式系统进行故障定位和问题解决的过程。
嵌入式系统通常具有实时性、硬件资源受限、系统闭合性等特点,因此嵌入式调试需要特殊的方法和工具来进行。
下面将介绍几种常见的嵌入式调试方法。
1. 仿真调试法仿真调试是指在嵌入式系统开发过程中,利用仿真工具对系统进行软件调试和验证。
仿真工具可以模拟目标硬件的运行环境,使开发人员可以在计算机上进行调试。
通过仿真调试,开发人员可以在不依赖目标硬件的情况下进行软件调试,提高调试效率和便捷性。
2. 调试工具法调试工具是嵌入式系统调试的关键。
常见的调试工具包括调试器、示波器、逻辑分析仪等。
调试器可以连接到目标硬件上,通过调试接口与目标系统通信,实现对目标系统的软件调试。
示波器和逻辑分析仪可以用来观测目标系统的电信号和逻辑信号,帮助开发人员分析系统运行状态和故障原因。
3. 调试信息输出法在嵌入式系统开发过程中,开发人员可以在代码中插入调试信息输出语句,将系统运行时的状态信息输出到调试端口或者日志文件中。
通过观察调试信息,开发人员可以了解系统的运行状态和问题所在。
4. 调试工具辅助法调试工具辅助法是指利用辅助工具来辅助嵌入式系统的调试。
常见的辅助工具包括追踪分析工具、覆盖率工具、性能分析工具等。
这些辅助工具可以帮助开发人员分析系统的执行路径、代码覆盖情况、系统性能等,从而帮助开发人员定位和解决系统故障。
5. 调试打印法调试打印法是指在程序中插入打印语句,输出程序执行过程中的状态信息。
通过观察打印输出,开发人员可以了解程序的执行路径、变量取值等信息,帮助定位和解决问题。
除了上述几种常见的嵌入式调试方法外,还有一些特定的调试技术和方法,比如JTAG调试、RTOS调试、硬件调试等。
总的来说,嵌入式调试是一个复杂而有挑战性的工作,需要开发人员熟练掌握各种调试工具和方法,同时具备较强的分析和解决问题的能力。
随着嵌入式系统的复杂性不断增加,嵌入式调试也将面临更多的挑战和机遇。
有效的调试技巧调试是在软件开发和故障排除过程中不可或缺的一项技能。
通过调试,我们可以找出程序中的错误并进行修复,以确保程序的正常运行。
本文将介绍一些有效的调试技巧,帮助开发人员更快地定位和解决问题。
一、理解问题在开始调试之前,首先要对问题有一个清晰的理解。
这包括了对问题产生的原因、出错的地方以及预期的结果等方面的了解。
通过仔细阅读错误日志、查看代码和与用户进行沟通,可以更好地理解问题的本质,从而更有针对性地进行调试工作。
二、使用日志记录日志记录是调试过程中非常有用的工具。
通过在代码中插入日志语句,可以实时跟踪程序的执行流程和变量的取值。
在调试时,我们可以通过查看日志来分析代码的执行路径,定位错误发生的位置。
同时,日志还可以帮助我们了解代码中的特定操作是否成功执行,以及函数的输入和输出等重要信息。
三、逐步调试逐步调试是一种常用的调试方法。
它通过在程序中设置断点,使程序在特定的位置暂停执行,然后逐行或逐个函数地查看代码的执行情况。
在每个断点处,我们可以检查变量的值、观察程序的状态,并逐步验证代码的正确性。
通过逐步调试,我们可以准确地追踪代码的执行路径,找出错误的根源。
四、利用调试工具调试工具是调试过程中的得力助手。
现代的集成开发环境(IDE)通常配备了强大的调试功能,如断点设置、变量监视、调用堆栈等。
通过这些调试工具,我们可以更方便地观察程序状态、检查变量值,并可以在错误发生时实时定位问题。
五、创建单元测试单元测试是一种有效的调试技巧之一。
通过创建针对特定函数或模块的单元测试,我们可以在运行前先验证代码的正确性。
单元测试可以模拟各种输入和操作情况,验证代码的不同分支和边界条件的正确性。
当测试失败时,我们可以根据错误信息快速定位到问题所在,并进行修复。
六、查阅文档和资源在调试过程中,如果遇到了一些特定的问题或者技术难题,查阅相关的文档和资源是一个不错的选择。
这些文档和资源提供了关于编程语言、开发框架或库的详细信息和教程。
嵌入式系统调试方法
嵌入式系统调试方法可以根据不同的调试目标和调试需求采用不同的方法。
以下列举了一些常见的嵌入式系统调试方法:
1. 基于软件的调试方法:
- 使用断点:在代码中插入断点,停止程序运行并观察变量值,跟踪程序执行流程。
- 打印调试信息:通过在代码中插入打印语句,将程序的状态信息打印输出到终端或日志文件中。
- 使用调试工具:使用专业的调试工具,如GDB、JTAG等,通过连接到嵌入式系统的调试接口,对系统进行调试和观察。
2. 基于硬件的调试方法:
- 使用示波器:通过连接示波器到嵌入式系统的输入输出接口,观察信号波形,以了解系统在运行时的状态和行为。
- 使用逻辑分析仪:通过连接逻辑分析仪到嵌入式系统的总线上,可以观察和分析总线通信、时序等情况。
- 使用仿真器/调试器:通过连接仿真器/调试器到嵌入式系统的调试接口,可以对系统进行单步调试、观察内存和寄存器状态等。
3. 试错法和排除法:
- 通过对系统的部分功能进行临时修改或替换,以确认问题所在。
- 逐步排除可能的原因,通过修改代码或配置参数,逐步缩小问题范围。
4. 远程调试方法:
- 使用远程调试工具:通过网络连接,将调试信息传输到远程电脑进行调试。
- 使用远程监控系统:通过网络连接,远程监控嵌入式系统的运行状态,收集和分析系统的日志和运行数据。
综合使用上述方法,可以帮助开发人员在嵌入式系统开发过程中有效地定位和解决问题。
交叉调试原理交叉调试(Cross Debugging)是一种在开发过程中常用的技术,主要用于调试在目标硬件或操作系统上运行的程序。
通过交叉调试,开发人员可以在不同的环境(例如,主机和目标系统)之间传输调试信息,从而在开发过程中定位和修复错误。
以下是交叉调试的基本原理和重要概念的详细解释。
一、交叉调试的原理交叉调试的基本原理是利用调试代理(Debugger Agent)在主机和目标系统之间传输调试信息。
调试代理通常是一个运行在目标系统上的小程序,它负责与主机上的调试器通信,将调试器的控制流和数据流传递给目标系统。
通过这种方式,开发人员可以在主机上控制目标系统的执行流程,设置断点、查看内存、单步执行等,从而找出程序中的错误。
二、交叉调试的过程交叉调试的过程通常包括以下几个步骤:1. 连接目标系统:开发人员需要将主机与目标系统连接起来,以便于进行数据传输和控制。
这可以通过串口、网络、JTAG等方式实现。
2. 启动调试代理:在目标系统上运行调试代理,以便于接收主机上的调试器发出的指令。
3. 启动调试器:在主机上启动调试器,并与目标系统建立通信。
此时,调试器将可以控制目标系统的执行流程。
4. 设置断点:在需要调试的代码行设置断点,以便于在执行到该行代码时停止程序的执行。
5. 开始调试:当程序运行到断点处时,调试器将接管控制权,并将当前执行上下文(包括程序计数器、寄存器、内存等)传输到主机上。
此时,开发人员可以在主机上查看和修改变量的值、单步执行代码等。
6. 结束调试:当开发人员完成调试后,可以停止调试过程,并将控制权交还给目标系统。
此时,程序将继续执行,或者退出调试模式。
三、交叉调试的关键技术交叉调试涉及的关键技术包括:1. 调试协议:用于主机和目标系统之间传输调试信息的协议。
常见的调试协议包括GDB协议(用于串口和网络通信)和JTAG协议(用于硬件调试)。
2. 远程通信:交叉调试需要在主机和目标系统之间进行数据传输和控制。
arm 调试原理在 ARM 调试原理中,调试器是一个重要的工具,用于分析和修复软件中的问题。
下面将介绍一些 ARM 调试的基本原理。
1. 调试接口:ARM 处理器提供了调试接口,允许调试器与处理器进行通信。
这个接口通常是一组寄存器,可以读取和修改处理器的状态。
通过这个接口,调试器可以访问处理器的内部状态,如寄存器、内存和控制寄存器。
2. 断点:调试器可以在程序中设置断点,当程序执行到断点处时会暂停执行。
断点可以在特定的内存地址上设置,也可以在特定的代码行上设置。
调试器通过在断点处修改相关指令,使其在执行时触发中断信号,从而实现断点的功能。
3. 单步执行:调试器可以以单步模式运行程序,即一次执行一条指令。
这样可以逐行查看程序的执行过程,帮助发现代码中的错误。
在单步执行模式下,调试器会将程序指令写入处理器,并监控处理器状态的变化。
4. 远程调试:ARM 调试器通常支持远程调试功能,允许调试器与远程设备进行通信。
通过连接调试器和远程设备之间的通信通道,可以在远程设备上进行调试和分析工作,而不需要将程序和调试器置于同一物理设备上。
5. 观察状态:调试器可以监视处理器的状态并实时显示。
这包括处理器的寄存器值、内部总线状态和外设的状态等。
通过观察处理器的状态,可以更好地了解程序的执行流程和相关变量的值。
6. 回溯调试:调试器通常支持回溯调试功能,允许开发人员在程序中回溯到之前的某个状态,从而重现问题或跟踪错误。
这对于调试复杂的程序尤为重要,可以帮助找到导致错误的具体原因。
总之,ARM 调试原理主要包括调试接口的使用、断点设置、单步执行、远程调试、观察状态和回溯调试。
这些原理为开发人员提供了强大的调试工具,可以帮助他们更快地定位和解决软件中的问题。
摄像机参数调制及拍摄小技巧有人说过最好的教材就是器材的说明书!其实任何的理论和技巧都是建立在娴熟使用机器的基础上的。
所以最重要的还是回归基础。
任何好的片子都是拍出来的!好的视觉传达会给片子增色。
一般的摄像机拍摄手法分为两种,即:外部运动和内部运动。
即镜头调度和场面调度。
以下为总结的一些小技巧小阅历。
与君共勉。
内部调整所谓的摄像机内部运动指的是被摄物体在镜头内的运动和摄像机采用自身的焦距、景深及快门速度的所协作带来的视觉效果。
换而言之指的是场面调度和拍摄手法。
在日常工作中我们很少涉及场面调度的艺术性制造,所以在这里主要还是重点说一下拍摄手法。
一般的摄像机内部运动有两种种,变焦、对焦、曝光变焦变焦指的是变化焦距。
在日常的拍摄中常常会用到的•种拍摄手法,其最终目的是呈现不同景别不同视角给人带来的不同感受,能凸显人物,能交代环境。
谈到变焦必定会谈到景别。
景别是指由于摄影机与被摄体的距离不同,而造成被摄体在电影画面中所呈现出的范围大小的区分。
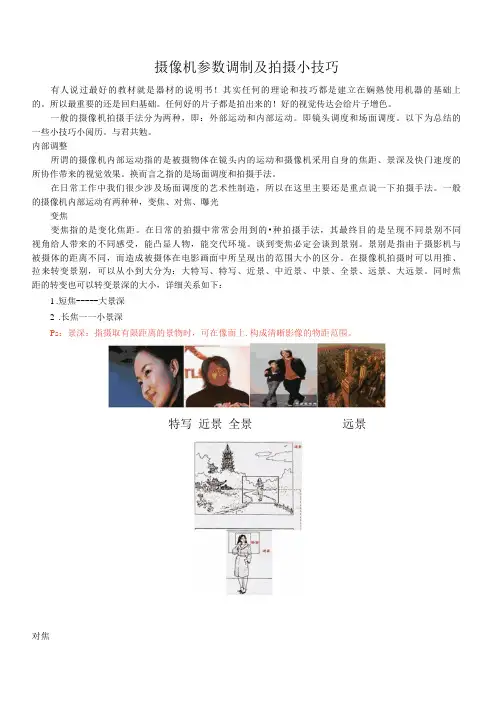
在摄像机拍摄时可以用推、拉来转变景别,可以从小到大分为:大特写、特写、近景、中近景、中景、全景、远景、大远景。
同时焦距的转变也可以转变景深的大小,详细关系如下:1.短焦-----大景深2.长焦一一小景深Ps:景深:指摄取有限距离的景物时,可在像面上.构成清晰影像的物距范围。
特写近景全景远景对焦对焦指的是调整焦点的位置以达到自己想要的特别影像效果,是•种极为常见的镜头语言,可以凸显主体,可以引导人们的视觉重点。
对焦可以分为自动对焦和手动对焦两种。
在不同的环境中需要用不同的对焦方式。
自动对焦顾名思义指的是摄像机自身所自带的对焦系统,每一台摄像机都会有这样的功能,在拍摄时会自动依据被摄物体的位置调整焦点位置,较为便利。
但是有时候为了达到特定的视觉效果自动对焦就有了它自身的局限性。
我们知道摄像机的自动对焦会有肯定的区域(如下图1,没有找到摄像机的寻像器,就找了张相机的对焦屏,道理是一样的),摄像机会依据区域范围内的物体变化而变化焦点位置,在拍摄时常常会有跑焦的现象。
arm jtag 调试原理嗨,小伙伴!今天咱们来唠唠ARM JTAG调试原理这个超有趣的事儿。
JTAG呢,就像是给ARM芯片开的一个特殊小后门。
想象一下,ARM芯片就像一个神秘的小城堡,里面有好多好多的小房间(各种寄存器、功能模块啥的),但是这个城堡外面围着高高的城墙,我们平常很难直接看到里面到底发生了什么。
这时候JTAG 就闪亮登场啦。
JTAG有几个特别的线,就像是几根魔法绳索。
其中有TMS(测试模式选择)线,这根线就像是一个指挥棒。
你看啊,当我们在调试的时候,通过在这根线上发送不同的高低电平信号,就像是在给芯片里的调试模块打暗号呢。
比如说,高电平可能表示“咱们要进入这个特定的测试模式啦”,低电平可能就是“现在先停一停这个操作”。
还有TCK(测试时钟)线,这可是整个调试的节奏大师哦。
它就像一个小鼓手,不停地打着节拍。
芯片里的调试操作都得按照这个节拍来进行。
就像我们跳舞得跟着音乐的节奏一样,芯片里的各种测试和数据传输都要和TCK的节奏同步。
如果TCK这个小鼓手乱了节奏,那整个调试可就乱套啦,就像一群舞者突然找不到音乐的节奏,乱成一锅粥了呢。
TDI(测试数据输入)线呢,这是往芯片里送宝贝(数据)的通道。
我们想要查看芯片里某个寄存器的值,或者给某个模块设置一个初始状态,就可以通过TDI把这些数据送进去。
这就好比我们通过一个小管道,把我们想要的东西送进城堡里的各个小房间。
而TDO(测试数据输出)线呢,它是把芯片里的信息反馈出来的通道。
就像是城堡里的小信使,把城堡里各个房间的情况给我们带出来。
比如说我们想知道某个寄存器现在存的是什么数,芯片就会通过TDO把这个数给我们送出来,就像小信使把房间里的小纸条递给我们一样。
那这个JTAG到底是怎么在ARM芯片里工作的呢?当我们把JTAG接口连接到ARM 芯片上,就相当于把我们的魔法绳索系到了城堡上。
然后我们通过外部的调试工具,像是JTAG调试器之类的。
这个调试器就像是一个超级管家,它知道怎么摆弄那些魔法绳索。
windbg 内核调试原理
Windbg是一款被广泛使用的Microsoft提供的调试工具,它可以用于用户模式和内核模式的调试。
对于内核调试,主要涉及到以下几个原理:
1. 内核调试器:Windbg作为内核调试器,可以通过与目标计算机建立串行连接、FireWire连接、USB连接或通过网络连接,在目标计算机上进行内核级别的调试。
2. 内核调试目标:通过设置目标计算机上的调试标记(即启用调试模式),可以将目标计算机变成一个调试目标。
调试目标将在启动过程中显示调试器的连接请求,并接受调试器的控制和命令。
3. 调试插入点:在目标计算机的启动过程中,调试器可以设置各种调试插入点,例如断点、条件断点和行程断点。
这些断点可以帮助调试器在运行过程中捕捉特定的事件和操作,从而进行调试。
4. 调试命令和符号:在内核调试过程中,使用Windbg可以通过命令行界面输入各种调试命令,包括查看内存、寄存器、线程状态等信息。
此外,Windbg 还支持符号调试,可以解析并显示代码的符号信息。
5. 内核调试数据:在内核调试过程中,Windbg可以获取目标计算机的内核状态信息,包括内存映像、寄存器状态、线程状态、堆栈跟踪等。
这些数据可以帮
助调试器找出内核中的问题和错误。
总之,Windbg通过内核调试器与目标计算机建立连接,并使用调试命令和符号解析来获取并分析内核调试数据,从而帮助用户调试和分析内核模块的问题。
编程黑客技巧掌握高级调试与错误处理方法在现代科技日益发展的今天,计算机编程已经成为了一项不可或缺的技能。
作为一个程序员,掌握高级调试与错误处理方法是至关重要的。
本文将介绍一些编程黑客技巧,帮助读者提高调试能力并有效处理错误。
一、调试技巧1. 使用调试器:调试器是程序员的得力助手,通过在代码中设置断点(breakpoint),可以逐行执行代码,帮助定位问题所在。
常用的调试器有GDB(GNU调试器)和VSCode。
在编写代码时,可以在关键位置设置断点,并使用调试器逐步跟踪程序执行过程,以便找到错误。
2. 打印调试信息:在代码中合理添加打印语句可以帮助发现问题。
通过输出变量值、函数调用信息等,可以更好地理解代码执行情况,并快速定位错误。
要注意在调试完成后及时删除或注释掉这些调试信息,以免影响代码的性能和可读性。
3. 使用日志工具:将程序运行过程中的关键信息记录到日志文件中,可以帮助追踪问题。
在代码中使用日志工具,可以灵活地设置日志级别和输出内容,方便调试和错误处理。
常用的日志库有Log4j和Logback。
二、错误处理方法1. 异常处理:异常是在程序运行时出现的错误或异常情况,合理地处理异常可以保证代码的健壮性。
在代码中,使用try-catch语句捕获并处理可能抛出的异常,以避免程序崩溃。
同时,根据不同的异常类型选择合适的处理方法,如输出错误信息、进行重试、回滚事务等。
2. 错误码和错误信息:在程序中定义一套错误码和对应的错误信息,可以更清晰地描述错误的类型和原因。
当程序出现错误时,通过错误码可以迅速了解错误的性质,并根据错误信息进行相应的处理。
此外,错误码和错误信息也对于用户友好的错误提示非常有帮助。
3. 容错设计:通过合理的容错设计,可以增强程序的稳定性和可靠性。
例如,在网络编程中,可以使用重试机制来处理因网络异常导致的数据传输失败。
在文件操作中,可以进行事务管理,确保相关操作的原子性,避免数据损坏。
调试设备的工作原理是
调试设备的工作原理可以总结为以下几步:
1. 连接设备:首先,将调试设备与目标设备(需要调试或测试的设备)进行物理连接,常见的连接方式包括通过USB、串口、以太网等。
2. 调试软件与目标设备通信:调试设备通过连接方式与目标设备建立通信通道,实现调试软件与目标设备之间的数据交换。
3. 读取目标设备信息:调试设备使用合适的通信协议读取目标设备上的信息,如寄存器状态、存储器数据、传感器数据等。
4. 修改目标设备状态:调试设备可以通过通信协议修改目标设备的状态,如修改寄存器的值、写入特定数据等。
这样可以测试设备在不同状态下的行为。
5. 调试工具功能:调试设备通常提供一系列的功能,如单步执行、断点设置、变量监视等,以帮助开发人员进行调试和测试。
总的来说,调试设备的工作原理是通过与目标设备建立通信通道,读取和修改目标设备的状态,实现对目标设备的调试和测试。
单片机调试原理单片机是指一种集成了CPU、存储器和输入/输出设备等基本功能的微型计算机系统。
其实,单片机调试就是对单片机系统进行熟悉、测试并发现修正问题的过程。
下面,就来详细介绍一下单片机调试的原理及其步骤。
首先,单片机调试需要我们对单片机系统有一定的了解和熟悉。
这包括对芯片型号和规格、指令系统和调试工具的基本操作等方面的了解。
在这里,我们需要注意两点。
一是芯片型号要与指令系统基本匹配;另一方面,调试工具的功能要包含必要的调试需求,比如实时监测程序执行状态、查看变量取值、读取器件内部寄存器状态等。
其次,单片机调试需要现场调试。
即,在实际运行设备的过程中,我们根据实际场景来调试单片机程序。
这就要求我们具有一定的工程经验和项目实战能力。
在初期设计和编程时,要尽量考虑到实际运行情况,并在调试的过程中根据现场实际情况进行不断地修改和优化。
接下来,单片机调试也需要芯片板的支持。
这意味着,我们应该用质量可靠的芯片和板,以保障设备的稳定性和长期性能。
一些主流的芯片板,比如Arduino、Raspberry Pi、STM32等均提供相应的调试工具和开发环境。
我们可以根据自己的项目需求来选择相应的芯片板和调试工具,以达到最佳的调试效果。
最后,单片机调试需要我们具有一定的耐心和细致的态度。
单品机调试过程中,问题可能比预想中更加复杂,需要我们有耐心进行诊断分析。
同时,单片机调试也需要我们对一些关键的细节有足够的重视。
比如,对端口的输入输出状态以及对指令系统的熟悉程度等方面要特别地留意。
总之,单片机调试是一个非常复杂的过程。
只有我们具有足够的专业技能和科学态度,并全力以赴地进行调试,才能在项目中实现最佳的化现实。
电容调高原理哎呀,说起电容调高原理,这可真是个技术活儿,不过别担心,我尽量用大白话给你娓娓道来。
记得有一次,我在家里捣鼓我的老式收音机,这玩意儿可真是古董了,但声音那叫一个纯正。
不过呢,这收音机有个毛病,音量总是不够大,调到最大也跟蚊子哼哼似的。
我心想,这可不行,得给它调调。
首先,我得搞清楚这音量小的原因。
我上网搜了搜,发现可能是电容的问题。
电容,你知道吧,就是那种能储存电的元件,它在电路里就像个调节器,控制着电流的流动。
音量小,可能是因为电容老化,或者容量不够。
我决定动手试试。
首先,我得找到那个电容。
收音机里面密密麻麻的都是电子元件,找电容可不容易。
我得小心翼翼地把收音机拆开,生怕弄坏了哪个小零件。
终于,在一堆线路板和电阻之间,我找到了那个小小的电容。
接下来,我得测量一下它的容量。
我拿出我的万用表,小心翼翼地把探针接触到电容的两个引脚。
万用表上的数字跳了几下,最后稳定在一个数值上。
我一看,果然,容量比标称的要小很多。
既然找到了问题,那就得解决它。
我决定换个新的电容。
我在网上搜了搜,找到了一个容量更大的电容。
新电容到手后,我小心翼翼地把它焊接到电路板上。
焊接这活儿可真不容易,得控制好温度,不然电容就废了。
换好电容后,我把收音机重新组装起来。
我按下开关,调到最大音量,哇,这声音,简直就像换了个新收音机一样。
我心想,这电容调高原理,还真是神奇。
你看,这就是电容调高原理的一个真实例子。
虽然听起来挺复杂的,但其实只要你细心观察,动手实践,就能发现其中的奥秘。
就像我这次修收音机一样,虽然过程有点繁琐,但最后听到那清晰响亮的声音,感觉一切都值了。
所以啊,别小看了这些小小的电子元件,它们可是电路里的大英雄呢。
下次你的设备音量不够大,说不定就是电容在捣鬼,记得检查一下哦。
嵌入式系统中的调试技术与实用工具介绍在嵌入式系统开发过程中,调试是一项关键的技术。
通过调试,开发人员可以验证系统的正确性,解决问题并改进系统性能。
为了提高调试效率,开发人员需要掌握各种调试技术和使用实用工具。
本文将介绍嵌入式系统中常用的调试技术和实用工具,以帮助读者更好地理解和应用于嵌入式系统开发中。
一、调试技术介绍1. 储存器映射在嵌入式系统中,调试通常需要直接与硬件交互以获取系统状态和变量值。
其中,储存器映射是一种常见的调试技术。
通过访问特定的储存器地址,开发人员可以读取或写入相关的数据。
2. 调试模式调试模式是嵌入式系统中的一种常用调试技术。
通过将系统设置为调试模式,开发人员可以获取更多的调试信息和系统状态。
调试模式可以通过硬件或软件方式实现,提供了更详细的错误信息和调试功能。
3. 仿真调试仿真调试是一种通过软件模拟硬件运行的调试技术。
通过仿真调试工具,开发人员可以在软件环境中进行系统调试,模拟系统运行过程并调试问题。
仿真调试可以提高调试效率,减少硬件依赖性。
4. 串口调试串口调试是嵌入式系统中一种常见的调试技术。
通过串口,开发人员可以与系统进行通信并通过串口接收和发送调试信息。
串口调试一般使用命令行界面或者调试工具进行。
二、实用工具介绍1. 编译器编译器是嵌入式系统开发中必备的工具之一。
通过编译器,开发人员可以将高级语言代码转换为机器语言,生成可执行文件。
编译器还可以帮助开发人员优化代码,提高系统性能。
2. 调试器调试器是一种用于调试嵌入式系统的实用工具。
通过调试器,开发人员可以在系统运行过程中暂停执行、查看寄存器状态、变量值和调用堆栈等信息。
调试器通常与开发板或仿真器配合使用,提供更方便的调试功能。
3. 调试探针调试探针是一种用于连接目标系统和调试工具的实用工具。
通过调试探针,开发人员可以将调试工具与目标系统相连,并进行调试操作。
调试探针通常支持多种接口,如JTAG、SWD等,可根据系统需求选择合适的探针。
自动化设备调试指南高级工程师的实用技能秘籍引言:在现代工业领域,自动化设备的调试是确保设备正常运行和生产高质量产品的关键环节。
作为一名高级工程师,具备熟练的调试技能对于提高工作效率和保障产品质量至关重要。
本文将分享一些实用的技能秘籍,帮助高级工程师在自动化设备调试过程中更加游刃有余。
一、掌握设备原理与技术知识作为一名高级工程师,对于自动化设备的原理和技术特点有深入的了解是必不可少的。
首先,要熟悉设备的工作原理、结构与部件,明确了解各个组成部分的功能和相互关系。
其次,学习掌握相关的控制原理和技术,比如PLC、传感器、执行器等。
只有对设备有深入的了解,才能在调试过程中准确判断问题所在并解决。
二、熟练使用调试工具在自动化设备调试中,熟练使用各种调试工具可以事半功倍。
首先,掌握使用示波器、测量仪器等电子设备调试电路板和控制系统。
其次,学习使用专业软件进行PLC编程和参数调整等操作。
此外,了解各种传感器和执行器的调试方法,能够准确读取和解析设备产生的信号是非常重要的。
三、合理规划调试流程合理规划调试流程是高级工程师必备的技能之一。
在开始调试前,要对设备进行全面的检查和确保每个部分都工作正常。
然后,从功能调试入手,一步步对设备的各项功能进行测试和调整。
在调试中,要做好记录工作,确保每一步的调试结果都有记录以供参考。
同时,及时与相关人员进行沟通和协调,确保工作的顺利进行。
四、善于分析问题与解决方案在调试过程中,难免会遇到各种各样的问题。
作为高级工程师,善于分析问题和找出解决方案是关键所在。
首先,要通过观察和收集数据,确定问题的发生原因。
然后,根据问题的性质和设备的特点找出解决方案,并进行验证和调整。
在解决问题的过程中,要注重细节,耐心细致地排查每个可能的原因,直到问题得以解决。
五、主动学习与不断提升高级工程师不仅要掌握基础知识和技能,还要不断学习和提升自己。
首先,要关注自动化设备行业的最新发展动态,了解新技术和新产品的应用。
自动化调试技巧随着科技的发展,自动化调试技术在各个领域得到了广泛应用。
它的出现极大地提高了调试的效率和准确性,使问题的定位和解决变得更加方便和快捷。
在本文中,我将介绍一些常用的自动化调试技巧,帮助读者更好地应用于实际工作中。
一、日志调试技巧日志是调试过程中常用的一种工具。
通过在代码中添加打印日志的语句,可以将程序执行过程中的关键信息输出到文件或控制台中,便于追踪和分析问题。
在使用日志进行调试时,有几个注意事项需要遵循:1. 适当地添加日志输出语句,避免无用的输出影响程序执行效率。
2. 使用合适级别的日志,根据调试的需要选择输出详细还是简略的信息。
3. 对于大型项目,可以根据模块或功能点划分日志文件,方便问题的定位和分析。
二、断点调试技巧断点调试是一种常用的调试方法,通过在代码中设置断点,程序执行到断点时将暂停执行,可以逐行查看程序的执行过程,观察变量的值,找到问题所在。
以下是一些断点调试的技巧:1. 针对问题进行有目的性的断点设置,避免全部代码都设置断点,提高调试效率。
2. 使用条件断点,在满足特定条件时中断程序执行,以便更准确地定位问题。
3. 结合调试器的单步调试功能,逐行执行查看变量的值,帮助分析问题。
三、性能调试技巧性能是软件开发和调试中一个重要的指标。
通过性能调试,我们可以找到程序中的性能瓶颈,进行优化和提升。
以下是一些性能调试的技巧:1. 使用性能分析工具,例如Profiling工具,可以记录程序执行过程中的函数调用和时间开销,进而找到性能瓶颈。
2. 对于需要大量数据处理的程序,可以优化算法和数据结构,减少不必要的计算和内存开销。
3. 对于并发程序,可以使用并发调试工具,检测并解决线程安全和多线程竞争问题。
四、单元测试技巧单元测试是软件开发中的一环,也是自动化调试的重要组成部分。
通过编写单元测试用例,可以快速、准确地发现代码中的问题。
以下是一些单元测试的技巧:1. 编写全面的单元测试用例,覆盖各个代码路径,包括正常执行路径和异常处理路径。
debugging调试原理调试是软件开发过程中必不可少的环节。
在开发过程中,我们经常会遇到各种问题,如程序崩溃、逻辑错误、性能问题等。
调试的目的就是要找出这些问题的原因并解决它们。
调试的原理可以概括为以下几个步骤:定位问题、重现问题、分析问题、修复问题和验证修复。
下面我将详细介绍每个步骤。
1. 定位问题:当我们遇到问题时,首先要明确问题的具体表现和出现的环境。
通过观察日志、错误信息或用户反馈,我们可以初步定位问题所在的模块或代码段。
2. 重现问题:在定位问题的基础上,我们需要尽可能地重现问题。
这可以通过提供特定的输入数据、模拟特定的条件或使用调试工具来实现。
重现问题有助于我们更加准确地分析问题。
3. 分析问题:在重现问题后,我们需要对问题进行进一步分析。
这包括查看代码、变量的值、函数的调用栈等。
在这个过程中,我们可以使用调试工具来单步执行代码、观察变量的值以及跟踪函数的调用过程。
通过分析问题,我们可以找出问题的具体原因。
4. 修复问题:在分析问题后,我们可以确定问题的原因并进行修复。
修复问题可能包括修改代码、更新依赖库、调整配置等。
在进行修复之前,我们可以先尝试一些简单的修复方法,如修改参数、增加日志输出等。
如果问题比较复杂,我们可能需要进行更深入的修改。
5. 验证修复:在修复问题后,我们需要验证修复是否成功。
这可以通过重新运行程序、重现问题或运行自动化测试来实现。
如果问题已经解决,那么我们可以确认修复成功。
否则,我们需要重新回到分析问题的步骤,找出修复失败的原因。
调试的过程中,还有一些常用的技巧和方法可以帮助我们更高效地解决问题:- 使用日志:在代码中添加适当的日志输出可以帮助我们定位问题、分析问题以及验证修复。
日志可以记录关键变量的值、函数的调用过程、代码执行的路径等信息。
- 使用断点:在调试过程中,我们可以在代码中设置断点。
当程序执行到断点处时,程序会暂停执行,我们可以观察变量的值、查看调用栈等信息。
乒乓技术教程:解析高手的调与控王皓正手抽拉可晨立乒乓time 2014-09-18真正顶尖的高手在比赛中的调控能力都非常强,对于千奇百怪的来球,他们能随心所欲地通过自己的理解进行极其细微的调节,并加以控制。
下面小编将为大家带来国手在比赛中通过手法的细微调控抢得先机的技战术解析。
这是王牿和闰安的比赛,场上比分十分焦灼,决胜局王皓9:8领先。
王皓发到闫安的反手位短球,闰安出手时加了保险,把球拉得非常薄,回球较高,速度很慢,但旋转非常强,王皓抓住机会果断进行了一板反拉,直接得分。
正手从右向左横扫反拉这板反拉非常过瘾,击球动作看上去有些独特,可以说它是“抽”,也可以说它是“扫”,甚至还可以称它为“卷”。
王皓的这板动作看上去很随意,但击球却非常合理,注重了细节。
空制。
他在反拉时选择了下降点,因为此时来球的旋转已经减弱了,便于王皓进行反拉。
拉这板球的手上动作是最核心的技术,王皓手臂的发力方向是从右向左横扫的,主要通过手臂快速收缩制造出的力量抵消来球旋转,同时,他在触球时还通过手指和手腕的细微调节对来球旋转加以控制,制造弧线,这样才能把球的旋转压住并拉回对方球台上。
虽然这板球是在腿不到位的情况下完成的。
王皓的腿和腰依然在击砖时起到了一定的作用。
王皓通过原地转腰为反拉让出了足够的加力一间,腰部带动手臂进行转动,增加了动作的稳定性。
击球瞬间前、后的动作,除了腿上惯性的移动外,王皓在击球时身体还处于一个非常稳定的状态。
这板反拉除了势大力沉以外,落点也很刁钻,随着王皓动作发力的方向,球在落台后还有一定的侧拐,加大了回球的角度。
如何应对高吊弧圈对于旋转强烈的高吊弧圈球,处理时应尽量避免在旋转最强的时候接触球:一种方式就是在球刚落台后,调节好板形快速对球进行封堵,这时球的旋转还没有释放出采借转一压就能把球防回去,但需要尽量避免压球的正面,要从球的侧面,也就是球旋转的甲轴线去“围”球,这个点是旋转最弱的地方。
另一种方式就像王皓一样,等球开始下落,旋转慢慢降低的时候,通过大力反拉给与对手更大的冲击。
大内高手--调试手段及原理知其然也知其所以然,是我们《大内高手》系列一贯做法,本文亦是如此。
这里我不打算讲解如何使用boundschecker、purify、valgrind或者gdb,使用这些工具非常简单,讲解它们只是多此一举。
相反,我们要研究一下这些工具的实现原理。
本文将从应用程序、编译器和调试器三个层次来讲解,在不同的层次,有不同的方法,这些方法有各自己的长处和局限。
了解这些知识,一方面满足一下新手的好奇心,另一方面也可能有用得着的时候。
从应用程序的角度最好的情况是从设计到编码都扎扎实实的,避免把错误引入到程序中来,这才是解决问题的根本之道。
问题在于,理想情况并不存在,现实中存在着大量有内存错误的程序,如果内存错误很容易避免,JA V A/C#的优势将不会那么突出了。
对于内存错误,应用程序自己能做的非常有限。
但由于这类内存错误非常典型,所占比例非常大,所付出的努力与所得的回报相比是非常划算的,仍然值得研究。
前面我们讲了,堆里面的内存是由内存管理器管理的。
从应用程序的角度来看,我们能做到的就是打内存管理器的主意。
其实原理很简单:对付内存泄露。
重载内存管理函数,在分配时,把这块内存的记录到一个链表中,在释放时,从链表中删除吧,在程序退出时,检查链表是否为空,如果不为空,则说明有内存泄露,否则说明没有泄露。
当然,为了查出是哪里的泄露,在链表还要记录是谁分配的,通常记录文件名和行号就行了。
对付内存越界/野指针。
对这两者,我们只能检查一些典型的情况,对其它一些情况无能为力,但效果仍然不错。
其方法如下(源于《Comparing and contrasting the runtime error detection technologies》):l 首尾在加保护边界值HeaderLeading guard(0xFC)User data(0xEB)Tailing guard(0xFC)在内存分配时,内存管理器按如上结构填充分配出来的内存。
其中Header是管理器自己用的,前后各有几个字节的guard数据,它们的值是固定的。
当内存释放时,内存管理器检查这些guard数据是否被修改,如果被修改,说明有写越界。
它的工作机制注定了有它的局限性: 只能检查写越界,不能检查读越界,而且只能检查连续性的写越界,对于跳跃性的写越界无能为力。
l 填充空闲内存空闲内存(0xDD)内存被释放之后,它的内容填充成固定的值。
这样,从指针指向的内存的数据,可以大致判断这个指针是否是野指针。
它同样有它的局限:程序要主动判断才行。
如果野指针指向的内存立即被重新分配了,它又被填充成前面那个结构,这时也无法检查出来。
从编译器的角度boundschecker和purify的实现都可以归于编译器一级。
前者采用一种称为CTI(compile-time instrumentation)的技术。
VC的编译不是要分几个阶段吗?boundschecker在预处理和编译两个阶段之间,对源文件进行修改。
它对所有内存分配释放、内存读写、指针赋值和指针计算等所有内存相关的操作进行分析,并插入自己的代码。
比如:Beforeif (m_hsession) gblHandles->ReleaseUserHandle( m_hsession );if (m_dberr) delete m_dberr;Afterif (m_hsession) {_Insight_stack_call(0);gblHandles->ReleaseUserHandle(m_hsession);_Insight_after_call();}_Insight_ptra_check(1994, (void **) &m_dberr, (void *) m_dberr);if (m_dberr) {_Insight_deletea(1994, (void **) &m_dberr, (void *) m_dberr, 0);delete m_dberr;}Purify则采用一种称为OCI(object code insertion)的技术。
不同的是,它对可执行文件的每条指令进行分析,找出所有内存分配释放、内存读写、指针赋值和指针计算等所有内存相关的操作,用自己的指令代替原始的指令。
boundschecker和purify是商业软件,它们的实现是保密的,甚至拥有专利的,无法对其研究,只能找一些皮毛性的介绍。
无论是CTI还是OCI这样的名称,多少有些神秘感。
其实它们的实现原理并不复杂,通过对valgrind和gcc的bounds checker扩展进行一些粗浅的研究,我们可以知道它们的大致原理。
gcc的bounds checker基本上可以与boundschecker对应起来,都是对源代码进行修改,以达到控制内存操作功能,如malloc/free等内存管理函数、memcpy/strcpy/memset等内存读取函数和指针运算等。
Valgrind则与Purify类似,都是通过对目标代码进行修改,来达到同样的目的。
Valgrind对可执行文件进行修改,所以不需要重新编译程序。
但它并不是在执行前对可执行文件和所有相关的共享库进行一次性修改,而是和应用程序在同一个进程中运行,动态的修改即将执行的下一段代码。
Valgrind是插件式设计的。
Core部分负责对应用程序的整体控制,并把即将修改的代码,转换成一种中间格式,这种格式类似于RISC指令,然后把中间代码传给插件。
插件根据要求对中间代码修改,然后把修改后的结果交给core。
core接下来把修改后的中间代码转换成原始的x86指令,并执行它。
由此可见,无论是boundschecker、purify、gcc的bounds checker,还是Valgrind,修改源代码也罢,修改二进制也罢,都是代码进行修改。
究竟要修改什么,修改成什么样子呢?别急,下面我们就要来介绍:管理所有内存块。
无论是堆、栈还是全局变量,只要有指针引用它,它就被记录到一个全局表中。
记录的信息包括内存块的起始地址和大小等。
要做到这一点并不难:对于在堆里分配的动态内存,可以通过重载内存管理函数来实现。
对于全局变量等静态内存,可以从符号表中得到这些信息。
拦截所有的指针计算。
对于指针进行乘除等运算通常意义不大,最常见运算是对指针加减一个偏移量,如++p、p=p+n、p=a[n]等。
所有这些有意义的指针操作,都要受到检查。
不再是由一条简单的汇编指令来完成,而是由一个函数来完成。
有了以上两点保证,要检查内存错误就非常容易了:比如要检查++p是否有效,首先在全局表中查找p指向的内存块,如果没有找到,说明p是野指针。
如果找到了,再检查p+1是否在这块内存范围内,如果不是,那就是越界访问,否则是正常的了。
怎么样,简单吧,无论是全局内存、堆还是栈,无论是读还是写,无一能够逃过出工具的法眼。
代码赏析(源于tcc):对指针运算进行检查:void *__bound_ptr_add(void *p, int offset){unsigned long addr = (unsigned long)p;BoundEntry *e;#if defined(BOUND_DEBUG)printf("add: 0x%x %d\n", (int)p, offset);#endife = __bound_t1[addr >> (BOUND_T2_BITS + BOUND_T3_BITS)];e = (BoundEntry *)((char *)e +((addr >> (BOUND_T3_BITS - BOUND_E_BITS)) &((BOUND_T2_SIZE - 1) << BOUND_E_BITS)));addr -= e->start;if (addr > e->size) {e = __bound_find_region(e, p);addr = (unsigned long)p - e->start;}addr += offset;if (addr > e->size)return INV ALID_POINTER; /* return an invalid pointer */ return p + offset;}static void __bound_check(const void *p, size_t size){if (size == 0)return;p = __bound_ptr_add((void *)p, size);if (p == INV ALID_POINTER)bound_error("invalid pointer");}重载内存管理函数:void *__bound_malloc(size_t size, const void *caller){void *ptr;/* we allocate one more byte to ensure the regions will be separated by at least one byte. With the glibc malloc, it maybe in fact not necessary */ptr = libc_malloc(size + 1);if (!ptr)return NULL;__bound_new_region(ptr, size);return ptr;}void __bound_free(void *ptr, const void *caller){if (ptr == NULL)return;if (__bound_delete_region(ptr) != 0)bound_error("freeing invalid region");libc_free(ptr);}重载内存操作函数:void *__bound_memcpy(void *dst, const void *src, size_t size){__bound_check(dst, size);__bound_check(src, size);/* check also region overlap */if (src >= dst && src < dst + size)bound_error("overlapping regions in memcpy()");return memcpy(dst, src, size);}从调试器的角度现在有OS的支持,实现一个调试器变得非常简单,至少原理不再神秘。