
案例4.2 PROFIBUS-DP在集装箱桥吊中的应用一、概况
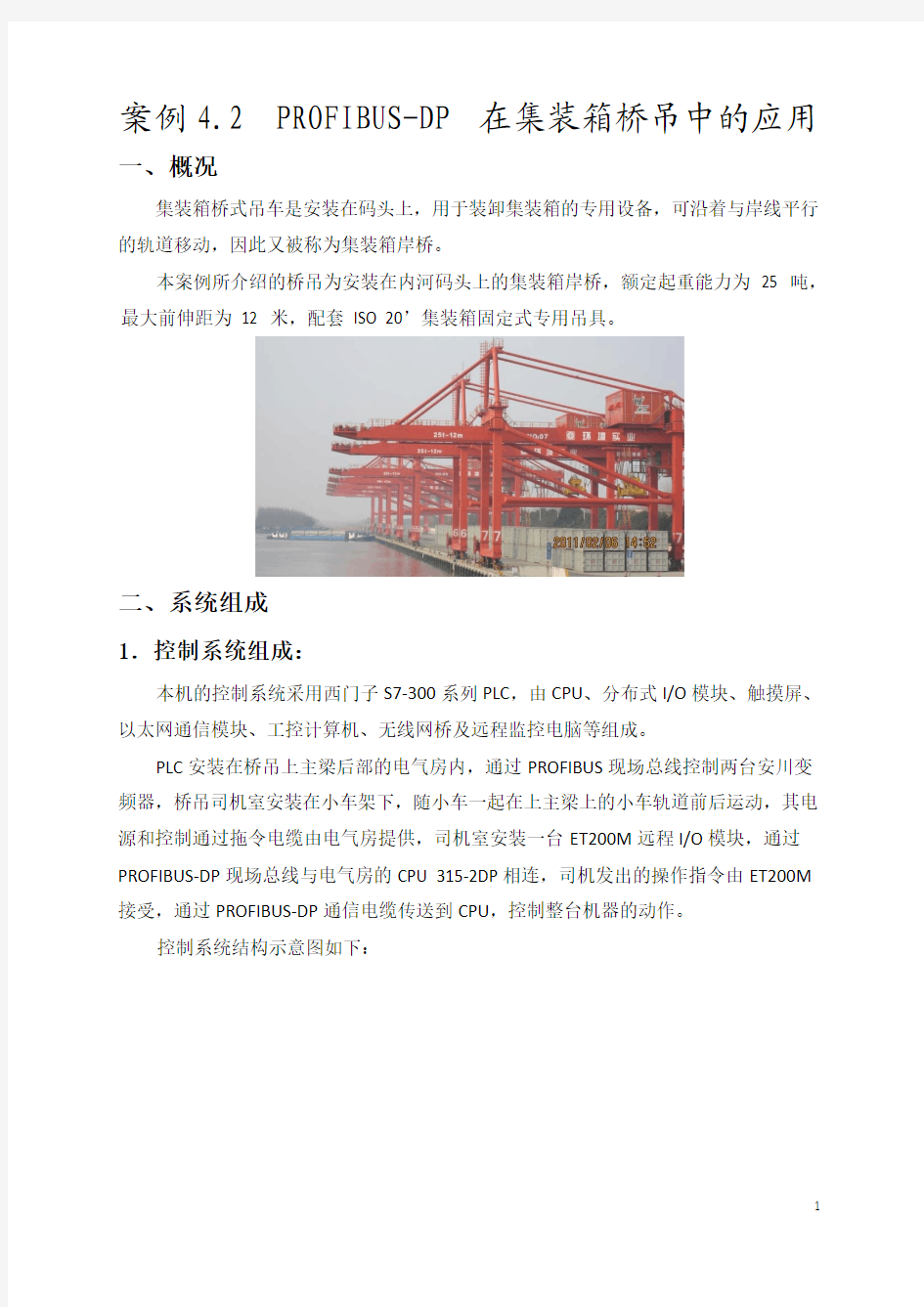
集装箱桥式吊车是安装在码头上,用于装卸集装箱的专用设备,可沿着与岸线平行的轨道移动,因此又被称为集装箱岸桥。
本案例所介绍的桥吊为安装在内河码头上的集装箱岸桥,额定起重能力为25 吨,最大前伸距为12 米,配套ISO 20’集装箱固定式专用吊具。
二、系统组成
1.控制系统组成:
本机的控制系统采用西门子S7-300系列PLC,由CPU、分布式I/O模块、触摸屏、以太网通信模块、工控计算机、无线网桥及远程监控电脑等组成。
PLC安装在桥吊上主梁后部的电气房内,通过PROFIBUS现场总线控制两台安川变频器,桥吊司机室安装在小车架下,随小车一起在上主梁上的小车轨道前后运动,其电源和控制通过拖令电缆由电气房提供,司机室安装一台ET200M远程I/O模块,通过PROFIBUS-DP现场总线与电气房的CPU 315-2DP相连,司机发出的操作指令由ET200M 接受,通过PROFIBUS-DP通信电缆传送到CPU,控制整台机器的动作。
控制系统结构示意图如下:
2.驱动系统组成:
本机的起升机构、大车机构和小车机构均采用交流变频方式驱动,由两台安川YASKAWA变频器驱动。驱动设备参数如下表所示:
起升和小车电动机采用南洋电机厂生产的变频专用电动机,起升电动机为160kW,小车电动机为45kW。
大车使用8台5.5kW的德国SEW带制动器减速电动机并联驱动。大车与小车/起升共用两个变频器中的任意一个。
三、小车驱动控制原理
集装箱桥吊的电控系统要实现对起重机的起升降落、大车及小车的行走、送电、照明、各种保护、检测诊断、监控等多项功能的控制。本案例中仅对小车的驱动控制作一介绍。
1、通过PROFIBUS-DP总线对变频器实现控制
该项目采用一台SIEMENS西门子S7-300的PLC,CPU315-2DP通过PROFIBUS-DP开放式现场总线,控制两台装有SI-P1通信接口卡的YASKAWA安川Varispeed G7变频器。PROFIBUS-DP总线通过拖令电缆连接到桥吊司机室的ET200M,通过其输入模块,接收
司机对各个机构的操作指令。总线末端连接一台SIEMENS西门子触摸屏TKP1000 Basic DP,显示各个机构活动情况,包括起升高度、小车位置,起升小车大车电动机的转速、电流、转矩、各保护限位状态、操作指令、各空气开关闭合情况、各接触器动作情况、故障报警显示等。
其中起升高度、小车位置是由安装在起升电动机和小车电动机轴上的双向光电编码器输送到YASKAWA安川VarispeedG7变频器上安装的PG-B2计数卡,所计脉冲数既作为变频器带PG矢量控制的PG反馈,同时被SI-P1通信接口卡的高速I/O 数据存储映射表通过PROFIBUS-DP总线读到PLC,经过程序运算,得出相应的位置值。
同样起升、小车、大车电动机的转速、电流、转矩等也是由YASKAWA安川VarispeedG7变频器上安装的SI-P1通信接口卡的高速I/O 数据存储映射表通过PROFIBUS-DP总线读到PLC的。
此外PLC还装有ETHERNET模块6GK7 343-1EX21-0XE0 ,通过以太网交换机连接到工控机,工控机安装的组态软件能实时监控设备工作状态,并能记录故障历史和自动输出生产日月报表。以太网交换机连接的无线网桥,能与设备维护人员的远程监控电脑实现无线联网,也能实时监控设备工作状态。
SI-P1 卡备有3种输入输出数据长度(Extended data1 =32 字节、Extended data2 =12 字节、Basic data = 6 字节) 可供选择。本例中选择的是Extended data1,数据长度为32 字节。
输入输出数据的32 字节由以下存储映射表构成。
输出数据中运行操作指令(即控制字)中各位的定义如下表所示:
输入数据中变频器状态(即状态字)中各位的定义如下表所示:
输出数据中的频率指令及输入数据中的电机速度(即速度测量值)均按字为单位传送(含低字节和高字节),速度测量分辨率为1/0.01HZ。
在Extended data1方式的后16个字节为MEMOBUS 信息区域,使用MEMOBUS 信息区域,可进行变频器内的参数设定以及各种监视。一次可写入或读取最多4 个数据。
2、硬件组态及系统功能描述
(1)硬件组态
根据桥吊电控系统所需的各种I/O器件及模块,可对DP站号和I/O地址作出规划,进行统一编址。下表为I/O端口的地址分配:
DP站点地址分配:
主站1(CPU315-2DP) 2
从站1(小车/大车变频器) 3
从站2(起升/大车变频器) 4
从站3(ET200M) 5
主站2(触摸屏) 6
根据I/O分配表及PROFIBUS-DP上各个站的站号安排,可作出项目的硬件组态:
(2)系统功能描述
●变频器的运行
正常情况下,由操作人员在司机室操纵主令手柄(摇杆)来驱动小车。小车电动机启动和停止时所采用的加减速度由变频器控制。
司机推或拉动摇杆手柄发出的正反转与停止命令,由PLC作为控制字中的位写到
SI-P1通信接口卡的高速I/O 数据存储映射表,来控制G7变频器驱动电动机的运行方向和启动、停止。
在司机室中的摇杆手柄上连接有格雷码编码器,司机推或拉动摇杆手柄时,摇杆上格雷码编码器的编码输出发生变化,使得ET200M中配置的32位输入模块上所连接的三个八位格雷码编码器的输入状态发生改变。其中小车摇杆上的格雷码编码器的8位编码输出的地址为I36.0~I36.7。PLC程序将格雷码输入转换成二进制编码,再按G7变频器O1--03中设定的频率单位换算成速度指令,通过SI-P1通信接口卡的高速I/O 数据存储映射表写入变频器,从而控制变频器输出的频率,改变电动机转速。
●正常停车
在操作人员正常操作下释放手柄、机构到达正常停车区域等情况下,系统所采用的
停车方式。减速时间可根据需要设定,制动器在接近零速度时抱闸。
●快速停车
起升重量传感器丢失、大车电缆卷筒故障以及挂舱发生时,系统采取快速停车。利用变频器产生最大的制动转矩来停车。根据制动器抱闸时的速度又分为快速停车#1和#2两种类型。在接近零速时制动器抱闸称为快速停车#1,在速度仍较高时制动器抱闸称为快速停车#2。
●紧急停车
紧停按钮动作时,系统采用紧急停车。系统在关闭所有变频器的同时,制动器抱闸,让运行的机构以最短时间制动。
●安全停车
类似于紧急停车,但系统只是关闭相应的驱动器,同时制动器抱闸。在减速检测故障、通讯故障、极限动作、超速开关动作等情况下,系统采用安全停车。
3、格雷码编码器简述
本项目三个主要工作机构的运行方向指令和速度设定由摇杆控制,安装在司机室
左右操作台上。小车由一具前后动作的摇杆控制;起升和大车由一具十字动作的摇杆控制,前后动作为起升的上升和下降,左右动作为大车的左右运行。每个主要工作机构的
运行,摇杆各提供零位、正向、反向三个无源触点和一个八位的格雷码编码器。
使用编码器作为变频器速度给定时,光电编码器的分辨率为50Hz/N,N=2n,n是输
出字的位数。所以八位的格雷码编码器就能提供256个编码组合。用其作为机构的速度
给定,能方便且较平滑的控制变频器的输出频率,分辨率<0.2Hz,而且控制的错码误差小。
但是,格雷码不能直接实现二进制算术运算,无法直接控制变频器,必须通过程序
转换为二进制。格雷码转换为二进制的运算程序由子程序FC9完成,小车速度控制子程
序FC62通过调用FC9来获得小车的速度给定。
4、程序组成结构:
程序结构图参见下图:
其中功能FC30、FC40、FC60分别是桥吊中起升、大车、小车等3个运动机构的驱动功能子程序。在这3个功能中,又分别调用功能FC32、FC42和FC62。其中FC32是起升速度控制子程序;功能FC42是大车速度控制子程序;功能FC62是小车速度控制子程序。在这3个速度控制子程序中,都调用FC9来实现格雷码转换功能。
5、变频器输出频率给定控制:
主程序MAIN OB1通过调用各功能子程序来控制三个主要工作机构及辅助机构,下图是OB1中的部分有关程序:
OB1 (循环执行主程序):
OB1中,Network 4:CALL "TRAVEL" FC60是调用小车功能子程序,在FC60中又调用小车速度频率功能子程序:CALL "TSPREF" FC62。FC62参见下图:
FC62 (小车速度频率功能):
格雷码转二进制子程序FC9参见下图:
6、小车变频器正反向与停止的控制:
OB1调用小车功能子程序FC60时,在FC60中调用小车速度频率功能子程序FC62之前,先调用了小车命令功能子程序"TCMDS"(FC61)。FC61参见下图:FC61(小车命令功能):
安川G7变频器通讯选择卡SI-P1的输出寄存器第一个字是操作命令字,小车/大车变频器中SI-P1卡的输出寄存器第一个字按硬件组态地址为QW304。其中Q305.0的定义是正转运行/停止命令,Q305.1的定义是反转运行/停止命令。所以PQW304为0时,小车变频器为停止命令;PQW304为1时,小车变频器为正转运行命令;PQW304为2时,小车变频器为反转运行命令。
7、小车位置的计算:
小车电动机后出轴上装有双相增量式编码器,连接到YASKAWA安川VarispeedG7变频器上安装的PG-B2计数卡,供变频器作速度反馈和PLC中位置检测程序使用。
PG-B2计数卡是安川变频器上专门用于连接脉冲编码器并将编码器脉冲信号输入到变频器的接口卡。编码器与PG-B2接口卡的连接如下图所示:
脉冲编码器输出的A、B两相脉冲输入到PG-B2卡,经接口卡中的光电耦合器将计数值送到变频器的存储器,供变频器闭环运行时作为速度反馈信号使用。此外,在PLC 中具体实施位置检测时,使用在变频器中所安装的通讯选择卡SI-P1,可将此速度检测PG计数值通过通信线送到与变频器联网的PLC中供PLC程序使用。
PROFIBUS-DP 通信接口卡SI-P1是将Varispeed 系列变频器连接在开放式现场网络ROFIBUS-DP 上,与PROFIBUS-DP 主站进行数据通信的接口。变频器通过通信接口卡
SI-P1与PLC(DP主站)的连接如下图所示:
字节。其中PIW310是第4个字,其定义为Speed Detection PG count(速度检测脉冲计
数)。
主程序OB1中Network 4:CALL "READ_INV"(FC86)是调用读变频器参数功能子程序,FC86中读取变频器实际运行频率和PG计数值的部分程序见下图:FC86(读变频器):
在小车功能子程序"TRAVEL"FC60中又通过指令CALL "PG_READ","PG_T"(FB83,DB84)调用PG读功能块FB83。调用时将DB12.DBW38赋值于形参#PG_COUNT;M43.4赋值于形参# NUM_ZERO(小车PG_NUMB清零)。FC60中调用FB83的程序段如下:FC60(小车功能):
在功能块FB83中要使用背景数据块DB84,DB84的变量声明表参见下图:
PG读功能块FB83中的程序参见下图:
从FB83"PG_READ"的背景数据块DB84"PG_T"的变量声明表中可知,#COUNT_POS 就是DB84.DBD4,为了直观的得出小车位置的值,还需要对其进行运算。FC60中的Network: 45 CALL "T_POS" , "TPOS_DB" (FB63 / DB63)就是调用小车位置功能子程序块FB63。FB63中的程序如下:
本标准是参照国际标准ISO 2000标准 标准的制定是为规范岸边集装箱桥式起重机的操作和指挥,保证作业安全。 本标准由中国港口协会集装箱分会提出 本标准起草单位:青岛前湾集装箱码头有限责任公司,天津港集装箱码头有限公司 本标准主要起草人:管洪大、钱力、李长军、高长根、沈健 中国港口协会集装箱分会行业推荐标准 ZGXJF-J0003-2009 岸边集装箱桥式起重机安全操作标准 1 范围 本规程规定了岸边集装箱桥式起重机(以下简称桥吊)司机(以下简称司机)和指挥手(分船上指挥手和岸边指挥手)在作业前、作业中、作业后的安全操作及指挥要求。 2 依据标准 GB11602-89《集装箱港口装卸作业安全规程》 GB5082-85 《起重吊运指挥信号》 GB1992-85 《集装箱名词术语》 3作业人员条件与职责 3.1指挥手(未特别注明的均是指对船上和岸边指挥手共同的要求)应具备的条件: a、指挥手须年满18周岁,经身体检查合格,经安全技术培训,由国家指定部门考核合格,取得上岗资格许可证后,方可从事指挥。 b、指挥手应熟知GB11602-89《集装箱港口装卸作业安全规程》和GB5082-85《起重吊运指挥信号》 c、指挥手应了解桥吊的技术性能。 d、指挥手应掌握对可能出现的事故所应采取必要的防范措施。 3.2指挥手的职责及要求:
a、指挥手应根据本标准和GB5082-85《起重吊运指挥信号》的要求与桥吊司机进行联系,负责指挥司机摆放、起吊集装箱和舱盖,发现异常及时发出警示信号,并协助司机采取必要措施。 b、指挥手发出的指挥信号必须清晰、准确,用“指挥语言”指挥时应讲普通话。 c、指挥手应经常清理作业现场,保持道路安全通畅。 d、负责制止与作业无关的人员、车辆在桥吊跨距范围内通过或停留; e、指挥手负责对可能出现的或已出现的事故采取必要的防范措施. f、指挥手应佩戴鲜明的标志,如标有“指挥”字样的臂章或特殊颜色的安全帽、工作服等. g、指挥手在船上指挥应遵守船方作业的安全要求。 h、负责桥吊防风应急预案中本岗位职责的落实。 3.3司机应具备的条件: 1、司机须年满18周岁,经身体检查合格,受过专门的安全教育和操纵桥式起重机的专门培训,实习期满,经国家指定部门考试合格,取得特殊工种操作证者,方可独立操纵桥吊投入工作。 2、司机必须熟知本标准和GB5082-85标准规定的各种指挥信号,并与指挥手密切配合。 3、司机应熟知桥吊的性能,要具有相应的实际操作技能。 4、司机应掌握桥吊防风设备的性能及操作. 5、司机应掌握对可能出现的事故所应采取必要防范措施. 3.4司机的职责: 1、司机必须听从指挥手指挥,当指挥信号不明时,司机应发出“重复”信号询问,明确指挥意图后,方可动车。 2、当指挥手发出信号错误,司机有权拒绝执行。 3、司机在装卸作业过程中,对任何人发出“紧急停止”信号均应服从。 4、司机操作时不准吸烟、吃东西、看书报、使用手机或对讲机等,严格执行安全操作规程。 5、司机应严格按所驾驶型号桥吊的技术操作规程执行。 6、负责桥吊防风应急预案中本岗位职责的落实。 7、司机严禁携带烟、火、易燃易爆品上桥吊。
判断题: 1. 集装箱吊具是一种通过箱体顶部框架传力的起吊工具,它具有与箱体相适应的结构,通过位于四个角部的转锁与箱体的四个顶角件连接,进行起吊作业。( √) 2. 目前我国港口起重机采用的集装箱吊具主要有以下两种:(1) 集装箱专用吊具(2)集装箱双箱吊具(×) 3. 这种吊具结构简单,自重轻,需辅助配合,生产效率低,由于单点起吊,集装箱在吊装中容易发生打转现象。( √) 4. 目前集装箱专用起重搬运机械,如岸边集装箱起重机、轮胎式集装箱龙门起重机、轨道式集装箱龙门起重机所采用的典型集装箱吊具有可伸缩单箱吊具和可移动双箱吊具两种。( √) 5. 可移动双箱吊具是指一次能同时装卸两个在一定范围内变动间距的20ft集装箱的伸缩式吊具。它由钢结构、转锁机构、伸缩驱动机构、导板机构、双箱移动机构、中间吊点装置、气压系统、电气系统等组成。( ×) 6. 可移动双箱吊具故障可分为机械系统故障、液压系统故障和电气系统故障三部分。( √) 7. 当吊具合上电源后吊具电动机转但空气开关马上跳掉,诊断原因为:空气开关额定电流过小或油泵有接地或短路等故障。那么处理方法是:调大空气开关额定电流或排除油泵故障。( √) 8、可移动双箱吊具的液压系统主要由泵源系统、双箱平移系统、中间升降系统、伸缩系统、导板系统和转锁系统等组成。( √)
9、可伸缩单箱吊具仅当4个转锁全部处于全开锁或全闭锁位置时,起升机构才允许动作。( √) 10、为了确保作业安全,吊具转锁除了电气联锁外,还装有液压联锁装置。(×) 选择题: 1. 集装箱专用吊具根据其结构型式可分为固定式、组合式和伸缩式三大类。( A ) A、固定式、组合式和伸缩式 B、手动式、自动式和半自动式 C、复合式、旋转式和伸缩式 D、固定式、单箱式和双箱式 2.经检查发现:吊具没有压力,并确认为是溢流阀故障,那么下一步的处理方案应是:( B ) A、------通过油位计检查油位高度,清洁过滤器。 B、------检查溢流阀运行是否正常、设定压力是否正确。 C、------将液压马达拆下,检查输出轴转动是否正常。 D、------检查电动机是否失灵。 3.经检查发现:吊具转锁不能打开,并确定为命令继电器触点粘住,那么下一步的处理方案应是:( A ) A 、更换继电器 B 、更换保险丝 C 、修理动力电源
优秀设计 XXXX大学 毕业设计说明书 学生姓名:学号: 学院: 专业: 题目:桥梁式集装箱起重机设计 指导教师:职称: 职称: 20**年12月5日
目录 前言 (2) 一主要设计内容及参数 (4) 二主梁结构设计 (5) 三小车设计 (7) 四起吊机构设计 (12) 五支架设计 (14) 设计小结 (15) 参考文献 (16)
前言 起重机被喻为“巨人之臂”,是广泛用于国民经济各部门进行物质生产和装卸搬运的重要设备。起重机的设计制造,从一个侧面反映了国家的工业现代化水平。我国起重机制造业奠基于20世纪50年代。70年代以来,起重机的类型、规格、性能和技术水平获得很大的发展。近年来在物流和工业企业发展的带动下,起重机行业进入飞速发展时期。 起重机主要分为桥梁式、悬臂式、塔式、龙门式、拉索式、液压伸缩臂式等形式。本设计以桥式双梁单小车集装箱起重机为例,介绍起重机的设计思路、设计内容以及设计方法。 起重机设计主要根据客户要求,在符合国家标准及机械工业标准中对起重机的要求下进行设计。设计方案的选择主要通过与客户沟通取得一致意见后确定,设计内容主要包括在起重机的实际工作环境下确定起重机的最大额定载荷、非正常载荷(如冲击载荷,风力载荷、震动载荷等)、操纵形式、使用寿命、检修方式以及安全等级等;确定起重机主要零部件的选材以及机加工和材料处理的方法;确定起重机的工作级别;确定其主要受力梁的截面形式、截面大小以及梁的材料选择和加工方法。由于桥梁式起重机体积和质量都比较大,所以在设计过程中还应考虑起重机的运输方案和安装方法。
一主要设计内容及参数 1、起重机首先要确定的是工作级别 本设计的起重机用于集装箱生产制造或物流行业。 起吊件为生产下线的集装箱,或物流行业待装货的集装箱,所以都是空箱。起吊重量为5T 根据起重机行业标准,不管是集装箱生产行业还是物流行业都是生产节奏比较快的,因此该起重机的工作级别定为A5级,起吊机构工作级别为M5。 2、根据以上所规定级别设置设计内容及参数 a.主梁结构 主梁涉及到的主要设计内容或参数主要有:主梁的截面形式、截面大小、所用材料、制作方法、主梁上平面的平面度、侧面的平面度和垂直度、主梁应该具有的上拱度,还有主梁上的轨道安装等等。 b.支架结构 支架需要设计的主要内容和参数包括:截面形式、截面大小、使用材料、制作方法、支腿的垂直度误差、支腿与地面的连接方式等等。 c.小车机构 小车机构要设计的主要内容和参数包括:小车架设计;起吊机构设计; 小车行走机构设计。根据起吊重量设计小车架截面;根据所需要元件的安装位置设计小车架的结构;根据工作级别设计行走机构中电机的功率和类型; 根据起吊高度确定卷筒的直径和长度;根据工作级别确定主电机的功率以及减速机的型号。确定其他一些元件的型号。 d.控制机构 控制机构主要设计其控制室的制作和安装、控制电路的安装、进出控制室的方法。控制室的制作和安装应符合起重机行业标准中的相关内容;控制电路属于电气范畴在此不予讨论。 f.安装调试 根据起重机行业标准规定,起重机在生产完备后需要在本厂安装调试,合格后方能出厂。调试的主要内容有小车的运行情况;司机室的视野状况和温度;在1.25倍额定起重量下把小车开到中跨,持续30分钟,卸载后主梁不得有永久变形,主梁和其它部件上的油漆不得有剥落现象,小车架不能有永久变形。
2000型岸边集装箱起重机 使 用 说 明 书 编制: 校对: 审核: 上海**重工有限公司
目录 一、概述 1. 产品特点 2. 主要技术性能 3. 设计制造标准 4. 起重机工作级别 5. 使用环境条件 二、结构特征与工作原理 1. 金属结构 2. 主小车 3. 起升机构及钢丝绳缠绕系统 4. 小车运行机构 5. 大梁俯仰机构、钢线绳缠绕系统及安全钩 6. 大车行走机构 7. 倾转装置 8. 电缆拖令系统及电缆卷筒装置 9. 吊具及吊具上架装置 10. 司机室及机器房 11. 电梯 12. 机器房维修行车 13. 液压系统 三、安全注意事项 1. 起重机运转前的准备事项 2. 作业后的注意事项 3. 防风防台注意事项 4. 码头轨道基础
一、概述 本起重机是上海**重工有限公司专为巴拿马型集装箱船作业的需要而设计制造的轻型岸边集装箱起重机。 1. 产品特点: 本起重机是集装箱码头前沿装卸集装箱船舶的专用起重机,可沿与岸线平行的轨道移动。海侧前伸臂在船舶靠岸、离岸及转换工作泊位与不工作时可以仰起,以免碰撞船舶的上层建筑。本机吊具下的额定起重能力为35吨,最大前伸距为28米,配套20’,40’的集装箱单箱吊具,同时配有吊钩横梁换下吊具换上吊钩横梁后可起吊50吨重的货物。特殊情况下通过吊具上架的四只吊耳,可起吊48吨重的货物。 本机的上机电源为交流三相10KV±10%,50Hz±1Hz。供电方式为将设在码头海侧地面供电坑中的输出的电源,通过装在海侧门框上的高压电缆及电缆卷筒,然后供电给起重机,高压电源经高压进线柜、开关柜、高压变压器、配电柜来驱动各主要工作机构及辅助机构。本机采用交流变频电控系统,有先进的电气调速、控制性能,可实行故障诊断显示。 本机的前大梁采用三角形管桁架结构,后大梁采用梯形板梁结构,小车轨道布置在梁的外侧。海陆侧门框、梯形架采用矩形梁结构,斜撑杆为螺旋管结构,前大梁的拉杆为“H”型结构,后大梁与海陆侧门框均为刚性连接,整机钢结构具有足够的强度与刚度。小车轨道采用QU80轨道,特殊的铰点结构及轨道接头型式,使高速、重载小车能平稳运行。 主小车为自行式小车,整个小车置放在大梁外侧的轨道上,小车结构简单、自重轻、易于维修,主操纵室支承在小车上,随小车同步运行,小车起制动平稳、定位精确、对箱方便。起升机构、臂架俯仰机构以及电气高压、低压控制设备均安装在单独的
第一章概述 第一节集装箱运输的发展概况 一、什么是集装箱? 集装箱(Container)是一种货物运输设备,便于使用机械装卸,可长期反复使用。也称作"货箱"或"货柜"。 二、集装箱运输方式 集装箱运输是一种先进的运输方式,它利用特制的箱体运送货物,周转快、货物损失少、运费低。集装箱化始于1966年,当时,美国海陆公司在北大西洋航线上开始使用改装的集装箱船Fairland号,从此,可以载运许多集装箱船取代了传统的班轮船舶。集装箱运输发展迅速,很快成为水路、陆路、空中运输的一种统一方式。 集装箱运输和传统的运输方法相比有以下特点: 1、最有效地提高件杂货的装卸效率。件杂货是国际贸易中进入集装箱的主要货种,现代岸边集装箱起重机(以下简称岸桥)平均每小时可以作业30~40 TEU(标箱)。每个标箱以11t 计,即每小时装卸350~400 t。过去装卸件货多采用门座起重机或船舶吊杆,由于件杂货堆码、出舱不便等原因,生产率低,如起重量为10 t的门座起重机每小时平均生产率只有30~35 t。采用集装箱运输后,件杂货的装卸效率奇迹般地提高了十几倍,甚至几十倍(多机作业)。 2、保证货物在运输过程中的安全,防止货物被盗,大幅度减少甚至消灭了货损货差。用传统方式装卸件杂货,出现1%~2%的货损和货差是难免的,对于玻璃类易碎货物则高达10%以上,而集装箱运输基本消灭了令运输企业极为头痛的货损货差。现在玻璃器皿、建筑材料和各种瓶装饮料能够大量地在国际间运送,首先应归功于这种安全可靠的运输方式。件杂货在运输过程中如何防偷盗始终是运输企业面临的一大难题,而集装箱运输用“门锁+铅封”的办法,从根本上解决了防止偷盗的问题。 3、船舶装卸实现全天候作业。过去在件杂货码头,为减少货损,作业规程规定逢雨天必须关闭舱口、停止作业。在多雨季节,不少码头几乎有1/3的日历时间不能作业。为解决这个难题,不少专家出谋献策,但始终没有好办法。集装箱运输从根本上解决了这个问题,使件杂货装卸实现全天候作业。 4、充分利用了堆存货场面积和空间,基本取消了仓库。过去件杂货到岸后必须进入仓库,即便放在货场,也需遮盖。集装箱运输则利用原箱堆码在货场;它既可防雨,又可防盗。一般集装箱堆场可以堆码4~5个箱高,在少数国家和地区,其堆码高度高达7个箱高(国际集装箱的设计规定每箱承压为9个高),充分利用了堆场面积和空间。 5、集装箱可重复使用。运输件杂货过程必须有包装。除去产品自身的外包装以外,作为一
岸边集装箱桥式起重机安全操作标准 1 范围 1.1本规程规定了岸边集装箱桥式起重机(以下简称桥吊)司机(以下简称司机)进行集装箱、特种作业等工作时在作业前、作业中、作业后的安全操作要求。 1.2本标准适用于港口装卸司机操作、安全生产监督检查。 2 依据标准 GB11602-89《集装箱港口装卸作业安全规程》 GB5082-85 《起重吊运指挥信号》 GB1992-85 《集装箱名词术语》 3.术语 3.1岸边集装箱桥式起重机Quayside container crane(简称岸桥、桥吊):在码头前沿进行集装箱装卸作业的装卸设备,它是现代集装箱专业码头对船作业的最主要工具。 3.2 4操作标准 4.1未取得该类特种设备作业资格证书者不得独自从事该项工作;学徒上机操作时必须有师傅在场监护。取证后独立作业未满1年者,禁止独立进行特种作业。 4.2桥吊司机应穿戴好劳动保护用品,安全帽要生根,拉紧衣服拉链,扣好衣扣,系紧鞋带。 4.3禁止酒后上机作业。禁止携带个人通讯工具上机。 4.3上下桥吊注意事项 4.3.1 上下桥吊时应精神集中,抓牢扶手,逐阶上下,严禁追逐打逗,不准披衣夹物,非工作人员严禁上桥吊。 4.3.2 上下桥吊时所带物品、工具必须放在工具袋内背好,较重的物品、工具应用绳子提放,严禁抛掷工具和物品。 4.3.3 桥吊在作业中,禁止任何人员上下。如确需上下时,必须通知司机,停止桥吊动作后方可上下桥吊,并保持联系。 4.3.4经过司机室通道安全门时,必须和驾驶室司机取得联系,否则不准穿越安全门。 4.3.5使用电梯上下桥吊时,电梯载重和乘员均不得超过铭牌或技术规范规定数值,在层门和轿厢门关好后,方可启动电梯。 4.4作业前要求 4.4.1作业前,司机及报关手应将无线对讲机调至同一规定频率,并进行试讲。 4.4.2作业前,司机必须进行交接班。 4.4.3交接班司机应按照桥吊规定的检查内容,逐一进行交接,并确保符合要求。 4.4.4接班司机和报关手共同检查桥吊周围的作业环境,排除障碍物,解除锚固和防风楔。 4.4.5 司机检查各操作手柄在空档位置,确认后方可接通各部位电源。 4.4.6司机在作业前必须进行空载试车。 4.4.7 司机操作俯仰(也称前大梁)时(包括使用自动方式操作俯仰),应注意涨潮、船舶位置等变化因素,防止前大梁与船舶碰撞。在前大梁下降到水平“俯仰水平”灯亮或俯仰上升至“俯仰进钩”灯亮之前,司机不准离开俯仰操作室。 4.5作业中要求 4.5.1作业中对司机操作的基本要求 司机在严格遵守各种规章制度的前提下,在操作中应做到以下六点: 1.稳司机在操作桥吊的过程中,必须做到起动、制动平稳,吊具和集装箱不游摆,不砸箱。2.准在操作稳的基础上,吊具和所吊集装箱应准确地停在指定位置上方降落。 3.快在稳、准的基础上,协调相应各机构动作,缩短工作循环时间,保证桥吊不间断连续工作,提高生产效率。 4.节能长时间不作业,应停车等待,实现降耗目标。 5.合理在掌握桥吊性能的基础上,根据集装箱的箱型,正确地操纵桥吊并做到合理控制。
XX技术学院企业供电 学号 姓名
摘要 (2) 前言 (3) 第1章轨道式集装箱龙门式起重机 (5) 1.1 概述 (5) 1.2 特点 (8) 1.3 分类 (9) 1.4 主要技术参数 (9) 1.5 集装箱门式起重机机构 (10) 第2章门式起重机的工作机构 (12) 2.1 概述 (12) 2.2 起升机构 (12) 2.3 小车走行机构 (13) 2.4 大车走行机构 (14) 第3章门式起重机的电气设备 (17) 3.1 概述 (17) 3.2 电动机 (19) 3.3控制电器及选用 (21) 结语 (24) 谢词 (25) 主要参考文献 (25)
摘要 轨道式集装箱门式起重机是目前国内外非常受推崇的一种集装箱堆场机型,我国港口越来越多地选用这种机型。本文介绍轨道式集装箱门式起重机的三大工作机构、电气设备和电气控制系统等内容,主要是集装箱门式起重机的电气控制系统的设计过程。 关键词:门式起重机,电动机,变频器,接触器,继电器
前言 随着社会生产力的发展,起重机械在不断地发展和完善。这是因为.起重机械是物流机械化系统中的重要设备。社会化大生产愈发展,人民生活水平愈提高,物料搬运和人员的输送量就愈大,起重机械的应用范围也就愈广泛。根据人类生产和生活的需要.许多具有持殊用途的新型设备不断出现。 门式起重机(也称门吊)是属于桥式类型起重机的一种,由于它的金属结构象门形框架,承载主梁下安装两条文腿,可以直接在地面的轨道上走行,并且主梁两端具有悬臂梁(主梁的延长),相似“龙门”故称为龙门起重机。悬臂梁的作用可使起重小车在主梁上的走行距离延长,扩大作业范围。 门式起重机也是由机械传动、金属结构和电气设备三大部分组成。机械传动部分又由起升机构、起重小车走行机构、大车走行机构等构成。即为门式起重机的三大工作机构,它们分别实现吊装货物的上下升降,左右(横向)搬移和前后(纵向)搬运三个动作,构成一个作业区域。 起重机的电气设备主要有动力设备——电动机,操作电器——磁力起动器、凸轮控制器、主令控制器、变频器、接触器、电阻器、继电器等,电气保护装置——保护箱、过电流继电器、熔断器、行程限位开关、安全保护开关等;导电装置以及电气电路——工作电路(主回路)和控制电路等组成。 集装箱门起重机根据用途的不同,有铁路货场用的,有港口码头用的。根据结构的不同,有起升机构带刚性吊杆的和带挠性悬挂吊具;根据集装箱载重量大小可分为5吨、10吨、20吨和30.5吨几种;还有根据走行机构的不同,有轮胎式和轨道式。 谈到起重机的电气设备,必涉及起重机的电气控制的设计问题。任何生产机械电气控制系统的设计,都包括两个方面:一是满足生产机械和工艺的各种控制要求,另一个是满足电气控制系统本身的制造、使用及维修的需要。因此,电气控制系统设计包括原理设计和工艺设计两方面。前者决定起重机的使用效能和自动化程度,即决定起重机设备的先进性、合理性。后者决定电气设备生产可行性、经济性、外观等性能。 本次设计的起重机为重庆寸滩港的轨道式集装箱门式起重机,该起重机采用双主梁,跨距40.5t-40m,两端有效悬臂10m,可进行20'到40'国际标准集装箱
集装箱岸桥作业摄像监控系统 第一章集装箱特种防震摄像系统的作用与意义 一、需求与必要性 集装箱是码头作业重要的起重装卸设备,其重要性不仅体现在对码头的经济效益上,码头工作人员能否在装船前发现箱体是否有坏损,工作人员识别每个箱是否锁具完好,炎热天气或风雨天气工作人员是否适合长时间室外检查或读取箱号等等,这些也同时涉及到工作人员的实际利益和生产安全。 在现在集装箱岸桥上安装摄像装置,就能解决上述问题,但普通摄像机并不能很好的胜任这一工作。 因为岸桥的特殊性还体现在作业时的震动和干扰上,众所周知,普通监控(即平面监控)是安装于楼宇、门卫或高架杆上,这些安装位置都是绝对固定和稳定的,且根据安防标准,布线都要与动力电线保持50cm距离。而要将这样的平面监控设备安装于岸桥上,是无法承受岸桥装卸作业时产生的震动强度的,更不要说是长期大幅度的震动、晃动;布线时由于受岸桥钢结构的限制,部分视频线有时要与动力线或其它岸桥电缆并行,这种情况下的干扰如何解决也是平面监控器材商或工程商最头痛的事;除此之外平面监控的显示屏都配置的是普通液晶,在办公室或监控中控室的空调环境下,可以良好的运行,但绝对不适合岸边这样海风侵蚀性环境,因为普通液晶不坑震,会出现闪断或间断性蓝屏,其次屏芯易受侵蚀,用不了多长时间就会损坏。 二、功能与作用 1 我公司防震系列产品的最主要特性就是抗震、减震,因为我们的防震 产品除内部摄像机采用日本进口SONY(或韩国进口三星)品牌机外,所有内、外部结构均由我公司自主开发,整体小巧而且紧凑,结构强度大,抗震等级高;遇震动超大的环境还可加装内部减震结构,将外力卸掉,使得内部精密摄像机得以在相对稳定的状态下长时间工作。
行业资料:________ 岸边集装箱起重机(桥吊)安全技术操作规程 单位:______________________ 部门:______________________ 日期:______年_____月_____日 第1 页共9 页
岸边集装箱起重机(桥吊)安全技术操作规程 1.范围 在《安全技术操作规程通则》有关规定的基础上,本规程还规定了岸边集装箱起重机(以下简称桥吊)司机和指挥人员在作业中的安全操作要求。 2.操作标准 2.1 上下桥吊 2.1.1 登机时手扶栏杆,逐级上梯。所带物品、工具必须放在工具袋内背好,不准披衣夹物。较重的物品、工具用电梯传送或用吊机吊运,严禁抛掷工具和物品。 2.1.2 在作业过程中,禁止任何无关人员登机,如须登机时,必须通知司机。人员离开桥吊时也要通知司机。 2.1.3 经过司机室通道安全门时,必须和驾驶室司机取得联系,否则不准穿越安全门。 2.1.4 使用电梯上下桥吊时,电梯载重和乘员均不得超过标牌规定数值,在层门和轿厢门关好后,方可启动电梯。 2.2 作业前 2.2.1 交接班司机必须在桥吊驾驶室内面对面交接,登机前应检查确认高压电缆、吊具、大车行走台车外观无损伤。 2.2.2 接班司机应按照桥吊运行日志的检查内容,对司机室内各操作手柄、电器仪表、工作开关、辅助用电器、灭火器是否在位且符合标准等情况进行确认,然后送控制电源,查看各灯光信号指示正常后,进行空载试车,各项交接完毕无误后,签字确认。 第 2 页共 9 页
2.2.3 司机进入驾驶室后,必须关好驾驶室门,调整好座椅,系好安全带。 2.2.4 司机在作业前必须进行空载试车,空载试车内容: 2.2.4.1 脱开锚定装置,选择安全位置,放下前伸臂,对起升、小车、大车进行逐项试车;起升、小车应进行全程试车,检查各机构工作是否正常,确认钢丝绳、制动装置及其他安全装置工作可靠。 2.2.4.2 吊具应试验各个状态(包括使用双箱吊具状态)。 2.2.4.3 检查现场作业环境,观察轨道有无障碍物,打开锚定销,清除防爬楔。 2.2.4.4 检查各种仪表、安全警报器及限位装置是否灵敏有效。 2.3 作业 2.3.1 卸船作业 2.3.1.1 桥吊司机在起吊第一个集装箱时,进行重载起升试车,起吊高度约0.5米停吊具,确认起升制动装置是否可靠。 2.3.1.2 船上装卸指挥手检查吊具运行路线区域内无人,集装箱之间的连接旋锁和螺栓加固件已经拆除,方可用对讲机对桥吊司机发出作业指令。与此同时,观察吊具运行状态和运行路线中可能产生影响的障碍物和进入路线内的人员,并提醒桥吊司机提前实行避让措施。 2.3.1.3 桥吊司机根据指挥手的指令,将吊具轻落于集装箱上后暂停,指挥手“关锁”指令,确认顶销灯亮后关闭旋锁。 2.3.1.4 桥吊司机在确认闭锁指示灯亮后,按指挥手“慢升高”指令,低速起升20-25厘米后,由指挥手下达“停”指令停吊具。 2.3.1.5 指挥手与桥吊司机同时检查集装箱吊起无异常情况,指挥手下达“升起”指令后,桥吊司机方可操作正常起升。 第 3 页共 9 页
第十章集装箱吊具、吊具上架、吊钩横梁 第一节集装箱吊具 集装箱吊具是装卸集装箱的专用吊具,它通过其端部横梁四角的旋锁与集装箱的顶角配件连接,由司机操作控制旋锁的开闭作业。集装箱吊具的质量与可靠性,直接影响着起重机的整机性能。 ZPMC集装箱吊具按照ISO标准设计和制造。设汁时,充分考虑了集装箱起重机的恶劣工况,采用了特殊的防震、防松、防潮和防高温措施,从而保证集装箱作业安全。 一、集装箱吊具的型式 集装箱吊具按其结构特点,可分为4种型式。 1、固定式吊具 固定式吊具也称整体式吊具,它只能装卸一种规格的集装箱。它无专用动力装置,是通过钢丝绳的升降带动棘轮机构驱动旋锁转动,从而以钢丝绳机械运动的方式实现自动开闭锁销。这种吊具结构简单、重量轻,但使用不便,一般用于多用途门机和一般门机上(图10-1-1)。 2. 主从式吊具 主从式吊具也称组合式吊具。这种吊具由上下两个吊具组合而成。一般上吊具为20 ft,下吊具为40 ft。在上吊具上装有动力装置。起吊不同规格的集装箱时,只要装上或卸下下吊具即可。主从式吊具与固定式吊具相比,它使用方便,但重量较大,如图10-1-2。 3. 子母式吊具 子母式吊具也称换装式吊具。这种吊具在其专用吊梁上装有动力系统,用来驱动下面吊具上的旋锁机构。在吊梁下可换装20 ft、40 ft等多种规格集装箱固定吊具。与主从式吊具
比较,它具有自重较轻,但更换吊具花费的时间较长,如图10-1—3。 4. 伸缩式吊具 或油缸,使吊具自动伸缩改变吊具长度,以适 应装动伸缩改变吊具长度,以适应装卸不同规 格的集装箱。伸缩式吊具虽然重量较大,但长 度调节方便,操作灵活,通用性强,生产效率 高,因此目前世界上的集装箱专用机械大都采 用这种吊具(图10-1—4)。 图10—1—3 子母式吊具 二、固定式吊具 固定式集装箱吊具由传动机构(图10-1—5)、牵引机构、联杆机构、旋锁机构、固定 导板和结构件等组成。其工作原理如下:当挂在起重机吊钩上的牵引钢丝绳张紧时,带动一 套传动机构转动,传动机构带动联杆运动使旋锁闭锁。该传动机构是一个每次能旋转180°的棘轮装置。当牵引绳松弛时,牵引机构中的一根复位弹簧使驱动机构的下转盘复位;当牵引钢丝绳再次张紧时,又带动该套驱动机构转动使旋锁开锁。在每套40 ft固定吊具的联杆下各有一套托辊装置,承受联杆的重量并确保联杆的灵活运动。锁销机构联杆上的一个曲柄按比例将驱动机构的180°转动转化成锁销的90°转动,从而实现了吊具的自动开/闭锁动作。机械联锁装置确保了只有在吊具完全着箱后,旋锁才能做开闭锁动作。吊具四角的4个固定导板方便了操作者的快速对箱。 另外,在吊具的两端分别装有一套开闭锁指示器,向司机提示锁销的开闭锁状态。 ZPMC生产的固定式吊具分为20 ft和40 ft两种。
摘要:随着我国集装箱吞吐量的快速增长,各大港口集装箱吞吐量连年稳居世界第一,本文通过对岸边集装箱起重机的简介,市场环境,发展前景等分析得出集装箱起重机应用前景广阔。 1 概述 随着中国与世界贸易的不断发展,为港口提供了源源不断的货源,港口吞吐量逐年增加,呈现了良好的发展势头。随着货物集装化趋势加深,全球集装箱运输量也不断上涨,我国沿海大型综合港口的集装箱吞吐呈现快速增长趋势。回首10年,我国经济一直飞驰在高速增长的轨道上,进出口贸易快速增长,贸易总额在世界的排名不断提升。在此期间,承担对外贸易一半运量的集装箱运输业务,在进出口贸易量激增的影响下,集装箱吞吐量连续15年保持20%的高增长。2005年我国港口完成集装箱吞吐量达到了9300万标准箱,2007年我国集装箱吞吐量突破一亿标准箱,2011年全年,我国规模以上港口货物吞吐量为91.0亿吨,同比增长12.3%。我国港口集装箱吞吐量已连续数年稳居世界第一。 与此同时,随着对规模经济效益的日益追求和造船技术的提高,使得船舶日益大型化。这使得对集装箱码头泊位、航道、港机等各方面设施设备必须去适应船舶大型化的发展。我国沿海许多大型港口都为集装箱装卸业务配置了现代化的装卸设备以应对快速增长集装箱吞吐量,其中高效率的岸边集装箱起重机需求空间最大。 2 集装箱起重机简介 2.1 集装箱起重机种类 岸边起重机即岸壁集装箱装卸桥,简称岸桥。岸桥是一种设置在码头岸边的高架可移动式的大型起重机,岸桥是目前专业集装箱码头的主要船舶装卸设备。它临海侧有外伸的悬臂,悬臂是活动的,平时悬臂竖起,悬臂放平即可进行装卸船作业;悬臂的陆侧有后伸臂;整个岸桥可以在沿着与码头岸线平行的轨道上行走,如下图所示。
集装箱技术要求 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
一、关于此批次罐体集装箱的技术要求: 1、设备整体要集中于集装箱内 2、设备在集装箱内要有牢固的固定 3、集装箱外观要整洁大方、美观合理 4、集装箱顶部为可拆卸式,四周用吊装螺栓固定。吊装螺栓杆长150mm左 右,以便使用时能在顶盖与箱体中间加上套管把顶盖支起来。吊装螺栓要求有金 属及橡胶密封垫,以便紧固后防雨。建议用M16-18螺栓。同时备出4根 100mm左右套管。 5、两面(长度方向)设计为对开门形式,采用集装箱铰链、锁杆、托架、条 杆、门封等。 6、顶部四角设计为吊装点,便于吊装;底部设计吊点及叉车预留点,便于吊装 及叉装。 7、外部门有锁,可进行封锁。 8、底部预留排水孔,方便检修时排水。 9、整体考虑防雨设计。 10、外观要有公司logo等,起吊点、危险点、重心点要有明确标识。 二、集装箱技术参数要求: 1、设备1尺寸外形尺寸:长1.8mX宽1.3mX高2m(可作为集装箱内部尺寸) 2、设备2尺寸外形尺寸:长1.3mX宽0.9mX高1.6m(可作为集装箱内部尺寸) 3、具体尺寸可参见图纸尺寸。 4、箱体2个端面门上喷涂公司标识,要求均匀布置于端面门(2个端面门均喷涂) 上,外观美观大方(注:不得更改标识样式与颜色),可以喷涂于端面门中上部 5、箱体颜色整体要求灰白色,铰链、锁杆、托架、条杆等要求为镀锌件。
6、箱体用材料标准见图纸,其余可参见下表所要求。 产品规格: 第一批2300*1700*2200(mm)第二批1800*1300*1800(均为箱体 外尺寸) 产品配置:箱体两面对开集装箱门;顶部为活顶,可折装. 产品用 料: 箱体框架: 顶板为1.6mm集装箱瓦楞板;底梁:12#槽钢;底板为4.0mm花纹铁板; 箱体顶边梁为(3.0*50*100)方管或槽钢;箱体底部四角焊接角件,顶部吊 点. 集装箱门配件:锁具为集装箱专业镀锌锁具,防水胶条为耐侯\全胶胶条. 共喷三层漆,富锌底漆,中间为环氧云铁,面漆为丙烯酸聚氨酯高防腐 船舶漆,颜色按要求选择! 角柱尺寸请参考图纸。 公司标识见下图:(请注意严格按照标识样式、比例及颜色喷涂,不得更改) 参考样式:
附三集装箱轮胎式龙门起重机司机安全操作流程 本操作流程遵守青岛港(集团)“装卸机械司机通用安全守则”中的有关规定,并执行本安全操作流程。 轮胎式龙门起重机作业前应做到: 1.轮胎式龙门起重机司机必须经专业培训合格,持证上岗。特种作业人员应持特种作业安 全操作证。 2.班前、班中严禁喝酒;上岗前应休息好,保证工作中精力充沛。 3.轮胎式龙门起重机司机到达单位后更换工作服,按规定穿戴好劳动保护用品,安全帽一 定要生根,所带物品一定要用背包(公司禁带物品,不能上车),不能手提肩扛,披衣夹物。 4.参加配工会,由固机队长或领班主持安排当班生产任务及各项要求,轮胎式龙门起重机 司机要了解上一个班生产完成情况,以及本班工作重点,安全注意事项。 5.排队出场,按照公司规定的出场路线,队列要整齐,步伐要统一。 6.交班司机把机械停放到安全位置,放下吊具到地面1.5米处。 7.接班司机履行轮胎式龙门起重机交接班制度,按照轮胎式龙门起重机机械检查内容,认 真做好机械检查并做好记录。 8.登机前,检查轮胎式龙门起重机外部有无损伤及门腿各限位是否正常,防风锚定安全装 置有无缺损,清除大车行走路线的障碍物。 9.轮胎式龙门起重机司机上下机时应手扶栏杆,逐级上、下梯。 10.空载试车选择安全位置,对起升、下降、小车、大车、紧急停车等进行逐项试车;起升、 小车应进行全程试车,检查各机构工作是否正常,确认钢丝绳、制动装置及其他安全装置符合规定。 11.吊具应试验各个动作状态。 12.检查完毕接班司机按照所检查项如实填写交接班日志,交班司机确认后方可离机。 作业中应做到: 13.随时注意小车行走轨道有无异响,电缆有无缠绕。 14.集中思想,认真操作,严禁做与作业无关的事情。 15.司机要明确扭锁开关位置状态。起吊第一钩货时,起吊高度约0.5米停钩,确认起升制 动装置是否可靠。 16.司机操作时应眼随吊具、余光了望。起钩平稳、落钩轻准。 17.避免钢丝绳跳出滑轮槽,落钩吊具钢丝绳应垂直。 18.小车运行时,司机必须确认吊具高度、位置,谨防与集装箱发生碰撞。 19.除维修和检查工作外,吊具伸缩必须在5米以上空中进行,吊具下严禁站人。 20.轮胎式龙门起重机夜间作业,司机应打开工作照明灯。 21.轮胎式龙门起重机在换场地作业时,大车移动必须联系专人监护。 22.轮胎式龙门起重机司机不准依靠行程开关和主令控制限位器停止各机构的动作。 23.轮胎式龙门起重机上的通话设备工作时,不准关机和随意调换频道。 24.电控室内温度控制在5℃—25℃,超过30℃应立即报告,并禁止司机调整空调器设定温 度。 25.轮胎式龙门起重机启动后,司机不准离开驾驶室。未经允许,无关人 员不准登机。大车移动时,禁止人员上下扶梯。 26.轮胎式龙门起重机司机参与维修作业时,无指挥口令严禁私自动车或离开司机室。 轮胎式龙门起重机作业完毕安全规定 27.作业完毕,应将轮胎式龙门起重机停放在规定的安全位置。
The optimization of container berths and shore bridge coordination scheduling Martin E Abstract The global economic development, the container quickly raised up into exports. Rapid growth of the import and export cargo throughput brings to the container terminal larger benefits at the same time increase the burden of the port, have higher requirements on the terminal operation efficiency. How is the existing equipment of container terminals, reasonable resource allocation and scheduling, is common problem facing the container terminal. Therefore, how to improve the terminal facilities such as the maximum utilization of resources, to meet the increasing port demand, improve their competitive advantage, and has more practical meaning to improve the working efficiency of the container terminal. The main content of this study is berth, gantry cranes and set card co-allocation research, has plans to all ship to the port assignments during mathematical model is established with the target of minimum cost, according to the characteristics of the scale model by genetic algorithm, finally validates the effectiveness of the model. Keywords: System engineering; Water transportation; Gantry cranes allocation; Dynamic scheduling; 1 Introduction Container terminal logistics is an organic system, made of interactive and dy namic components, such as containers, ships, berths, yards, tracks, quay cranes and yard cranes trucks, labors and communications, in a limited terminal space. It is a complex discrete event dynamic system related to kinds of complicated problems in l ogistics transport field. Berth scheduling (berth allocation) refers to the vessel arrival before or after according to each berth free condition and physical condition of the constraint for ship berthing berth and berthing order. To port berth scheduling optimization research has made important progress, but research is only limited to the single scheduling berth and shore bridge. Of berth scheduling problem in recent years has been based on simple berth scheduling considering more factors, but only for gantry cranes operating
岸边集装箱起重机(桥吊)安全技术操作规程 1. 范围 在《安全技术操作规程通则》有关规定的基础上,本规程还规定了岸边集装箱起重机(以下简称桥吊)司机和指挥人员在作业中的安全操作要求。 2. 操作标准 2.1 上下桥吊 2.1.1 登机时手扶栏杆,逐级上梯。所带物品、工具必须放在工具袋内背好,不准披衣夹物。较重的物品、工具用电梯传送或用吊机吊运,严禁抛掷工具和物品。 2.1.2 在作业过程中,禁止任何无关人员登机,如须登机时,必须通知司机。人员离开桥吊时也要通知司机。 2.1.3 经过司机室通道安全门时,必须和驾驶室司机取得联系,否则不准穿越安全门。 2.1.4 使用电梯上下桥吊时,电梯载重和乘员均不得超过标牌规定数值,在层门和轿厢门关好后,方可启动电梯。 2.2 作业前 2.2.1 交接班司机必须在桥吊驾驶室内面对面交接,登机前应检查确认高压电缆、吊具、大车行走台车外观无损伤。 2.2.2 接班司机应按照桥吊运行日志的检查内容,对司机室内各操作手柄、电器仪表、工作开关、辅助用电器、灭火器是否在位且符合标准等情况进行确认,然后送控制电源,查看各灯光信号指示正常后,进行空载试车,各项交接完毕无误后,签字确认。 2.2.3 司机进入驾驶室后,必须关好驾驶室门,调整好座椅,系好安全带。 2.2.4 司机在作业前必须进行空载试车,空载试车内容: 2.2.4.1 脱开锚定装置,选择安全位置,放下前伸臂,对起升、小车、大车进行逐项试车;起升、小车应进行全程试车,检查各机构工作是否正常,确认钢丝绳、制动装置及其他安全装置工作可靠。 2.2.4.2 吊具应试验各个状态(包括使用双箱吊具状态)。 2.2.4.3 检查现场作业环境,观察轨道有无障碍物,打开锚定销,清除防爬楔。 2.2.4.4 检查各种仪表、安全警报器及限位装置是否灵敏有效。 2.3 作业 2.3.1 卸船作业 2.3.1.1 桥吊司机在起吊第一个集装箱时,进行重载起升试车,起吊高度约0.5米停吊具,确认起升制动装置是否可靠。 2.3.1.2 船上装卸指挥手检查吊具运行路线区域内无人,集装箱之间的连接旋锁和螺栓加固件已经拆除,方可用对讲机对桥吊司机发出作业指令。与此同时,观察吊具运行状态和运行路线中可能产生影响的障碍物和进入路线内的人员,并提醒桥吊司机提前实行避让措施。 2.3.1.3 桥吊司机根据指挥手的指令,将吊具轻落于集装箱上后暂停,指挥手“关锁”指令,确认顶销灯亮后关闭旋锁。 2.3.1.4 桥吊司机在确认闭锁指示灯亮后,按指挥手“慢升高”指令,低速起升20-25厘米后,由指挥手下达“停”指令停吊具。 2.3.1.5 指挥手与桥吊司机同时检查集装箱吊起无异常情况,指挥手下达“升起”指令后,桥吊司机方可操作正常起升。 2.3.1.6 桥吊司机在起升及小车运行过程中,应密切注意吊具电缆情况,小车后驶方向有无异常情况及集卡是否到位。集卡应按岸边指挥手指挥停于正常作业位置前0.5
铁路集装箱专用门式起重机作业标准 1 、范围 本标准规定了集装箱专用门式起重机(简称:集装箱专用门吊)装卸作业程序、项目、内容和质量标准。 本标准适用于铁路管辖的车站货场集装箱专用门吊使用、操作及维护。 2 、规范性引用文件 下列文件对于本标准的应用是必不可少的。凡是注日期的引用文件,仅所注日期的版本适用于本标准。凡是不注日期的引用文件,其新版本(包括所有的修改单)适用于本标准。 GB5082-1985起重吊运指挥信号 TB/T1938-87铁路装卸作业名词术语 TB/T1937-87铁路运输货物堆码标准 TB/T1936.2-87铁路装卸作业标准桥式、龙门起重机作业 铁路货物装卸安全技术规则 3、术语和定义 3.1装箱 将重箱或空箱吊上车辆(含装汽车,下同)的作业,分为装重箱和装空箱。
3.2卸箱 将重箱或空箱由车辆吊下的作业,分为卸重箱和卸空箱。 3.3运箱 在作业警戒区运输集装箱的过程。 3.4堆箱 在作业警戒区码放集装箱的过程。 4 、岗位人员资格要求 4.1基本要求 集装箱专用门吊作业F-TR锁专用平车集装箱时,作业人员不得少于3名(含司机)。辅助人员、司机配对讲通讯设备,保证信息畅通,按规定着装、使用劳动安全防护品,持证上岗。 4.2司机 司机必须先取得特种设备作业人员证,经3个月以上的专业技术学习和实际操作培训,考试合格后,取得岗位合格证,方可独立作业。 4.3辅助人员 辅助人员经3个月以上的专业技术学习和实际操作培训,考试合格后,取得岗位合格证,方可独立作业。辅助人员负责作业区安全警示、作业中安全防护、瞭望、引导、装车质量检查及其他辅助性工作。作业时必须佩戴安全帽和肩夹式LED警示灯(蓝色、蓝黄间闪)。