AAN 105-03DESIGNING A POTENTIOSTATIC CIRCUIT
Introduction
In a three-electrode sensor, each electrode has a specific use:
? The working electrode responds to the target gas, either oxidising or reducing the gas, creating a current flow that is proportional to the gas concentration. This current must be supplied to the sensor through the counter electrode.
? The reference electrode is used by the potentiostatic circuit to maintain a fixed potential at the working electrode. The working electrode potential must be maintained at the same potential as the reference electrode potential for unbiased sensors, or with an offset for sensors that require biasing.
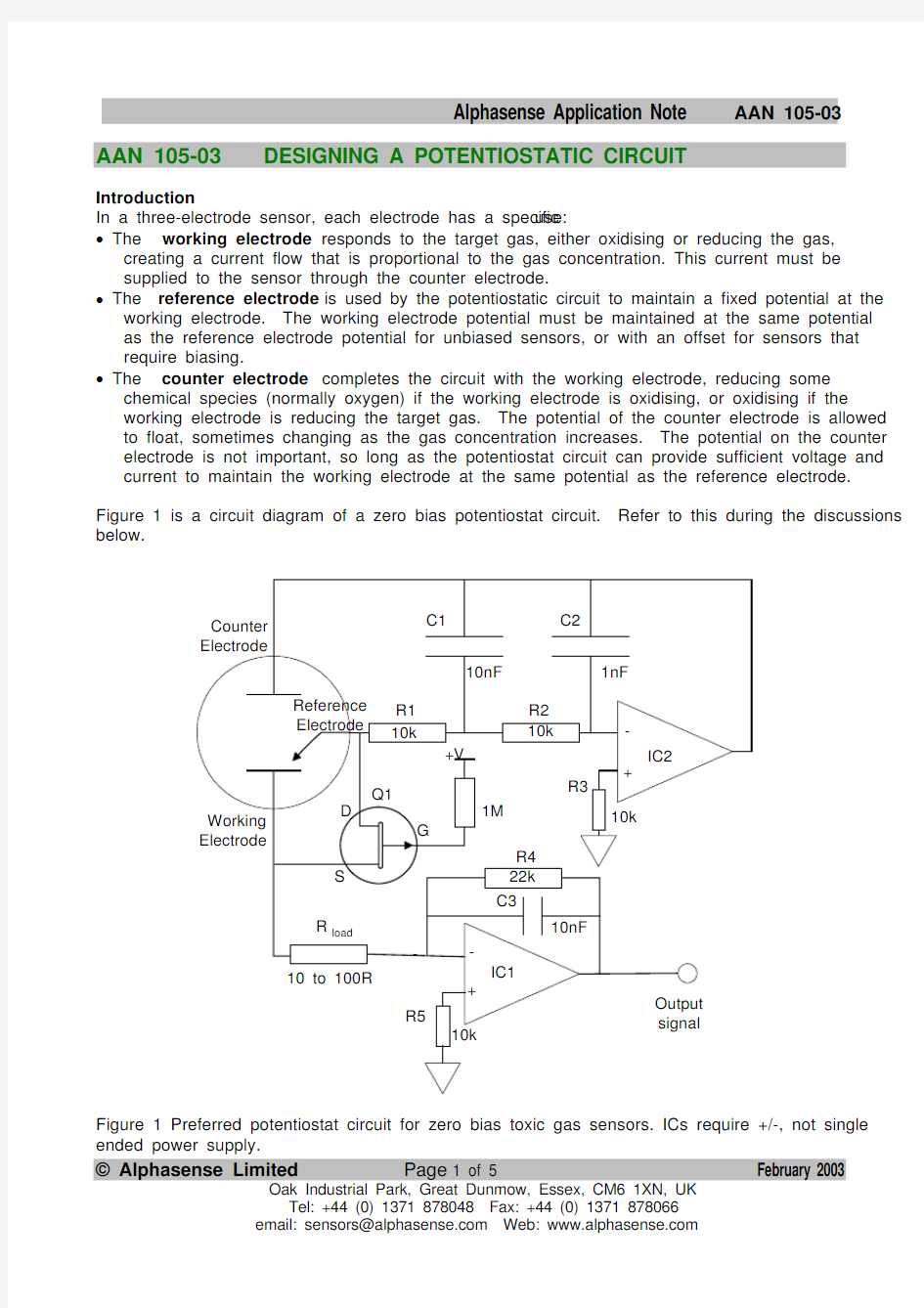
? The counter electrode completes the circuit with the working electrode, reducing some chemical species (normally oxygen) if the working electrode is oxidising, or oxidising if the working electrode is reducing the target gas. The potential of the counter electrode is allowed to float, sometimes changing as the gas concentration increases. The potential on the counter electrode is not important, so long as the potentiostat circuit can provide sufficient voltage and current to maintain the working electrode at the same potential as the reference electrode. Figure 1 is a circuit diagram of a zero bias potentiostat circuit. Refer to this during the discussions below.
Figure 1 Preferred potentiostat circuit for zero bias toxic gas sensors. ICs require +/-, not single ended power supply.
? Alphasense Limited Page 1 of 5 February 2003
A typical potentiostat circuit consists of three parts:
1 Control circuit with bias voltage, if required
2 Current measuring circuit
3Shorting FET to connect the working electrode to the reference electrode when power is off Control Circuit
The control op amp (IC2 in figure 1) provides the current to the counter electrode to balance the current required by the working electrode.
The inverting input into IC2 is connected to the reference electrode and must not draw any significant current from the reference electrode. An op amp with an input bias current of less than 5nA is recommended.
When switching on the circuit, the depletion mode JFET (Q1 in Fig 1)goes to a high impedance state and IC2 provides the current to maintain the working electrode at the same potential as the reference electrode. Any offset due to the input offset voltage in IC2 will therefore cause a sudden shift in potential at switch-on. Toxic gas sensors have a large capacitance, so significant currents can flow for small potential shifts, so ensure that your op amp has a low offset voltage, certainly less than 1 mV and preferably less than 100μV; also check the op amp offset voltage at the maximum usage temperature.
Typically, for an oxidisable gas (such as CO) with a platinum reference electrode, the counter electrode will be -300 to -400mV from the ground potential. However, if hydrogen ions rather than oxygen molecules are reduced, then the potential could be as large as -1.05V. Also, reducing gases (such as NO2 or Chlorine) force the counter electrode to oxidise water, evolving oxygen; in this case the potential relative to the reference electrode is between +600 and +800 mV, depending on the type of reference electrode. Therefore, you must allow IC2 enough voltage swing to drive the counter electrode to the required potential and with sufficient current demanded by the sensor. If the circuit is unable to do this, then extreme non-linearities will occur at higher concentrations. It is best to allow ±1.1V swing on IC2 (plus any imposed bias voltage). This means that for a CO or H2S sensor the counter electrode wants to be typically -350 mV below the ground point, so IC2 needs a negative supply. If you are using a single ended low voltage power supply, pay particular attention to the available output swing on the op amp at the required current.
Table 1 below shows the maximum generated steady state current for each type of sensor. At full scale no sensor generates more than 210μA, but allow at least 500μA for a general purpose circuit, although this can be decreased for specific, well tested sensor/ circuit combinations. Beware- when switching the circuit ON in the presence of an electroactive gas or when a new sensor is first connected, the sensor may give a surge current of several mA that may cause IC1 to clamp, depending on the current drive capacity of IC1; it is unlikely that IC1 can maintain the virtual earth on its inverting input with a high feedback resistor during such a high current transient. Always connect the sensor before powering the circuit.
Circuit stability and noise reduction in the control circuit relies on R1, R2, C1 and C2; C2 may not be necessary for certain op amps. If eliminating C2, then C1 may be increased- between 10 and 100 nF. Suggested op amps are OP90 (single op amp) and OP 296 (dual op amp).? Alphasense Limited Page 2 of 5 February 2003
Bias voltage
Normally, Alphasense toxic gas sensors are operated in the zero bias mode; however, certain sensors, such as NO sensors, require a bias voltage: typically ±150 or 300mV for an NO sensor. Alternatively, sensor cross-sensitivity to certain gases can be enhanced by adding a bias voltage.
BEWARE! performance can also be degraded if you bias incorrectly! Remember that biasing a normally unbiased sensor may damage the sensor and certainly voids the sensor warranty. Consult Alphasense for further advice.
If you wish to inject a bias voltage then also ensure that your bias voltage is stable: changes of even a few mV can affect sensitivity to gases and rapid changes in the bias voltage by only a mV will generate transient effects for up to hours on the sensor output. A simple method of biasing the sensor is shown in figure 2 below. The 10K load resistor to ground can be removed to reduce the current on V bias.
Biasing should be maintained when the instrument is switched off - this is normally accomplished by using a button cell battery that remains on at all times. In this case, the input offset of IC2 is not critical, but its drift with temperature etc. must be kept small.
Current Measuring Circuit
The measuring circuit is a single stage op amp (IC1) in a transimpedance configuration; the sensor current is reflected across R4, generating an output voltage relative to the virtual earth. C3 reduces high frequency noise. It is sometimes desirable to use two opamp stages to give the required output; the first stage should use a low value for R4 to allow the circuit to oppose the sensor current in transient conditions, followed by a second voltage gain stage to give the required output. The input offset voltage of IC1 will add to the sensor bias voltage (as the working electrode will be offset from 0V) so the input offset should be kept low. Remember that the generated current can be either positive or negative: sensors that oxidise at the working electrode (e.g. CO) generate a ? Alphasense Limited Page 3 of 5 February 2003
current into IC2, while reducing working electrodes (e.g. Cl2 or NO2) sink a current. So for the second case, ensure that IC2 has adequate current sinking capability.
The measuring circuit uses a combination of the (load resistor (R load) plus internal sensor resistance) and the (internal sensor capacitance) to establish an RC circuit; the selection of R load is a compromise between fastest response time (low resistance R load) and best noise (high resistance R load): this RC circuit affects both the rms noise and the response time: the response time increases linearly with increasing R load resistance, while noise decreases rapidly with increasing R load resistance. If you need highest resolution, then forfeit fast response time. Likewise, if fast response time is critical, then reduce the resolution of your display or sample the signal faster and average over several readings in software to eliminate jitter. Due to the low impedance nature of the circuit, it is better to use an opamp with low noise current (usually at the expense of noise voltage)to get the best overall noise performance.
As sensor current flows through R load, there will be a small change to the sensor bias potential. This has the effect of increasing the sensor settling time as the sensor will require a short time to re-stabilise when gas is applied, but this transient will normally not be seen except at high gas concentrations and high R load resistance.
Refer to Table 1 below to calculate the required gain for your measuring circuit. If your detector/ instrument does not use the full scale of the sensor, then simply multiply the Sensitivity by your Range to determine the maximum current from the sensor. Since the sensitivity is the typical value, allow 20% more than the typical full scale output into your A/D converter.
Sensor Full
Scale
(ppm)Sensitivity
(nA/ppm)
(typical)
Full Scale
output
(μA)
Full Scale
output
(V)
Calibration
point
(ppm)
CO-BF, CO-B1, CO-BX1,000100100 1.00 400 CO-AF1,00070700.70400 CO-AX2,00065130 1.30400 CO-AE 10,00030300 3.00 2,000 CO-DF1,00040740.74400 H2S-AH 501,200600.60 20 H2S-BH502,000850.8520 H2S-A1 100750750.75 20 H2S-B1200370740.7420 H2S-BE2,00090180 1.80 400 H2S-AE2,000105210 2.10400 H2S-D1100140140.1420 SO2-AF20500100.10 20 SO2-BF100350350.3520 SO2-AE2,00070140 1.40400 NO2-A1 20-3508-0.08 10 NO2-B120-75022-0.2210 NO2-AE200-35070-0.75100 NO-A1,-B1250400100 1.0050 NO-AE1,000100100 1.00400 Cl2-A120-3708-0.0710 CL2-B120-900220.2210 Table 1. List of output parameters and calibration point for Alphasense toxic gas sensors.
? Alphasense Limited Page 4 of 5 February 2003
Shorting FET
It is normal practice to add a shorting FET for unbiased sensors so that the reference and working electrodes are shorted together (with a residual resistance of a few tens of ohms) when power is removed from the circuit. This ensures that the working electrode is maintained at the same potential as the reference electrode when the circuit is switched off. The shorting FET is normally open circuit as long as power is applied. This “zero bias” state ensures that when you switch the circuit back on, the sensor is ready immediately. If you do not use a shorting FET and leave the sensor open circuit when the circuit is off, the toxic gas sensor will take a few hours to stabilise when next switched on.
If you are supplying a bias voltage through IC2, then when you switch off the circuit, the sensor will be zero biased and hence when you reapply a bias voltage it will take a significant time (up to several hours) for the sensor to re-establish equilibrium. It is recommended that, for biased circuits, the bias voltage be maintained on at all times and the shorting FET not used. This will not affect the operating life of the sensor.
The JFET (Q1) should be a p-type FET. Recommended FET types include surface mount or TO-92 packages as per Table 2 below.
Manufacturer Product Code Type
Siliconix SST177Surface Mount
Siliconix J175TO-92
Siliconix J176TO-92
Siliconix J177TO-92
Fairchild J175TO-92
Table 2. Recommended p-FETs for short circuiting reference and working electrodes when the potentiostat circuit is off.
Noise, RFI/EMI Screening
Ideally, the measuring and controlling op amps in a potentiostat are fitted directly underneath the sensor to keep the shortest leads because of the low impedance and low sensor currents. Alphasense Application Note AAN 103 gives further advice on reducing noise and improving RFI/EMI screening.
Sensor Calibration
Note that toxic gas sensor sensitivities are variable,typically ±15%. So you must calibrate in software to correct for sensor-to-sensor sensitivity variations. Alphasense maintains a database of the sensitivity of every sensor tested at Alphasense, but remember that sensitivity will drift downwards with time, typically 0.5% to 2% per month, depending on the sensor type, relative humidity and gas concentration/ temperature conditions. See Application Note AAN 108 for more information.
It is also normal to correct for temperature dependence of the sensitivity; zero current is not normally temperature corrected, but for measurements requiring high accuracy at low concentrations, contact Alphasense for advice.
? Alphasense Limited Page 5 of 5 February 2003
一种霍尔电流传感器的电路设计 设计了一种零磁通型霍尔电流传感器,可广泛应用于交流变频驱动、焊接电源、开关电源、不间断电源等领域。该零磁通型霍尔电流传感器通过砷化镓霍尔元件检测由通电电流产生的磁场,继而有效地检测被测电流。 由于霍尔元件产生的霍尔电势很微弱,而且还存在较大的失调电压,因此对霍尔电压的放大和对不等位电势的补偿是该设计的两个主要需要解决的问题,而且霍尔元件中载流子浓度等随温度变化而变化,因此还需用温度补偿电路对其温度补偿。 1 系统设计框架 系统分为4个部分:1)霍尔元件的供电电路,由电压基准(电流基准)芯片为霍尔片提供工作电流; 2)霍尔元件及磁芯,将感应片感应的磁场(该磁场由通电电流产生)转化为霍尔电压;3)放大电路,将微弱的霍尔电压进行放大;4)反馈部分,利用了磁平衡原理:一次侧电流所产生的磁场,通过二次线圈电流进行补偿,使磁芯始终处于零磁通工作状态。其系统总流程图如图1所示。 2 系统硬件电路设计 系统由±5 V的稳压源供电。用一片电压基准芯片REF3012为砷化镓系列的霍尔元件HW300B提供基准电压。HW300B是一款可采用电压模式供电和电流模式供电的霍尔元件,HW300B放在开有气隙的集磁环的气隙里,并用胶水加以固定(霍尔元件和集磁环相对位置如果发生变化,会影响产生的霍尔电势的大小)。霍尔元件的输出接至仪器放大器AD620,作为放大器的差模出入端和共模输入端。放大器的增益可通过调节1、8引脚之间的10 kΩ的电位器改变。放大器的输出接反馈线圈,该反馈线圈绕在集磁环上,其绕线方向能使通过它的电流产生的磁场与集磁环收集到的磁场方向相反。反馈线圈末端放1个75 kΩ的精阻接地,可以通过测量精阻两端的电压,计算反馈线圈中的电流,进而推算穿过集磁环中心的被测电流的大小。其具体电路图如图2所示。 2.1 REF3012 以SOT23-3封装的REF3012是一个高精度、低功耗、低电压差电压参考系列芯片。REF3012小尺寸和低功耗(最大50μA)非常适用于便携式和电池供电。它不需要负载电容,但对任何容性负载很稳定。因磁敏型霍尔元件很容易受温度的影响,可以采用恒流源供电以减小其温度系数。在该系统设计中,REF3012的输入引脚1接+5 V电源,并接10μF的旁路电容至地,该旁路电容对电源进行滤波,提高电源稳定性。而其输出引脚2接到HW300B的引脚1,并且也接1O μF的旁路电容至地,GND(地)引脚3接地。由于系统设计要求REF3012为HW300B提供2.5 V的基准电压,根据REF3012的数据资料可知,当输入电压为5 V 时,输出电压为2.5 V,所以REF3012引脚1接+5 V电压。 2.2 霍尔元件 本设计采用砷化镓系列的HW300B型霍尔元件,输出霍尔电压范围122~204mV,输入、输出阻抗为240~550 Ω,补偿电压为-7~7 mV,温度系数为-1.8%/℃。其输入可采用电压模式供电,也可采用电流模式供电。这里采用电压模式供电,即就是HW300B的引脚1、3为控制输入端,而引脚2、4为霍尔电压输出端。 霍尔元件是将磁场转换为电信号的线性磁敏元件,霍尔输出电压 式中,S为乘积灵敏度,mV/(mT·mA);Ic为工作电流,mA;B为磁感应强度,mT。 本设计中,将霍尔元件放进开有气隙的集磁环的气隙里,并将霍尔元件和集磁环固定,这样可以感应出更大、更稳定的霍尔电势。式(1)中,当S与Ic一定,则Vh与B有直接线性关系。通电导体周围必然产生磁场,根据安培定律,电流与磁场的关系式∮BdI=μ0I0得:
霍尔电流传感器的应用场合 1、继电保护与测量:在工业应用中,来自高压三相输电线路电流互感器的二次电流,如分别经三只霍尔电流传感器,按比例转换成毫伏电压输出,然后再经运算放大器放大及有源滤波,得到符合要求的电压信号,可送微机进行测量或处理。在这里使用霍尔电流传感器可以很方便地实现了无畸变、无延时的信号转换。 2、在直流自动控制调速系统中的应用:在直流自动控制调速系统中,用霍尔电流电压传感器可以直接代替电流互感器,不仅动态响应好,还可实现对转子电流的最佳控制以及对晶闸管进行过载保护。 3、在逆变器中的应用:在逆变器中,用霍尔电流传感器可进行接地故障检测、直接侧和交流侧的模拟量传感,以保证逆变器能安全工作。 4、在不间断电源中的应用:在该应用中,用霍尔电流传感器进行控制,保证逆变电源正常工作。使用霍尔电流传感器1发出信号并进行反馈,以控制晶闸管的触发角,霍尔电流传感器2发出的信号控制逆变器,霍尔电流传感器3控制浮充电源。由于其响应速度快,霍尔电流传感器特别适用于计算机中的不间断电源。 5、在电子点焊机中的应用:在电子点焊机电源中,霍尔电流传感器起测量和控制作用。它的快速响应能再现电流、电压波形,将它们反馈到可控整流器A、B,可控制其输出。用斩波器给直流迭加上一个交流,可更精确地控制电流。用霍尔电流传感器进行电流检测,既可测量电流的真正瞬时值,又不致引入损耗。 6、用于电车斩波器的控制:电车中的调速是由调整电压实现的。而将霍尔电流传感器和其它元件配合使用,并将传感器的所有信号输入控制系统,可确保电车正常工作。 7、在交流变频调速电机中的应用:用变频器来对交流电机实施调速,在世界各发达国家已普遍使用,且有取代直流调速的趋势。用变频器控制电机实现调速,可节省10%以上的电能。在变频器中,霍尔电流传感器的主要作用是保护昂贵的大功率晶体管。由于霍尔电流传感器的响应时间往往小于5μs,因此,出现过载短路时,在晶全管未达到极限温度之前即可切断电源,使晶体管得到可靠的保护。 8、用于电能管理:霍尔电流传感器,可安装到配电线路上进行负载管理。霍尔电流传感器的输出和计算机连接起来,对用电情况进行监控,若发现过载,便及时使受控的线路断开,保证用电设备的安全。用这种装置,也可进行负载分配及电网的遥控、遥测和巡检等。
一、霍尔电流电压传感器、变送器的基本原理与使用方法 1.霍尔器件 霍尔器件是一种采用半导体材料制成的磁电转换器件。如果在输入端通入控 制电流I C ,当有一磁场B穿过该器件感磁面,则在输出端出现霍尔电势V H 。 如图1-1所示。 霍尔电势V H 的大小与控制电流I C 和磁通密度B的乘积成正比,即:V H =K H I C Bsin Θ 霍尔电流传感器是按照安培定律原理做成,即在载流导体周围产生一正比于该电流的磁场,而霍尔器件则用来测量这一磁场。因此,使电流的非接触测量成为可能。 通过测量霍尔电势的大小间接测量载流导体电流的大小。因此,电流传感器经过了电-磁-电的绝缘隔离转换。 2.霍尔直流检测原理 如图1-2所示。由于磁路与霍尔器件的输出具有良好的线性关系,因此霍尔 器件输出的电压讯号U 0可以间接反映出被测电流I 1 的大小,即:I 1 ∝B 1 ∝U 我们把U 0定标为当被测电流I 1 为额定值时,U 等于50mV或100mV。这就制成 霍尔直接检测(无放大)电流传感器。
3.霍尔磁补偿原理 原边主回路有一被测电流I1,将产生磁通Φ1,被副边补偿线圈通过的电流I2所产生的磁通Φ2进行补偿后保持磁平衡状态,霍尔器件则始终处于检测零磁通的作用。所以称为霍尔磁补偿电流传感器。这种先进的原理模式优于直检原理模式,突出的优点是响应时间快和测量精度高,特别适用于弱小电流的检测。霍尔磁补偿原理如图1-3所示。 从图1-3知道:Φ 1=Φ 2 I 1N 1 =I 2 N 2 I 2=N I /N 2 ·I 1 当补偿电流I 2流过测量电阻R M 时,在R M 两端转换成电压。做为传感器测量电 压U 0即:U =I 2 R M 按照霍尔磁补偿原理制成了额定输入从0.01A~500A系列规格的电流传感器。 由于磁补偿式电流传感器必须在磁环上绕成千上万匝的补偿线圈,因而成本增加;其次,工作电流消耗也相应增加;但它却具有直检式不可比拟的较高精度和快速响应等优点。 4.磁补偿式电压传感器 为了测量mA级的小电流,根据Φ 1=I 1 N 1 ,增加N 1 的匝数,同样可以获得高磁 通Φ 1 。采用这种方法制成的小电流传感器不但可以测mA级电流,而且可以测电压。 与电流传感器所不同的是在测量电压时,电压传感器的原边多匝绕组通过串 联一个限流电阻R 1,然后并联连接在被测电压U 1 上,得到与被测电压U 1 成比 例的电流I 1 ,如图1-4所示。
温度传感器的应用及原理 温度测量应用非常广泛,不仅生产工艺需要温度控制,有些电子产品还需对它们自身的温度进行测量,如计算机要监控CPU的温度,马达控制器要知道功率驱动IC的温度等等,下面介绍几种常用的温度传感器。 温度是实际应用中经常需要测试的参数,从钢铁制造到半导体生产,很多工艺都要依靠温度来实现,温度传感器是应用系统与现实世界之间的桥梁。本文对不同的温度传感器进行简要概述,并介绍与电路系统之间的接口。 热敏电阻器 用来测量温度的传感器种类很多,热敏电阻器就是其中之一。许多热敏电阻具有负温度系数(NTC),也就是说温度下降时它的电阻值会升高。在所有被动式温度传感器中,热敏电阻的灵敏度(即温度每变化一度时电阻的变化)最高,但热敏电阻的电阻/温度曲线是非线性的。表1是一个典型的NTC热敏电阻器性能参数。 这些数据是对Vishay-Dale热敏电阻进行量测得到的,但它也代表了NTC热敏电阻的总体情况。其中电阻值以一个比率形式给出(R/R25),该比率表示当前温度下的阻值与25℃时的阻值之比,通常同一系列的热敏电阻器具有类似的特性和相同电阻/温度曲线。以表1中的热敏电阻系列为例,25℃时阻值为10KΩ的电阻,在0℃时电阻为28.1KΩ,60℃时电阻为4.086KΩ;与此类似,25℃时电阻为5KΩ的热敏电阻在0℃时电阻则为 14.050KΩ。 图1是热敏电阻的温度曲线,可以看到电阻/温度曲线是非线性的。
虽然这里的热敏电阻数据以10℃为增量,但有些热敏电阻可以以5℃甚至1℃为增量。如果想要知道两点之间某一温度下的阻值,可以用这个曲线来估计,也可以直接计算出电阻值,计算公式如下: 这里T指开氏绝对温度,A、B、C、D是常数,根据热敏电阻的特性而各有不同,这些参数由热敏电阻的制造商提供。 热敏电阻一般有一个误差范围,用来规定样品之间的一致性。根据使用的材料不同,误差值通常在1%至10%之间。有些热敏电阻设计成应用时可以互换,用于不能进行现场调节的场合,例如一台仪器,用户或现场工程师只能更换热敏电阻而无法进行校准,这种热敏电阻比普通的精度要高很多,也要贵得多。 图2是利用热敏电阻测量温度的典型电路。电阻R1将热敏电阻的电压拉升到参考电压,一般它与ADC的参考电压一致,因此如果ADC的参考电压是5V,Vref 也将是5V。热敏电阻和电阻串联产生分压,其阻值变化使得节点处的电压也产生变化,该电路的精度取决于热敏电阻和电阻的误差以及参考电压的精度。
磁阻式传感器KMZ41的特点: 内部包含有两个有磁阻构成的、位置成正交的、独立的电桥(Wheatstone Bridge)。其内部结构如下图所示: 将KMZ41置于有X轴、Y轴构成的平面上,当旋转磁场强度变化时,KMZ41就会产生两路正弦输出的信号,两信号的相位差就代表芯片轴向与磁场方向的夹角a,输出信号波形如下图所示: 图1 图2 图1为KMZ41产生的两路正弦输出信号;图2为芯片轴向与磁场方向的夹角。UZZ9001的内部结构与工作原理: UZZ9001的芯片内部包括A/D转换器1和A/D转换器2、滤波器、算法逻辑、SPI接口、时钟振荡器、;逻辑控制及复位等。UZZ9001Y与KMZ41连接,能够将磁阻式传感器KMZ41输出的两个有相位差的正弦信号转换成数字信号输出,与微控制器配套构成一个角度测量系统。 *
角度传感器部分设计: 方案一 由UZZ9000和KMZ41构成的角度检测电路: UZZ9000为线性电压输出式角度传感器调理器电路,输出电压与被测角度信号成正比;测量角度的范围是0~180°,且在0~100°范围内;测量误差小于±0.45°分辨力达0.1°;测量范围和输出零点均可调节;电源电压范围为+4.5~+5.5V;电源电流为10mA;工作温度范围是-40~+150℃。 由UZZ9000和KMZ41构成的电压输出式角度检测电路如图所示。改变R2和R3的比值,可以调节传感器1的偏移量;改变R4和R5的阻值,可以调节传感器2的偏移量;改变R6和R7的比值,可以调节零点偏移;改变R8和R9的比值;可以调节测量角度范围。电阻R2~R9可以采用电位器代替。电路输出电压送至数字电压表或者微控制器系统,即可显示出被测角度值。该电路可广泛用于发动机凸轮/曲轴速度及位置检测、节流阀控制、转向操作控制、汽车中的ABS系统等领域。 注:1.设置角度范围。在UZZ9000的引脚端13加上不同的外部电压可以选择0~30到0~180共16个不同的角度范围。
传感器应用电路设计 电子温度计 学校:贵州航天职业技术学院 班级:2011级应用电子技术 指导老师: 姓名: 组员:
摘要 传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。 本文将介绍一种基于单片机控制的数字温度计。在件方面介绍单片机温度控制系统的设计,对硬件原理图做简洁的描述。系统程序主要包括主程序、读出温度子程序、温度转换命令子程序、计算温度子程序、显示数据刷新子程序。软硬件分别调试完成以后,将程序下载入单片机中,电路板接上电源,电源指示灯亮,按下开关按钮,数码管显示当前温度。由于采用了智能温度传感器DS18B20,所以本文所介绍的数字温度计与传统的温度计相比它的转换速率极快,进行读、写操作非常简便。它具有数字化输出,可测量远距离的点温度。系统具有微型化、微功耗、测量精度高、功能强大等特点,加之DS18B20内部的差错检验,所以它的抗干扰能力强,性能可靠,结构简单。 随着科技的不断发展,现代社会对各种信息参数的准确度和精确度的要求都有了几何级的增长,而如何准确而又迅速的获得这些参数就需要受制于现代信息基础的发展水平。在三大信息信息采集(即传感器技术)、信息传输(通信技术)和信息处理(计算机技术)中,传感器属于信息技术的前沿尖端产品,尤其是温度传感器技术,在我国各领域已经引用的非常广泛,可以说是渗透到社会的每一个领域,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量,因此研究温度的测量方法和装置具有重要的意义。 测量温度的关键是温度传感器,温度传感器的发展经历了三个发展阶段:①传统的分立式温度传感器②模拟集成温度传感器③智能集成温度传感器。 目前的智能温度传感器(亦称数字温度传器)是在20世纪90年代中期问世的,它是微电子技术、计算机技术和自动测试技术(ATE)的结晶,特点是能输出温度数据及相关的温度控制量,适配各种微控制器(MCU)。社会的发展使人们对
霍尔传感器使用说明书 简要说明: 一、长尺寸:32mm X宽11mm X高20mm 二、主要芯片:LM393、3144霍尔传感器 三、工作电压:直流5伏 四、特点: 1、具有信号输出指示。 2、单路信号输出。 3、输出有效信号为低电平。 4、灵敏度可调(精调)。 5、有磁场切割就有信号输出
6、电路板输出开关量!(可直接接单片机) 7、可用于电机测速/位置检测等场合 适用场合:单片机学习、电子竞赛、产品开发、毕业设计。。。 【图片展示】
【与单片机连接测试程序】
/******************************************************************** 汇诚科技 实现功能:此版配套测试程序 使用芯片:AT89S52 晶振:11.0592MHZ 波特率:9600 编译环境:Keil 作者:zhangxinchun 淘宝店:汇诚科技 【声明】此程序仅用于学习与参考,引用请注明版权和作者信息! *********************************************************************/ /******************************************************************** 说明:1、当测量浓度大于设定浓度时,单片机IO口输出低电平 *********************************************************************/ #include
用于粮仓领域的智能温度传感器的设计 摘要: 近年来随着计算机在社会领域的渗透, 单片机的应用正在不断地走向深入, 同时带动传统控制检测日新月益更新。在实时检测和自动控制的单片机应用系统中,单片机往往是作为一个核心部件来使用,仅单片机方面知识是不够的,还应 根据具体硬件结构,以及针对具体应用对象特点的软件结合,以作完善。 系统以AT89C51 单片机为控制核心,利用新型一线制温度传感器DS18B20 测量温度值,实现粮仓环境温度的检测和报警。本文给出了由AT89C51 单片机和 DS18B20 构成的单总线温度测量系统的硬件电路及软件流程图。该系统具有测点多、精度高、速度快、稳定性好、报警及时等特点,也可应用于其它相关的温度控制系统,通用性较强。 关键词:一线总线;DS18B20;AT89C51;数字温度传感器 Abstract:The system for the control of the core is AT89C51,the temperature sensors DS18B20 is used to measure temperature and this system can realize ambient temperature measurement and alarm. This article introduces the hardware circuit which the software flow chart constitutes by AT89C51 monolithic integrated circuit and DS18B20. This system has many measuring point, high-precision, wide range of temperature monitoring, good stability and alarms timely, it may also be applied in other related temperature control system and the versatility is strong. Keywords:1-Wire TM;DS18B20;AT89C51;Digit Temperature Densor
4.2.2霍尔传感器的测速电路设计 首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。 其次设计一个单片机小系统,利用单片机的定时器和中断系统对脉冲信号进行测量或计数。 再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。要求霍尔传感器转速为0~5000r/min。 霍尔测速模块论证与选择 采用霍尔传感器;选型号为CHV-25P/10的霍尔传感器,其额定电压为10v,输出信号5v/25mA,电源为12~15v。体积大,价格一般为40~120元之间不等。性价比较高 计数器模块论证与选择 采用片内的计数器。其优点在于降低单片机系统的成本。每到一个脉冲将会产生一个T1的计数,在T0产生的100ms中断完成后,T1的中断溢出次数就是所需要计的脉冲数。特点在于:使用了内部的T1作为外部脉冲的计数器,并且,为了避免计数器的溢出,将T1的初值设为0。 显示模块论证与选择 采用LCD液晶显示器作为显示模块核心。LCD显示器工作原理简单,编程方便,节能环保。 报警模块论证与选择 采用蜂鸣器与发光二极管作为声光报警主要器件。该方案不论在硬件和焊接方面还是在编写软件方面都简单方便,而且成本低廉。 电源模块论证与选择 采用交流220V/50Hz电源转换为直流5V电源作为电源模块。 该方案实施简单,电路搭建方便,可作为单片机开发常备电源使用。 单片机模块论证与选择 选用P89C51的单片机速度极快、功耗低、体积小、资源丰富,有各种不同的规格,最快的达100MPS ,引脚还可编程确定功能 选用51系列的单片机,是因为51的架构十分典型。而且: 1.价格便宜; 2.开发手段便宜; 3.自己动手焊接相对容易。 转速测量方案论证
东北石油大学 课程设计 2012年6 月25
任务书 课程传感器课程设计 题目半导体传感器应用电路设计 专业测控技术与仪器姓名学号 主要内容: 利用温度传感器和热电偶设计制作一个温度测量系统。参考利用半导体温度传感器AD590和单片机技术设计制作一个显示室温的数字温度计的设计提示与分析。进一步了解有关温度传感器的工作原理,制定设计方案,确定温度传感器的型号等参数,掌握温度的检测方法。 基本要求: 1、详细了解所选用的温度传感器的工作原理,工作特性等 2、设计合理的信号调理电路,并列出制作该装置的元器件。 主要参考资料: [1]刘爱华,满宝元.传感器原理与应用技术[M].北京:人民邮电出版社,2006.45-48. [2]王雪文,张志勇.传感器原理及应用[M].北京:航空大学出版社,2004.27-34. [3]张福学.现代实用传感器电路[M].北京:中国计量出版社,1997.16-24. [4]缪家鼎,徐文娟,牟同升.光电技术[M].杭州:浙江大学出版社,1987.22-27. 完成期限2012.6.25—2012.6.29 指导教师 专业负责人 2012年6 月25 日
摘要 传感器属于信息技术的前沿尖端产品,尤其是温度传感器被广泛用于工农业生产、科学研究和生活等领域,数量高居各种传感器之首。半导体传感器是利用某些半导体的电阻随温度变化而变化的特性制成的。半导体具有很宽的温度反应特性,各种半导体的温度反应区段不同。利用半导体温度传感器AD590 设计制作一个温度测量系统,AD590是一种集成温度传感器,其实质是一种半导体集成电路。集成温度传感器的线性度好、精度适中、灵敏度高、体积小、使用方便,得到广泛应用。集成温度传感器的输出形式分为电压输出和电流输出两种。 关键词:关键词传感器;半导体;温度传感器;AD590
课程设计报告书
2.概述 2.1系统组成框图 系统由传感器、信号预处理电路、处理器、显示器和系统软件等部分组成。传感器部分采用霍尔传感器,负责将电机的转速转化为脉冲信号。信号预处理电路包含待测信号放大、波形变换、波形整形电路等部分,其中放大器实现对待测信号的放大,降低对待测信号的幅度要求,实现对小信号的测量;波形变换和波形整形电路实现把正负交变的信号波形变换成可被单片机接受的TTL/CMOS兼容信号。处理器采用AT89C51单片机,显示器采用8位LED数码管动态显示。本课题采用的是以8051系列的A T89C51单片机为核心开发的霍尔传感器测转速的系统。系统硬件原理框图如图1所示: 图1 系统框图 2.2系统工作原理 转速是工程上一个常用的参数,旋转体的转速常以每分钟的转数来表示。其单位为 r/min。由霍尔元件及外围器件组成的测速电路将电动机转速转换成脉冲信号,送至单片机AT89C51的计数器 T0进行计数,用T1定时测出电动机的实际转速。此系统使用单片机进行测速,采用脉冲计数法,使用霍尔传感器获得脉冲信号。其机械结构也可以做得较为简单,只要在转轴的圆盘上粘上两粒磁钢,让霍尔传感器靠近磁钢,机轴每转一周,产生两个脉冲,机轴旋转时,就会产生连续的脉冲信号输出。由霍尔器件电路部分输出,成为转速计数器的计数脉冲。控制计数时间,即可实现计数器的计数值对应机轴的转速值。单片机CPU将该数据处理后,通过LED显示出来。
2.2.1霍尔传感器 霍尔传感器是对磁敏感的传感元件,由磁钢、霍耳元件等组成。测量系统的转速传感器选用SiKO 的 NJK-8002D 的霍尔传感器,其响应频率为100KHz ,额定电压为5-30(V )、检测距离为10(mm )。其在大电流磁场或磁钢磁场的作用下,能测量高频、工频、直流等各种波形电流。该传感器具有测量精度高、电压范围宽、功耗小、输出功率大等优点,广泛应用在高速计数、测频率、测转速等领域。输出电压4~25V ,直流电源要有足够的滤波电容,测量极性为N 极。安装时将一非磁性圆盘固定在电动机的转轴上,将磁钢粘贴在圆盘边缘,磁钢采用永久磁铁,其磁力较强,霍尔元件固定在距圆盘1-10mm 处。当磁钢与霍尔元件相对位置发生变化时,通过霍尔元件感磁面的磁场强度就会发生变化。圆盘转动,磁钢靠近霍尔元件,穿过霍尔元件的磁场较强,霍尔元件输出低电平;当磁场减弱时,输出高电平,从而使得在圆盘转动过程中,霍尔元件输出连续脉冲信号。这种传感器不怕灰尘、油污,在工业现场应用广泛。 2.2.2转速测量原理 霍尔器件是由半导体材料制成的一种薄片,器件的长、宽、高分别为 l 、b 、d 。若在垂直于薄片平面(沿厚度 d )方向施加外磁场B ,在沿l 方向的两个端面加一外电场,则有一定的电流流过。由于电子在磁场中运动,所以将受到一个洛仑磁力,其大小为:qVB f = 式中:f —洛仑磁力, q —载流子电荷, V —载流子运动速度, B —磁感应强度。 这样使电子的运动轨迹发生偏移,在霍尔元器件薄片的两个侧面分别产生电子积聚或电荷过剩,形成霍尔电场,霍尔元器件两个侧面间的电位差H U 称为霍尔电压。 霍尔电压大小为: H U H R =d B I /??(mV) 式中:H R —霍尔常数, d —元件厚度,B —磁感应强度, I —控制电流 设 H K H R =d /, 则H U =H K d B I /??(mV) H K 为霍尔器件的灵敏系数(mV/mA/T),它表示该霍尔元件在单位磁感应强度和 单位控制电流下输出霍尔电动势的大小。应注意,当电磁感应强度B 反向时,霍尔电动势也反向。图2为霍耳元件的原理结构图。
传感器原理及其应用 第一章传感器的一般特性 1)信息技术包括计算机技术、通信技术和传感器技术,是现代信息产业的三大支柱。 2)传感器又称变换器、探测器或检测器,是获取信息的工具 广义:传感器是一种能把特定的信息(物理、化学、生物)按一定规律转换成某种可用信号输出的器件和装置。 狭义:能把外界非电信息转换成电信号输出的器件。 国家标准(GB7665-87):定义:能够感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置。 3)传感器的组成: 敏感元件是直接感受被测量,并输出与被测量成确定关系的某一物理量的元件。 转换元件:将敏感元件输出的非电物理量转换成电路参数或电量。 基本转换电路:上述电路参数接入基本转换电路(简称转换电路),便可转换成电量输出。 4)传感器的静态性能指标 (1)灵敏度 定义: 传感器输出量的变化值与相应的被测量(输入量)的变化值之比, 传感器输出曲线的斜率就是其灵敏度。 ①纯线性传感器灵敏度为常数,与输入量大小无关;②非线性传感器灵敏度与x有关。(2)线性度 定义:传感器的输入-输出校准曲线与理论拟合直线之间的最大偏离与传感器满量程输出之比,称为传感器的“非线性误差”或“线性度”。 线性度又可分为: ①绝对线性度:为传感器的实际平均输出特性曲线与理论直线的最大偏差。 ②端基线性度:传感器实际平均输出特性曲线对端基直线的最大偏差。 端基直线定义:实际平均输出特性首、末两端点的连线。 ③零基线性度:传感器实际平均输出特性曲线对零基直线的最大偏差。 ④独立线性度:以最佳直线作为参考直线的线性度。 ⑤最小二乘线性度:用最小二乘法求得校准数据的理论直线。 (3)迟滞 定义:对某一输入量,传感器在正行程时的输出量不同于其在反行程时的输出量,这一现象称为迟滞。 即:传感器在正(输入量增大)反(输入量减小)行程中输出输入曲线不重合称为迟滞。 (4)重复性 定义:在相同工作条件下,在一段短的时间间隔内,同一输入量值多次测量所得的输
第八章霍尔传感器 课题:霍尔传感器的原理及应用课时安排:2 课次编号:12 教材分析 难点:开关型霍尔集成电路的特性 重点:霍尔传感器的应用 教学目的和要求1、了解霍尔传感器的工作原理; 2、了解霍尔集成电路的分类; 3、掌握线性型和开关型霍尔集成电路的特性; 4、掌握霍尔传感器的应用。 采用教学方法和实施步骤:讲授、课堂互动、分析教具:各种霍尔元 件、霍尔传感器 各教学环节和内容 演示1: 将小型蜂鸣器的负极接到霍尔接近开关的OC门输出 端,正极接V cc端。在没有磁铁靠近时,OC门截止,蜂鸣 器不响。 当磁铁靠近到一定距离(例如3mm)时,OC门导通, 蜂鸣器响。将磁铁逐渐远离霍尔接近开关到一定距离(例 如5mm)时,OC门再次截止,蜂鸣器停响。 演示2: 将一根导线穿过10A霍尔电流传感器的铁芯,通入0.1~1A电流,观察霍尔IC的输出电压的变化,基本与输入电流成正比。 从以上演示,引入第一节霍尔效应、霍尔元件的工作原理。 第一节霍尔元件的工作原理及特性 一、工作原理 金属或半导体薄片置于磁感应强度为B的磁场中,磁场方向垂直于薄片,当有电流I流过薄片时,在垂直于电流和磁场的方向上将产生电动势E H,这种现象称为霍尔效应(Hall Effect),该电动势称为霍尔电动势(Hall EMF),上述半导体薄片称为霍尔元件(Hall Element)。用霍尔元件做成的传感器称为霍尔传感器(Hall Transducer)。
图8-1霍尔元件示意图 a)霍尔效应原理图b)薄膜型霍尔元件结构示意图c)图形符号d)外形霍尔属于四端元件: 其中一对(即a、b端)称为激励电流端,另外一对(即c、d端)称为霍尔电动势输出端,c、d端一般应处于侧面的中点。 由实验可知,流入激励电流端的电流I越大、作用在薄片上的磁场强度B越强,霍尔电动势也就越高。霍尔电动势E H可用下式表示 E H=K H IB(8-1)式中K H——霍尔元件的灵敏度。 若磁感应强度B不垂直于霍尔元件,而是与其法线成某一角度θ时,实际上作用于霍尔元件上的有效磁感应强度是其法线方向(与薄片垂直的方向)的分量,即B cosθ,这时的霍尔电动势为 E H=K H IB cosθ(8-2) 从式(8-2)可知,霍尔电动势与输入电流I、磁感应强度B成正比,且当B的方向改变时,霍尔电动势的方向也随之改变。如果所施加的磁场为交变磁场,则霍尔电动势为同频率的交变电动势。 目前常用的霍尔元件材料是N型硅,霍尔元件的壳体可用塑料、环氧树脂等制造。 二、主要特性参数 (1)输入电阻R i恒流源作为激励源的原因:霍尔元件两激励电流端的直流电阻称为输入电阻。它的数值从几十欧到几百欧,视不同型号的元件而定。温度升高,输入电阻变小,从而使输入电流I ab变大,最终引起霍尔电动势变大。使用恒流源可以稳定霍尔原件的激励电流。 (2)最大激励电流I m激励电流增大,霍尔元件的功耗增大,元件的温度升高,从而引起霍尔电动势的温漂增大,因此每种型号的元件均规定了相应的最大激励电流,它的数值从几毫安至十几毫安。 提问:霍尔原件的最大激励电流I m为宜。 A.0mA B.±0.1 mA C.±10mA D.100mA (4)最大磁感应强度B m磁感应强度超过B m时,霍尔电动势的非线性误差将明显增大,B m的数值一般小于零点几特斯拉。 提问:为保证测量精度,图8-3中的线性霍尔IC的磁感应强度不宜超过为宜。 A.0T B.±0.10T C.±0.15T D.±100Gs
光照强度传感器及其变送电路设计(范文)
重庆工业职业技术学院 毕业设计 课题名称:单片机流水灯设计 专业班级: 09电子301 学生姓名:魏玉玺 指导教师:王雪萍 二零一二年四月
光照强度传感器及其变送电路设计 【摘要】光照强度传感器是现代工业和日常生活中经常出现的一种基于光强变化的 检测器件,它可以检测出其接收到的光强的变化,主要使用各种光电元件来将光信 号转换成电信号,再经信号取样电路、放大电路和模数转换电路处理,获取表示光 照度的数字信号,再交由微处理器或DSP处理。光电检测方法具有精度高,反应快,非接触等优点,而且可测参数多,传感器的结构简单,形式灵活多样,因此,光电式传感器在检测和控制中应用非常广泛。本设计利用传感器设计的基本方法,设计 制作一个可以感知外界光照度变化的传感器,以实现对光照度信号的测量。 【关键词】:光照强度;传感器;变送电路 目录
第一章绪论 (4) 1.1引言 (4) 1.2传感器的概述 (4) 第二章系统设计 (5) 2.1光电传感器及敏感元件 (5) 2.1.1光敏电阻器……………………………………………………………………....... 5 2.1.2光敏二极管.............................................................. . (5) 2.1.3光敏晶体管 (6) 2.2光电传感器概述 (6) 2.3光电传感器工作原理 (6) 2.4光照传感器的设计 (8) 2.4.1设计方案一 (8) 2.4.2设计方案二 (9) 2.5方案比较 (10) 第三章变送电路硬件设计 (10) 3.1变送电路简介................................................................................ (10) 3.2热电阻二线制变送器的设计 (12) 3.2.1信号采集电路 (13) 3.2.2一级放大电路和线性化调整电路 (13) 3.2.3调零、电源平衡及二级放大电路……………………………………… 13 3.2.4调满电路和V/I转换电路…………………………………………………… 14 3.3 热电偶二线制变送器电路设计 (14) 3.3.1信号采集和一级放大电路 (14) 3.3.2 线性化调整电路和二级放大电路 (15)
霍尔传感器测量电路 咨尔元件的基本电路如图1所示。控制电流颠电源f供给,RE,为调节电阻, 调节控制电流的大小。程尔输出端接负载RF,RR可以是一般电阻,也可以是放大器 的 输入电阻或指示器内阻。在磁场与控制电流的作用下,负裁上就有电压输出。在实际 使用时,J或B或两者同时作为信号输入,而输出信号则正比于J或B或两者的乘积。 内于建立霍尔效应所需的时间很短(10 很高(几千兆赫>。 =、温度误差及其补偿 因此,拧制电流为交流时 (一)温度误差 档尔死件测量的关镀是霍尔效府,而霍尔元件是内半导体制成的,固半导体对温度 很敏 感,霍尔元件的载流于迁移率、屯阻率和霍尔系数都陨温度而变化,因而使霍尔元件 的特性参 数(如霍尔电势和输入、输出电阻等)成为温度的函数,导致霍尔传感器产生温度误差。 [二)温度误差的补偿 为了减小霍尔元件的温度误差,需要对基本测量电路进行温度补偿的改进,可以来 用的补 偿方法柯许多种,常用的合以下方艾博希电子法:采用恒流源提供控制电流,选择合 理的负载电阻进行补
偿,利用霍尔元件回路的串联或并联电阻进行补偿,也可以在输入凹路或输出回路中加入热敏 电阻进行温度误差的补偿。 采用温度补偿元件是一种最常见的补偿方法。图2所示为采用热敏电阻进行补偿 的几种补偿方法。图2(n)所示为输入回路补偿电路,锑化钥元件的霍d;输出随温度 升高 而减小的出素,被控制屯流的增加(热敏电阻的阻位随温度升高旧减小)所补偿。图2(b) 所示为输出回路补偿电路成载上得到的霍尔电势随温度J1高而减小的因素,被热敏电阻阻佰 减小所补偿。图2(c)所示为用正温度系数的热敏电阻进行补偿的电路。 在使用时,温度补偿元件最好和霍尔元件封在一起或靠证,使它们温度变化一致。 随着微电子技术的发展,日前霍尔元件多已集成化。集成霍尔九件有许多优点 小、灵敏度高、输出幅度大、NXP代理商温漂小且对电流稳定性要求低等。 集成霍尔元件可分为线性型和开关则两大类。前者是将霍尔冗件和恒流源、线性放大器 等做公‘个芯片卜,输出电压较高,使用非常方便,日前已得到广泛的应蝴,较典型的线性霍尔 元件有UGN35N等。八关型是将霍尔元件、稳压电路、放大器、施密特触发器、(xj门等电路 做在同一个心片上。当外加磁场强度超过规定的工作点时,()川1由高电阻状态变为 导通状
课程设计 2012年6 月25
任务书 课程传感器课程设计 题目电阻式传感器应用电路设计 专业测控技术与仪器11—1 姓名李宠学号110601220127 主要内容: 本设计是基于电阻式传感器的应用电路设计,其主要包括三个环节即:敏感环节(金属应变片全桥电路)、放大环节(放大器)、转换处理环节(A/D转换和单片机处理)。金属应变片感受外界力的作用,将非物理参量转换为电参量,然后经后续电路放大、A/D转换和单片机处理显示。 基本要求: 1、设计一个电阻式传感器的应用电路。 2、对本设计进行测试、评估。 3、说明所用传感器的基本工作原理、画出应用电路电路图、写明电路工作原理、注明元器件选取参数、进行方案比较。 主要参考资料: [1] 阎石.数字电子技术[M].北京:高等教育出版社.2005.12 [2] 刘润华,刘立山.模拟电子技术[J].自动化仪表.2005.6:21-23. [3] 黄贤武,郑筱霞.传感器及其应用[M].北京:高等教育出版社.2004.3:22-28 [4] 张刚毅.单片机原理及应用[M].北京:高等教育出版社.2006.8:295-297 完成期限2012.7.1—2012.7.11 指导教师 专业负责人 2012年7 月7 日
摘要 在一些工程实践中,我们不免对力进行测量,在众多测力传感器中,电阻式传感器以其体积小、灵敏度高、频率响应范围大等众多优点得到了广泛的应用。 本设计选用应变式电阻传感器。应变式电阻组成全桥差动电桥,当电阻受到力的作用时,电阻会发生形变导致阻值发生变化,从而使电桥失去平衡产生一个输出值,输出值经放大器放大后,经A/D转换送入单片机,然后由单片机分析处理显示。经过多次测试,证实该系统能长时间稳定工作,完全满足设计要求指标。 本设计能学以致用,充分了解电阻式触感器的应用原理,理论联系实际,能够加深对传感器的理解。 关键词:应变式电阻;放大器;单片机;A/D转换
霍尔传感器工作原理及其应用 | [<<][>>]一、霍尔齿轮传感器 差动霍尔电路制成的霍尔齿轮传感器,如图1所示,新一代的霍尔齿轮转速传感器,广泛用于新一代的汽车智能发动机,作为点火定时用的速度传感器,用于ABS(汽车防抱死制动系统)作为车速传感器等。 在ABS中,速度传感器是十分重要的部件。ABS的工作原理示意图如图2所示。图中,1是车速齿轮传感器;2是压力调节器;3是控制器。在制动过程中,控制器3不断接收来自车速齿轮传感器1和车轮转速相对应的脉冲信号并进行处理,得到车辆的滑移率和减速信号,按其控制逻辑及时准确地向制动压力调节器2发出指令,调节器及时准确地作出响应,使制动气室执行充气、保持或放气指令,调节制动器的制动压力,以防止车轮抱死,达到抗侧滑、甩尾,提高制动安全及制动过程中的可驾驭性。在这个系统中,霍尔传感器作为车轮转速传感器,是制动过程中的实时速度采集器,是ABS中的关键部件之一。 在汽车的新一代智能发动机中,用霍尔齿轮传感器来检测曲轴位置和活塞在汽缸中的运动速度,以提供更准确的点火时间,其作用是别的速度传感器难以代替的,它具有如下许多新的优点。 (1)相位精度高,可满足0.4°曲轴角的要求,不需采用相位补偿。 (2)可满足0.05度曲轴角的熄火检测要求。 (3)输出为矩形波,幅度与车辆转速无关。在电子控制单元中作进一步的传感器信号调整时,会降低成本。 用齿轮传感器,除可检测转速外,还可测出角度、角速度、流量、流速、旋转方向等等。
图1霍尔速度传感器的内部结构 1.车轮速度传感器 2.压力调节器 3.电子控制器 图2 ABS气制动系统的工作原理示意图 二、旋转传感器 按图3所示的各种方法设置磁体,将它们和霍尔开关电路组合起来可以构成各种旋转传感器。霍尔电路通电后,磁体每经过霍尔电路一次,便输出一个电压脉冲。
霍尔传感器工作原理及其应用 | 一、霍尔齿轮传感器 差动霍尔电路制成的霍尔齿轮传感器,如图1所示,新一代的霍尔齿轮转速传感器,广泛用于新一代的汽车智能发动机,作为点火定时用的速度传感器,用于ABS(汽车防抱死制动系统)作为车速传感器等。 在ABS中,速度传感器是十分重要的部件。ABS的工作原理示意图如图2所示。图中,1是车速齿轮传感器;2是压力调节器;3是控制器。在制动过程中,控制器3不断接收来自车速齿轮传感器1和车轮转速相对应的脉冲信号并进行处理,得到车辆的滑移率和减速信号,按其控制逻辑及时准确地向制动压力调节器2发出指令,调节器及时准确地作出响应,使制动气室执行充气、保持或放气指令,调节制动器的制动压力,以防止车轮抱死,达到抗侧滑、甩尾,提高制动安全及制动过程中的可驾驭性。在这个系统中,霍尔传感器作为车轮转速传感器,是制动过程中的实时速度采集器,是ABS中的关键部件之一。 在汽车的新一代智能发动机中,用霍尔齿轮传感器来检测曲轴位置和活塞在汽缸中的运动速度,以提供更准确的点火时间,其作用是别的速度传感器难以代替的,它具有如下许多新的优点。 (1)相位精度高,可满足0.4°曲轴角的要求,不需采用相位补偿。 (2)可满足0.05度曲轴角的熄火检测要求。 (3)输出为矩形波,幅度与车辆转速无关。在电子控制单元中作进一步的传感器信号调整时,会降低成本。 用齿轮传感器,除可检测转速外,还可测出角度、角速度、流量、流速、旋转方向等等。
图1霍尔速度传感器的内部结构 1.车轮速度传感器 2.压力调节器 3.电子控制器 图2 ABS气制动系统的工作原理示意图 二、旋转传感器 按图3所示的各种方法设置磁体,将它们和霍尔开关电路组合起来可以构成各种旋转传感器。霍尔电路通电后,磁体每经过霍尔电路一次,便输出一个电压脉冲。