Experiments of inverted pseudolite positioning for airship-based GPS augmentation system
- 格式:pdf
- 大小:375.61 KB
- 文档页数:7
Science is a fascinating subject that has many unique characteristics. It is based on empirical evidence and relies on observation, experimentation, and logical reasoning to understand the natural world. Here are some key features of science that make it an essential part of our lives:1. Objectivity: Science strives for objectivity by minimizing personal biases and ensuring that conclusions are based on verifiable evidence.2. Replicability: Scientific experiments should be replicable, meaning that other scientists should be able to reproduce the same results under the same conditions.3. Hypothesis Testing: Scientists formulate hypotheses that can be tested through experiments. If the results support the hypothesis, it may become a theory if not, the hypothesis is revised or discarded.4. The Scientific Method: This is a systematic approach to investigating and understanding phenomena, which includes steps like observation, forming a hypothesis, experimentation, analysis, and drawing conclusions.5. Peer Review: Scientific findings are subject to peer review, a process where other experts in the field evaluate the research for its validity and significance.6. Evolution of Knowledge: Science is selfcorrecting. As new evidence emerges, scientific understanding evolves, and theories are refined or replaced.7. Interdisciplinary: Science often intersects with other fields, such as technology, engineering, and mathematics, leading to advancements in various areas of study.8. Application to RealWorld Problems: Scientific knowledge is applied to solve practical problems, improve technologies, and enhance our quality of life.9. Curiosity and Skepticism: A key aspect of scientific inquiry is the drive to explore the unknown and the skepticism that questions established ideas.10. Ethical Considerations: Scientific research is guided by ethical principles, ensuring that studies are conducted responsibly and do not harm the environment or individuals involved.In conclusion, the characteristics of science are what make it a powerful tool forunderstanding and shaping our world. It encourages a mindset of curiosity, critical thinking, and continuous learning.。
鉴别实验英文作文I. The experiment was set up in a controlled environment to ensure accurate results. Each participant was given specific instructions to follow, and the variables were carefully manipulated to test the desired outcome.II. The participants were asked to complete a series of tasks designed to measure their cognitive abilities and problem-solving skills. These tasks ranged from simple puzzles to complex mathematical problems, and each participant was timed to assess their speed and accuracy.III. The data collected from the experiment was analyzed using statistical methods to determine any significant differences between the control group and the experimental group. This analysis helped to identify any patterns or trends in the results.IV. The researchers observed the behavior of theparticipants during the experiment to gather qualitative data that could provide additional insights into their cognitive processes. This involved noting any signs of frustration, confusion, or confidence as they completed the tasks.V. The results of the experiment were then compared to previous studies in the field to see if they were consistent with existing findings or if they revealed any new information. This comparison helped to validate the reliability of the experiment's results.VI. The implications of the findings were discussed in relation to their potential applications in real-world scenarios, such as education, workplace performance, and clinical assessments. This discussion highlighted the practical significance of the experiment's results.。
最新GRE笔试模考练习参考翻译1/12Page 3 Section 31。
尽管科学家轻视这种思想,关于遗传代码的突发变异,[即自发变异],为奇思异想,但是有可能大自然会像某些音乐大师一样偶尔(即兴演奏improvises),远非所期待或可预料的。
2。
尽管时间,空间,历史和各种人类社会形态具有(偶然性),但以上种种世界却面临着相同的问题,并且的除了高度(类似的)解决方案,差别只是存在于琐碎的细节之中。
3。
尽管他在公开行动中极端的(拘谨沉默)是众所周知的,但学者们发现他的日记却是以非同一般的(坦率态度)而写就的。
4。
由于科学知识(快速的发展),教科书新版本的编辑工作在原作之后不久就开始了。
5。
她在商业事务中非常节俭,但在她的个人生活中却展示出一系列的(挥霍行为)。
6。
如果政府最新的预算问题是(反常的),那么这将是无益的,即利用它们作为(启迪性的)例子,去避免在将来,因目光短浅的财政计划而导致的必然后果。
7。
正如一些作家对于语言表达的能力感到(绝望)一样,Giacometti为艺术表达现实的失败而(痛苦不堪)。
最新GRE笔试模考练习参考翻译2/12Page 25 Section 61。
尽管事实上这将是非常方便的去将动物的生命周期非为诸如幼年期,青壮期和衰老期这样的离散的阶段,但是这些时段并不是真正(完全分开的)。
2。
尽管自从1850年以来被记录的火山爆发的数目呈指数上升,但并不表示火山活动(增加),而是表明了更加广泛和(系统化的)记录手段。
3。
解释在政治压迫的政体下写成的小说的挑战在于,区分哪些是作者的信仰本身(固有的)部分,与之对立的是那些是由政治压力所(强加的)部分。
4。
我总是为自己对别人愚蠢行为的(容忍态度)而吃惊,更难于(理解的)是他们也非常愚蠢的,同样致力于认同我的愚蠢行为。
5。
尽管有强劲的狡辩,这十多岁小孩脸上露齿一笑的表情(揭穿了)她的否认,即她在这个恶作剧实施在她父母亲身上之前已经知道了这个恶作剧。
观察法(observation)是在自然条件下,对研究对象进行有系统、有计划的观察,从中发现心理现象产生和发展的规律。
分为自然观察法和实验观察法。
问卷法(questionares):研究者用统一、严格设计的问卷来收集研究对象有关的心理特征和行为数据资料的方法。
测验法(testing)是通过修订的标准化的问题(量表),按照一定的测量程序收集数据的方法。
访谈法(Interview)又叫个案法(Case Study)或临床法(Clinical Study),是研究者围绕事先设计好的问题,通过与研究对象进行深入细致的观察和调查,收集尽可能详细的资料,以确定心理和行为的前因后果。
文献检索(literature search)与分析是提出有价值的前沿课题的基础性工作,也是研究课题具体化的必经之路。
这一工作可在两个层次上展开:第一个层次在于把握研究生涯的方向;第二个层次在于确定具体的研究课题。
假设(Hypothesis)是对研究问题提出的设想,是根据已有事实及原理所作出的猜测。
可得总体(accessible population):能找到的、可能用为被试的研究对象。
代表性样本(representative sample):在与研究有关的特征方面,样本与总体一致(误差允许范围内)有偏样本(biased sample):如果样本特征与总体特征相差甚远,超出了误差许可的范围,这样的样本叫有偏样本。
目标总体(target population):指研究对象的全体。
简单随机取样(simple random sampling)就是按随机原则直接从总体N个单位中,抽取n 个单位作为样本。
便利取样(convenience sampling):研究者只使用那些容易得到的个体作被试,被选的人必须是那些找得到的、乐于参加研究的。
霍桑效应(Hawthorne effect):在心理实验中,被试对待实验的态度对实验结果所造成的影响。
安慰剂效应(placebo effect):被试因为知道或被告知某种情况会造成某种反应,实际上并不会产生这的反应,但是被试却感觉出现了这种反应或表现出这种反应。
你是怎么处理赝品英文作文Dealing with counterfeit English compositions can be a challenging task, but with the right approach, it can be managed effectively. Here are some strategies you can employ:1. Detection: The first step in handling counterfeit English compositions is to detect them. Look for inconsistencies in writing style, language proficiency, and coherence. Pay attention to unusual phrases, awkward sentence structures, or abrupt shifts in tone. Additionally, you can use plagiarism detection software to compare the composition with existing texts.2. Comparison: Once you suspect a composition may be counterfeit, compare it with the original prompt (without revealing it in your essay). Analyze whether the content addresses the main points of the prompt and whether it demonstrates a thorough understanding of the topic. Lookfor discrepancies between the prompt and the composition,such as irrelevant information or misinterpretation of key concepts.3. Language Analysis: Examine the language used in the composition. Authentic English compositions typically exhibit a consistent level of language proficiency throughout the text. Look for signs of unnatural language usage, such as excessive reliance on a thesaurus or inconsistent use of idiomatic expressions. Pay attention to grammar, syntax, and vocabulary usage to identify any anomalies that may indicate counterfeit content.4. Research: Conduct additional research on the topic of the composition. Verify the accuracy of factual information presented in the text and check whether the arguments presented are supported by credible sources. If you encounter information that seems dubious or unsubstantiated, it could be a sign of counterfeit content.5. Consultation: If you're uncertain about the authenticity of a composition, seek advice from a trusted mentor, teacher, or language expert. They can providevaluable insights and help you evaluate the composition objectively. Discuss your concerns with them and ask for guidance on how to proceed.6. Documentation: Keep thorough documentation of your findings, including any discrepancies or suspiciouselements you've identified in the composition. This documentation will be useful if you need to presentevidence to support your assessment of the composition's authenticity.7. Communication: If you determine that a compositionis indeed counterfeit, communicate your findings tactfully and professionally. Provide constructive feedback to the author, highlighting specific areas where improvement is needed. Offer guidance on how they can enhance theirwriting skills and avoid plagiarism in the future.8. Prevention: Educate students about the consequencesof plagiarism and the importance of producing original work. Encourage them to develop their critical thinking andwriting skills through practice, feedback, and revision.Emphasize the value of integrity and academic honesty in academic pursuits.By employing these strategies, you can effectively detect and handle counterfeit English compositions while promoting a culture of academic integrity and excellence.。
示波夏比冲击实验的英文The impact test, commonly known as the Charpy test, is a crucial method for assessing the toughness of materials.In this experiment, a notched specimen is subjected to a swinging pendulum, which delivers a single, sharp blow to the material.The energy absorbed during the fracture is measured, providing a quantitative measure of the material's resistance to impact.This test is particularly important for materials that are used in environments where they may be exposed to sudden impacts or shocks.The results of the Charpy test help engineers to select materials that can withstand the forces they will encounter in service, ensuring the safety and reliability of structures and components.The test is conducted at various temperatures to evaluate the material's toughness at different conditions, which is vital for applications in extreme climates.Understanding the impact behavior of materials is essential for the design of safe and durable products, from automotive parts to construction materials.By using the Charpy test, manufacturers can ensure that materials meet the required standards for impact resistance, contributing to the overall performance and safety of the final product.。
写一种叫实验的作文英文回答:Experiment: The Catalyst for Scientific Discovery.An experiment is a scientific investigation that seeks to establish the cause-and-effect relationship between variables. It involves the manipulation of one or more variables, while controlling for others, and observing the resulting effect. Experiments play a crucial role in advancing scientific knowledge, as they provide empirical evidence to support or refute hypotheses.The essential components of an experiment include:Hypothesis: A testable statement that predicts the outcome of an experiment.Variables: Factors being investigated in the experiment. The independent variable is manipulated by theexperimenter, while the dependent variable is the outcome that is measured.Control: An experimental condition in which the independent variable is not manipulated. This allows for the isolation and identification of the effects of the independent variable on the dependent variable.Data: Results obtained from the experiment, typically in the form of observations, measurements, or statistics.Analysis: Interpretation of the data to determine whether the hypothesis is supported or refuted.Experiments are classified into various types, including controlled experiments, observational studies, and randomized controlled trials. The choice of experimental design depends on the specific research question and the available resources.The scientific method, which involves formulating a hypothesis, designing an experiment, collecting data,analyzing the results, and drawing conclusions, is based on experimentation. Experiments are not only essential for hypothesis testing but also for identifying patterns, establishing causal relationships, and formulating theories.中文回答:实验,科学发现的催化剂。
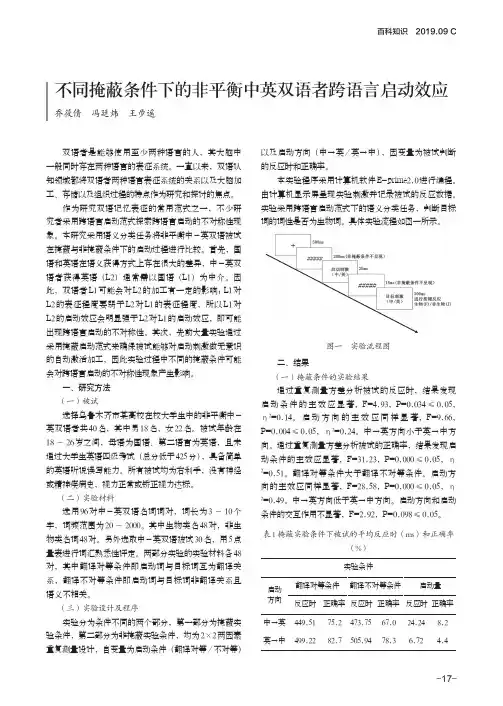
百科知识 2019.09 C不同掩蔽条件下的非平衡中英双语者跨语言启动效应乔筱倩 冯廷炜 王步遥双语者是能够使用至少两种语言的人,其大脑中一般同时存在两种语言的表征系统。
一直以来,双语认知领域都将双语者两种语言表征系统的关系以及大脑加工、存储以及组织过程的特点作为研究和探讨的焦点。
作为研究双语记忆表征的常用范式之一,不少研究者采用跨语言启动范式探索跨语言启动的不对称性现象。
本研究采用语义分类任务将非平衡中-英双语被试在掩蔽与非掩蔽条件下的启动过程进行比较。
首先,国语和英语在语义获得方式上存在很大的差异,中-英双语者获得英语(L2)通常需以国语(L1)为中介。
因此,双语者L1可能会对L2的加工有一定的影响;L1对L2的表征程度要弱于L2对L1的表征程度,所以L1对L2的启动效应会明显强于L2对L1的启动效应,即可能出现跨语言启动的不对称性。
其次,先前大量实验通过采用掩蔽启动范式来确保被试能够对启动刺激做无意识的自动激活加工,因此实验过程中不同的掩蔽条件可能会对跨语言启动的不对称性现象产生影响。
一、研究方法(一)被试选择乌鲁木齐市某高校在校大学生中的非平衡中-英双语者共40名,其中男18名,女22名。
被试年龄在18~26岁之间,母语为国语、第二语言为英语,且未通过大学生英语四级考试(总分低于425分),具备简单的英语听说读写能力。
所有被试均为右利手,没有神经或精神疾病史,视力正常或矫正视力达标。
(二)实验材料选用96对中-英双语名词词对,词长为3~10个字,词频范围为20~2000。
其中生物类名48对,非生物类名词48对。
另外选取中-英双语被试30名,用5点量表进行词汇熟悉性评定。
两部分实验的实验材料各48对,其中翻译对等条件即启动词与目标词互为翻译关系,翻译不对等条件即启动词与目标词非翻译关系且语义不相关。
(三)实验设计及程序实验分为条件不同的两个部分,第一部分为掩蔽实验条件,第二部分为非掩蔽实验条件,均为2×2两因素重复测量设计,自变量为启动条件(翻译对等/不对等)以及启动方向(中→英/英→中),因变量为被试判断的反应时和正确率。
1. 闪光融合临界频率2. 自然错觉3. 内隐记忆4. 暗适应5. 因变量6. 统计控制法7. 速度-准准确性权衡8. 被试内设计9. 实验者效应10. ROC曲线11. 减数法12. 双盲实验13. 等响曲线14. 多重记忆系统说15. 听觉掩蔽16. 良好图形法则17. 部分报告法18. 交互作用19. 开窗实验20. 恒定刺激法21. 人差方程22. 信号检测论的两个独立指标23. 实体镜24. 等高线25. 迁移适当加工理论26. 艾宾浩斯27. ABA设计28. 实验效度29. 错误记忆30. 特征整合理论31. 启动效应32. 直接验证33. 顺序量表34. 随机化法35. 系列位置效应36. 注意的双任务范式37. 情绪诱导法38. 观察法39. 相关法40. 实验法41. 自变量42. 镜画仪43. 控制变量44. 多变量设计45. 被试间设计46. 小样本设计47. 准实验设计48. 信度49. 正电子放射层扫描术(简称PET)50. 脑电技术(简称EEG)51. 脑磁图(简称MEG)52. 功能性核磁共振成像技术(简称fMRI)53. 简单反应时54. 选择反应时55. 绝对阈限56. 相对阈限57. 最小变化法58. 平均差误法59. 对偶比较法60. 等级排列法61. 注意的操作定义62. 视适应63. 视敏度64. 双眼线索65. 时间知觉66. 序列回忆67. 对偶联合回忆68. 自由回忆69. 感觉记忆70. 短时记忆71. 长时记忆72. 内隐学习73. 前瞻记忆74. 回溯记忆75. 元记忆76. 客体记忆77. 出声思维78. 个体差异79. 一般能力80. 划消测验81. 动作技能82. 特殊能力83. 人格84. 大五人格85. A型人格模式86. B型人格模式87. 社会认知88. 从众89. 内隐社会认知90. 晕轮效应91. 纯粹接触效应92. 内隐自尊93. 相似性吸引94. 认知性的说服反应95. 决策后效应96. 次级内隐自尊效应97. 个人空间圈98. 工程心理学99. 心理负荷100.听力计101.深度知觉仪102.空间知觉测试仪103.时间知觉测试仪104.速度知觉仪105.简单反应计时器106.眼动仪107.记忆鼓108.速示器109.棒框仪110.环境心理学答案:1. 闪光融合临界频率:当每分钟闪光的次数增加到一定程度时,人眼就不再感到是闪光而感到是一个完全稳定的或连续的光,闪光临界融合频率就是指闪烁刚刚达到融合时的光刺激间歇的频率。
实验作文咋写三百字英文回答:Introduction:The scientific method is a systematic approach to investigating and understanding the world around us. It involves making observations, forming hypotheses, testing those hypotheses through experiments, and analyzing the results to draw conclusions. Experiments play a crucial role in the scientific method, as they allow scientists to test their hypotheses and determine whether they are supported by evidence.Purpose of an Experiment:The primary purpose of an experiment is to test a hypothesis. A hypothesis is a proposed explanation for a phenomenon or observation. By conducting an experiment, scientists can collect data to determine whether theirhypothesis is correct or incorrect.Experiment Design:The design of an experiment is critical to its success. Scientists must carefully consider the following factors when designing an experiment:Independent variable: The variable that isintentionally changed by the experimenter to test itseffect on the dependent variable.Dependent variable: The variable that is measured to determine the effect of the independent variable.Controlled variables: Variables that are kept constant throughout the experiment to ensure that they do not influence the results.Experimental group: The group that receives the treatment (i.e., the independent variable).Control group: The group that does not receive the treatment and serves as a baseline for comparison.Conducting an Experiment:Once an experiment has been designed, it can be conducted. The following steps are typically involved:Conducting the experiment: Following the experimental design, the experimenter manipulates the independentvariable and measures the dependent variable in both the experimental and control groups.Collecting data: The experimenter records the data collected during the experiment. This data can bequalitative (e.g., observations) or quantitative (e.g., measurements).Analyzing the data: The experimenter analyzes the data to determine whether there is a significant difference between the experimental and control groups. This mayinvolve statistical analysis or other data analysis methods.Drawing conclusions: Based on the analysis of the data, the experimenter draws conclusions about the hypothesis.Reporting an Experiment:The results of an experiment are typically reported ina scientific paper or presentation. The report shouldinclude the following:Introduction: Provides background information and the purpose of the experiment.Methods: Describes the experimental design and how the experiment was conducted.Results: Presents the data collected during the experiment.Discussion: Discusses the results of the experimentand their implications for the hypothesis.Conclusion: Summarizes the main findings of the experiment and draws conclusions about the hypothesis.中文回答:实验作文怎么写三百字?实验作文是科学研究中必不可少的环节,也是学生们经常会遇到的作文类型。
实验心理学经典范式整理潜变量分析(latent variable analysis)近年来提出一种新的研究方法,即潜变量分析。
传统研究方法认为一个执行测验的成绩就能够代表一种执行功能,而潜变量分析采用多个执行测验对同一执行功能进行测量,并从中提取它们的共性,形成该执行功能的潜变量。
对测量同一执行功能的多个任务应涉及不同的实验刺激和实验程序,以避免在潜变量提取后的执行结构中仍含有非执行的成分。
潜变量提取的方法在很大程度上缓解了诸如纯度,结构有效性等问题,有助于进一步探讨各执行功能间,以及执行功能与其他一些认知结构间的关系。
Miyake等报告的一项研究表明,虽然三项执行功能(对优势反应的抑制,注意转换和记忆刷新)间存在一定的相关,但也清晰地表现出相互可分离性;并且,这三种执行功能在一系列复杂执行任务(包括神经心理学测验)中的贡献是不一样的。
然而,由于潜变量提取需要进行多项测验,结构方程建模还需要较大的样本量,使得这种研究方法在实施的过程中存在较大的困难。
n-back范式n-back范式要求被试者将刚刚出现过的刺激与前面第n个刺激相比较,通过控制当前刺激与目标刺激间隔的刺激个数来操纵负荷。
当n=1时,要求被试者比较当前刺激和与它相邻的前一个刺激;当n=2时,则比较当前刺激和与它前面隔一个位置上的刺激;当n=3时,要求比较的是当前刺激和它前面隔两个位置上的刺激,依此类推获得不同程度的任务难度。
任务类型包括字母匹配任务,位置匹配任务和图形匹配任务三类。
在位置匹配任务中,要求被试者判断两个刺激呈现的位置是否相同,而不管两者是否为同一个字母或图形;在字母或图形匹配任务中,则要求被试者判断两个刺激是否为同一字母或图形,而不管他们的呈现位置如何。
该范式的优点在于将任务设计成在工作记忆上施加一连续的,参数可变的负荷,而其他任务需要保持恒定。
P.O.Harvey等(2004)用n-back范式评估年轻抑郁症住院病人的刷新加工,抑郁病人在n-back任务中显示了较差的操作。
一、实验背景恒定刺激法是一种传统的心理物理法,由费希纳提出。
该方法通过给被试呈现一系列恒定的刺激,让被试判断刺激是否发生变化,以此来测定被试的感知阈限。
本实验旨在通过恒定刺激法测定被试的重量差别阈限。
二、实验目的1. 了解恒定刺激法的基本原理和方法。
2. 掌握重量差别阈限的测定方法。
3. 分析被试的感知阈限与刺激强度、频率等因素的关系。
三、实验材料1. EP512重量鉴别仪2. 标准刺激和变异刺激3. 被试者:3名四、实验方法1. 实验设计:本实验采用恒定刺激法,使用EP512重量鉴别仪进行实验。
实验过程中,被试者需判断标准刺激和变异刺激之间的重量差别。
2. 实验步骤:(1)被试者随机选择标准刺激和变异刺激。
(2)被试者将变异刺激与标准刺激进行比较,判断两者之间是否存在重量差别。
(3)记录被试者判断结果,包括正确判断次数和错误判断次数。
(4)重复实验,直至被试者达到稳定状态。
3. 数据处理:根据被试者的判断结果,计算重量差别阈限。
五、实验结果1. 被试者1的重量差别阈限为0.5g,正确判断次数为20次,错误判断次数为10次。
2. 被试者2的重量差别阈限为0.4g,正确判断次数为18次,错误判断次数为12次。
3. 被试者3的重量差别阈限为0.6g,正确判断次数为22次,错误判断次数为8次。
六、实验分析1. 从实验结果来看,被试者的重量差别阈限存在一定差异,可能与被试者的个体差异有关。
2. 在实验过程中,被试者对标准刺激和变异刺激的判断结果较为稳定,说明恒定刺激法能够有效测定被试的重量差别阈限。
3. 本实验结果表明,被试者的感知阈限与刺激强度、频率等因素有关。
在一定范围内,随着刺激强度的增加,被试者的感知阈限逐渐降低。
七、实验结论1. 恒定刺激法是一种有效的心理物理法,可用于测定被试的重量差别阈限。
2. 被试者的感知阈限与刺激强度、频率等因素有关,在一定范围内,随着刺激强度的增加,被试者的感知阈限逐渐降低。
考研⼼理学统考⼼理学专业基础综合(实验⼼理学)模拟试卷51考研⼼理学统考⼼理学专业基础综合(实验⼼理学)模拟试卷51(总分:54.00,做题时间:90分钟)单项选择题(总题数:15,分数:30.00)⼀、单项选择题1.提取诱发遗忘实验被⼴泛应⽤于研究(分数:2.00)A.启动效应现象B.记忆过程的抑制现象√C.内隐记忆现象D.遗忘症病⼈的实验性分离现象解析:解析:提取诱发遗忘实验是指回忆部分记忆材料时往往会使得相关记忆材料的回忆量降低。
被⼴泛⽤于记忆过程中的抑制现象的研究。
本题选择B。
2.⾯部活动编码系统(FACS)的提出者是(分数:2.00)A.艾克曼√B.伊扎德C.艾宾浩斯D.达尔⽂解析:解析:有关⾯部表情和⾯部活动做编码系统的研究最负盛名的是⼼理学家艾克曼的“⾯部活动编码系统”(FACS)、⼼理学家伊扎德的“最⼤限度辨别⾯部肌⾁运动编码系统”(MAX)和“表情辨别整体判断系统”(AFFEX)。
本题选择A。
3.⼈类的迷宫学习是⼈类动作学习的⼀部分,该类研究中⼀般需要被试利⽤(分数:2.00)A.视觉和动觉信息B.视觉和触觉信息C.听觉和触觉信息D.动觉和触觉信息√解析:解析:⼈类的迷宫学习主要⽤于研究只利⽤动觉与触觉获得信息的情况下,如何学会空间定向。
故本题选择D。
4.在阅读理解的眼动实验中,“阅读者按阅读的进程,⾃然地把注视点由读完的⼀⾏的末端,移到下⼀⾏的始端的眼运动过程。
”这⼀眼动模式是指(分数:2.00)A.注视B.跳动C.回视D.回归√解析:解析:回扫是指阅读者按阅读的进程,⾃然地把注视点由读完的⼀⾏的末端,移到下⼀⾏的始端的眼运动过程,也被称为换⾏运动。
所以,本题选择D。
5.(分数:2.00)A.等响曲线√B.响度量表C.⾳⾼量表D.等⾼线解析:解析:等响曲线是把响度⽔平相同的各种频率的纯⾳的声压级连成的曲线,⽤来表⽰声强和响度之间关系。
它以⼀定声级的1000Hz的纯⾳为标准⾳,⽤其他频率的纯⾳为⽐较⾳,由听者调节⽐较纯⾳的声级,直到它和标准纯⾳的响度相等。
全国2018年10月高等教育自学考试教育科学研究方法(二)试题课程代码:00456一、单项选择题(本大题共15小题,每小题2分,共30分)在每小题列出的四个备选项中只有一个是符合题目要求的,请将其代码填写在题后的括号内。
错选、多选或未选均无分。
1.在科学史上,首次研究了科学认识的“归纳——演绎”程序及所遵循的方法,在形式逻辑之上建立了科学方法论的哲学家是( )A.苏格拉底B.柏拉图C.亚里士多德D.毕达哥拉斯2.不同类型的教育科学研究成果有不同的价值表现,基础理论研究成果的价值一般更多地表现为( )A.社会价值B.应用价值C.经济价值D.学术价值3.教育法问题、社会力量办学问题等研究属于( )A.基础研究B.应用研究C.发展性研究D.预测研究4.“文献”一词,最早见于( )A.《论语》B.《孟子》C.《大学》D.《中庸》5.对教育实验结果的解释取决于( )A.外在效度B.内在效度C.总体效度D.生态效度6.归纳分析的主要方法中,由余果推余因,其结论具有或然性的方法是( )A.求同法B.求异法C.求同求异并用法D.剩余法7.教育实验假设的表述要用( )A.陈述句B.疑问句C.一般疑问句D.特殊疑问句8.编制出世界上第一个成绩测验量表的是( )A.费舍B.赖斯C.肯德尔D.恩格斯19.进行数据的相关分析时,最准确、最方便的是用( )A.点二列相关系数B.等级相关系数C.斯皮尔曼等级相关系数D.积差相关系数10.文献检索中,按时间范围、以课题研究的发生时间为检索始点,按事件发生、发展时序,由远及近,由旧到新的顺序查找方法是( )A.顺查法B.逆查法C.引文查找法D.综合查找法11.根据定序测量这一方法以及相应测量工具所得的数据资料是( )A.比率数据资料B.等级资料C.等距数据资料D.计数资料12.检验效度的方法中,对同一问题从多个不同角度不同看法得来的结果进行比较分析以获得最大一致性的方法是( )A.检查法B.反馈法C.三角互证法D.比较法13.对某一调查对象在一个较长的时间内的特征变化进行调查,目的是了解研究对象前后的变化和差异情况。
Experiments of Inverted Pseudolite Positioning for Airship-Based GPS Augmentation SystemToshiaki Tsujii, Masatoshi HarigaeFlight Systems Research Center, National Aerospace Laboratory, Japan (NAL)Joel Barnes, Jinling Wang and Chris RizosSchool of Surveying & Spatial Information Systems, The University of New South Wales, Australia (UNSW)BIOGRAPHIESToshiaki Tsujii is a senior researcher at the Flight Systems Research Center, NAL, Japan, where he has been investigating aspects of satellite navigation and positioning for ten years. He holds a Ph.D. in applied mathematics and physics from Kyoto University.Masatoshi Harigae is the leader of the Navigation Systems Group, Flight Systems Research Center, NAL, and has over 15 years experience in the development of GPS/INS navigation systems for automatic landing applications. He is now engaged in the High Speed Demonstration project that is carried out in cooperation with NASDA. He has a B.S., a M.S. and a Ph.D. from the University of Tokyo in aerospace engineering.Joel Barnes holds a Ph.D. in satellite geodesy from the University of Newcastle-upon-Tyne, UK. Since December 2000 he has been a postdoctoral research fellow within the Satellite and Navigation and Positioning (SNAP) group, in the School of Surveying and Spatial Information Systems, the University of New South Wales (UNSW). His current research interests are high precision kinematic GPS positioning, pseudolites and GPS receiver firmware customization.Jinling Wang is a Lecturer in the School of Surveying & SIS, UNSW. He is Chairman of the Working Group “Pseudolite applications in Engineering Geodesy”, of the International Association of Geodesy’s (IAG) Special Commission 4.Chris Rizos is a Professor at the School of Surveying & Spatial Information Systems, UNSW, and leader of the SNAP group, which specializes in addressing precise static and kinematic applications of GPS. He is secretary of Section 1 'Positioning', of the IA G.ABSTRACTRecently some countries have begun conducting feasibility studies and R&D projects on High Altitude Platforms Systems (HAPS). Japan has been investigating the use of an airship system that will function as a stratospheric platform (altitude of about 20km) for applications such as environmental monitoring, communications and broadcasting. In addition, if pseudolites (PL) were mounted on the airships, their GPS-like signals would be stable augmentations that would improve the accuracy, availability, and integrity of GPS-based positioning systems because the airship network would cover all of Japan. The accuracy of the pseudolite positions would be a limiting factor for such a service since the PL 'ephemeris error' is more serious than GPS due to the lower height of the airship. The carrier phase-based inverted PL method is one of the positioning schemes that could provide the precise 'ephemeris' of the airship. Therefore, a preliminary ground test of the pseudolite-based inverted GPS positioning has been conducted in both static and kinematic mode, and a high positioning accuracy in both modes has been demonstrated.INTRODUCTIONThe transmitters of GPS-like signals, which are called pseudolites (PL), or "pseudo-satellites", have been widely investigated as additional ranging sources to enhance the performance of GPS (see, e.g., Cobb, 1997). Ground-based GPS augmentation systems using pseudolites have been investigated for several applications such as vehicle navigation in downtown urban canyons (Altmayer, 1998), positioning in deep open-cut pits and mines (Stone & Powell, 1999), attitude determination (Wang et al., 2000), precision landing of aircraft (Barltrop et al., 1996; Pervan& Parkinson, 1997), and integrated positioning system with GPS/INS (Wang et al, 2001). The application of airborne pseudolites was suggested by Raquet et al. (1995). However, their purpose was the positioning of mobile pseudolites installed on military aircraft (Pachter &MaKay, 1998), not the augmentation of a navigation/positioning system. Recently, some countries have begun conducting feasibility studies and R&D projects on High Altitude Platforms Systems (HAPS). Although some authors have suggested the use of HAPS as navigation aids, their main function would be providing (pseudo-range) DGPS correction data (Dovis et al., 2000), not transmitting extraranging signals.Figure 1. Conceptual image of the stratospheric airship system (Taken from http://www.nal.go.jp).Japan has been investigating an airship system, as shown in Figure 1, that will function as a stratospheric platform (SPF) at an altitude of about 20km for applications such as environmental monitoring, communications and broadcasting (Yokomaku, 2000). Because of the airship’s station-keeping characteristics, the SPF can be considered as a signal source for a navigation/positioning service (Figure 2). If pseudolites were mounted on the airships, their GPS-like signals would be stable augmentations that would improve the accuracy, availability, and integrity of GPS-based positioning systems across all of Japan.The concept of an innovative GPS navigation/positioning system augmented by SPF-based pseudolites, which is referred to as GPS/PL system hereafter, was introduced by Tsujii et al. (2001). Also, some tests of PL positioning based on the 'inverted-GPS' concept were conducted in April 2001, because the precision of the PL position ('PL ephemeris') would be a limiting factor for such a service. The static test of the inverted GPS positioning, where a GPS satellite was used as a reference transmitter, showed excellent positioning accuracy. In a following test in December 2001, the the pseudolite-based inverted GPS configuration (Dai et al., 2001; Barnes et al., 2002), where another ground pseudolite was used as a reference transmitter, was tested and a similar positioning accuracy was obtained in the static mode (Tsujii et al., 2002). However, in both tests, the carrier phase ambiguities were not able to be resolved in the kinematic mode due to severe multipath error. In this paper, the results of inverted GPSusing multipath resistant antennas are presented.Figure 2. Navigation/positioning service using pseudolites on stratospheric platforms.INVERTED GPS POSITIONINGThe advantages of the GPS/PL system were discussed and the results of a feasibility study was presented in an earlier paper (Tsujii et al., 2001). Since the precise positioning of the PL antenna to provide the ‘PL ephemeris’ is one of the most important challenges, some schemes for estimating the PL position were described. Although the transceiver-based method seems to be the best, the inverted-GPS experiment was conducted as a preliminary test to identify potential problems of the proposed GPS/PL system, because an off-the-shelf transceiver is currently notavailable.Figure 3. Inverted GPS method.The system configuration of the inverted-GPS is shown in Figure 3. The position of a PL antenna underneath a SPF can be estimated directly by the inverted-GPS method (Raquet et al., 1995), where the ranging information is obtained by a receiver on the ground. In order to perform the double-differenced processing for the inverted-GPS approach an additional transmitter, such as a GPS satellite or ground-based PL, is required. The use of a GPS satellite would affect the positioning accuracy because ionospheric delay exists only in the GPS signal (not in the PL signal). If a ground-based PL is used as a reference transmitter, this system is referred to as ‘pseudolite-based inverted GPS’because the satellite ranging data are not required to obtain the position of the rover PL. In this system, the reference transmitter should be located on a high mountain or a tower to ensure line-of-sight from all ground receivers.The measurement equation for the carrier double-differenced observable for the 1st/i-th receivers and the airborne/base transmitters of the GPS/PL system can be written as follows:∇∆ab1i Φ=X 1−X a (t a1)−X i−X a (t ai )−X 1−X b (t b1)+X i−X b (t bi )+∇∆N ab 1i+∇∆d ion +∇∆d trop +∇∆d multi +∇∆ε, (i=1,2, …,n)(1)where b a i X X X ,,denote the position vectors of the i-th receiver on the ground, which are static, the airborne transmitter, and the base transmitter respectively. The i b i a t t ,represent the signal transmitting time to the i-th receiver from the airborne/base transmitters, referred to each of the transmitter clocks. With GPS positioning, the signal reception time for all the observed satellites is the same.However, in the case of inverted-GPS, the signal transmitting time to the receivers, which is analogous with the reception time in conventional GPS, may differ depending on the clock biases of the receivers and the distances between the transmitter and the receivers. These time differences may degrade the PL positioning accuracy because the motion of a PL on a SPF is difficult to predict (in contrast to GPS satellites). The GPS receivers normally synchronize to GPS time to within 1msec. Assuming that the motion of a SPF is less than 1m/sec, the position change of a PL is less than 1mm (=1m /sec ×1m sec). Since the distance difference between the PL and the receivers is less than 150km, in the example of the proposed Japanese configuration of SPFs (Tsujii et al., 2001), the PL position change is less than 0.5mm (=1m /sec ×150km /speed of light ).This effect would have to be investigated further if the station-keeping performance of SPFs were found to be worse. The ionospheric delay term can be neglected if the reference PL is used instead of a GPS satellite, or if GPS transceivers were used.For the test configuration, described below, both the ionospheric and tropospheric delay term s were neglectedbecause of the close proximity of the receivers. Also, the effect of non-simultaneous transmitting time can be neglected due to the close proximity of the PL and receivers, and the slow motion of the rover PL. The measurement equation can be simplified as:∇∆ab 1iΦ=X 1−X a (t)−X i −X a (t)−X 1−X b (t b1)+X i −X b (t b i )+∇∆N ab1i+∇∆d multi +∇∆ε , (i=1,2,…,n)(2)where t is the signal transmitting time from the PL,referred to the PL clock. The position of the receivers, X i ,and the base transmitter, X b , are precisely determined before the test if a PL is used as the base transmitter. If a GPS satellite is used as the base, the ephemeris error can be neglected because the receivers and the rover PL are close to each other relative to their distance from the satellite (Raquet et al., 1995).All data processing were performed using a modified version of the KINGS software developed at NAL (Tsujii et al., 1998).GROUND TEST CONFIGURATIONA miniature configuration of the GPS/PL system was constructed as shown in Figures 4 and 5, and the inverted-GPS experiment in static/kinematic modes was conducted on 30 August 2002. Six single-frequency GPS/PL receivers (Furuno PL-10) were placed on the ground in the Chofu Airfield Branch, NAL. The test ground is expected to be a multipath-rich area since it is surrounded by buildings onall sides and there are some tall trees.Figure 4. Miniature configuration of the GPS/PL system at NAL.The Furuno PL-10 receiver has sixteen channels , of which five channels are programmed to track the PL signal (PRN33-37). An antenna connected to an IntegriNautics IN400 PL was set on a wooden mount which can be rotated by a motor as shown in Figure 4. The radius of the rotation can be set to be 19cm, 24cm, and 35cm. The PRN number 36 was assigned to this rover PL, and therefore this PL is referred to as PL36 hereafter. The motion of the PL36 is controlled by a controller on the ground as shown in Figure 6. The data from six GPS/PL receivers were recorded at 5Hz rate by two laptop computers which were connected to a LAN. In order to enable the kinematic positioning, the multipath resistant antennas were used. The antennas No. 1,2, and 3 were Ashtech choke-ring antennas, while the No.4, 5, and 6 were the Ashtech Geodetic IV antennas. In addition, the grand plane was attached to the rover PL antenna to suppress the signal from the back of the PL antenna.Figure 5. Coordinates of PL (PRN35&36) and GPS receivers.Figure 6. GPS/PL receiver system and PL motion controller.Another IntegriNautics IN400 PL was used as a referencetransmitter in order to conduct the ‘pseudolite-based’inverted GPS positioning. The PRN number 35 was assigned to this reference PL, and this PL is referred to here as PL35.EXPERIMENTS AND RESULTSIn these tests two kinds of positioning modes were used.The first one is the ‘mixed mode’ where a GPS satellite was used as the reference transmitter. The second mode is the ‘PL-based mode’ where a PL was used as the reference and no ranging information from a GPS satellite was used.Although the measurement data suffered from severe multipath error, this error should be constant in the static test and therefore can be removed by pre-processing. The static tests in both modes showed excellent positioning stability, with standard deviations less than 1cm. However,in the kinematic mode, the multipath error varied drastically due to the motion of the rover PL, and the ambiguity could not be resolved. Therefore, the main purpose of this experiment is to mitigate the multipath error, and to simultaneously estimate the ambiguities and position parameters.Table 1. Summary of the experimental casesCase Diameter (cm)124Low speed CW&CCW Medium CW&CCWHighCW&CCWLow speed CW&CCW Stop&Go at 10degree intervals,CW Stop&Go at 45degree intervals,CCW&CW 224Low speed CCW&CW Medium CCW&CW HighCCW&CW 335Low speed CCW&CW Medium CCW&CW HighCCW&CW 419Low speed CCW&CWMedium CCW&CW HighCCW&CWTable 1 summarizes the characteristics of this experiment.Three levels of rotation speed were tested in order to study the tracking performance of the Furuno PL-10 receiver, as this kind of receiver had difficulty tracking the moving PL in the previous test (Tsujii et al., 2001). These speeds are approximately 3.1 (low), 3.6 (miedium), and 4.9degrees/second (high), respectively. As an example, the trajectory of the rover PL in Case 2 is shown in the top of Figure 7. The rotation angle is measured counterclockwise from the east. The middle figure shows the velocity in degrees/second, while the bottom figure shows the total number of receivers which track the rover PL. Some data loss is seen in the figure due to the error of data transfer (not the loss of tracking). There seems to have been no cycle slips in the data. As indicated, the PL-10 barely lost tracking of the moving PL , and the tracking performance would therefore be sufficient for such an application.Figure 7. Motion of the PL (top & middle), and the number of PL-10 receivers which track the PL (bottom).Prior to the kinematic positioning of the rover PL, the magnitude of the multipath error was estimated. Figure 8 shows the residuals of the double-differenced L1 carrier phase in Case2 where the transmitters are GPS satellites (PRN18&5). The positions of the six antennas of the PL-10 receivers were surveyed by GPS beforehand. As seen in Table 2, which summarizes the mean values and the standard deviations, the multipath error was mitigated by using the multipath resistant antennas.Figure 8. DD residuals of L1 carrier phase (cycles) in Case 2 where the transmitters are GPS satellites (PRN18&5).On the other hand, there can be seen some biases in the combination of GPS satellite (PRN18) and static PL (PRN35). The approximate physical center of the PL35 antenna was estimated by the GPS survey and a ruler measurement, since the antenna face was directed to the receive antennas. These biases may be attributed to the unknown phase center of the reference PL35 antenna, and the mean values shown in Table 2 were used for calibration purposes in the kinematic positioning.Figure 9. DD residuals of L1 carrier phase (cycles) in Case 2 where the transmitters are GPS satellite (PRN18) and static PL (PRN35).Then the kinematic positioning of the PL36, as well as the ambiguity resolution, was carried out using the PL35 as the reference transmitter. The biases related to the PL35 were subtracted from the DD carrier phase beforehand. The DD residuals after the kinematic processing are shown in Figure 10, and the statistical values are summarized in Table 2. Since the residuals were nearly zero during the whole session, the estimated ambiguities can be considered to be the correct ones. Some structure in the residuals can be seen, and they seem to be related to the motion of PL36 (see Figure 7). These fluctuations may be the remnant multipath error related to the PL36.Figure 10. DD residuals of L1 carrier phase (cycles) in Case 2 where the transmitters are static PL (PRN35) and rover PL (PRN36).Table 2. Mean and standard deviation of DD residuals ofL1 carrier pahse. (Unit: cycles)*Biases related to the PL35 were subtracted from DD transmitter Receiver pair 121-21-31-41-51-6mean 0.003-0.007-0.010-0.003-0.007GPS 18GPS 5std 0.0280.0320.0400.0320.031mean 0.1990.1470.1030.1070.112GPS 18PL 35std 0.0380.0360.0400.0450.036mean 0.012-0.0130.0080.001-0.003*PL 35PL 36std 0.0270.0230.0250.0200.025The estimated trajectory of the PL36 in Case 2 is shown inFigure 11. This trajectory is the superposition of the 11revolutions of the PL36. Since each trajectory seems to trace the same pass, the kinematic positioning/AR can be considered to be correct. However, the shape of the circle is distorted in some parts. These distortions may be due to the small amount of multipath which is seen in Figure 11 as well. The estimated trajectories of Case 1, 3, and 4 are shown in Figure 12, 13, and 14, respectively.Figure 11. Horizontal trajectory of the rover PL (PRN36)in Case 2.Figure 12. Horizontal trajectory of the rover PL (PRN36)in Case 1.Figure 13. Horizontal trajectory of the rover PL (PRN36)in Case 3.Figure 14. Horizontal trajectory of the rover PL (PRN36)in Case 3.A true evaluation of the positioning accuracy cannot be performed because the reference position of the rover PL was not measured. Therefore, the distance from the center of circle to the estimated horizontal position of PL36 was compared to the known radius at each epoch. As shown in Table 3, the standard deviations are about five millimeters,and therefore it can be concluded that the PL-based inverted GPS positioning was possible in the kinematic mode.Table 3. Standard deviations of the estimated radiusCase Radius(cm)Numberof dataStandarddeviation (cm)1247630.5222432170.4833511590.4641914720.41 CONCLUSIONSThe PL-based inverted-GPS positioning experiments were conducted in kinematic mode. By using the multipath resistant antennas for the receivers and the rover pseudolite, kinematic positioning and ambiguity resolution was performed successfully. The fundamental methodology of inverted GPS for the airship-based positioning system has been established in a series of ground experiments, and will be improved following flight experiments using an aircraft/helicopter.ACKNOWLEDGMENTSWe would like to thank DX antenna Co. Ltd., Furuno Electric Co. Ltd., and Mr. Takayuki Goto of Tokyo Metropolitan Institute of Technology for useful discussions and their assistance.REFERENCESAltmayer, C. (1998). Experiences using pseudolites to augment GNSS in urban environment, 11th Int. Tech.Meeting of the Satellite Division of the U.S. Inst. of Navigation, Nashville, Tennessee, September 15-18, 981-991.Barltrop, K., J. Stafford, & B. Elrod (1996). Local DGPS with pseudolite augmentation and implementation considerations for LAAS, 9th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Kansas City, Missouri, September 17-20, 449-459. Barnes, J., J. Wang, C. Rizos, & T. Tsujii (2002). The performance of a pseudolite-based positioning system for deformation monitoring. 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 326-327.Cobb, S. (1997). GPS Pseudolites: Theory, Design, and Applications, Ph.D. Thesis, Stanford University.Dai L., J. Wang, T. Tsujii & C. Rizos (2001). Pseudolite-based inverted positioning and its applications. 5th Int.Symp. on Satellite Navigation Technology & Applications, Canberra, Australia, 24-27 July, CD-ROM.Dovis, F., G. Kandus, E. Magli, & G. Olmo, (2000).Integration of stratospheric platforms within the GNSS2 system, GNSS2000, Edinburgh, U.K., May 1-4.Pervan, B., & B. Parkinson (1997). Cycle ambiguityestimation for aircraft precision landing using the Global Positioning System, J. of Guidance, Control, & Dynamics, 20(4), 681-689.Pachter, M., & J. McKay (1998). Geometry optimization ofa GPS-based navigation reference system, J. of theInstitute of Navigation, 44(4), 457-470.Raquet, J., G. Lachapelle, W. Qui, C. Pelletier, A. Nash, P.Fenton, & T. Holden (1995). Development and testing of a mobile pseudolite concept for precise positioning, 8th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Palm Springs, California, 12-15 September, 817-825.Stone, J., & D. Powell, (1999). Precise positioning using GPS satellites and pseudolites emphasizing open pit mining applications, 4th Int. Symp. on Satellite Navigation Technology & Applications, Brisbane, Australia, 20-23 July.Tsujii, T., M. Murata, M. Harigae, T. Ono & T. Inagaki (1998). Development of Kinematic GPS Software, KINGS, and flight test evaluation, Technical Report of National Aerospace Laboratory, Japan, TR-1357T. Tsujii, T., C. Rizos, J. Wang, L. Dai, C. Roberts & M.Harigae (2001). A navigation/positioning service based on pseudolites installed on stratospheric airships, 5th Int. Symp. on Satellite Navigation Technology & Applications, Canberra, Australia, 24-27 July, CD-ROM.Tsujii, T., M. Harigae, J. Barnes, J. Wang, & C. Rizos (2002). A Preliminary Test of the Pseudolite-Based Inverted GPS Positioning in Kinematic Mode, 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 442-451. Wang, J., T. Tsujii, C. Rizos, L. Dai & M. Moore (2001).GPS and pseudo-satellites integration for precise positioning, Geomatics Research Australasia, 74, 103-117.Wang, J., L. Dai, T. Tsujii, C. Rizos, D. Grejner-Brzezinska, & C.K. Toth, (2001).GPS/INS/Pseudolites: Concepts, simulation and testing, 14th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Salt Lake City, Utah, 11-14 September, 2708-2715.Yokomaku, Y. (2000). Overview of stratospheric platform airship R&D program in Japan, Stratospheric Platform Systems Workshop SPSW2000, Tokyo, Japan, 21-22 September, 15-23.。