民机电传飞行控制系统体系结构研究
王 永
中国一航618所 陕西西安
摘要本文研究了先进民用飞机电传飞行控制系统的体系结构,分析了A320/A340 、Boeing 777、A380的电传飞行控制系统的布局、余度结构、控制策略。在分析国外民机电传飞控系统的基础上本文还针对我国“大型飞机”给出了电传飞控系统方案。
关键词电传、飞行控制、余度、飞控计算机、舵机
1 引 言
电传飞行控制系统是民用飞机发展的重要里程碑,它可减轻飞行员工作负担、提高乘座舒适性、优化飞机设计。空客和波音都以电传飞行控制系统来改善飞机效能及增强市场商业竞争能力,取得了巨大成功。随着我国经济的发展,民用航空工业将成为21世纪的一个新经济增长点。国务院总理温家宝在十届全国人大四次会议上宣布,中国将在“十一五”期间适时启动大型飞机研制项目。为适应日益增长的国内外市场对民用飞机的需求,应当不失时机地大力发展民用飞机电传控制技术的研究。
2 A320飞机电传飞控系统分析
2.1 概述
A320是第一架采用电传飞控系统的民航客机。她是根据协和飞机模拟电传20多年的使用经验及A300、A310数字控制器(用于扰流片)使用经验的基础上设计成功的。
2.2 A320飞机飞控体系结构
A320的电传飞行控制系统的计算机采用了7ⅹ2的结构,主要操纵面布局2台舵机,主备工作,保证因飞控系统故障而引起飞机失事的概率小于10-9/飞行小时,方向舵和水平安定面的机械操纵提供了安全操纵飞机着陆的能力。整个飞控系统采用非相似余度设计并利用了控制面的气动冗余。
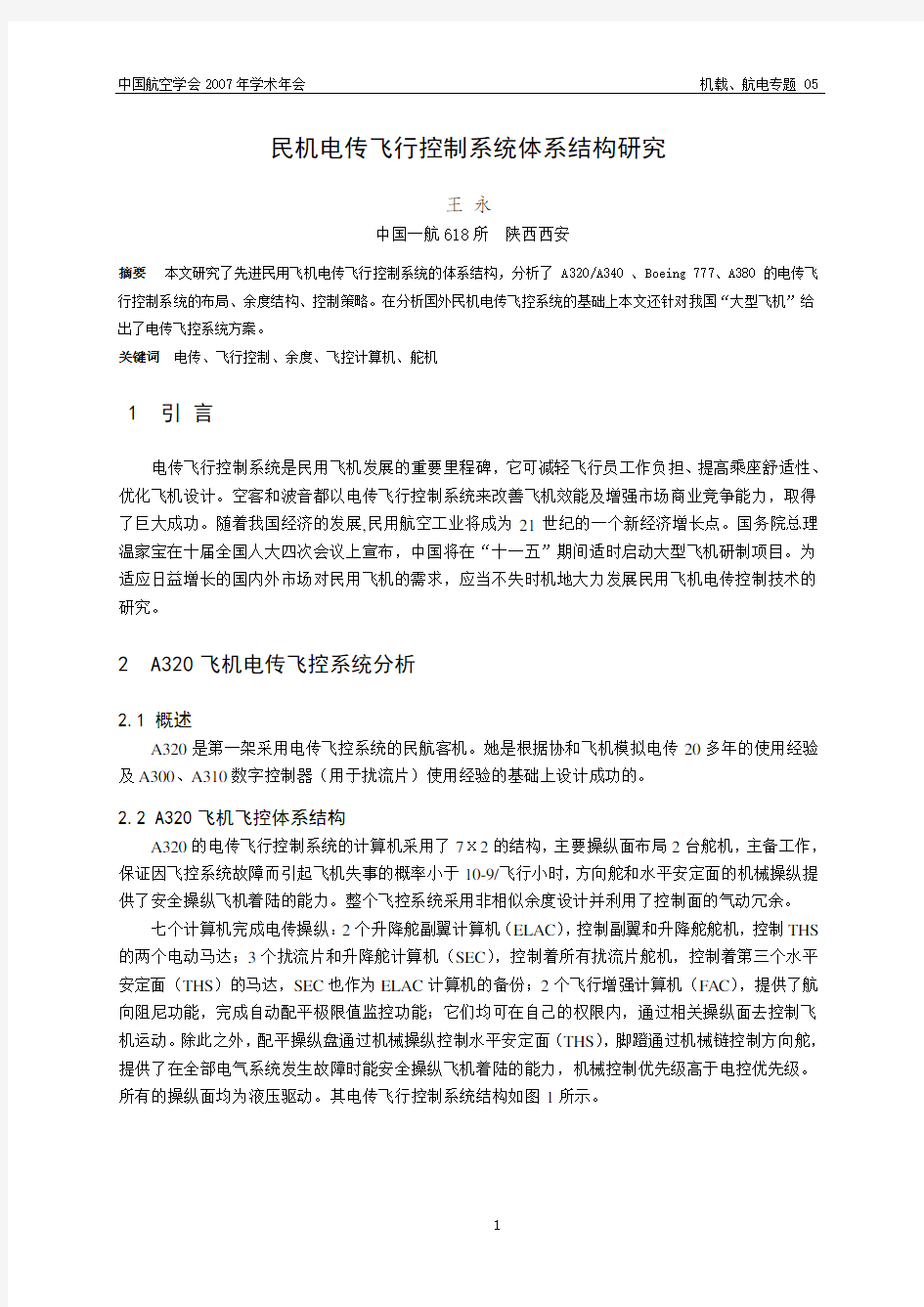
七个计算机完成电传操纵:2个升降舵副翼计算机(ELAC),控制副翼和升降舵舵机,控制THS 的两个电动马达;3个扰流片和升降舵计算机(SEC),控制着所有扰流片舵机,控制着第三个水平安定面(THS)的马达,SEC也作为ELAC计算机的备份;2个飞行增强计算机(FAC),提供了航向阻尼功能,完成自动配平极限值监控功能;它们均可在自己的权限内,通过相关操纵面去控制飞机运动。除此之外,配平操纵盘通过机械操纵控制水平安定面(THS),脚蹬通过机械链控制方向舵,提供了在全部电气系统发生故障时能安全操纵飞机着陆的能力,机械控制优先级高于电控优先级。所有的操纵面均为液压驱动。其电传飞行控制系统结构如图1所示。
1
图1 A320飞机电传飞行控制系统结构
2.3 飞机三轴操纵
2.3.1 俯仰轴
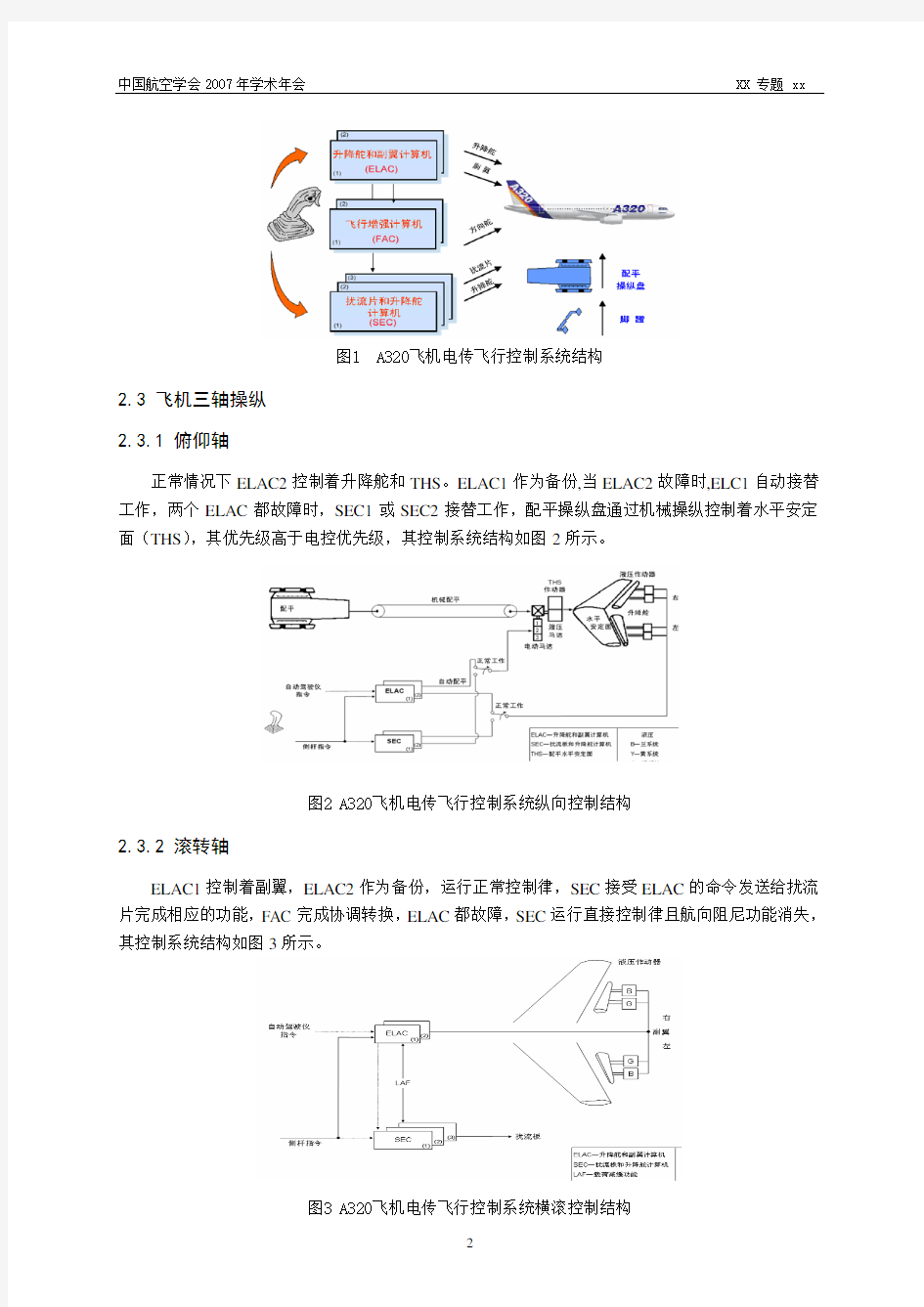
正常情况下ELAC2控制着升降舵和THS。ELAC1作为备份,当ELAC2故障时,ELC1自动接替工作,两个ELAC都故障时,SEC1或SEC2接替工作,配平操纵盘通过机械操纵控制着水平安定面(THS),其优先级高于电控优先级,其控制系统结构如图2所示。
图2 A320飞机电传飞行控制系统纵向控制结构
2.3.2 滚转轴
ELAC1控制着副翼,ELAC2作为备份,运行正常控制律,SEC接受ELAC的命令发送给扰流片完成相应的功能,FAC完成协调转换,ELAC都故障,SEC运行直接控制律且航向阻尼功能消失,其控制系统结构如图3所示。
图3 A320飞机电传飞行控制系统横滚控制结构
2.3.3 航向轴
方向舵操纵;脚蹬为机械操纵;飞行中,偏航阻尼和协调转弯及配平是电子控制。航向阻尼协调转弯方向舵配平由ELAC计算发给FAC,FAC1优先于FAC2,FAC2处于热备份,其控制系统结构如图4所示。
图4 A320飞机电传飞行控制系统航向控制结构
3A340飞机电传飞控系统分析
3.1 概述
A340飞机的电传飞行控制系统是在A320飞控系统的基础上进行了进一步的综合,采用了5ⅹ2的计算机结构,舵机仍采用主备工作方式。
3.2 体系结构
5台计算机完成电传操纵,分别为3台主飞控计算机FCPC(Flight Control Primary Computer)控制所有的操作面,2台备分飞控计算机FCSC(Flight Control Secondary Computer)控制部分操作面。A340已取消了专用的FAC,在俯仰及航向仍保留机械操纵。系统的结构如图5所示
图5 A340飞机电传飞行控制系统结构
每个飞控计算机包含两个支路:指令支路和监控支路,两支路的功能不同,指令支路运行分配给该计算机的任务,监控支路确保指令支路的正确性,当计算机的两个支路的输出不一致时,该计算机被切除,剩下的计算机按照预先规定的优先级顺序投入运行。飞控计算机采用了非相似的硬件和软件:主计算机和从计算机使用非相似的处理器;指令支路和监控支路使用不同的编程语言。主计算机使用Intel 80386微处理器,其指令支路的软件用汇编语言编写,监控支路使用的编程语言为
PL/M。从计算机使用Intel 80186微处理器,其指令支路的软件用汇编语言编写,监控支路使用的编程语言为Pascal。
飞机的三轴操纵由主、备计算机控制,正常时由P1,P3,S1协同工作完成飞机的操纵。P1提供升降舵、内侧副翼、水平安定面。P3提供外侧副翼的控制功能。S1提供配平及方向舵的控制功能。当P1出现故障时,其升降舵、内侧副翼、水平安定面的控制功能由P2接替,如果P2再出现故障,由S1接替工作,航向阻尼的功能由P3接替。P3出现故障由S1接替,S1出现故障时由S2接替。其操纵面布局及控制权限变更顺序如图6所示
图6 A340飞机操纵面布局及控制权限变更顺序
3.3飞机三轴操纵
3.3.1 俯仰轴
飞行员指令通过侧杆送给主飞行控制计算机FCPC和FCSC。飞行导引和包线计算机FMGEC (Flight Management Guidance and Envelope Computers)输出驾驶仪指令到FCPC,FCPC经过控制解算后输出操作指令到升降舵及水平安定面,当FCPC故障后,由FCSC来控制升降舵。机械链通过液压马达控制水平安定面,达到飞机失去电气控制时,仍有机械备份操纵飞机。飞机俯仰操纵的原理见图7。
图7 A340飞机电传飞行控制系统纵向控制结构
3.3.2 航向轴
同纵向通道一样,FCPC提供主要控制,FCSC作为备份。驾驶员的指令通过脚蹬传给FCPC及FCSC、同时通过机械链操纵方向舵。航向阻尼功能由FCPC提供,自动驾驶仪的航向指令由FMGEC
提供给FCPC ,FCPC 控制相应的舵面完成相关功能,详见图8。
图8 A340飞机电传飞行控制系统航向控制结构
4 B777飞机电传飞控系统分析
4.1 概述
B777是波音客机家族中,首次采用电传飞行控制的系统。B777的电传飞行控制系统的结构是在早期的7J7设计的基础上发展起来的。其电传系统具有极高的功能完整性和可靠性。
4.2 体系结构
B777电传飞行控制系统是由3х3飞行控制计算机PFC (Primary Flight Computers )和模拟式作动器控制电子设备ACE (Actuator control Electronics )通过629总线连接实现飞机的电传飞行控制。飞控系统接收驾驶员或自动驾驶发出的指令,并控制升降舵、方向舵、副翼、襟翼、缝翼和水平安定面等31个作动器,完成飞机操纵控制,其系统结构见图9。此外扰流板4和11通过机械钢缆接收驾驶员指令,完成滚转操纵,水平安定面通过连杆接收驾驶员指令,完成俯仰操纵,该功能提供了在全部电气系统发生故障时能安全操纵飞机着陆的能力。
图9 B777飞机电传飞行控制系统结构
4.3 系统原理
驾驶员的指令信号通过传感器送给ACE ,ACE 把这些信号转换成数字量并通过629总线送给PFC 。PFC 除接收驾驶员指令信号外,还通过629总线接收AIMS (飞机信息管理系统);ADIRU (大气数据惯性参考单元);SAARU (备份姿态大气数据参考单元)等信息。PFC 根据控制律及飞行包
线的限制来计算控制指令(纵、航向增稳及三轴的飞行包线保护),PFC以广播方式传送控制指令到629总线上,ACE接收这些指令,并转换成模拟信号馈送至舵机。
在自动驾驶仪工作方式下,PFC通过629接收自动驾驶仪AFDC(Autopilot Flight Director Computer)的信号:通过ACE送给舵机。PFC也提供回传信号到回传作动器。它发送广播回传信号到629,AFDC收到这个信号后驱动回传作动器,回传作动器驱动操纵杆(同驾驶仪命令同步)。
系统具有有三种工作模式:正常模式,备份模式和直接链模式。正常模式工作如上所述,备份模式当大气数据等信息失效时进入,在这个模式下,PFC执行重构的控制律。在直接链模式下,PFC 被旁路,ACE直接响应驾驶员指令。
4.5 飞机三轴操纵
4.5.1 俯仰轴
操纵杆通过与其相连的位置传感器(6余度)、力传感器(2余度)采集操纵指令,通过俯仰通道的4个舵机(PCUs)驱动左、右升降舵(每个舵面2个舵机)以提供飞机主要的俯仰控制。
来自驾驶员指令传感器、飞行控制计算机(FCC)或自动驾驶仪计算机(AFDC)的俯仰指令进入相应的ACE单元,并转换成模拟指令控制4个升降舵舵机,完成俯仰控制。其结构见图10。
水平安定面是单独控制的,尽管它的控制指令仍是从ACE单元来的,在这种情况下,设在控制盘上的俯仰配平开关允许驾驶员选择俯仰配平输入进系统。输出经过ACEs到达安定面配平控制模块(STCMs),这个模块通过螺旋作动器控制水平安定面。水平安定面位置传感器反馈安定面的位置到ACEs。
图10 B777飞机电传飞行控制系统纵向控制结构
4.5.2 滚转轴
控制盘通过滚转位置传感器、滚转力传感器把控制指令馈送给系统来完成控制。控制盘还被机械地连到4和11扰流板舵机,以进行直接机械滚转控制。其结构见图11。
驾驶员或系统的滚转指令先通过ACE单元输入到计算机经解算后再通过ACE送给相关舵机,机械操纵指令是直接通过ACE送给舵机的。总的来说,滚转控制通道的输入提供给以下的舵机:左、右副翼舵机(四个)
左、右襟副翼舵机(执行副翼功能)
除4和11扰流板以外的所扰流板
除了通过操纵左和右机翼上不同的扰流板来提供滚转控制外,本通道还担负集合扰流板控制(地
面扰流板功能以及减速功能)。速度制动选择是使用单独安装在中央控制台上的控制杆实现的,控制杆机械地连接到速度制动控制杆传感器,这些传感器直接连接到ACEs。
图11 B777飞机电传飞行控制系统滚转轴控制结构
4.5.3 航向轴
脚蹬被机械地连接到方向舵人感系统,以提供机械操纵感觉。脚蹬位置传感器把航向指令输入到ACEs并经飞控计算机处理后传输到(或直接传输到)方向舵的三个舵机。其结构见图12。
方向舵配平选择器允许机组人员通过ACE单元使用方向舵配平。方向舵配平指示通过在驾驶舱里的AIMS(Aircraft Imformation Management System)到方向舵配平指示器上显示。
图12 B777飞机电传飞行控制系统行向轴控制结构
5A380飞机电传飞控系统分析
A380 电传飞控系统采用了双体系(dual-architecture system)结构,除控制指令信号由电信号传送(Flight-by-wire system)外;部分功率也由电信号传送(Power-by-wire system)。其结构布局见图14。
由于机翼较长应用了ACT功能保护机翼结构。
图13 A380飞机电传飞行控制系统结构布局
A380电传飞控系统除具备常规电传飞控系统的特性以外还有以下特点:
?飞机主飞行操纵面由不同类型作动器驱动,有常规液压作动器、电静液作动器、电备份作动器,详见图13。
?用于应急备份的直接机械连接将被直接电气连接所代替。电信号直接控制EBHA作动器。
尽管没有以前客机上的直接机械链,动力结构与以前相比也有了很大的变化,但A380仍
提供了相当程度的非相似余度,保证飞行的苛刻要求都已达到。增加了滚转操纵面的数量。
飞控计算的结构类似于A330及A340系列的计算机。
6波音空客电传飞控系统计算机体系结构分析
在民机电传飞控系统领域目前有空客、波音处于领头羊地位。他们在飞控计算机体系结构上都有自己的特点。图15列出了波音及空客电传飞控的顶层结构。
左侧所示为波音原理的简图。系统中包括3台主飞行计算机(PFC),每台计算机中又包括3条通路(Lane),这3条通路的硬件非相似但软件相同。每条通路在运行周期中具有不同的功能(指令、监控、备份),而且这些功能在上电后是循环确定的。表决技术被用来检测各通路间的差异或不一致,而且,对于不同类型的数据,比较技术有所变化。PFC与4个作动器控制电子(ACE)单元之间的通讯通过多路A629飞行控制数据总线来实现。ACE单元直接驱动飞行控制作动器。一个独立的飞控直流电系统为飞控系统供电。
空客的方法如图14右侧所示。5台主计算机用于:3台主飞行控制计算机(FCPCs)和两台辅飞行控制计算机(FCSCs)。每台计算机包括命令和监控两部分,分别加载了不同的软件。主/副计算机具有不同的体系结构,非相似的硬件和非相似的软件。FCSC输出到副翼、升降舵和方向舵的指令仅做备份使用。电源与信号通路之间是隔离的。
图14 波音、空客电传飞控系统体系结构比较
7我国大型飞机电传飞控系统方案设想
电传飞控系统的设计,应充分考虑系统的先进性、安全性、经济性与可扩展能力。为了保证飞机的高派遣率,在选用多余度全时、全权数字电传系统作为飞机三轴主操纵系统的同时,三轴电传控制系统具有电气直接链功能,并且对关键的操作链仍设置了最低限度的传统机械传动系统作为备份,如水平安定面电/机械复合操纵和最外侧扰流片的机械操纵,以保证在极小概率的多余度电传系统的功能丧失后,飞机仍可返航并安全着陆。其原理框图如图15所示。
机械操纵机构
图15 电传飞控系统构型示意图
电传飞行控制系统基本组成及系统连接关系图16所示。
图16 电传飞控系统连接关系图
飞控计算机分系统采用5*2计算机体系结构,其中,P1、P2、P3为主飞控计算机,S1、S2为备飞控计算机,主计算机3×2余度,备计算机2×2余度。每台计算机均由指令通道和监控通道构成,组成一个自监控计算机对。
作动器的配置如下:
升降舵舵机为4个(每侧2个,主备工作);每个舵机均为电气两余度;水平安定面舵机为三个,主/备/备方式工作;副翼舵机为每侧两个,主备工作;每个舵机为电气两余度;方向舵由三个无余独电液舵机以主/备/备方式控制。三个舵机分别由三台主飞控计算机控制;扰流片各由一个无余度电液舵机驱动。
缝翼和襟翼舵机与舵面一一对应,分成左右对称的两组(每组两片襟翼、两片缝翼)分别有两台备飞控计算机控制。
参考文献
[1]B777培训手册
[2] A320培训手册
[3] Ian Moir ,Allan Seabridge;Civil Avionics Systems;Professional Engineering Publishing Limited;
[4] Roger W.Pratt; Flight Control Systems;The American Institute of Aeronautics and Astronautics.
课程设计任务书 学生姓名: 李攀 专业班级: 自动化0804 指导教师: 谭思云 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件: 飞行器控制系统的开环传递函数为: ) 2.361(4000)(+= s s K s G 控制系统性能指标为调节时间s 008.0≤,单位斜坡输入的稳态误差000443.0≤,相角裕度大于85度。 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: (1) 课程设计任务书的布置,讲解 (一天) (2) 根据任务书的要求进行设计构思。(一天) (3) 熟悉MATLAB 中的相关工具(一天) (4) 系统设计与仿真分析。(四天) (5) 撰写说明书。 (两天) (6) 课程设计答辩(一天) 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
摘要 根据被控对象及给定的技术指标要求,设计自动控制系统,既要保证所设计的系统有良好的性能,满足给定技术指标的要求,还有考虑方案的可靠性和经济性。本说明书介绍了在给定的技术指标下,对飞行器控制系统的设计。为了达到给定要求,主要采用了串联之后—超前校正。 在对系统进行校正的时候,采用了基于波特图的串联之后—超前校正,对系统校正前后的性能作了分析和比较,并用MATLAB进行了绘图和仿真。对已校正系统的高频特性有要求时,采用频域法校正较其他方法更为方便。 关键词:飞行器控制系统校正 MATLAB
飞行控制系统 为了使无人机飞行控制系统具有强大的数据处理能力、较低的功耗、较强的灵活性和更高的集成度,提出了一种以SmartFusion为核心的无人机飞行控制系统解决方案。为满足飞控系统实时性和稳定性的要求,系统采用了μC/OS-Ⅱ实时操作系统。与传统的无人机飞行控制系统相比,在具有很强的数据处理能力的同时拥有较小的体积和较低的功耗。多次飞行证明,各个模块设计合理,整个系统运行稳定,可以用作下一代无人机高性能应用平台。 关键词:无人机;飞行控制系统;SmartFusion芯片;μC/OS-Ⅱ 0 引言 飞行控制系统是无人机的重要组成部分,是飞行控制算法的运行平台,它的性能好坏直接关系着无人机能否安全可靠的飞行。随着航空技术的发展,无人机飞行控制系统正向着多功能、高精度、小型化、可复用的方向发展。高精度要求无人机控制系统的精度高,稳定性好,能够适应复杂的外界环境,因此控制算法比较复杂,计算速度快,精度高;小型化则对控制系统的重量和体积提出了更高的要求,要求控制系统的性能越高越好,体积越小越好。此外,无人机飞行控制系统还要具有实时、可靠、低成本和低功耗的特点。基于以上考虑,本文从实际工程应用出发,设计了一种基于SmartFusion的无人机飞行控制系统。 1 飞控系统总体设计
飞行控制系统在无人机上的功能主要有两个:一是飞行控制,即无人机在空中保持飞机姿态与航迹的稳定,以及按地面无线电遥控指令或者预先设定好的高度、航线、航向、姿态角等改变飞机姿态与航迹,保证飞机的稳定飞行,这就是通常所谓的自动驾驶;二是飞行管理,即完成飞行状态参数采集、导航计算、遥测数据传送、故障诊断处理、应急情况处理、任务设备的控制与管理等工作。 飞行控制系统主要完成3个功能任务,其层次构成为三层:最底层的任务是提高无人机运动和突风减缓的固有阻尼——三个轴方向的阻尼器功能;第2层的任务是稳定无人机的姿态角——基本驾驶仪的功能(主要进行角运动控制);第3层的任务是控制飞行高度、航迹和飞行速度,实现较高级自动驾驶功能。飞行控制系统原理框图见图1。 由上述分析易知,飞行控制系统主要由飞行控制器、传感器(或敏感元件)、舵机3部分组成。无人机飞行控制系统的基本架构如图2所示。
自动飞行控制系统 飞行控制系统(简称飞控系统)的作用是保证飞机的稳定性和操纵性,提高飞机飞行性能和完成任务的能力,增强飞行的安全性和减轻驾驶员的工作负担。 深圳市瑞伯达科技有限公司,致力于成为全球无人机飞行器领导品牌,是智能化无人机飞行器及控制系统的研制开发的专业厂商,生产并提供各行业无人机应用的解决方案。产品线涵盖各种尺寸多旋翼飞行器、专业航拍飞行器、无人机飞行控制系统、无人机地面站控制系统、高清远距离数字图像传输系统、专业级无线遥控器、高精飞行器控制模块及各类飞行器配件 飞行器的自动飞行一、问题的提出早在重于空气的飞行器问世时,就有了实现自动控制飞行的设想。1891年海诺姆.马克西姆设计和建造的飞行器上安装了用于改善飞行器纵向稳定性的飞行系统。该系统中用陀螺提供反馈信号,用伺服作动器偏转升降舵。这个设想在基本概念和手段上与现代飞行自动控制系统有惊人的相似,但由于飞机在试飞中失事而未能成为现实。 60年代飞机设计的新思想产生了,即在设计飞机的开始就考虑自动控制系统的作用。基于这种设计思想的飞机称为随控布局飞行器(Control Configured Vehicle 简称CCV)。这种飞机有更多的控制面,这些控制面协同偏转可完成一般飞机难以实现的飞行任务,达到较高的飞行性能。 飞控系统分类飞控系统分为人工飞行控制系统和自动飞行控制系统两大类。由驾驶员通过对驾驶杆和脚蹬的操纵实现控制任务的系统,称为人工飞行控制系统。最简单的人工飞行控制系统就是机械操纵系统。不依赖于驾驶员操纵驾驶杆和脚蹬指令而自动完成控制任务的飞控系统,称为自动飞行控制系统。自动驾驶仪是最基本的自动飞行控制系统。飞控系统构成飞控系统由控制与显示装置、传感器、飞控计算机、作动器、自测试装置、信息传输链及接口装置组成。控制及显示装置是驾驶员输入飞行控制指令和获取飞控系统状态信息的设备,包括驾驶杆、脚蹬、油门杆、控制面板、专用指示灯盘和电子显示器(多功能显示器、平视显示器等)。传感器为飞控系统提供飞机运动参数(航向角、姿态角、角速度、位置、速度、加速度等)、大气数据以及相关机载分系统(如起落架、机轮、液压源、电源、燃油系统等)状态的信息,用于控制、导引和模态转换。飞控计算机是飞控系统的“大脑”,用来完成控制逻辑判断、控制和导引计算、系统管理并输出控制指令和系统状态显示信息。作动器是飞控系统的执行机构,用来按飞控计算机指令驱动飞机的各种舵面、油门杆、喷管、机轮等,以产生控制飞机运动的力和力矩。自测试装置用于飞行前、飞行中、飞行后和地面维护时对系统进行自动监测,以确定系统工作是否正常并判断出现故障的位置。信息传输链用于系统各部件之间传输信息。常用的传输链有电缆、光缆和数据总线。接口装置用于飞控系统和其他机载系统之间的连接,不同的连接情况可以有多种不同的接口形式。 自动飞行控制系统由自动驾驶仪、自动油门杆系统、自动导航系统、自动进场系统和自动着陆系统、自动地形跟随/回避系统构成。 RIBOLD瑞伯达科技有限公司,致力于成为全球飞行影像系统独家先驱,其产品线涵盖无人机飞行控制系统及地面站控制系统、影视航拍飞行平台、商用云台系统、高清远距离数字图像传输系统、无线遥控和成像终端及模型飞行器产品,多旋翼飞行器和高精控制模块。 RBD瑞伯达坚持创新, 以技术和产品为核心,通过完美的产品带来前所未有的飞行体验。我们的目标是做世界一流的无人机企业,为我们的客户提供一流的产品和服务!
(此文档为word格式,下载后您可任意编辑修改!) 一、对最简单的角位移系统的评价 1、某低速飞机本身具有较好的短周期阻尼,采用这种简单的控制规律是可行的。它的传递函数为: open p3_6 系统根轨迹为: nem1=-12.5; den1=[1 12.5]; sys1=tf(nem1,den1); nem2=[-1 -3.1]; den2=[1 2.8 3.24 0]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 随着k的增大,该系统的一对闭环复极点的震荡阻尼逐渐减小。但由于飞机本身的阻尼较大,所以当k增大致1.34时,系统的震荡阻尼比仍有0.6。k增大到6.2时系统才开始不稳定。 2、现代高速飞机的短周期运动自然阻尼不足,若仍采用上述单回路控制系统则不能胜任自动控制飞机的要求。 open p3_10 系统根轨迹为: nem1=-10; den1=[1 10]; sys1=tf(nem1,den1);
nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3 0]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 随着k增大,系统阻尼迅速下降。当k=1.06时,处于临界稳定。所以无法选择合适的k值以满足系统动静态性能。为了使系统在选取较大的k值基础上仍有良好的动态阻尼,引入俯仰角速度反馈。 二、具有俯仰角速率反馈的角位移自动驾驶仪参数设计open p3_16 1、系统内回路根轨迹为: nem1=-10; den1=[1 10]; sys1=tf(nem1,den1); nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) 按物理概念似乎速率陀螺的作用越强,阻尼效果越显著。但根轨迹分析告诉我们,只有在一定范围内这种概念才是正确的,否则会得到相反的效果。这种现象是由舵回路的惯性造成的。舵回路具有不同时间常数时的内回路根轨迹图: Tδ=0 sys1=-1; nem2=[-4.3 -4.3*0.33]; den2=[1 0.61 3.3]; sys2=tf(nem2,den2); sys=series(sys1,sys2); rlocus(sys) Tδ=0.1
2017-10-08 GaryLiu 于四川绵阳 无人机的飞行控制是无人机研究领域主要问题之一。在飞行过程中会受到各种干扰,如传感器的噪音与漂移、强风与乱气流、载重量变化及倾角过大引起的模型变动等等。这些都会严重影响飞行器的飞行品质,因此无人机的控制技术便显得尤为重要。传统的控制方法主要集中于姿态和高度的控制,除此之外还有一些用来控制速度、位置、航向、3D轨迹跟踪控制。多旋翼无人机的控制方法可以总结为以下三个主要的方面。 1.线性飞行控制方法 常规的飞行器控制方法以及早期的对飞行器控制的尝试都是建立在线性飞行控制理论上的,这其中就有诸如PID、H∞、LQR以及增益调度法。 1)PID PID控制属于传统控制方法,是目前最成功、用的最广泛的控制方法之一。其控制方法简单,无需前期建模工作,参数物理意义明确,适用于飞行精度要求不高的控制。 2)H∞ H∞属于鲁棒控制的方法。经典的控制理论并不要求被控对象的精确数学模型来解决多输入多输出非线性系统问题。现代控制理论可以定量地解决多输入多输出非线性系统问题,但完全依赖于描述被控对象的动态特性的数学模型。鲁棒控制可以很好解决因干扰等因素引起的建模误差问题,但它的计算量非常大,依赖于高性能的处理器,同时,由于是频域设计方法,调参也相对困难。 3)LQR LQR是被运用来控制无人机的比较成功的方法之一,其对象是能用状态空间表达式表示的线性系统,目标函数是状态变量或控制变量的二次函数的积分。而且Matlab软件的使用为LQR的控制方法提供了良好的仿真条件,更为工程实现提供了便利。 4)增益调度法 增益调度(Gain scheduling)即在系统运行时,调度变量的变化导致控制器的参数随着改变,根据调度变量使系统以不同的控制规律在不同的区域内运行,以解决系统非线性的问题。该算法由两大部分组成,第一部分主要完成事件驱动,实现参数调整。如果系统的运行情况改变,则可通过该部分来识别并切换模态;第二部分为误差驱动,其控制功能由选定的模态来实现。该控制方法在旋翼无人机的垂直起降、定点悬停及路径跟踪等控制上有着优异的性能。 2.基于学习的飞行控制方法 基于学习的飞行控制方法的特点就是无需了解飞行器的动力学模型,只要一些飞行试验和飞行数据。其中研究最热门的有模糊控制方法、基于人体学习的方法以及神经网络法。 1)模糊控制方法(Fuzzy logic) 模糊控制是解决模型不确定性的方法之一,在模型未知的情况下来实现对无人机的控制。 2)基于人体学习的方法(Human-based learning) 美国MIT的科研人员为了寻找能更好地控制小型无人飞行器的控制方法,从参加军事演习进行特技飞行的飞机中采集数据,分析飞行员对不同情况下飞机的操作,从而更好地理解无人机的输入序列和反馈机制。这种方法已经被运用到小型无人机的自主飞行中。 3)神经网络法(Neural networks)
无人机飞行路线控制系统设计 由于无人机是通过无线遥控的方式完成自动飞行和执行各种任务,具有安全零伤亡、低能耗、重复利用率高、控制方便等优点,因此得到了各个国家、各行各业的高度重视和广泛应用。尤其以美国为代表,无论是在军事、民用、环境保护还是科学研究中,都将无人机的使用发挥到淋漓尽致,其拥有全球最先进的“捕食者”和“全球鹰”战斗无人机、监测鸟类的“大乌鸦”无人机、民用用途的“伊哈纳”无人机等等。我国在无人机研制方面也取得了一定的成就,拥有技术卓越的“翔龙”和“暗箭”高空高速无人侦查机、多用途的“黔中”无人机、探测海洋的“天骄”无人机、中继通讯的“蜜蜂”无人机等等。在未来,随着现代化工业技术、信息技术、自动化技术、航天技术等高新技术的迅速发展,无人机技术将日趋成熟,性能日益完善,为此将拥有更为广阔的应用前景。为确保无人机能够有效地完成各种飞行任务,研发者开发了各种技术方式的飞行控制系统,完成对无人机的起飞、飞行控制、着陆以及相应目标任务等操作的控制。飞行路线控制是飞行控制系统中最基础也是最核心的功能控制部分,其它所有的飞行任务控制都是飞行路线控制的基础之上实现。目前对于无人机飞行路线的控制已有各种各样方式的系统,但大多数系统都存在一定缺陷,如有些系统操作过于繁杂,不够智能化;有些系统只能在视距范围遥 控无人机,严重限制了无人机的使用;有些系统过于专用化,不能适用于大多数类型的无人机;有些比较完善的系统,造价又过于昂贵,等等一系列问题。针对以上存在的这些问题,本课题提出了一种成本低、
遥控距离远、智能化、高效化、适用性广的无人机飞行路线控制系统设计方案。该系统方案包括两大部分,一部分是操作人员所处的地面监控系统,一部分是无人机端的受控系统,实现的机制主要是无人机不断地将自身的定位信息实时地传送给地面控制系统,地面控制系统将无人机位置信息通过电子地图可视化显示给操作人员,操作人员结合本次飞行任务,采用灵活的鼠标绘制方式在地图上绘制预定的飞行路线,地面控制系统对绘制路线进行自动处理生成可用的路线控制信息帧并发送给无人机受控系统,无人机受控系统接收到位置控制信息帧,不断结合实时的方位信息得到飞行控制信息,从而遥控无人机按照预定路线飞行。此外,为方便用户以后对历史数据的查看,以分析总结得到一些有价值的信息,地面监控系统还包含了对预定路线和无人机历史飞行路线的存储、查询和在地图中回放功能。基于GIS技术的地面监控系统的具体实现是在Windows操作系统上,采用Visual Basic作为系统开发环境并结合MSComm串口通信技术、Mapx二次开发组件技术、Winsock网络接口技术以及Access数据库技术完成软件设计,实现与无人机受控系统的无线通信、GIS系统操作和监控、历史数据存储和重现等,其中实验区域的电子地图采用Mapinfo Professional开发软件绘制完成,并创新性地设计并绘制了画面简洁的带高层信息的二点三维矢量地图,而对于绘制路线的优化和提取处理采用了垂距比值法和最小R值法。无人机端使用BDS-2/GPS双卫星系统对无人机实时位置进行高精度的定位,采用双串口单片机进行运算控制处理,实时的飞行控制信息采用了几何空间算法得到,另外采
课程设计任务书 学生姓名:________ 专业班级: _______________ 指导教师:_______ 工作单位: ____________ 题目:飞行器控制系统设计 初始条件: 飞行器控制系统的开环传递函数为: G(s) -^500^ s(s 361.2) 控制系统性能指标为调节时间0.01s,单位斜坡输入的稳态误差 0.000521,相角裕度大于84度。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) (1)设计一个控制器,使系统满足上述性能指标; (2)画出系统在校正前后的奈奎斯特曲线和波特图; (3)用Matlab画出上述每种情况的阶跃响应曲线,并根据曲线分析系统的动态性能指标; (4)对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析 计算的过程,给出响应曲线,并包含Matlab源程序或Simulink仿 真模型,说明书的格式按照教务处标准书写 时间安排:
指导教师签名: 系主任(或责任教师)签名: 目录 1串联滞后—超前校正的原理............ 错误! 未定义书签。 2 飞行器控制系统的设计过程. ................. 错误! 未定义书签。 2.1 飞行器控制系统的性能指标............... 错误! 未定义书签。 2.2 系统校正前的稳定情况................. 错误! 未定义书签。 2.2.1 校正前系统的波特图............. 错误! 未定义书签。 2.2.2 校正前系统的奈奎斯特曲线 (2) 2.2.3 校正前系统的单位阶跃响应曲线......... 错误! 未定义书签。 2.3 飞行器控制系统的串联滞后—超前校正 (4) 2.3.1 确定校正网络的相关参数 (4) 2.3.2 验证已校正系统的性能指标 (6) 2.4 系统校正前后的性能比较 (8) 2.4.1 校正前后的波特图 (8) 2.4.2 校正前后的奈奎斯特曲线 (9) 2.4.3 校正前后的单位阶跃响应曲线 (11) 3 设计总结与心得体会 (12) 参考文献 (13)
三、典型飞行控制系统 1、已知某飞机的传递函数是: ) 69.19.0()4.0(5.1) () (2 +++-= ??Z s s s s s s δ?,其俯仰姿态角控制系统的 控制规律为:? Z Z Z ?K +?-?K =?+T ? ? ??δ? ? δ)()1(g s 。 (1)由控制规律画出相应的系统结构图; (2)要控制该飞机舵回路的时间常数应作何限制? (3)若飞机受到常值力矩92 .0=?M Z γ 公斤*米,已知 Z Z M δ=-1.15公斤*米/度,若要求 稳定后其静差 s θ?<0 1 ,应对Z K ? 作何限制; (4)若要保证该系统的动态性能,应如何选取Z ? K ? 的值。 (5)分析在垂直向上风干扰下,系统的动态相应过程以及稳态情况。 2、已知某飞机的传递函数是: ) 47.15.1()59.0(2.1) ()(2 +++-= ??Z s s s s s s δ?,其俯仰姿态角控制系统的控 制规律为:? Z Z Z ?K +?-?K =?+? ???δ? ? )()11.0(g s 。 (1)由控制规律画出相应的系统结构图; (2)求出内回路闭环传递函数,并绘制随参数? Z K ? 变化的根轨迹图,并求取 值时的使? Z K =? ξ87.0以及此时三个内回路闭环极点值; (3)求出外回路闭环传递函数,并绘制随参数?Z K 变化的根轨迹图,并求取 值时的使?ξZ K =8.0以及此时三个外回路闭环极点值; (4)采用根轨迹方法分析舵回路时间常数对飞行控制系统工作性能的影响; (5)分析参数? Z K ? 与?Z K 之间的关系。 ● 自动驾驶仪有哪几个工作回路? (1)同步回路 (2)舵回路 (3)稳定回路 (4)控制回路 ● 俯仰阻尼器的作用是什么? 用来改善飞机的纵向短周期运动的阻尼特性 ● 滚转阻尼器的作用是什么? 用来改善飞机—阻尼器系统的滚转特性 ● 什么是控制增稳系统?其作用是什么? 不牺牲操纵性来提高飞机的阻尼比和固有频率,又可以解决非线性操纵指令问题 ● 飞行高度控制系统需要 最基本的信号? 需要直接测量飞行高度,使用高度差传感器,根据高度差的信息来直接控制飞机的飞行姿态,从而改变航迹请教,以实现对飞行高度的闭环稳定和控制
浅析无人机航空摄影测量系统及应用 发表时间:2017-10-26T19:53:11.473Z 来源:《建筑科技》2017年9期作者:舒永国 [导读] 发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 北京市自来水集团禹通市政工程有限公司北京 100089 摘要:测绘测量技术系统是应对自然灾害、有效处置突发事件、构建完善保障系统与加强防灾减灾工作建设的重要组成部分,也是目前的一个重要战略问题。发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 关键词:无人机;航空摄影;测量系统;应用 1、前言 航空数字摄影测量是基础地理信息采集的最有效手段之一。随着计算机技术的发展和微处理机的广泛应用,政府各部门对测绘资料的需求越来越大,对资料现势性要求越来越高,对资料所能包涵的信息容量越来越多。无人机航空摄影测量作为一种新型的测量方式不断呈现在大家的面前,伴随着高科技技术环境下测绘技术与测绘装备的快速发展,融合了无人机技术、航空摄影技术、移动测量技术、数字通信技术等一系列新兴技术形态的无人机航空摄影测量系统成为防灾减灾的重要手段,它建立起一整套综合应急测绘保障服务系统。 2、无人机航空摄影测量系统 目前,国内已经投入使用的无人机航空摄影测量系统有“华鹰”、“飞象”、“QuickEye”等。无人机航空摄影测量系统主要由硬件系统和软件系统组成。硬件系统包括机载系统和地面监控系统;软件系统则涵盖了航线设计、飞行控制、远程监控、航摄检查、数据预处理等五个主要的系统。 2.1硬件系统 2.1.1无人机机载系统 在整个无人机航空摄影测量系统构成中,无人机作为主要的系统搭载平台,是整个系统集成与融合的重要基础。这一硬件系统主要由无人机、数字摄影系统、导航与飞行控制系统、通信系统等部分构成。在该系统工作的过程中,整个系统会按照预先设定的航线进行相应的自主飞行,并且完成预先设定的航空摄影测量任务,同时实时地把飞机的速度、高度、飞行状态、气象状况等参数传输给地面控制系统。 2.1.2地面飞行监控系统 这一分支系统是影响飞行平台运行的重要因素,主要有电子计算机、飞行控制软件、电子通信控制介质和电台等设备。在飞行平台的运行过程中,地面飞行控制系统可以据无人机飞行控制系统发回的飞行参数信息,实时在地图上精确标定飞机的位置、飞行路线、轨迹、速度、高度和飞行姿态,使地面操作人员更容易掌握无人机的飞行状况。 2.2软件系统 2.2.1航线设计软件 航线设计在无人机航空摄影测量系统中扮演着十分重要的角色,其直接决定了整个系统工作的方向和精准度。这一分支系统作为信息采集的关键步骤,需要对于系统运行经过的作业范围、地形地貌特点、属性精度要求、摄影测量参数以及摄影测量的结果进行综合设定。航线设计软件需要对相关的工作参数进行综合设定,诸如计算行高、重叠度和地面分辨率等飞行参数,进而获得飞行所需的曝光点坐标、基线长度等参数。此外,航线设计软件还有一个十分重要的功能,那就是对于设计好的航线进行检查,诸如:航线走向、摄影基面、行高、地面分辨率和像片重叠度等。 2.2.2数据接受与预处理系统 这是无人机系统中最为重要的软件系统,也是无人机航空摄影测量系统室外作业的最后一步,直接影响到后续的图像数据处理质量。一般情况下,无人机航空摄影测量系统在影像获取过程中,由于受外界和内部因素的影响,可能降低获取的原始图像的质量。为避免原始图像后续处理的质量问题,在影像配准、拼接之前,必须对原始影像进行预处理。这一预处理的过程,先后涵盖了图像校正、图像增强等方面。 3、项目应用实践 3.1工程概况 井山水库位于抚河流域东乡河南港支流黎圩水上游,地处江西省抚州市东乡县黎圩镇内,坝址位于南港支流东乡县黎圩镇井山村上游河段1.0km狭谷段,坝址区距黎圩镇约5km,距东乡县县城约25km,控制流域面积25.2km2,正常蓄水位83.00m(黄海高程,下同),总库容2250×104m3,是一座灌溉、供水等综合效益的中型水利枢纽工程。 3.2外业测量 3.2.1航摄 航摄仪采用Sonya7R,焦距35mm,相幅大小为:7360×4192,像元分辨率为4.88um。本次无人机航摄分两个架次进行,由GPS领航数据计算相对飞行高度为724m,地面分辨率为0.09m,航摄面积约10km2。两个架次飞行质量和影像良好,影像清晰度较高,且照片色彩均匀,饱和度良好,能够表达真实的地物信息,可以满足1:2000成图要求。本次飞行航向重叠度为75%,旁向重叠度为50%。 3.2.2像控测量 像控点的布设应能够有效控制成图的范围,测区的四周及中心位置必须布设控制点,根据测区的情况,每个测区布设控制点20多个,且都设置为平高点。 3.2.3空中三角测量 本项目采用SVS软件进行空三加密,根据航空飞行及影像分布情况,将空三区域分为两个加密区域网采用自动与手动相结合的方式进行空三加密,即采用自动匹配进行像点量测,剔除粗差。人工调整直至连接点符合规范要求,保证在2/3个像素以内。加入外业像控点对本
学号: 课程设计 题目飞行器控制系统设计 学院自动化学院 专业自动化 班级自动化1002班 姓名 指导教师肖纯 2012 年12 月19 日
课程设计任务书 学生姓名: 专业班级:自动化1003班 指导教师: 肖 纯 工作单位: 自动化学院 题 目: 飞行器控制系统设计 初始条件:飞行器控制系统的开环传递函数为: ) 2.361(4500)(+= s s K s G 要求设计控制系统性能指标为调节时间ts 008.0≤秒,单位斜坡输入的稳态误差000443.0≤,相角裕度大于75度。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写 等具体要求) (1) 设计一个控制器,使系统满足上述性能指标; (2) 画出系统在校正前后的奈奎斯特曲线和波特图; (3) 用Matlab 画出上述每种情况的阶跃响应曲线,并根据曲线分析系统 的动态性能指标; (4) 对上述任务写出完整的课程设计说明书,说明书中必须写清楚分析 计算的过程,给出响应曲线,并包含Matlab 源程序或Simulink 仿真模型,说明书的格式按照教务处标准书写。 时间安排: 指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日
随着经济的发展,自动控制技术在国民经济中发挥着越来越重要的作用。自动控制就是在没有人的参与下,系统的控制器自动的按照人预订的要求控制设备或过程,使之具有一定的状态和性能。在实际中常常要求在达到制定性能指标的同时能更加节约成本、能具有更加优良的效果。本次飞行器设计中,采用频域校正的方法使系统达到指定的性能指标,同时采用matlab仿真软件更加直观的进行仿真分析和验证。 在此设计中主要采用超前校正的方法来对系统进行性能的改进,通过分析、设计、仿真、写实验报告书的过程,进一步加深了对自动控制原理基本知识的理解和认识,同时通过仿真系统的奈奎斯特图、bode图、单位阶跃响应曲线,进一步理解了系统的性能指标的含义,同时也加深了对matlab仿真的掌握,培养了认识问题、分析问题、解决问题的能力。
关于无人机飞行控制系统的全面解析 飞控的大脑:微控制器在四轴飞行器的飞控主板上,需要用到的芯片并不多。目前的玩具级飞行器还只是简单地在空中飞行或停留,只要能够接收到遥控器发送过来的指令,控制四个马达带动桨翼,基本上就可以实现飞行或悬停的功能。意法半导体高级市场工程师介绍,无人机/多轴飞行器主要部件包括飞行控制以及遥控器两部分。其中飞行控制包括电调/马达控制、飞机姿态控制以及云台控制等。目前主流的电调控制方式主要分成BLDC方波控制以及FOC正弦波控制。 高通和英特尔推的飞控主芯片CES上我们看到了高通和英特尔展示了功能更为丰富的多轴飞行器,他们采用了比微控制器(MCU)更为强大的CPU或是ARM Cortex-A系列处理器作为飞控主芯片。例如,高通CES上展示的Snapdragon Cargo无人机是基于高通Snapdragon芯片开发出来的飞行控制器,它有无线通信、传感器集成和空间定位等功能。Intel CEO Brian Krzanich也亲自在CES上演示了他们的无人机。这款无人机采用了RealSense技术,能够建起3D地图和感知周围环境,它可以像一只蝙蝠一样飞行,能主动避免障碍物。英特尔的无人机是与一家德国工业无人机厂商Ascending Technologies合作开发,内置了高达6个英特的RealSense3D摄像头,以及采用了四核的英特尔凌动(Atom)处理器的PCI-express定制卡,来处理距离远近与传感器的实时信息,以及如何避免近距离的障碍物。这两家公司在CES展示如此强大功能的无人机,一是看好无人机的市场,二是美国即将推出相关法规,对无人机的飞行将有严格的管控。 多轴无人机的EMS/传感器某无人机方案商总经理认为,目前业内的玩具级飞行器,虽然大部分从三轴升级到了六轴MEMS,但通常采用的都是消费类产品如平板或手机上较常用的价格敏感型型号。在专业航拍以及专为航模发烧友开发的中高端无人机上,则会用到质量更为价格更高的传感器,以保障无人机更为稳定、安全的飞行。这些MEMS传感器主要用来实现飞行器的平稳控制和辅助导航。飞行器之所以能悬停,可以做航拍,是因为MEMS传感器可以检测飞行器在飞行过程中的俯仰角和滚转角变化,在检测到角度变化
QFT 飞行控制系统设计 4.1 引言 在飞控系统中,被控对象(如直升机等)往往是非常复杂的多输入多输出系统,具体表现为非线性、时变、高度耦合、高阶、不稳定、模型不确定性等。因此,这对设计一个覆盖整个飞行包线的控制器带来相当大的难度。目前,国内外设计全包线控制器一般有以下几种方法: 增益调度(gain scheduling )、非线性动态逆(Non-Linear Dynamic Inversion )、定量反馈理论(QFT )、自适应控制(AC )等。其中,国内外大多数采用增益调度方法。 本章将介绍一种工程上较为容易实现的强鲁棒控制理论—定量反馈理论(QFT )。重点介绍了MIMO 系统设计QFT 控制器的原理和一般步骤。 4.2 MIMO 系统的QFT 控制器设计概述 定量反馈理论(QFT )是以色列人Horowitz 教授提出的一种强鲁棒控制理论,它针对当对象具有不确定性和存在干扰的情况下,如何利用反馈信息设计出满足一定要求的控制系统这一问题而提出的。QFT 的最初发展首先研究具有不确定性的线性时不变单输入单输出系统(LTI/SISO ),如图4.1所示。其中,P 为不确定控制对象,r 为指令输入,y 为系统输出,1d 和2d 分别表示输入干扰和输出干扰,G 和F 为要设计的控制器和前置滤波器。随着QFT 的理论研究的深入,进一步推广到多输入多输出、非最小相位/不稳定、时变及非线性等系统。LTI/SISO 系统是QFT 研究的基础,而其他的MIMO 系统等都可以通过数学变化转化为等效的LTI/SISO 系统,再进行设计。 y 图4.1 SISO 系统的QFT 控制框图 MIMO 系统QFT 研究的重点就是如何有效地将原控制系统转化成一组等效的MISO 系统,从而可以运用相对成熟的SISO 系统QFT 设计分析,这也是MIMO 系统QFT 设计相比较与SISO 系统设计的最大特点。图4.2给出了两输入两输出系统的等效过程。可以看出原系统是22?系统,等效后变成了4个结构类似的21?子系统。每个系统都有两个输入端,一个输出端。两个输入分别是指令输入和由各子系统之间耦合作用引起的输入,即“干扰”输入。 然后,就可以对每个子系统采用SISO 系统的QFT 设计方法设计对应的控制器。最后,将各子系统的设计结果综合起来就是原系统的设计结果。
目录 1飞行器控制系统的设计过程 (1) 1.1飞行器控制系统的性能指标 (1) 1.2参数分析 (1) 2系统校正前的稳定情况 (3) 2.1校正前系统的伯特图 (3) 2.2校正前系统的奈奎斯特曲线 (3) 2.3校正前系统的单位阶跃响应曲线 (5) 2.4校正前系统的相关参数 (5) 2.4.1 上升时间 (6) 2.4.2超调时间 (7) 2.4.3超调量 (7) 2.4.4 调节时间 (7) 3校正系统 (8) 3.1校正系统的选择及其分析 (8) 3.2验证已校正系统的性能指标 (10) 4系统校正前后的性能比较 (13) 4.1校正前后的波特图 (13) 4.2校正前后的奈奎斯特曲线 (14) 4.3校正前后的单位阶跃响应曲线 (15) 5设计总结与心得 (17) 参考文献 (18)
飞行器控制系统设计 1飞行器控制系统的设计过程 1.1飞行器控制系统的性能指标 飞行器控制系统的开环传递函数 ) 2.361(4500)(+= s s K s G 控制系统性能指标为调节时间s 01.0≤,单位斜坡输入的稳态误差000521.0≤,相角裕度大于85度。 1.2参数分析 由系统开环传递函数可以求得: 令 2n ω= 4500k 所以开环传递函数: 2 ()(361.2) n G s s s ω= + 稳态误差为: ss 2 n n 1361.2e 0.000521lim ()s SG s ζ ωω→= =≤2= 可得832/n rad s ω=,0.217ζ=。 所以,取154k =。 开环传递函数 693000 ()(361.2) G s s s = + 稳态误差 0.005e δ=>
总复习 第一章 飞行动力学 一、概念: 1、体轴系纵轴ox 在飞机对称平面内;速度轴系纵轴a ox 不一定在飞机对称平面内;稳定轴系纵轴ox 在飞机对称平面内,与体轴系纵轴ox 相差一个配平迎角0α。 2、俯仰角θ的测量轴为地轴系横轴g oy ;滚转角φ(倾斜角)的测量轴为体轴系纵轴ox ;偏航角ψ的测量轴为地轴系铅锤轴g oz 。 3、迎角α:空速向量在飞机对称平面内投影与机体纵轴ox 夹角。 以的投影在ox 轴之下为正。 4、β(侧滑角):空速向量v 与飞机对称平面的夹角。以v 处于对称面右为正。 5、坐标系间的关系 机体轴系b S 与地轴系g S 之间的关系描述为飞机姿态角(ψφθ、、); 速度轴系a S 与机体轴系b S 之间的关系描述为气流角(βα、); 速度轴系a S 与地轴系g S 之间的关系描述为航迹角(χμγ、、)。 6、舵偏角符号 升降舵偏角e δ:平尾后缘下偏为正0>e δ,产生低头力矩。0 飞行控制系统的故障诊断与容错控制 周晓宇08010201 聆听姜斌老师的讲座后,我对飞行控制系统的故障诊断与容错控制方面有了初步的了解,并产生了较为浓厚的兴趣。 首先,飞行控制系统的被控对象包括飞艇、飞机、近空间飞行器、火箭、导弹、人造地球卫星、空间探测器、载人飞船、航天站、航天飞机等,而飞机又包含客机、运输机、直升机、无人机、战斗机等类型。我们对飞行控制系统进行飞行控制的主要目的大概有四个方面:(1)稳定飞行,主要指姿态稳定,这是任何飞行器的首要任务;(2)轨迹控制,包括航迹、高度、航向、起飞着陆等;(3)目标跟踪,主要针对目标的跟踪和拦截;(4)轨迹跟踪,主要指队预定轨迹(进场着陆)实时路径规划轨迹。以上是飞行控制系统的一些基本概念,为达到设计者期望的技术指标,需要详细了解飞行器的特性、控制要求、控制方法和验证方法。 其次,在飞行控制系统方面,让我感慨较深的有两个方面,分别是光传飞行控制系统和飞行控制系统的建模问题。 对于光传飞行控制系统,它是飞行控制系统发展中较高级的阶段,和之前出现的简单飞行操纵系统、机械操纵系统、控制增稳系统、电传飞行控制系统相比,它不仅可有效地防御电磁干扰、雷电冲击、核爆辐射、消除各信号通道间的串扰,而且还可以极大地减轻飞机重量,增加飞机上的可用空间,同时这种方法可使光纤传输损耗低、频带宽。可以说,随着计算机技术和控制理论的发展,飞行控制系统的 设计方法也发生了变化,从最初的经典控制方法,发展到了自适应控制、模糊控制、神经网络控制、容错控制等现代控制方法。飞行器结构的复杂化和种类的多样化注定了飞行控制系统必将成为现代控制理论研究的热点领域。 除了光传飞行控制系统外,我对飞行控制系统的建模问题也产生了一些想法。通过建模方程,我们可以把一些抽象的问题用数学模型的方法表示出来,譬如,我们可以建立飞行器姿态测量系统,对飞机的姿态角、航向、转动角速度等使用专业仪器测量后,在多维坐标系中进行问题的分析和研究。又比如,飞机模型的线性化问题,我们可以采用小扰动法将含有扰动运动参数与基准运动参数间差值的高阶小项略去,并同时在平衡点上利用泰勒级数对化简式进行展开并仅保留一次项,由此即可得到雅可比矩阵形式的线性化状态方程。 通过对以上两个例子的分析,我有两点心得体会,一是要学会学以致用,将所学到的知识融会贯通,分类组合,只有这样,才能将看似复杂的问题简单化;其二,就是上面提到过的,大自然中的物理量,绝大部分是模拟量,然而如果我们想对事务进行深入的分析和研究的话,最好的办法还是将它们转化为数字量,其实也就是真实事物的建模问题。 通过这场讲座,我除了对飞行控制系统有了一个大致的了解外,还对飞行系统的故障诊断与容错控制方面有了更深入的了解。 近几年,随着经济的快速发展,民航运载任务越来越重,民航飞机朝着大型、多载重方向发展,飞机系统的复杂性也在不断增加,故 电传操纵系统概况 一、电传操纵系统的概念及发展概况 1、电传操纵系统的概念 电传操纵系统是将从驾驶员的操纵装置发出的信号转换成电信号,通过电缆直接传输到自主式舵机的一种系统。也就是说,电传操纵系统也是一个全时、全权限的“电信号系统+控制增稳”的飞行操纵系统。电传操纵系统是人工操作和自动控制在功能上和操纵方式上较好地融为一体。电传操纵系统主要依靠电信号传递驾驶员的操纵指令,所以这种系统不再含有机械操纵系统。带有机械备份的电传操纵系统成为准电传操纵系统。控制增稳系统是电传操纵系统不可分割的组成部分,只有具备控制增稳功能的电信号系统才能称为电传操纵系统。 2、电传操纵系统发展概况 20世纪前半期,采用闭环反馈原理的自动控制技术作为机械操纵系统的辅助手段,其主要作用是针对已设计好的飞机刚体动力学特性的缺陷进行补偿,实现精确的姿态和航迹控制,减轻驾驶员长期、紧张工作的负担。到了20世纪60年代,飞机的发展遇到了一些重大难题。例如:大型飞机挠性机体气动弹性模态问题,进一步提高战斗机机动性和战斗生存性问题等。这些问题仅靠气动力、结构和动力装置协调设计技术已经不能解决,或者要在性能、重量、复杂性和成本方面付出巨大代价才能得到某种折衷的解决方案。研制设计者将注意力转向采用闭环反馈原理的自动控制技术,通过对一系列单项技术和组合技术的研究、开发和验证,产生了两个具有划时代意义的新飞行控制概念:主动控制技术(ACT)和电传飞行控制(FBW)系统。这两项新技术的出现对飞机的发展产生了巨大的影响。 1.采用主动控制技术的电传操纵系统 采用主动控制技术的电传操纵系统,可使飞机的飞行控制、推力控制和火力控制的主要控制功能综合成为可能,从而极大地改善了飞机的性能。如采用主动控制技术的电传操纵系统后,放宽静稳定性(RSS)控制技术使B-52轰炸机平尾面积减少45%,结构总重量减少6.4%,航程增加了4.3%;使战斗机升阻比提高了8%~15%。机动载荷控制NILC)技术使C-5A运输机翼根弯曲力矩减少30%~50%;使F4E 1 绪论 本章先主要介绍了无人机进无人机的特点,国内外研究现状和发展趋势及这篇文章的主要内容安排。 1.1无人机概述 无人机即无人驾驶飞机,也称为遥控驾驶飞行器,是机上没有驾驶员,靠自身程序控制装置操纵,自动飞行或者由人在地面或母机上进行遥控的无人驾驶飞行器,在它上面装有自动驾驶仪、程序控制系统、遥控与遥测系统、自动导航系统、自动着陆系统等,通过这些系统实现远距离控制飞行。无人机大体上由无人机载体、地面站设备(无线电控制、任务控制、发射回收等起降装置)以及有效负荷三部分组成。 无人机在航空业已有一百年的历史了。第一驾遥控航模飞机于1909年在美国试飞成功。1915年10月德国西门子公司研制成功采用伺服控制装置和指令制导的滑翔炸弹,它被公认为有控的无人机的先驱。世界上第一架无人机是英国人于1917年研制的。这是一架无线电操纵的小型单翼机,由于当时的许多技术问题,所以试验失败。一直到1921年英国才研制成可付诸实用的第一驾靶机。1918年德国也研制成第一驾无人驾驶的遥控飞机。1920年简氏《世界各地飞机》首次提到无人机。20世纪30年代初无线电操纵的无人靶机研制成功。在20世纪40至50年代,无人机逐渐得到了广泛使用,但这时主要是作为靶机使用。世界各国空军于20世纪50年代大量装备了无人驾驶飞机作为空靶。进入20世纪60年代后,美国出于冷战需要,将无人机研究重点放在侦察用途方面,这标志着无人机技术开始进入了以应用需求为牵引的快速发展时代。 由于无人机具有低成本、零伤亡、可重复使用和高机动等优点,因此 深受世界各国军队的广泛欢迎,近年来得到了快速发展。对于无人机而言,其自动飞行控制系统的设计是至关重要的,它的优劣程度直接影响到无人机各项性能(包括起飞着陆性能、作业飞行性能、飞行安全可靠性能、系统的自动化性和可维护性等)。因此,研究无人机的自动飞行控制技术具有十分重要的现实意义,尤其是在军事上的重要性己经得到国内外的高度重视,而无人机飞行控制系统是无人机能够安全、有效地完成复杂战术、战略使命的基本前提,因此迫切需要加强该领域的研究工作。 无人机的研制早在 20 世纪初就开始了,几乎与有人机同步,自30年代国外首次采用无线电操纵的模型飞机作为靶机以后,无人机的发展十分迅速。40年代,低空低速的小型活塞式靶机投入使用。50年代出现了高亚音速和超音速高性能的靶机,世界各国空军开始大量装备无人机作为空靶。60年代以后,随着微电子技术、导航与控制技术的发展,一些国家研制了无人驾驶侦察机,美国率先研制成功无人驾驶侦察机,并开始用于越战。无人机受到越来越多国家的青睐,发展迅猛。在1982年的中东战争中,以色列在贝卡谷地交战中,用“侦察兵”和“猛犬”无人机诱骗叙军的地空导弹的制导雷达开机,侦查获取了雷达的工作参数并测定了其所在位置。无人机的飞速发展是在海湾战争后,以美国为首的多国部队的无人机在海湾战争中成功地完成了战场侦察、火炮校射、通信中继和电子对抗任务。无人机的研制成功和战场运用,揭开了以远距离攻击型智能化武器、信息化武器为主导的“非接触性战争”的新篇章,由此引发了无人机及其飞行控制研究的热潮。 美国、英国、法国、德国、以色列、澳大利亚等国都针对这个领域投入了相当的研究力量。究其原因,用无人机替代有人驾驶飞机可以降低生产成本,便于运输、维修和保养,而且不用考虑人的生理和心理承受极限。未来无人机在军事和民事上都有广泛的应用前景。在军事领域,采用无人飞行控制系统的故障诊断与容错控制
飞机电传操纵系统
(完整版)无人机飞行控制系统仿真研究本科生毕业论文
相关主题
文本预览