
第27卷第4期2004年8月
鞍山科技大学学报
Jou rnal of A n shan U n iversity of Science and T echno logy
V o l.27N o.4
A ug.,2004无刷双馈电机的数学模型和
基于Si m u link4的仿真
陈海朋1,李 岩1,韩 伟2
(1.鞍山科技大学电子与信息工程学院,辽宁鞍山 114044;2.鞍山供电公司,辽宁鞍山 114001)
摘 要:无刷双馈电机是一种在许多方面都有着很好应用前景的新型电机.本文重新推导了无刷双馈电机的数学模型,并在M A TLAB S I M UL I N K环境下建立了仿真模型,为进一步构成控制系统,进行系统分析与设计奠定了基础.
关键词:级联式双馈电机;数学模型;仿真
中图分类号:TM301.2 文献标识码:A 文章编号:167224410(2004)0420273205
双馈电机又称异步化同步电机[1],与变频器一起可以实现机电系统的柔性连接,对提高电力系统的稳定性有重要意义.双馈电机可以在各种负荷下实现大范围的无级调速,将其用于风机、泵类负载时,具有显著的节能效果,同时也大大降低了所需变频器的功率.在可调速的电气转动方式中,这种调速方式的效率很高[2].特别是无触点双馈电机具有良好的应用前景.
目前国内外对无刷双馈电机的研究已从对电机结构的改进阶段发展到建立比较准确的实用模型阶段.可以看出,现有的无刷双馈电机的数学模型大多建立在d q0坐标轴系基础之上[3],并且在把电机内的电量折算到d q0坐标轴系时,往往取其综合矢量方向为q轴方向,这与当前教材不一致.而且,以往对无刷双馈电机的仿真程序大部分是用C或FO R TAN语言编写,这些语言对编制和调试矩阵运算、微分方程解法等程序很不方便.
针对上述情况,本文重新推导了无刷双馈电机的数学模型.并且以该数学模型为基础,利用M A TALB S I M U L I N K中的S函数和电源模块集(Pow er system b lock set),建立了无刷双馈电机的仿真模型,实现了该仿真模型与电源模块之间的耦合.
1 无刷双馈电机与级联式双馈电机的工作原理
级联式双馈电机(CD FM)与无刷双馈电机(BD FM)的结构相似,都相当于2台绕线式异步电机串级而成,具有2套分离的定子绕组,2套转子绕组.只是无刷双馈电机相当于2台绕线式异步电机同轴串级而成,并且2套转子绕组反相序联接,其结构如图1所示.
为分析方便,假定无刷双馈电机由极对数分别为p A,p B的绕线式异步电机A和B组成.电机A的定子直接与三相工频电网相连,电机内部磁场相互作用关系如图2所示.图中f A,f B分别为两定子绕组的供电频率,H z;f r A,f r B分别为两转子绕组感应电势的频率,H z;n为转子转速,r m in.
稳态运行时,无刷双馈电机的转速为
n=60(f A-f B) (p A+p B)(1)
收稿日期:2004203211.
作者简介:陈海朋(1978-),男,黑龙江兰西人,2001级研究生.
a .无刷双馈电机
b .级联式双馈电机
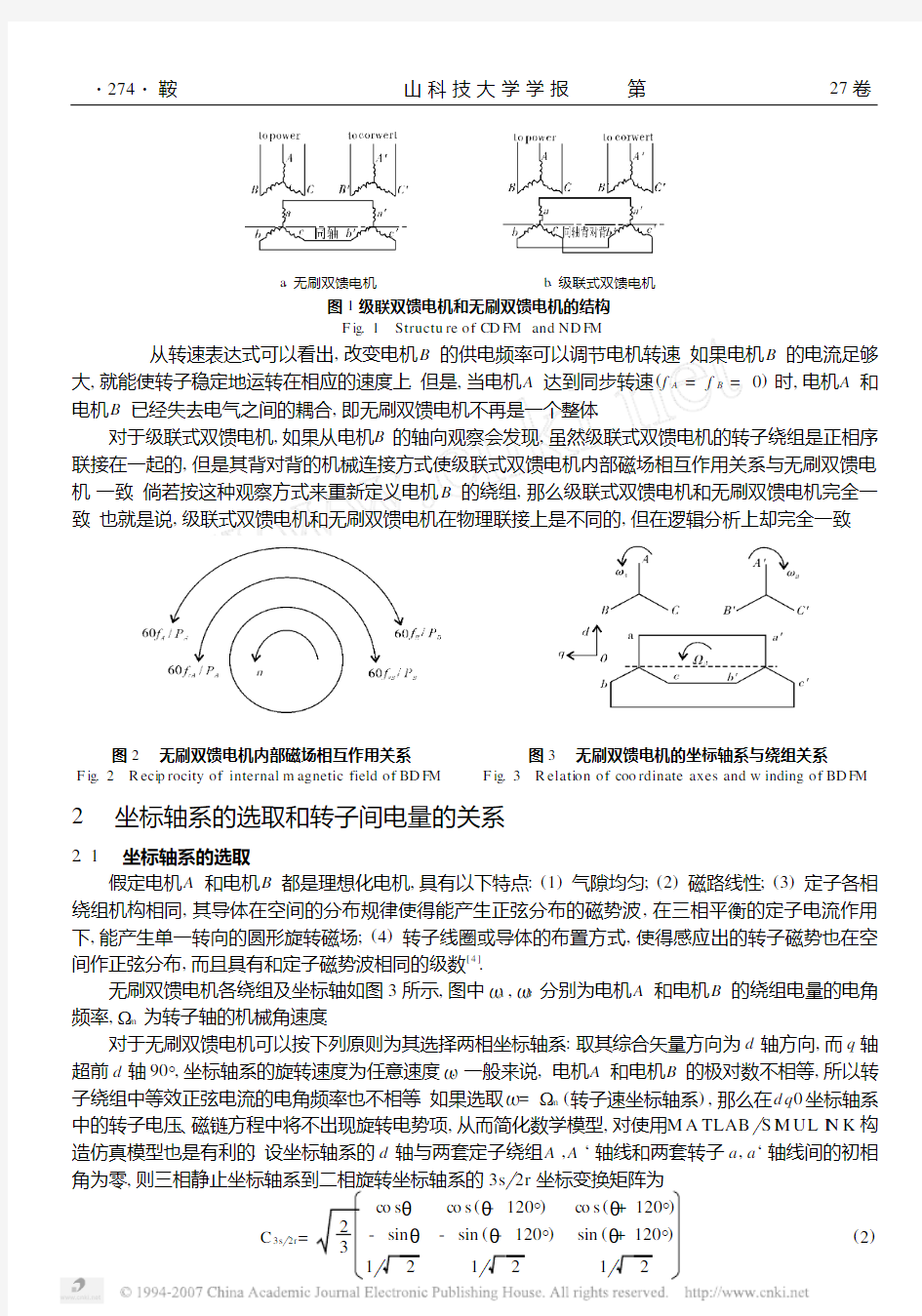
图1 级联双馈电机和无刷双馈电机的结构
F ig .1 Structu re of CD FM and ND FM
从转速表达式可以看出,改变电机B 的供电频率可以调节电机转速.如果电机B 的电流足够大,就能使转子稳定地运转在相应的速度上.但是,当电机A 达到同步转速(f A =
f B =0)时,电机A 和电机B 已经失去电气之间的耦合,即无刷双馈电机不再是一个整体.
对于级联式双馈电机,如果从电机B 的轴向观察会发现,虽然级联式双馈电机的转子绕组是正相序联接在一起的,但是其背对背的机械连接方式使级联式双馈电机内部磁场相互作用关系与无刷双馈电机一致.倘若按这种观察方式来重新定义电机B 的绕组,那么级联式双馈电机和无刷双馈电机完全一致.也就是说,级联式双馈电机和无刷双馈电机在物理联接上是不同的,但在逻辑分析上却完全一致.
图2 无刷双馈电机内部磁场相互作用关系F ig .2 R eci p rocity of internal m agnetic field of BD FM
图3 无刷双馈电机的坐标轴系与绕组关系
F ig .3 R elati on of coo rdinate axes and w inding of BD FM
2 坐标轴系的选取和转子间电量的关系
2.1 坐标轴系的选取
假定电机A 和电机B 都是理想化电机,具有以下特点:(1)气隙均匀;(2)磁路线性;(3)定子各相绕组机构相同,其导体在空间的分布规律使得能产生正弦分布的磁势波,在三相平衡的定子电流作用下,能产生单一转向的圆形旋转磁场;(4)转子线圈或导体的布置方式,使得感应出的转子磁势也在空间作正弦分布,而且具有和定子磁势波相同的级数[4].
无刷双馈电机各绕组及坐标轴如图3所示,图中ΞA ,ΞB 分别为电机A 和电机B 的绕组电量的电角频率,8m 为转子轴的机械角速度.
对于无刷双馈电机可以按下列原则为其选择两相坐标轴系:取其综合矢量方向为d 轴方向,而q 轴超前d 轴90°,坐标轴系的旋转速度为任意速度Ξ.一般来说,电机A 和电机B 的极对数不相等,所以转子绕组中等效正弦电流的电角频率也不相等.如果选取Ξ=8m (转子速坐标轴系),那么在d q 0坐标轴系中的转子电压、磁链方程中将不出现旋转电势项,从而简化数学模型,对使用M A TLAB S I M UL I N K 构造仿真模型也是有利的.设坐标轴系的d 轴与两套定子绕组A ,A ‘轴线和两套转子a ,a ‘轴线间的初相角为零,则三相静止坐标轴系到二相旋转坐标轴系的3s 2r 坐标变换矩阵为
C 3s 2r =
23
co s Ηco s (Η-120°)co s (Η+120°
)-sin Η-sin (Η-120°)sin (Η+120°)(2)?
472? 鞍山科技大学学报 第27卷
所以,分别用p A 8m t 和p B 8m t 替换(2)式中的Η,就可以看到电机A 和电机B 的定子轴系到转子坐标轴系的3s 2r 变换矩阵,而两套转子绕组的坐标变换矩阵就是3s 2s 坐标变换矩阵(三相静止坐标轴系到二相静止坐标轴系的坐标变换矩阵)
.图4 三相变量系统中电压、电流的瞬时值关系
F ig .4 In stan taneou s relati on s of vo ltage and cu rren t in th ree phase system
2.2 转子间电量的关系
两套转子绕组中电压、电流的瞬时值关系如图4所示.
u aA r =u aB r i aA r =-i aB r
u b A r =u c B r i b A r =-i c B r
u c A r =u b B r i b A r =-i b B r
(3)
由坐标逆变换关系,得
u abc A r =C T
3s 2s u dq 0A r i abc A r =C T
3s 2s i dq 0A r
u abc B r =C T
3s 2s u dq 0B r i abc B r =C T
3s 2s i dq 0B r
(4)
求解式(3)和式(4)联立组成的方程组,得到d q 0坐标轴系下转子电量的关系
u dA r =u dB r i dA r =-i dB r
u q A r =-u q B r
i q A r =i q B r
(5)
3 无刷双馈电机的数学模型
根据选定的坐标轴系、坐标变换矩阵以及电感参数矩阵[3],可以获得转子速两相坐标轴系中无刷双
馈电机的标准状态方程形式的数学模型
X α=AX +BU (6)式中X =[i dA i q A i dB i q B i dA r i q A r ]T U =[u dA u q A u dB u q B 0 0]
T
A =C -1D C X
B =
C -1
D C U
C D =
l A
000l m A 00
l A
000l m A
00l B
0-l m B
0000l B
0l mB
l m A
0-l m B
0l A r +l B r
00l m A
0l m B
0l A r +l B r
C U =
10000001000000100000010000000000
00
C X =
-R A p A 8m l A 000p A 8m l m A -p A 8m l A
-R A
00-p A 8m l m A
00-R B p B 8m l B
0p B 8m l m B
00-p B 8m l B
-R B
p B 8m l m B
00000-R A r -R B r
00
-R A r -R B r
本文所采用的d ,q 变量与实际系统三相变量之间的变换阵中具有系数2 3,这时d ,q 两相系统的功率与电磁转矩和原A B C 三相系统的功率与电磁转矩数值上直接相等.电磁转矩方程式为
T e =p A l m A (i q A i dA r -i q A r i dA )+p B l m B (i q B i dB r -i q B r i dB )
(7)运动方程式
J
d 8m
d t
=T e -T m -R 88m (8)
式中:J 为电机系统转动惯量;T m 为负载转矩;R 8为摩擦阻力系数.
4 无刷双馈电机的仿真
近年来,M A TLB 6.1提供的动态系统仿真工具Si m u link 4,在学术和工业领域得到了广泛的应用,
?
572?第4期 陈海朋,等:无刷双馈电机的数学模型和基于Si m u link 4的仿真
用它可以进行动态系统的建模和仿真,也可以很随意地建立各种模型[5].本文利用M A TLAB Si m u link 中的S 函数模块构造无刷双馈电机在d q 0坐标轴系的仿真模块,并利用它和Si m u link 4模块库中的模块构造了无刷双馈电机的仿真模型.仿真框图如图5所示.
图5 无刷双馈电机的仿真模型框图
F ig .5 Si m u lato r of BD FM
在上述模型的仿真研究中,假设摩擦阻力系数R 8=0.05,电机系统的转动惯量J =0.2kgm 2;电机A 的极对
数,定子自感、定子电阻、转子自感、转子电阻和互感分别为p A =2,l A =0.1561H ,R A =2.6508,l A r =0.15557H ,
R A r =2.5218,l m A =0.1451H.电机B 的极对数,定子自
感、定子电阻、转子自感
、转子电阻和互感分别为p B =3,l B =0.1383H ,R B =3.4008,l B r =0.1380H ,R B r =2.92008,l m B =0.1274H.
仿真结果如图6所示.图6中T m 为负载转矩,N m ;U B 为电机B 的定子绕组端电压幅值,V ;f B 为电机B 的定子绕组端电压的频率,H z;其中负号代表反相序.
a .T m =0,U B =1,f B =0
b .T m =0,U B =20,f B =3
c .T m =0,U B =20f B =-3
图6 无刷双馈电机仿真波形图
F ig .6 Si m u lated resu lt of BD FM
5 结 语
本文分析了级联式双馈电机和无刷双馈电机的异同,并且推导了无刷双馈电机在d q 0坐标轴系的数学模型,利用M A TLAB S I M U L I N K 建立了仿真模型,进行了仿真研究
.仿真结果表明,调节电机B 的控制电压的幅值、频率及相序就可以调节电机的转矩和转速.但是从图6b 和图6c 可以看出,电机的动态性能不理想,所以必须找到对电机B 的控制电压的幅值、频率及相序进行有效的调节的方法,以改变其动态性能.参考文献:
[1]ЩАКАРЯЮГ.Асинхронизированныесинхронныемашина[M ].Москва:Щлызоваянаб,1984:159-188.[2]秦晓平,王克成.感应电动机的双馈调速和串级调速[M ].北京:机械工业出版社,1990:3-5.[3]鼓晓,杨向宇,石安乐,等.无刷双馈电机的原理与结构特征[J ].湖南工程学院学报,2002(3):1-4.[4]贺益康.交流电机计算机仿真[M ].北京:科学出版社,1990:98-100.
?
672? 鞍山科技大学学报 第27卷
[5]陈桂明,张明照,戚红雨,等.应用M A TLAB 建模与仿真[M ].北京:科学技术出版社,2001:1-4.
[6]HO PFEN SPER GER B ,A T K I N SON D J ,LA K I N R A .Com b ined m agn tizing flux o rien ted con tro l of the cascaded
doub ly 2fed inducti on m ach ine [J ].IEE P roc 2E lectr Pow er A pp l ,2001(6):354-361.
[7]L I R y 2qi ,W ALLA CE A lan ,SPEE R en .D ynam ic si m u lati on of b ru sh less doub ly 2fed m ach ines [J ].IEEE T ran s on
Energy Conversi on ,1991,6(3):445-451.
M a thema tica l m odel of a brushless double -fed m otor and its
si m ula tion ba sed on Si m ul i nk 4
CH EN H a i 2p eng 1,L I Y an 1,H A N W ei 2
(1.Schoo l of E lectronic and Info rm ati on Engineering,A nshan U niversity of Science and T echno logy,
A nshan 114044,Ch ina;2.A nshan Pow er Supp ly Company,A nshan 114001,Ch ina )
Abstract :B ru sh less doub le 2fed m o to r (BD FM )is a k ind of new m ach ine su itab le fo r m any app licati on s ,and has a b righ t fu tu re .Fo r BD FM ,its m athem atical m odel has been derived ,and its si m u lato r has been con structed under M A TLAB S I M U L I N K ,w h ich p rovides a so lid foundati on fo r fu rther analysing and design ing its con tro l system .
Key words :ascaded doub ly 2fed m ach ine ;m athem atical m odel ;si m u lati on
(Rece ived M arch 11,2004)
待发表论文预报
基于关联规则的网站个性化服务
廖亚莉,王锡钢,战学刚
(鞍山科技大学计算机科学与工程学院,辽宁鞍山 114044)
摘 要:从大量顾客在线购买历史记录中挖掘出有用的关联规则,是一种及时有效的向顾客推出个性化服
务的重要技术.本文主要是对网上书店的顾客在线购买行为进行挖掘分析,采用A p ri o ri 算法[1]找到其中的关联规则,采用支持度过滤方法获取频繁的顾客购买行为模式,提出根据用户的兴趣度和规则的置信度产生相应的推荐候选集,实现网上书店的个性化推荐服务.
小波分析和人工神经网络方法用于重叠色谱峰的解析
孙晓琦1,李井会1,于洪梅1,关永毅2,吴秀红2,王秀云2
(1.鞍山科技大学化学工程学院,辽宁鞍山 114044;2.鞍山钢铁公司化工总厂,辽宁鞍山 114021)
摘 要:将神经网络与小波分析相结合,提出一种利用小波变换提取重叠色谱峰信息,再用人工神经网络解
析的方法,为色谱峰重叠难于分开物质的测定提供一种方法,提高了色谱分析的准确度,并将此方法应用于高效液相色谱中,建立了混合体系中3,42二甲酚和2,52二甲酚同时测定的新化学计量学方法。
?
772?第4期 陈海朋,等:无刷双馈电机的数学模型和基于Si m u link 4的仿真
第19卷一第5期2015年5月一电一机一与一控一制一学一报Electri c 一Machines 一and 一Control 一Vol.19No.5May 2015 一一一一一一绕线转子无刷双馈电机的d -q 轴数学模型 熊飞1,一王雪帆1,一华斌2,一尹传涛2 (1.华中科技大学强电磁工程与新技术国家重点实验室,湖北武汉430074;2.中国船舶重工集团第七一二研究所,湖北武汉430064)摘一要:在阐述绕线转子无刷双馈电机的定子绕组二转子绕组结构和静止a -b -c 轴数学模型的基础上,推导出电机的d -q 轴数学模型三这种电机模型建立在一个任意d -q 轴坐标系下,使用起来方便,消除定子绕组和转子绕组之间互感矩阵的时变系数,缩短计算时间,有利于控制方法的实现,适用于绕线转子无刷双馈电机动态和稳态性能的分析研究三d -q 轴数学模型的参数能根据电机的设计几何尺寸和经验公式得到三通过仿真分析结果和实验数据的对比,验证了任意d -q 轴数学模型的正确性三绕线转子无刷双馈电机任意d -q 轴数学模型的建立为电机性能分析和控制策略的研究奠定基础三 关键词:无刷双馈电机;数学模型;绕线转子;d -q 轴坐标系;仿真分析 DOI :10.15938/j.emc.2015.05.012 中图分类号:TM 301.3文献标志码:A 文章编号:1007-449X(2015)05-0081-09 D -q axis mathematical model of wound-rotor brushless doubly-fed machine XIONG Fei 1,一WANG Xue-fan 1,一HUA Bin 2,一YIN Chuan-tao 2 (1.State Key Laboratory of Advanced Electromagnetic Engineering and Technology,Huazhong University of Science and Technology,Wuhan 430074,China;2.712th Research Institute,CSIC,Wuhan 430064,China)Abstract :Based on the introduction of the stator winding,rotor winding structures and mathematical mod-el under a -b -c axis stationary reference frame of wound-rotor brushless doubly-fed machine (BDFM),the mathematical model of the machine under d -q axis reference frame was proposed.This model was built under arbitrary d -q axis reference frame and convenient for use,time-varying coefficient of the mu-tual inductance matrices between stator winding and rotor winding was eliminated,computational cost was reduced,facilitates future research on the control strategies,and studying and analyzing the machine per-formance in both dynamic and steady-state conditions were applied.The machine parameters can be cal-culated from the design geometry and empirical formula of the machine.Simulation analysis results and experimental data were presented to show the validity of the mathematical model under arbitrary d -q axis reference frame.The establishment of the mathematical model under arbitrary d -q axis reference frame provides the foundation for the study of the performance analysis and control strategy of the machine.Keywords :brushless doubly-fed machine;mathematical model;wound rotor;d -q reference frame;simulation analysis 收稿日期:2010-12-10 基金项目:国家科技支撑计划(2012BAG03B01);国家自然科学基金项目(51207061) 作者简介:熊一飞(1983 ),男,博士,讲师,研究方向为无刷双馈电机的运行理论与设计方法; 王雪帆(1954 ),男,博士,教授,研究方向为新型特种电机及其控制; 华一斌(1977 ),男,博士,高级工程师,研究方向为电力电子与电力传动; 尹传涛(1983 ),男,硕士,工程师,研究方向为电力电子与电力传动三 通讯作者:熊一飞
龙源期刊网 https://www.doczj.com/doc/0511198507.html, 无刷直流电机的建模与仿真 作者:秦超龙 来源:《电脑知识与技术》2013年第05期 摘要:该文在分析无刷直流电机(BLDCM)数学模型和工作原理的基础上,利用Matlab 软件的Simulink和PSB模块,搭建无刷直流电机及整个控制系统的仿真模型。该BLDCM控制系统的构建采用双闭环控制方法,其中的电流环采用滞环电流跟踪PWM,速度环采用PI控制。仿真和试验分析结果证明了本文所采用方法的有效性,同时也证明了验证其他电机控制算法合理性的适用性,为实际电机控制系统的设计和调试提供了新的思路。 关键词:BLDCM控制系统;无刷直流电机;数学模型;MATLAB;电流滞环 中图分类号: TP391 文献标识码:A 文章编号:1009-3044(2013)05-1172-03 随着现代科技的不断发展,无刷直流电动机应用技术越发成熟,应用领域也越发广泛,用户对无刷直流电动机使用增多的同时,对其控制系统的设计要求也变得越来越高。包括低廉的设计和搭建成本、短的开发周期、合适的控制算法、优良的控制性能等。而科学合理的无刷直流电动机控制系统仿真模型的建立,对控制系统的直观分析、具体设计,快速检验控制算法,降低直流电机控制系统的设计成本,拥有十分重要的意义。 直流无刷电动机利用电子换向原理和高磁性材料,取代了传统的机械换相器和机械电刷,解决了有刷直流电动机换向器可维护性差和较差的可靠性的致命缺点,使得直流电动机的良好控制性能得到维持,直流电动机得到更好的应用。伴随着如今功率集成电路技术和微电子技术的发展,控制领域相继出现了大量无刷直流电动机专用驱动和控制芯片,解决高性能无刷电动机驱动控制问题所提出的解决方案也变得更加丰富和科学,无刷直流电机在控制领域显示出前所未有的广阔应用前景[1]。 通过无刷直流电动机控制系统的仿真模型来检验各种控制算法,优化整个控制系统的方法,可以在短时间内得到能够达到预期效果的控制系统。在对无刷直流电机电流滞环控制和数学模型等分析的基础之上,可以利用Simulink中所提供的各种模块,构建出BLDCM控制系统的仿真模型,从而实现只利用Simulink中的模块建立BLDCM控制系统仿真模型。通过对实例电机的仿真,可以得到各类仿真波形,从而验证了仿真模型的有效性和正确性,数学模型的有效性及控制系统的合理性也得到了验证。 1 无刷直流电机的数学模型 本文采用两相导通三相六状态的无刷直流电动机来分析无刷直流电动机的数学模型[2-3]。 无刷直流电动机的感应电动势为梯形波,电流为方波。考虑到分析的方便、无刷直流电动机的特点,该文直接利用电动机本身的相变量建立物理模型,假定:
双馈变速风电机组模型的仿真分析 在常用的变速恒频风力机种类中,双馈异步电机的风力机有比较大的技术优势和市场空间。文章对使用双馈异步风力发电机的风力机组的输出性能做出研究与分析,并使用MATLAB进行仿真模拟。文章的主要工作包含以下两个部分:第一部分是在风速波动条件下,分别通过电压模式控制和无功功率模式控制,研究分析风电机组的输出特性变化。第二部分是在电网故障条件下,分别通过电压模式控制和无功功率模式控制,研究风电机组输出特性变化。 标签:风力发电;双馈风电机组;动态模型;MATLAB 引言 能源的发展对国民的经济有着非常重要的作用。常规能源主要以化石能源为主,在全球工业飞速发展的时代,产生极具经济效益的同时,化石性燃料使用的程度也达到了空前。化石性燃料的使用对大气造成了严重的污染,对人类的生存环境造成了重大的破坏;此外,化石性燃料隶属一次性能源,总有消耗完结的时候。经济生活中的国策,能源对人类的经济与社会的发展的限制和对资源环境的影响也越来越明显[1]。 虽然各种类新能源中以太阳能的储量最为丰富[2],但是利用太阳能直接进行光伏发电目前仍有一些不能解决的技术问题。所以风力对于我们来说是一个比较理想的替代能源。双馈变速恒频风力发电机目前作为风力发电系统中使用的主要机型,其中永磁直驱式变桨距和双馈异步式的变速恒频风电机组已经成为兆瓦级风电机组的主要技术形式[3]。对上述风力机组的入网运转调控措施的研究是风能发电系统能够广泛应用的基础。双馈风力发电机多采用双PWM变换器为转子提供励磁电流[4]。转子侧变换器控制策略主要有两大类,一类是基于矢量控制的间接功率控制[5-6],另一类是直接功率控制[7-8]。我们国家从“十五”时期已经对双馈异步发电机风电机组理想电网条件下的运转控制进行了比较为深入剖析[9]。实际工程中电网展示出不稳定特点,电压剧降则是一种非常遇见情况,研究这种故障下DFIG的行为、特性,提高风电机组对这种故障的适应能力,已成为目前国内外研究的热点。 1 双馈变速风电机组 1.1 双反馈变速风电机的整体设计 风力发电的种类非常多,按照其结构,控制原理,运行方式可以有不同的分类。根据转速性质进行划分,则可以分为恒速机组和变速机组两类。变速的风电机组又可以分为连续变速的风电机组和不连续的风电机组两种类型。根据发电机类型可以分为以同步发电机(包括以电激磁的同步机和以永磁体激磁的同步机)和以感应发电机(包括普通感应机,双馈感应机)。
同步电机数学模型的建立和仿真 :包邻淋 专业:控制工程 学号:1402094
摘要 (3) 1同步电机数学模型的建立 (4) 1.1模型的导出思路 (4) 1.2变量置换用的表达式 (5) 1.4电机实用模型 (6) 1.5电机实用模型的状态空间表达式 (8) 1.6电机模型参数的确定 (10) 2 同步电机数学模型的仿真 (13) 2.1同步发电机仿真模型 (13) 2.2不同阶次模型的仿真分析 (14) 参考文献 (17)
摘要 一般发电机存在临诸多问题,建立精确地描述同步发电机的数学模型是十分必要的[1]。电力系统数字仿真因具有不受原型系统规模和结构复杂性限制,能保证被研究系统的安全性,且具有良好的经济性、方便性等优点。 常用的同步发电机数学模型由同步发电机电路方程及转子运动方程两部分组成。同步发电机电路方程又分为基本方程和导出模型两类[4]。对于不同的假设条件,同步发电机模型可作不同程度的简化,因此同步发电机的导出模型也有不同的形式。同一假设条件下,不同的同步发电机数学模型,其主要区别在于电机的转子绕组数,有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,则称之为转子7阶模型[5]。如果转子绕组数减少,则发电机方程组的阶数也相应减少。 本文通过MATLAB/simulink进行仿真计算,比较采用不同的同步发电机模型时,对系统的稳定性分析的影响。在此基础上提出在不同情况下进行电力系统仿真计算选取同步发电机数学模型的方法。
1同步电机数学模型的建立 1.1模型的导出思路 由于定转子间的相对运动,基于空间静止不动的三相坐标系所建立的原始方程,磁链方程式中会出现变系数,这对方程组的求解和模型的建立造成了很大的困难。现在通用的方法是对原始方程做d q变换(又称为派克变换),将原方程从a b c三相静止不动坐标系变为与转子相对静止的d q坐标系。 基本方程中有d,q,f,D,Q5个绕组的电压方程和磁链方程,外加2个转子运动方程,若设,则原方程为5阶,若转子运动方程为,;所含变量为,。。在化为实用模型时 和保留,用取代,再用5个磁链方程消去3个转子电流,以及2个定子磁链,而 则用实用变量代替。 经过上述思路导出的实用模型,除了以及引入的等效实用变量之外方程中系数都是同步电机技术参数中的电抗和时间
无刷双馈电机控制原理 一、设备名称 1250KW无刷双馈电机低压变频控制系统 二、设备用途 本设备用于电机厂1250kw无刷双馈电机低压绕组测变频控制 三、现场技术条件及技术参数 1、环境条件 ·工作环境温度:0--40摄氏度 ·存储环境温度:-25-- 55摄氏度 ·相对湿度:<95%(无凝露) ·环境等级/ 有害化学物质:Class 3K3,符合标准 EN 60721-3-3 ·有机体 / 生物体影响因素:Class 3B1,符合标准 EN 60721-3-3 ·污染等级:2 (EN 61800-5-1) 2、电源 ·660 — 690 V 3 AC, ±10 % (-15 % < 1 min) ·不平衡度±5 % 3、无刷双馈同步电动机技术参数 3、1电机型号:TWS630-8 3、2额定功率:1250KW 3、3额定转速:743r/min 3、4满载效率:95、1% 3、5工频绕组额定电压:6kV 3、6工频绕组额定频率:50Hz 3、7工频绕组额定电流; 100A
3、8工频绕组功率因数:0、84 3、9变频绕组额定电压:690V 3、10变频绕组额定频率: 25Hz 3、11变频绕组额定电流; 528A 3、12变频绕组功率因数: 0、8 4.变频调速装置技术参数 4、1额定功率:450 kW 4、2额定输入电压: 690V 4、3额定输入电流:598 A 4、4额定输入频率:50 Hz 4、5额定输出电压:690 V 4、6额定输出电流:560 A 4、7额定输出频率:25 Hz 5、变频器供电变压器技术参数 5、1产品型号及名称_ZTSFG(H)-800-6__ 5、2额定容量___ _800______kVA 5、3高、低压额定电压___6___ / _0、69__ kV 5、4高压分接范围_____±2×2、5__ _% 5、5短路阻抗________6________% 5、6相数________3________ 5、7绕组数________3________ 5、8频率________50_______Hz 5、9使用条件 5、9、1海拔________1000_____m 5、9、2环境温度________-10~40__℃
基于MATLAB/SIMULINK的无刷直流电动机系统仿真 0引言 无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。 1无刷直流电机仿真模型 本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图 以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。 图2 无刷直流电机控制系统仿真模型框图 1.1电动机本体模块 在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,
i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。 图3 电机本体模块 1.反电势求取模块 本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
第27卷第4期2004年8月 鞍山科技大学学报 Jou rnal of A n shan U n iversity of Science and T echno logy V o l.27N o.4 A ug.,2004无刷双馈电机的数学模型和 基于Si m u link4的仿真 陈海朋1,李 岩1,韩 伟2 (1.鞍山科技大学电子与信息工程学院,辽宁鞍山 114044;2.鞍山供电公司,辽宁鞍山 114001) 摘 要:无刷双馈电机是一种在许多方面都有着很好应用前景的新型电机.本文重新推导了无刷双馈电机的数学模型,并在M A TLAB S I M UL I N K环境下建立了仿真模型,为进一步构成控制系统,进行系统分析与设计奠定了基础. 关键词:级联式双馈电机;数学模型;仿真 中图分类号:TM301.2 文献标识码:A 文章编号:167224410(2004)0420273205 双馈电机又称异步化同步电机[1],与变频器一起可以实现机电系统的柔性连接,对提高电力系统的稳定性有重要意义.双馈电机可以在各种负荷下实现大范围的无级调速,将其用于风机、泵类负载时,具有显著的节能效果,同时也大大降低了所需变频器的功率.在可调速的电气转动方式中,这种调速方式的效率很高[2].特别是无触点双馈电机具有良好的应用前景. 目前国内外对无刷双馈电机的研究已从对电机结构的改进阶段发展到建立比较准确的实用模型阶段.可以看出,现有的无刷双馈电机的数学模型大多建立在d q0坐标轴系基础之上[3],并且在把电机内的电量折算到d q0坐标轴系时,往往取其综合矢量方向为q轴方向,这与当前教材不一致.而且,以往对无刷双馈电机的仿真程序大部分是用C或FO R TAN语言编写,这些语言对编制和调试矩阵运算、微分方程解法等程序很不方便. 针对上述情况,本文重新推导了无刷双馈电机的数学模型.并且以该数学模型为基础,利用M A TALB S I M U L I N K中的S函数和电源模块集(Pow er system b lock set),建立了无刷双馈电机的仿真模型,实现了该仿真模型与电源模块之间的耦合. 1 无刷双馈电机与级联式双馈电机的工作原理 级联式双馈电机(CD FM)与无刷双馈电机(BD FM)的结构相似,都相当于2台绕线式异步电机串级而成,具有2套分离的定子绕组,2套转子绕组.只是无刷双馈电机相当于2台绕线式异步电机同轴串级而成,并且2套转子绕组反相序联接,其结构如图1所示. 为分析方便,假定无刷双馈电机由极对数分别为p A,p B的绕线式异步电机A和B组成.电机A的定子直接与三相工频电网相连,电机内部磁场相互作用关系如图2所示.图中f A,f B分别为两定子绕组的供电频率,H z;f r A,f r B分别为两转子绕组感应电势的频率,H z;n为转子转速,r m in. 稳态运行时,无刷双馈电机的转速为 n=60(f A-f B) (p A+p B)(1) 收稿日期:2004203211. 作者简介:陈海朋(1978-),男,黑龙江兰西人,2001级研究生.
电机数学模型 以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。为了便于分析,假定: a)三相绕组完全对称,气隙磁场为方波,定子电流、转子磁场分布皆对称; b)忽略齿槽、换相过程和电枢反应等的影响; c)电枢绕组在定子内表面均匀连续分布; d)磁路不饱和,不计涡流和磁滞损耗。 则三相绕组的电压平衡方程可表示为: 错误!未找到引用源。(1) 式中:错误!未找到引用源。为定子相绕组电压(V);错误!未找到引用源。为定子相绕组电流(A);错误!未找到引用源。为定子相绕组电动势(V);L为每相绕组的自感(H);M为每相绕组间的互感(H);p为微分算子p=d/dt。 三相绕组为星形连接,且没有中线,则有 错误!未找到引用源。(2) 错误!未找到引用源。(3) 得到最终电压方程: 错误!未找到引用源。(4) e c c 图.无刷直流电机的等效电路 无刷直流电机的电磁转矩方程与普通直流电动机相似,其电磁转矩大小与磁通和电流幅值成正比 错误!未找到引用源。(5) 所以控制逆变器输出方波电流的幅值即可以控制BLDC电机的转矩。为产生恒定的电磁转矩,要求定子电流为方波,反电动势为梯形波,且在每半个周期内,方波电流的持续时间为120°电角度,梯形波反电动势的平顶部分也为120°
电角度,两者应严格同步。由于在任何时刻,定子只有两相导通,则:电磁功率可表示为: 错误!未找到引用源。(6) 电磁转矩又可表示为: 错误!未找到引用源。(7) 无刷直流电机的运动方程为: 错误!未找到引用源。(8) 其中错误!未找到引用源。为电磁转矩;错误!未找到引用源。为负载转矩;B为阻尼系数;错误!未找到引用源。为电机机械转速;J为电机的转动惯量。 传递函数: 无刷直流电机的运行特性和传统直流电机基本相同,其动态结构图可以采用直流电机通用的动态结构图,如图所示: 图2.无刷直流电机动态结构图 由无刷直流电机动态结构图可求得其传递函数为: 式中: K1为电动势传递系数,错误!未找到引用源。,Ce 为电动势系数; K2为转矩传递函数,错误!未找到引用源。,R 为电动机内阻,Ct 为转矩系数;T m为电机时间常数,错误!未找到引用源。,G 为转子重量,D 为转子直径。基于MATLAB的BLDC系统模型的建立 在Matlab中进行BLDC建模仿真方法的研究已受到广泛关注,已有提出采用节点电流法对电机控制系统进行分析,通过列写m文件,建立BLDC仿真模型,
双馈感应风电机并网运行的简单仿真 学号:201521401036 姓名:刘香 学院:电气工程 班级:s1551 摘要:风电场并网运行时会对电网产生一定影响。本文首先阐述了主体双馈异步发电机的 基本情况;详细阐明了风速模型的四种类型及其独立的仿真;感应发电机的并网运行;重点是基于Matlab/Simulink 软件平台,建立风电场与电力系统的模型,在电压调节模式下,由风速变化、电压暂降等双馈感应风电机并网引起的常见故障进行仿真试验。 关键词:双馈感应风力机;并网;Matlab/Simulink ; 1 前言 风力发电机组是实现将风能转换为电能的能量转换系统,它包括风力机和风力发电机。经风力机风轮将风能转换成机械能;由于发电机转子的转动使机械能转化为电能。本文中的双馈异步发电机(DFIG )是变速恒频型,电力电子频率变换设备是交-直-交型变频器。双馈异步发电机的定子绕组与电网直接相连,转子绕组通过频率变换器供给频率可调的交流励磁电流。 2 风速模型 风速为风力机提供原动力,风速模型的建立不受整个风电机组模型其它环节的影响,可以独立进行。可以分为四分量模型:基础风、阵风、渐变风、随机风。 2.1基础风模型 基本风对风力机的影响表现在反映风力机输出的额定功率大小,可以由风电场所测得的威布尔分布参数近似表示. ⑴ 式(1)中的A 、K 表示威布尔分布的尺度参数和形状参数,??? ?? K + Γ11代表伽马函数。 基本风风速为 12.5m/s ,仿真时间为 0~10s ,基本风始终存在,MATLAB 仿真程序见附 录1,仿真图如图1所示。 图 1 基本风仿真曲线 2.2阵风模型 风速突然变化的特性可以用阵风模型来表示,当风力机遇到突然变化的干扰可以用它来 表示。
2.2 无刷直流电机的数学模型 在本文中,以两极三相无刷直流电机为例来说明其数学建立模型的过程。电机定子绕组为Y 型联接,转子采用内转子结构,3个霍尔元件在空间相互间隔120°对称放置。在此结构基础上,假设电机的磁路不饱和,不计涡流损耗、磁滞损耗及电枢反应;忽略齿槽效应;驱动系统中,整流逆变电路的功率管和续流二极管均为理想开关器件错误!未找到引用源。。 2.2.1 定子电压方程 由以上的假设条件,无刷直流电机每相绕组的相电压由电阻压降和绕组感应电势两部分组成,其定子电压平衡方程为 ???? ? ?????+????????????????????+????????????????????=??????????c b a c b a c cb ca bc b ba ac ab a c b a c b a c b a e e e i i i L L L L L L L L L dt d i i i R 0 0R 000R U U U (2-1) 式(2-1)中,a e 、b e 、c e 为各相定子反电动势,a i 、b i 、c i 为各相定子电流,a U , b U , c U 为定子各相电压,a R ,b R ,c R 为定子各相绕组电阻,a L ,b L ,c L 为定子各相绕组自感,ab L ,ac L ,ba L ,bc L ,ca L ,cb L 为定子间各相绕组的互感,由于无刷直流电机的转子为永磁体。假设无刷直流电机三相绕组对称,忽略磁阻间的影响,则可以认为定子各相绕组间互感为常数,即s c b a L L L L ===, R R R R c b a ===,M L L L L L L cb ca bc ba ac ab ======。则式(2-1)改写为 ???? ??????+????????????????? ???+????????????????????=??????????c b a c b a s s s c b a c b a e e e i i i L M M M L M M M L dt d i i i R 0 0R 000R U U U (2-2) 由0i i i c b a =++,0Mi Mi Mi c b a =++,代入式(2-2),整理可得 ?? ?? ??????+????????????????????+????????????????????=??????????c b a c b a c b a c b a e e e i i i L 000L 000L dt d i i i R 0 0R 000R U U U (2-3) 式(2-3)中M L L s -=。图2-3虚线框部分所示即为电子电枢部分等效电路。 2.2.2 反电势动方程 在物理学当中,在磁场中单根导体切割磁力线运动产生的电动势e 为 Blv e = (2-4) 其中,B 、l 分别为磁场强度和导体在磁场中运动有效长度,v 为导体在垂直于
双馈电机控制模型的建立与仿真 发表时间:2014-12-16T11:35:18.890Z 来源:《价值工程》2014年第7月下旬供稿作者:金菁 [导读] 据风能特性,现将风速模型分解为以下两个部分:平均风速———周期大于10min,脉动风速———周期极短。Establishment and Simulation for the Control Model of Double Fed Motor 金菁JIN Jing曰刘青松LIU Qing-song(嘉兴学院,嘉兴314001)(Jiaxing University,Jiaxing 314001,China) 摘要院本文通过对风速的分解,建立了实际风速的综合模型,在风机动态特性分析的基础上,建立了双馈电机及控制系统的仿真模型。所建立的模型具有通用性,便于Matlab/Simulink 的仿真分析。 Abstract: This paper, which is based on the analysis of wind speed, established a comprehensive model of the actual wind speed. Andaccording to the analysis of dynamic characteristics of wind generators, the simulation model of the double fed motor and control system areset up. The model is so general that it is easy to analysis and simulation data in Matlab/Simulink. 关键词院双馈电机;风速;控制;建模Key words: double fed motor;wind speed;control;modeling中图分类号院TM303 文献标识码院A 文章编号院1006-4311(2014)21-0047-020 引言双馈电机是目前开发的新型交流电机,它兼有异步电机和同步电机的优点。与其相应的风力发电技术,是一种具有良好应用前景的风力发电技术。它可以优化风力发电机的运行条件,并使发电机组与电网之间实现良好的柔性连接。由此,可在提高风能利用率和转换效率的同时使发电机顺利实现并网操作[1]。 1 风速模型风能是一种洁净的可再生能源,然而能量密度较低,因此需较大的风轮获取能量。此外,风能随海拔、时间、地点的改变而改变。它的变化性和随机性更使其不易被利用。因此,为使得风力发电机组有稳定的功率输出,对风速的分析和预测以及建模是不可或缺的。 据风能特性,现将风速模型分解为以下两个部分:平均风速———周期大于10min,脉动风速———周期极短。最终作用在风力机上的模拟风速为上述两种风速之和。与两种风速相应的预测称为短时风速预测和中长期风速预测。 对短期风速的准确预测有助于减轻因风速波动产生的对电网不利的影响,还可优化电网调度部门的调度计划;对中长期风速的准确预测则有助于设计规划风电场规模,制订长远发展目标[2]。 对于变动频繁的短期风速,可利用其特性———随机性、时间相关性、空间相关性———拟定符合其波动情况的状态方程,经过一系列的算术变换得出符合实际的短时风速序列。其具体步骤大致如下:淤测得风电场数据并将其分解。 于对分解得到的不同成分建立不同预测模型。 盂将各个预测模型得到预测值叠加成最终结果。 榆将由盂得到的结果作为样本,与所测得的数据整合,得到新的样本。 虞再将所得样本分解成不同频率分量及其对应项。重复步骤于~盂。 愚综和步骤榆与虞得到短期风速预测模型。 相较于短时风速,中长期风速的变化缓慢,可将其分解为不同的分量。对应不同分量建立不同的有关于时间t的方程。综上所述,得到可用风速的综合模型:
无 刷双馈发电机风力发电系统的建模与控制 52 收稿日期:2009-01-09 改稿日期:2009-02-10 无刷双馈发电机风力发电系统的建模与控制 刘广忱,王生铁,刘瑞明,张润和 (内蒙古工业大学,内蒙古呼和浩特010051) 摘 要:从转子参考坐标系dq 模型出发,研究功率绕组和控制绕组双同步M T 坐标系下的无刷双馈发电机(BD 2 FG )数学模型,建立了包括BDFG 、风力机及机械传动链的风力发电系统数学模型。根据风力机和BDFG 的特性,采 用定子功率绕组磁链定向的矢量变换控制技术,给出了一种功率控制策略。该策略通过控制发电机控制绕组的交流励磁,实现BDFG 风力发电系统有功、无功功率的解耦控制和最大功率追踪控制(MPPT )。仿真结果验证了所提出建模与控制方案的正确性和有效性。 关键词:风力发电;无刷双馈电机;最大功率追踪;矢量控制 中图分类号:T M 315 文献标识码:A 文章编号:1004-7018(2009)09-0052-05 M odeli n g and Con trol of W i n d Power Genera ti on Syste m w ith Brushless D oubly -Fed Genera tor L IU Guang -chen,WAN G Sheng -tie,L IU R ui -m ing,ZHAN G R un -he (I nnerMongolia University of Technol ogy,Hohhot 010051,China ) Abstract:The mathe matical model of brushless doubly -fed generat or (BDFG )in both power winding and contr ol winding synchr onous reference fra mes M T was derived fr om the model in r ot or reference fra me dq ,and the model of BDFG -based wind power syste m which consists of BDFG,wind turbine and mechanical drive train was established in this paper .Based on the characteristic analysis of wind turbine and BDFG,a power contr ol strategy for BDFG -based wind power sys 2te m was devel oped by means of stat or power winding flux orientati on contr ol technol ogy,which was able t o achieve the de 2coup ling regulati on of the active and reactive power and the MPPT contr ol by contr olling the contr ol winding AC excitati on .The si m ulati on results verify the correctness and validity of the modeling and contr ol sche me p r oposed in the paper . Key words:wind power generati on;brushless doubly -fed generat or (BDFG );maxi m u m power point tracking (MPPT );vect or contr ol 0引 言 并网型风力发电系统中,要求风电的频率与电网频率保持一致,即频率保持恒定。实现发电机恒 频的方式有恒速恒频和变速恒频两种。恒速恒频是指保持发电机转速不变,从而得到恒频电能;变速恒频是指发电机转速变化时,通过电力电子装置的得到恒频电能。实现变速恒频发电的方式很多,目前,交流励磁双馈发电机(以下简称DF I G )系统应用较为广泛,但是DF I G 仍然有滑环和电刷的存在,因此不大适合在比较恶劣的环境下运行。而无刷双馈电动机(以下简称BDFG )取消了滑环电刷,可以运行在比较恶劣的环境中。同时,BDFG 与DF I G 具有相同的优点:1)采用矢量控制可使风电系统实现有功、无功解耦调节及最大功率追踪(以下简称MPPT ),从而获得优良的发电性能;2)变换器容量仅为系统容量的一部分,降低了系统成本。因此, BDFG 风力发电系统是变速恒频风力发电领域的发 展趋势之一 [1-5] 。 目前,有关BDFG 风力发电系统的研究主要集中在BDFG 的结构及性能、等效电路及数学模型和控制策略等方面 [1-3,6-7] 。文献[8-10]分别采用矢 量控制、模糊控制和滑模变结构控制对BDFG 有功、无功功率控制进行了研究。文献[11-12]对采用矩阵式变换器的BDFG 风力发电系统进行了研究。文献[11,13]对BDFG 最大功率追踪控制进行了研究。本文主要根据风力机和BDFG 的特性,建立包括BDFG 、风力机及机械传动链的BDFG 风力发电系统的数学模型,给出结合有功、无功功率解耦控制和MPPT 控制的功率控制策略,并进行仿真研究。 1BD FG 风力发电系统数学模型 1.1系统原理 BDFG 的基本结构是一个定子、一个转子和一 套公共磁路,如图1所示。定子上装有两套三相绕组,一套为功率绕组,极对数为p p ,与工频电网直接
异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统[1]。在研究异步电机的多变量数学模型时,常作如下假设: (1)三相绕组在空间对称互差 120,磁势在空间按正弦分布; (2)忽略铁芯损耗; (3)不考虑磁路饱和,即认为各绕组间互感和自感都是线性的; (4)不考虑温度和频率变化对电机参数的影响。 异步电机在两相静止坐标系上的数学模型: 仿真的基本思想是利用物理的或数学的模型来类比模仿现实过程,以寻求过程和规律。在实际过程中,系统可能太复杂,无法求得其解析解,可以通过仿真求得其数值解。计算机仿真是利用计算机对所研究系统的结构、功能和行为以及参与系统控制的主动者——人的思维过程和行为,进行动态性的比较和模仿,利用建立的仿真模型对系统进行研究和分析,并可将系统过程演示出来。 系统仿真软件MATLAB 不但在数值计算和符号计算方面具有强大的功能,而且在计算结果的分析和数据可视化方面有着其他类似软件难以匹敌的优势。界面友好,编程效率高,扩展性强。MATLAB 提供的SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。SIMULINK 的目的是让用户能够把更多的精力投入到模型设计本身。它提供了一些基本的模块,这些模块放在浏览器里面,用户可以随时调用。当模型构造之后,用户可以进行仿真,等待结果,或者改变参数,再进行仿真。异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,其动态和静态特性都相当复杂。以下将介绍用SIMULINK 如何来建立三相异步电机的计算机仿真模型,为以后的系统仿真做好准备。 经过三相静止/两相静止坐标变换及两相旋转/两相静止坐标变换,可得异步电机在两相静止坐标系上的数学模型。 电压方程: ?????? ? ???????????????????+--+++=??????????????βαβαβαβαωωωωr r s s r r r m m r r r r m r m m S m S r r s s i i i i P L R L P L L L P L R L P L P L P L R P L P L R u u u u 22110000
万方数据
张会焱:无刷直流电动机启动过程的Madab仿真 式中.电磁转矩为 电磁功率为 乙=告 乙=乞之+%‘+ec‘ (8) (9) 2运行状态分析 在本文中,无刷直流电动机电枢绕组与逆变器的联接形式采用三相导通三相星形六状态的方式。 如图2所示。假设在任意时刻开关线路的上桥臂和下桥臂有一个或者两个晶体管导通,即三相绕组的通电顺序依次为A+B屯+、A+B屯一、A+B+c一、A—B+c一、A’B屯+、A。B屯?(180。导通型)字母上标为加号代表电流流进绕组,字母上标为负号代表电流流出绕组。当电流为A+B_c+通电时,转子磁极位置如下图3中a所示,Fs为定子绕组合成磁动势,FN为转子永磁体磁动势,0为转子磁极位置角(O=o一训3)。当永磁体位于起始位置时.A、C两相电流流进绕组,而B相电流流出绕组。此时电流流通 的路径为:电源正极一V。管—呱相绕组一B相绕组—-V6管一电源负极;还有,电源正极一Vs管—屺相绕组一B相绕组—V。管一电源负极。FS和R相互作用,使转子 顺时针旋转。当转子顺时针旋转训3到达终止位置时,开始进入电流为A+B屯‘通 电的状态,如图3中b所示。此时电流流通的路径为:电源正极一V,管一A相绕 组一B相绕组一V6管一电源负极;还有,电源正极一VI管—A相绕组川相绕 组一V:管一电源负极。Fs和FN相互作用,使转子继续顺时针旋转。如此六种状态循 环往复。阁在电角度0的各个区间内V。_6管的导通顺序如表l。 一个周期2霄内的运行状态图如图3所示。O为转子磁极位置角(0=0一们是 第一个状态) O与六个边界值的差值作为他hy的输入信号,通过逻辑转换得到逆变器的输入信号S。.6 图4脉冲序列产生模块 六个rehy的输出分别是下表的l、2、3、4、5、6,S-^6的逻辑值如表2 表2脉冲信号逻辑真值表 图2无刷直流电动机的基本电路结构 表1三相电流在晶闸管中的流向 电劁晓O 棚捌3 i钾 3纠3 1 A ^^A^A导习蕊守 BBBBBBC CCC C C Ⅵ导通 导通导丑%导粗 导通导遇Ⅵ导逼 导迥导逼Ⅵ导逼 导通导通、‘导遗导通 导通碥 导逼 导通 导遇 删c田d 明f 图3一周期内磁势和电流方向的变化 由5逆变器等效电路 O 3 PWM逆变器的通用数学模型 三相全桥逆变器有大功率晶体管(CTR)、功率场效应管(MOSFET)、绝缘栅双 极型晶体管(IGBT)等器件,这些器件一般由6个开关管组成。在仿真过程中,可以用六个理想的开关S;(i.1,2,3,4'5,6)来代替,其等效的拓扑结构如图5所示。 由于同一桥臂的两个开关管不能同时导通,可设第i个开关管导通时,Si_1;否则Si=O。同时假设三相参数完全对称,ok产k L,R.:R妒k=R,则由逆变器输出端至直流电源中性点的电压为 Iu0=s计%/2{【,k=s6}ud,2 K=sn讥/2 (10) 其中开关函数。 本拦目贲任编辑:唐一乐 -?-?-人工■奠夏识射陵术?-2707 万方数据
目录 1 设计意义及要求 (3) 1.1设计意义 (3) 1.2设计要求 (3) 2 异步电动机动态数学模型 (4) 2. 1 异步电动机动态数学模型的性质 (4) 2. 2 异步电动机的三相数学模型 (5) 2.3坐标变换 (7) 2. 3.1坐标变换的基本思路 (7) 2. 3.2三相 - 两相变换( 3 / 2 变换) (7) 2. 3.3静止两相 - 旋转正交变换( 2 s / 2 r 变换) ...................................... 2.4状态方程 (10) 3 模型建立 (12) 3. 1 ACMo t o r 模块 (12) 3.2坐标变换模块 (13) 3. 2.1 3/ 2 t r a n s f o r m 模块 (13) 3. 2.22s/2rtransform 模块 (13) 3. 2.32r / 2s t r an s f or m 模块 (14) 3. 2.4 2/ 3 t r a n s f o r m 模块 (15) 3. 2.5 3/ 2 r t r a ns f o r m 模块 (16) 3.3仿真原理图 (17) 4 仿真结果及分析 (20) 5 结论 ........................................................ 参考文献..................................................... 摘要 对一个物理对象的数学模型,在不改变控制对象物理特性的前提下采用一定的变换手段,可以获得相对简单的数学描述,以简化对控制对象的控制。对异步电机的数学分析也不例外,在分析异步电机的数学模型时主要用到的是坐标变换。