《船舶原理》练习题第1、2章(航海)【第1章】船型尺度初步(L,B,D,d) (1)
【第2章】船舶吃水d初步 (1)
【第2章】TPC初步练习 (2)
【第2章】水密度对吃水之影响 (3)
【第2章】排水量Δ初步 (4)
【第2章】静水力曲线常用量 (6)
【第2章】干舷与储备浮力 (7)
【第1章】船型尺度初步(L,B,D,d)
·1 船舶在登记
..、丈量时使用的尺度是。
A.最大尺度 B.型尺度
C .登记尺度 D.以上均可
·2 判断船舶能否停靠某一码头时所使用的尺度
是。
A.型尺度 B.理论尺度
C.登记尺度D.最大尺度
·3 船舶在设计时使用的尺度为。
A.船型尺度 B.理论尺度
C.实际尺度 D.最大尺度
·4 船舶实际吃水与型吃水两者相比。
A.相差50mm B.相差龙骨板厚度
C.相差无定值 D.两者在数值上一致
·5 从船舶型线图上量取的尺度为。
A.最大尺度B.型尺度
C.登记尺度 D.实际尺度
·6型线图中船舶横剖线图上是直线。
A. 水线面和纵剖面
B. 水线面和横剖面
C. 横剖面和纵剖面
D. 仅横剖面
·7过船宽中点的纵向垂直称为。
A. 平面,中站面
B. 剖面,中纵剖面
C. 平面,基平面
D. 剖面,中横剖面
·8采用近似计算公式的条件之一是曲线下面积
的等分数必须为。
A. 辛氏第一法,偶数
B. 梯形法,偶数
C. 辛氏第一法,奇数
D. 梯形法,奇数·9已知某船L bp=78,宽B=16.4m,水线面面积为921m2,则其水线面积系数为C W为______。
A.0.77 B.0.65 C.0.68 D.0.72
·10某船L bp=78m,吃水d m=4.80m,船宽B=12.2m,排水体积为2924m3,则其方形系数C b为_______。(小吨位船试题) A.0.53 B.0.64 C.0.73 D.0.68
·11某船方型系数C b=0.63,长宽比L/B=6,宽吃水比
B/d=2.4,平均吃水5.17m,则船舶排水体积______ m3。(小吨位船试题)
A.4123 B.3681 C.3106 D.3009
·12某船吃水d m=5.23m,宽B=16.4m,中横剖面面积为71m2,则其中横剖面系数C m为______。
A.0.65 B.0.72 C.0.80 D.0.83
·13已知某船L bp=78,宽B=16.4m,水线面面积为921m2,则其水线面积系数为C W为______。
A.0.77 B.0.65 C.0.68 D.0.72
【第2章】船舶吃水d初步
·1 商船水尺读数表示。
A. 水面至水底深度
B. 水面到船底深度
C. 水底至船底深度
D. 水线到甲板的高度
·2 船舶型吃水与实际吃水相差_________。
A.龙骨板厚度 B.上甲板厚度C.二层甲板厚度 D.船壳板厚度
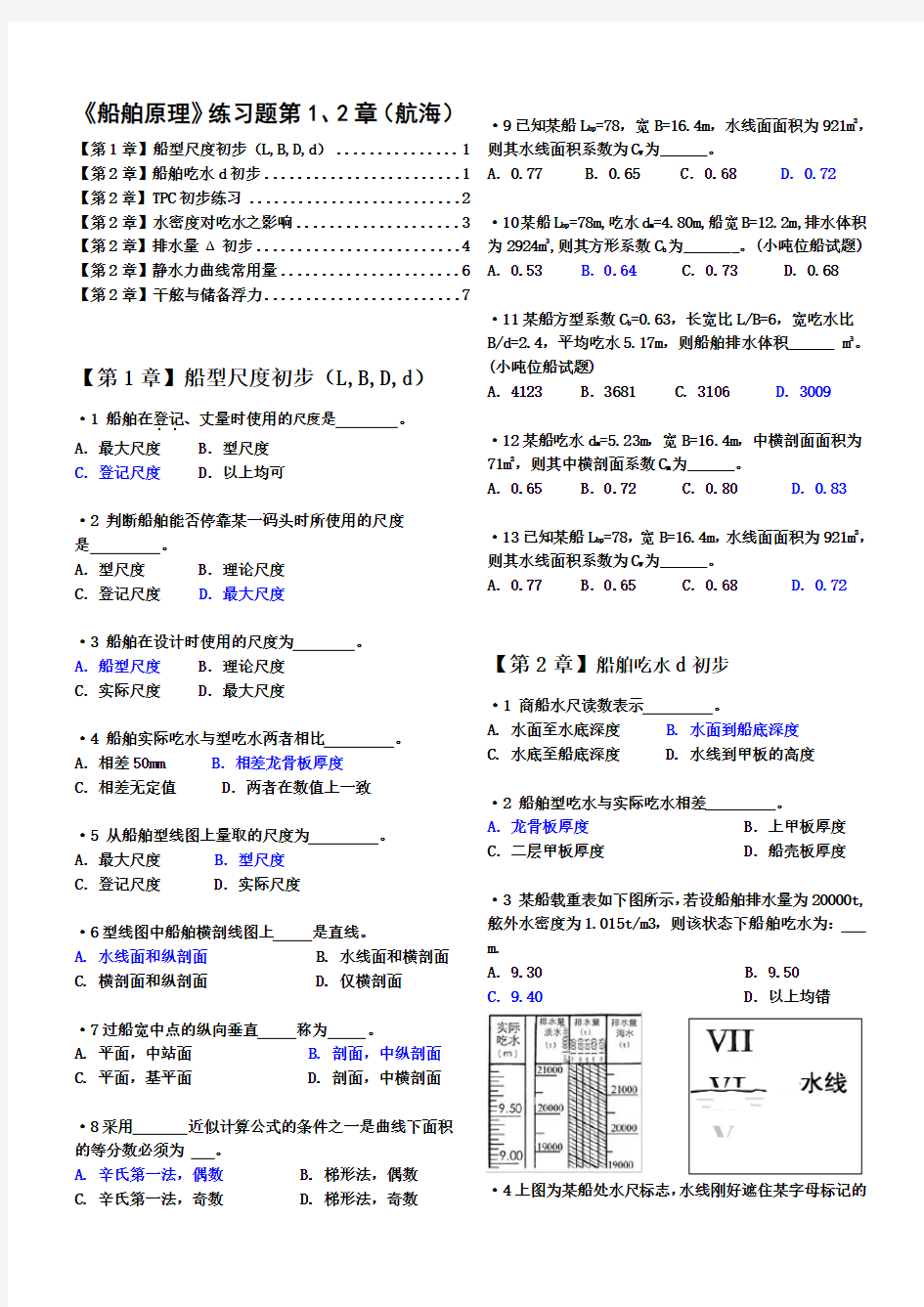
·3 某船载重表如下图所示,若设船舶排水量为20000t, 舷外水密度为1.015t/m3,则该状态下船舶吃水为:
m.
A.9.30 B.9.50 C.9.40 D.以上均错
·4上图为某船处水尺标志,水线刚好遮住某字母标记的
一半
..,试判断该处的吃水读数是:。
A.6 ft 3 in B.6.5 m
C.6 ft 6 in D.5.5 m
·5在图上可直接查得船舶纵倾状态下的排水体积。
A. 邦金曲线
B. 费尔索夫图谱
C. 静水力曲线
D. A和B均对
·6 当漂心位于船中
..且船体无拱垂变形时,按d m
=(d F+d A)/2计算的平均吃水为。
A. 近似值
B. 准确值
C. 经验值
D. 视吃水差的大小而定
·7 某轮在某装载状态下的一处水线位于水尺标志“Ⅷ”字体高度一半处,则该处的吃水为。A. 8.00 m B. 8.05 m
C. 8英尺3英寸
D. 8英尺6英寸
·8 某轮在某装载状态下的一处水线位于水尺标志“Ⅸ”字体的底边缘,则该处的吃水为。
A. 8英尺6英寸
B. 9英尺
C. 9英尺3英寸
D. 9英尺6英寸
·11 当船舶某装载状态下的某处水线达到水尺标志的
数字的处时,则该处的吃水为该数字加上
10cm。
A. 顶边缘
B. 底边缘
C. 中间
D. 1/3处
·13 当船舶某装载状态下的某处水线达到水尺标志的
数字的处时,则该处的吃水为该数字加上5cm。
A. 中间
B. 顶边缘
C. 底边缘
D. 1/3处
·14 在水尺标志中,其数字高度和两数字间距。A.公制为10cm,英制为3英寸
B.公制为10cm,英制为6英寸
C.公制为5cm,英制为3英寸
D.公制为5cm,英制为6英寸
·15 当船尾水线达到船尾水尺标志数字的处时,则船尾吃水为该数字。
A.上边缘B.下边缘
C.中间 D.1/3处·16 某轮测得船首水线位于水尺标志“Ⅳ~Ⅴ”字体
间距的一半处,则其首吃水为。
A.4英尺6英寸B.4英尺9英寸
C.5英尺 D.5英尺3英寸
·18 某轮测得船中水线位于水尺标志“Ⅷ”字体高
度一半处,则其船中吃水为________。
A.8.00m B.8.05m
C.8英尺3英寸 D.8英尺6英寸
·20某轮L=120.5m,X f=-2.80m,d F=8.65m,d A=9.76m。则其平均吃水为 m。
A.8.97
B.8.96
C.8.93
D. 9.00 【第2章】TPC初步练习
·1 某轮排水量为19000t,TPC为24t/cm,到港时船舶平均吃水减小0.2m,则到港时排水量吨。
A. 18520t
B. 16600t
C. 15200t
D. 11800t
按:19000-(0.2*100)*24
·5 某轮在始发港开航时吃水d=10m,TPC=20t/cm,途中耗油水300t,中途港卸货1000t后又加装货物500t,其它因素不计,问该轮从中途港开出后吃水 m。
A. 9.60
B. 9.90
C. 10.10
D. 10.40
按:(-300-1000+500)/20/100+10
·6 某轮平均吃水d m=8m ,查得型排水体积▽=16160m3,船壳系数K=1.0056。此时该轮在标准海水中排水量为
t。
A. 16656.8
B. 16250.5
C. 16564.0
D. 16471.1
按:16160*1.0056*1.025
·7 某轮吃水d=7.00m时水线面面积A W=1200m2,则船舶的淡水
..厘米吃水吨数为 t/cm。
A. 12.0
B. 12.3
C. 13.0
D. 13.5
按:1200*0.01*1.0
·8 某轮吃水d=9.00 m时水线面面积A W =1800 m2,则
船舶的海水
..厘米吃水吨数为。
A. 16.0
B. 18.1
C. 18.45
D. 16.4
按:1800*0.01*1.025
·10某轮的船壳系数K = 1.006,在某一吃水时其型排水体积V =12500立方米,则其水下外板及附体的排水体积为立方米。
A. 75
B. 90
C. 108
D. 12575
按:12500*(1.006-1)
·11 某船装货前平均吃水为12.63m,每厘米吃水吨数26.7t/cm,则该轮装载562t货物后平均吃水为 m。A.8.84 B.12.90
C.12.87 D.12.84
按:(562/26.7)/100+12.63
【第2章】水密度对吃水之影响
·1 当船舶排水量一定时,由淡水港进入海水港
则。
A. 吃水增加
B. 吃水减少
C. 吃水不变
D. 变化趋势不定
·2 船舶由海水水域驶入淡水水域时,若不计其油水消耗,则船舶所受浮力。
A. 减少
B. 增加
C. 不变
D. 变化不定
·4 海水密度的增加。
A. 将减小船舶的排水量
B. 将增加船舶的排水量
C. 不影响排水量
D. 对排水量的影响不能确定
·5 船舶由海水驶入淡水时。
A. 排水量不变,吃水增加,浮心后移,略有首倾
B. 排水量不变,吃水增加,浮心前移,略有尾倾
C. 排水量不变,吃水增加,浮心位置及纵倾状态的变化趋势不定
D. 排水量不变,吃水减小,浮心位置及纵倾状态的变化趋势不定
·9 船舶由海水水域进入淡水水域常常发生变化。
A.浮心 B.重心 C.吃水D.A和C ·10 当船舶从淡水水域驶入海水水域时。A.吃水增大B.吃水减小
C.吃水不变 D.变化趋势不定
·12 当船舶舷外水密度减少时,船舶所受浮
力。
A.减少 B.增加C.不变 D.变化不定
·13 某轮排水量Δ=10000t,d=9.0m,TPC=20t/cm,此时若由淡水区域进入海水区域,则吃水。
A. 增加0.125m
B. 减少0.125m
C. 变为8.875m
D. B、C均对
·14 为保持某轮在密度为1.008的水域中与在标准海水中的吃水不变,需卸下货物322t,则该轮在标准海水中的排水量为 t。
A. 19092.7
B. 19414.7
C. 13202.4
D. 条件不足,无法计算
吃水不变即排水体积不变,排水差异=(1.025-1.008)*体积=322t,体积=322/.017,海水排水量
=322/.017*1.025
·15 某轮原平均吃水为6.10m,加载100t货物后平均吃水变为6.18m,此时的TPC为 t/cm。
A. 8.0
B. 10.0
C. 12.0
D. 12.5
100/[(6.18-6.10)*100]
·17 船舶在甲港(ρ=1.025g/cm 3 )装载后,排水量
Δ=10200t,首吃水为8.30m,尾吃水为8.50m,
TPC=20.0t/cm,然后驶往乙港(ρ=1.000g/cm 3),航行途中消耗油水200t,问:船舶由甲港出发抵达乙港时的平均吃水改变量为 m。
A. +0.025
B. -0.025
C. +0.225
D. -0.225
)
025
.1
1
000
.1
1
(
100
*
20
025
.1*)
200
10200
(
100
*
20
200
)
1
1
(
100
)
(
100
1
1
-
-
+
-
=
-
+
?
+
=
-
∑
∑
ρ
ρ
ρ
TPC
P
TPC
P
d
d s
m
·18 某万吨轮在标准密度淡水中满载吃水为7.00m,进入标准密度海水水域后船舶吃水为。(方法二)
A. 6.65m
B. 6.83m
C. 7.10m
D. 7.28m
·19 某轮排水量为12000t ,TPC=15t/cm ,由标准淡水水域驶进标准海水水域,则船舶的吃水将 。 (方法三)
A. 减少0.2m
B. 增加0.2m
C. 不变
D. 无法计算
·20 某船从密度为ρ1=1.021g/cm 3
的水域驶入密度为ρ2=1.003g/cm 3
的水域,船舶排水量Δ=64582t,每厘米吃水吨数TPC=54.41t/cm,则船舶平均吃水改变量δd ρ= cm 。(方法一)
A. 20.6
B. 19.9
C. 22.1
D. 21.4
·21 船舶由水密度ρ=1.010g/cm 3
的水域驶入标准海水水域,吃水约减小 。 (方法二) A .1.5% B .3.0% C .4.5% D .6.0%
·22 某船从水密度1.023g/cm 3
的水域驶入水密度1.007 g/cm 3
的水域,吃水约增加 %。 (方法二) A .1.0 B .1.6 C .2.1 D .1.3
·23 为保持平均吃水相同,某船从ρ=1.023g/cm 3
的水域中驶入ρ=1.006g/cm 3
的水域时需卸下货物121t ,则该吃水时在ρ=1.006 g/cm 3中的排水量为 t 。
A .7118
B .7160
C .7282
D .7269 121/(1.023-1.006)*1.006
·24 某船标准海水中吃水为5.51m 时排水量Δ=5484
t ,TPC=12.4 t/cm ,现该轮从标准海水区域驶入标准淡水
区域中,则船舶吃水变为 m 。 A .5.51 B .5.62 C .5.57 D .5.64
)
025
.11
000.11(100*4.12025.1*)05484(51.5)
11(100)(01--+
=-+?+∑ρρρTPC P d s m
·25 船舶在淡水中吃水为7.0m ,则驶入海水水域后吃水有可能是 。
A .6.88m
B .7.00m
C .7.10m
D .6.18m
淡水密度只比海水低一点点,答案只可能小于7但不会小很明显。
·26 某轮按标准海水密度计算出的排水量为17861t,但测得周围海水密度为1.009g/cm 3
,则该轮经水密度修正后的排水量为 t 。 A .18144 B .17582 C .17931 D .17353 (17861/1.025*1.009)
·27 某船排水量Δ=20830t,TPC=23.7t/cm ,从ρ=1.023g/cm 3
的港口装货驶往ρ=1.005g/cm 3
的目的港,已知到达目的港平均吃水为8.0m 且途中油水消耗共166t,出发时该轮平均吃水 。(方法一)
A .8.00
B .8.05
C .7.91
D .7.94
)
023
.11005.11(100*7.23025.1*)16620830(100*7.23166)
1
1(100)(10080
1--+-+
=-+?+
+=∑∑m s m d TPC P TPC
P
d ρρρ
【第2章】排水量Δ初步
·1 船舶的空船重量包括 。 A. 船体、机器设备及船员行李的重量 B. 锅炉中的燃料、冷凝器中水的重量 C. 船体、机器设备及船舶舾装的重量 D. B+C
·3 空船排水量不包括 。 A .船体、机器及设备重量 B .锅炉中的燃料和水 C .冷凝器中的淡水 D .船员、行李和备品
·4 船舶资料中列出的满载排水量通常是指 。
A. 冬季排水量
B. 夏季排水量
C. 热带排水量
D. 淡水排水量 ·【第
2章】静水力曲线初步
·1 根据我国的规定,在使用静水力曲线图查取 曲
线时,其计量长度应自船中处量起。
A. 方形系数C b
B. 浮心距船中距离X b
C. 漂心距基线高度
D. 横稳心M距船中距离
·2 船舶静水力曲线图是表示船舶正浮状态下的
与吃水的关系曲线的总称。
A. 船型系数
B. 静稳性要素
C. 浮性要素、初稳性要素
D. A+C
·3 在查取我国静水力曲线图中的曲线时,其计量长度应自船中处量起。
A. 重心距船中距离X g
B. 漂心距船中距离X f
C. 漂心距基线高度
D. 水线面面积系数C W曲线
·5 船舶静水力曲线图的纵向坐标通常表示船舶
的。
A. 平均型吃水
B. 平均实际吃水
C. 复原力臂
D. 满载吃水
·6 船舶的垂向棱形系数越大,表明船舶。
A. 水下船体形状在纵向上越肥胖
B. 水下船体形状在纵向上越瘦削
C. 水下船体形状在垂向上越肥胖
D. 水下船体形状在垂向上越瘦削
·7 船舶的方形系数越大,表明船舶:
A. 水下船体形状越肥胖
B. 水下船体形状越瘦削
C. 水下船体形状的变化趋势不定
D. 其大小与水下船体形状无关
·8 在静水力曲线图中,查出的数据相互成正比。
A. 淡水排水量曲线和海水排水量曲线
B. 水线面面积曲线和厘米吃水吨数曲线
C. 海水排水量曲线和海水型排水体积曲线
D. A、B和C ·9 船舶的水线面系数越大,表明船。
A. 水线面形状越肥胖
B. 水线面形状越瘦削
C. 水线面形状的变化趋势不定
D. 水线面形状的肥瘦与水线面系数无关
·10 船舶的中横剖面系数越大,表明船舶。
A. 水线下中横剖面形状越肥胖
B. 水线下中横剖面形状越瘦削
C. 水线下中横剖面形状的变化趋势不定
D. 水线下中横剖面形状的肥瘦与其系数无关
·11 由静水力曲线图可知,船舶排水量的变化规律是。
A. 随吃水的增加而线性增加
B. 吃水较小时随吃水的增加较快,吃水较大时随吃水的增加较慢
C. 吃水较小时随吃水的增加较慢,吃水较大时随吃水的增加较快
D. 随吃水的增加而增加,但增加的幅度在减小
·12 由静水力曲线图可知,船舶排水体积的变化规律是。
A. 随吃水的增加而线性增加
B. 吃水较小时随吃水的增加较快,吃水较大时随吃水的增加较慢
C. 吃水较小时随吃水的增加较慢,吃水较大时随吃水的增加较快
D. 随吃水的增加而增加,但增加的幅度在减小
·13 船舶静水力曲线图是表示船舶在静止、正浮状态下其。
A. 船体受力情况的曲线
B. 吃水与各特性参数的关系曲线
C. 吃水与载荷弯矩的关系曲线
D. 静稳性力臂与船舶横倾角的关系曲线
·14 以下曲线可以很容易地在船舶静水力曲线图中查到。
A. 沿船长方向的浮力分布曲线及重量分布曲线
B. 甲板浸水角、极限静倾角及初稳性高度
C. 横摇角、受风面积及进水角曲线
D. 漂心距船中距离曲线、厘米纵倾力矩及横稳心距基线高度曲线
·15 在实际工作中,为了计算不同吃水时的装货重量,
船舶可供查取的资料是。
A. 载重表尺
B. 静水力曲线图
C. 静水力特性参数表
D. A、B、C均是
·16 表征船舶在静止正浮状态下其平均吃水与船舶若
干性能参数的一组关系曲线称为。
A. 静水力特性参数表
B. 静稳性曲线图
C. 静水力曲线图
D. 动稳性曲线图
·17 根据我国的规定,在使用静水力曲线图查取漂心距船中距离X f时,以下说法正确的是。
A. 不论漂心F在船中的前或后,X f均为负(-)
B. 不论漂心F在船中的前或后,X f均为正(+)
C. 漂心F在船中后,X f为负(-);在船中前为正(+)
D. 漂心F在船中后,X f为正(+);在船中前为负(-)
·19 静水力曲线图中,关于漂心的曲线一般包括
曲线。
A.漂心距船中B.漂心距基线
C.漂心距船首 D.A、B都对
·21静水力曲线图中,由型排水体积计算船舶排水量时,应进行修正。
A.漂心 B. 首尾垂线
C.纵倾D.船壳系数
·22 静水力曲线图中,由型排水体积计算船舶排水量时,应进行船舶系数K的修正,对排水量大的船舶,K 值。
A.稍大B.稍小
C.相同 D.以上均有可能
·23 静水力曲线图中的垂向坐标为,坐标原点在船中的有。
A.实际吃水,漂心、浮心纵坐标
B.型吃水,漂心、浮心纵坐标
C.型吃水,浮心、稳心纵坐标
D.实际吃水,漂心、稳心纵坐标
·24 静水力曲线图中包括。
A.重量沿船长方向的分布曲线
B.甲板浸水角和初稳性高度曲线C.横摇角及进水角曲线
D.漂心距船中距离曲线和横稳心距基线高度曲线
·25 船壳系数是指。因此,其值。A.型排水体积与实际排水体积之比;大于1
B.实际排水体积与型排水体积之比;大于1
C.船壳厚度的比值;大于1
D.A和C
·26 根据_______计算船舶不同吃水时的船舶排水量。A.船舶载重表尺
B.船舶静水力曲线图
C.船舶静水力特性参数表
D.以上均是
【第2章】静水力曲线常用量
·1 船舶的每厘米吃水吨数TPC是指________。
A. 平均吃水变化1厘米时所需要的纵倾力矩值
B. 平均吃水变化1厘米时所需要加减载荷的吨数
C. 吃水差变化1厘米时所需要的纵倾力矩值
D. 吃水差变化1厘米时所需要加减载荷的吨数
·2 船舶浮心B是指。
A. 总重量的中心
B. 受风面积的中心
C. 水线面面积的中心
D. 水下排水体积形状的几何中心
·3 船舶漂心F是指。
A. 排水体积的形心
B. 水线面面积的几何中心
C. 所受重力的作用中心
D. 倾斜前后两条浮力作用线的交点
·4 将增大船舶的浮心高度。
A. 由舱内卸货
B. 在甲板上装货
C. 将货物上移
D. 将货物下移
·5 船舶平行沉浮的条件是:少量载荷装卸于的垂直线上。
A. 漂心
B. 稳心
C. 浮心
D. 重心
·6 下列一定位于船舶水线以下。
A. 船舶稳心
B. 船舶漂心
C. 船舶浮心
D. 船舶重心
·7 每厘米吃水吨数TPC曲线的用途主要是计算船舶的。
A. 吃水差的改变量
B. 初稳性高度的变化量
C. 平均吃水及装载量的变化值
D. 重心高度的变化量
·8 每厘米吃水吨数TPC在情况下,计算船舶的误差较小。
A. 大量装卸,平均吃水改变量
B. 少量载荷变动,排水量改变量
C. 少量载荷变动,平均吃水改变量
D. B、C均对
·9 船舶的浮心B是指。
A. 船舶排水体积的形心
B. 船舶排水体积的几何中心
C. 船舶所受浮力的作用中心
D. A、B、C都是
·10 对于箱形船而言,船舶的每厘米吃水吨数TPC随船舶吃水的增加而。
A.增加B.不变 C.减少 D.A、B均是
·12 通常情况下,每厘米吃水吨数TPC随船舶吃水的增大而。
A.增大 B.减小 C.不变 D.变化趋势不定
·13 杂货船的排水量为2000t,则应用TPC曲线可以相对较准确地计算下述哪种情况下平均吃水的改变量?
A. 加载300吨货物
B. 卸载160吨货物
C. 加载90吨货物
D. B,C均可
·15 当船舶吃水增加时,船舶的一定增大。A.浮心距船中距离
B.漂心距船中距离
C.横稳心距基线高度
D.浮心距基线高度
·16 对于箱形驳船,其横稳心距基线高与船舶的
无关。A.船长B.船宽 C.舷外水密度 D.船舶吃水
·17 船舶少量装载时,可用计算吃水改变量。A.厘米纵倾力矩B.厘米吃水吨数
C.初稳性高度 D.静稳性力臂
·18 船舶的厘米吃水吨数与船舶有关。
A.初稳性 B.纵稳性
C.水线面面积 D.水线下船体形状
·19 船舶的厘米纵倾力矩与船舶有关。
A.大倾角稳性B.纵稳性
C.横稳性 D.动稳性
·20水线下船体排水体积形状的几何中心称为。A.漂心 B.重心 C.稳心D.浮心
·21 船舶厘米吃水吨数与船舶的无关。
A.吃水 B.垂线间长
C.舷外水密度D.重心高度
·22 箱形驳船正浮时,对于漂心纵向和横向坐标x f 、y f,下列成立。
A.x f=0,y f=0
B.漂心在船中前后一定距离内
C.X f≠0,y f=0
D.X f随吃水不同而变化
【第2章】干舷与储备浮力
·1 船舶的储备浮力是指。
A. 水密空间的大小
B. 保留的排水体积
C. 所保留的干舷高度值
D. 设计水线以上船体水密空间所提供的浮力
·2 船舶干舷越大,表示船舶的越大。
A. 纵强度
B. 设计吃水
C. 吃水差
D. 储备浮力
·3 F表示干舷,d表示型吃水,D表示型深,则它们之间的近似表达式是。
A. D=F-d
B. d=F-D
C. F=d-D
D. F=D-d
·5 船舶干舷是根据勘定的。
A. 建造规范
B. 稳性规范
C. 载重线公约
D. 抗沉性规范
·6 船舶干舷可表示为F=D-d+δ,其中δ是
指。
A. 船舶平板龙骨的厚度
B. 船舶干舷甲板的厚度
C. 船舶横梁的厚度
D. 船舶吃水的修正量
·7设船舶设计满载吃水为d S,实际吃水为d,型深(平板龙骨上缘至上甲板衡梁上缘)为D,干舷甲板厚度为δ,则船舶夏季干舷高度F为。
A. F=D-d S
B. F=D-d S+δ
C. F=D-d
D. F=D-d+δ
·8 同一船舶装货越多,其干舷越,储备浮力就越。
A. 小;小
B. 小;大
C. 大;小
D. 大;大
航海技术专业实习日记 ----WORD文档,下载后可编辑修改---- 下面是作者为各位家长学生收集整理的作文(日记、观后感等)范本,欢迎借鉴参考阅读,您的努力学习和创新是为了更美好的未来,欢迎下载! 航海技术专业实习日记一 我是比较早去上船实习的。那天,接到了公司的电话,说让我三天以后去公司报道,然后进行为期三个月的实习。当我接到电话以后,既担心,又兴奋。担心的是第一次上船,什么都不懂,该怎么办才好。但同时心里也很兴奋,因为我总算可以见到我期待已久的大海了。终于到了那一天,我第一次踏上了大船,也就意味着我的实习开始了。这是一艘香港到新加坡的散货船。刚开始来到船上的时候,感觉什么都很新鲜,虽然有的东西在学校里就已经见过,但还是觉得很好奇。船上的一切都吸引着我。干净的甲板,蔚蓝的大海,和蔼可亲的同事,感觉还不错。 航海技术专业实习日记二 我是比较早去上船实习的。那天,接到了公司的电话,说让我三天以后去公司报道,然后进行为期三个月的实习。当我接到电话以后,既担心,又兴奋。担心的是第一次上船,什么都不懂,该怎么办才好。但同时心里也很兴奋,因为我总算可以见到我期待已久的大海了。 终于到了那一天,我第一次踏上了大船,也就意味着我的实习开始了。这是一艘香港到新加坡的散货船。刚开始来到船上的时候,感觉什么都很新鲜,虽然有的东西在学校里就已经见过,但还是觉得很好奇。船上的一切都吸引着我。干净的甲板,蔚蓝的大海,和蔼可亲的同事,感觉还不错。 说快也快,一眨眼的功夫,一周的实习期也就熬过来了。 航海技术专业实习日记三 本周实习我觉得: 1、学生通过接触社会、深入实践,更多地了解国情、了解世界、了解经济建设和改革开放的成就、了解我国海员为海运事业蓬勃发展所做的贡献,进一步树立为繁荣祖国海运事业而奋斗的志向。
1、GPS卫星导航系统分为距离型、多普勒型和距离多普勒混合型系指按( )分类。 A.工作方式 B.工作原理 C.测量的导航定位参量 D.用户获得的导航定位数据 2、GPS卫星导航系统是( )导航系统。 A.近距离 B.远距离 C.中距离 D.全球 3、GPS卫星导航系统是一种( )卫星导航系统。 A.多普勒 B.测距 C.有源 D.测角 4、GPS卫星导航仪可为( )定位。 A.水上、水下 B.水下、空中 C.水面、海底 D.水面、空中 5、卫星的导航范围可延伸到外层空间,指的是从( )。 A.地面 B.水面 C.近地空间 D.A+B+C 6、GPS卫星导航系统可为船舶在( )。 A.江河、湖泊提供定位与导航 B.港口及狭窄水道提供定位与导航 C.近海及远洋提供定位与导航 D.A+B+C 7、GPS卫星导航仪可为( )。 A.水下定位 B.水面定位 C.水面、空中定位 D.水下、水面、空中定位8、GPS卫星导航可提供全球、全天候、高精度、( )。 A.连续、不实时定位与导航 B.连续、近于实时定位与导航 C.间断、不实时定位与导航 D.间断、近于实时定位与导航 9、GPS卫星导航系统可提供全球、全天侯、高精度、连续( )导航。 A.不实时 B.近于实时 C.水下、水面 D.水下、水面、空中 10、GPS卫星导航系统可提供全球全天侯高精度( )导航。 A.不实时 B.连续近于实时 C.间断不实时 D.间断近于实时 11、GPS卫星导航系统与NNSS卫星导航系统相比较,其优点是( )。 A.连续定位 B.定位精度高 C.定位时间短 D.A+B+C 12、GPS卫星导航系统由( )部分组成。 A.2 B.3 C.4 D.5 13、GPS卫星导航系统由( )颗卫星组成。 A.24 B.18 C.30 D.48 14、GPS卫星分布在( )个轨道上。 A.3 B.6 C.18 D.24 15、GPS卫星导航系统共设置( )颗GPS卫星,分布在( )个轨道上。 A.21+3,8 B.18+3,6 C.21+3,6 D.18+3,8 16、GPS卫星的轨道高度为( )千米。 A.1946 B.1948 C.1100 D.20183 17、GPS卫星运行的周期为( )。 A.3小时 B.6小时 C.12小时 D.106分钟
大学计算机基础思考题 第一章计算机与信息社会 1. 计算机的发展经历了哪几个阶段?各阶段的主要特征是什么? 第一代电子计算机——电子管 第二代电子计算机——晶体管电路 第三代电子计算机——集成电路 第四代电子计算机——大规模集成电路 2. 按综合性能指标,计算机一般分为哪几类? 1 高性能计算机 2 微型计算机(个人计算机) 3 工作站 4 服务器 5 嵌入式计算机 3. 信息与数据的区别是什么? 数据是信息的载体。信息有意义,而数据没有。但当数据以某种形式经过处理、描述或与其他数据比较时,便赋予了意义。 第二章计算机系统 1. 简述计算机执行指令的过程。 1)取指令2)分析指令3)执行指令4)一条指令执行完成,程序计数器加1,然后回到1)。 2. 存储器的容量单位有哪些?若内存的大小为512MB,则它有多少个字节? 单位:B KB MB GB TB 512MB=512×1024×1024 B 3. 指令和程序有什么区别? 指令是能被计算机识别并执行的一串二进制代码,它规定了计算机能完成的某一种操作。 程序是由一系列指令组成的。 4. 简述机器语言、汇编语言、高级语言各自的特点。 (1)机器语言是由二进制代码0和1按一定规则组成的、能被机器直接理解和执行的指令集合。 (2)汇编语言是使用一些反应指令功能的助记符代替机器语言的符号语言(3)高级语言是一种接近于自然语言和数学公式的程序设计语言。
5.计算机的硬件系统由哪几部分构成?主机主要包括了哪些部件? 硬件系统由主机和外部设备组成,主机主要包括中央处理器(CPU)和内存,外部设备包括输入设备、输出设备和外存。 6.衡量CPU性能的主要技术指标有哪些? (1)CPU字长,CPU内部各寄存器之间一次能够传递的数据位,即在单位时间内能一次处理的二进制的位数。 (2)位宽,CPU通过外部总线与外部设备之间一次能够传递的数据位。 (3)x位CPU,通常用CPU的字长和位宽来称呼CPU (4)CPU外频,即CPU总线频率,是由主板为CPU提供的基准时钟频率 (5)CPU主频,也叫工作频率,是CPU内核电路的实际运行频率。 (6)CPU的生产工艺技术,通常用微米来描述,精度越高表示生产工艺越先进。 7. 内存和外存有什么区别?若内存大小为1G,则它有多少个字节? 内存和外存有很多不同之处: 1)内存可以直接被CPU访问,外存不能直接被CPU访问 2)内存信息是暂时的,外存信息可以永久保存的 3)相对来说,内存容量小价格高,外存容量大价格低 4)内存速度快,内存速度慢。 1G=1024×1024×1024 B 8. 系统主板主要包括了哪些部件? CPU插座、控制芯片组、BIOS芯片、内存内插槽、各种接口、AGP总线扩展槽、PCI扩展槽。 9.微型计算机的内部存储器按其功能特征可分为几类?各有什么区别? (1)随机存取存储器(Random Access Memory,简称RAM)。RAM通常指计算机主存,使用动态随机存储器,制作成内存条形式出现。CPU对它们既可读出又可写入数据。 (2)只读存储器(Read Only Memory,简称ROM)。CPU对他们只取不存,其信息用户无法修改。断电时信息不会丢失。ROM中一般存放计算机系统管理程序。 (3)高速缓冲存储器Cache,是介于CPU和内存之间的一种课高速存取信息的芯片,用于解决它们之间的速度冲突问题。 10.高速缓冲存储器的作用是什么? 高速缓冲存储器是CPU和RAM之间的桥梁,用于解决他们之间的速度冲突问题。
航海技术专业介绍 航海技术专业本科,学制:四年。本专业培养符合国际海事组织(IMO)制定的国际海员培训发证值班标准(STCW78/10),掌握现代航海理论和实践技能,能在海洋运输管理部门和海洋运输企事业单位从事海洋交通运输和船舶营运管理的高级航海技术人才。学生在校期间经过培训并通过国家海事局考试,可获得符合国际标准的适任、合格证书。本专业除特殊说明外只招男生,身高1.65米以上,无色盲、色弱,外语语种要求为英语。 主要课程:航海英语会话和阅读、船舶无线电技术基础、船舶原理、航海学、船舶结构与设备、船舶操纵、船舶值班与避碰、航海气象与海洋学、船舶安全与管理、航海仪器、GMDSS通信设备与业务、船舶货运、远洋运输业务与海商法等。 就业方向:海事局、救助局、打捞局、港航局、海洋局、航标处、边防、海警及各大航运公司。如北京中海海员对外技术服务有限公司、北京鑫裕盛船舶管理有限公司、山东对外经济技术合作集团有限公司、烟台大新华船员服务有限公司、青岛大通国际船舶管理有限公司、青岛英航国际船舶管理有限公司、上海森海海事服务有限公司、山东渤海轮渡股份有限公司、威海顺昌船舶管理有限公司等。也有部分学生考研深造。 Program Profile of Nautical Science Major Nautical Science Major : Undergraduate, Program Duration: 4 years.The professional training with the International Maritime Organization (IMO) to develop International Convention on Standards of Training, Certification and Watchkeeping for Seafarers (STCW78/10), master of modern navigation theory and practice skills in marine transportation management departments and marine transportation enterprises and institutions engaged in senior maritime technical personnel marine transportation and ship management. The students are trained and passed the National Maritime Bureau examination, can meet international standards, eligibility certificate. The professional male only except where noted, more than 1.65 meters tall, no color, color blindness, foreign language requirements for English Main course: Maritime English listening and Speaking, Ship Radio Technology Fundamentals, Ship Principles, Marine Navigation, Ship Construction & Equipments, Ship Handling, Ship Watch
1.从工程技术角度,陀螺仪的定义为 a)高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 b)转子及其悬挂装置的总称 c)具有三自由度的转子 d)高速旋转的对称刚体 2.何谓自由陀螺仪 a)重心与其中心相重合的三自由度陀螺仪 b)主轴可指向空间任意方向的陀螺仪 c)不受任何外力矩作用的平衡陀螺仪 d)高速旋转的三自由度陀螺仪 3.何谓陀螺仪的定轴性 a)其主轴指向地球上某一点的初始方位不变 b)其主轴动量矩矢端趋向外力矩矢端 c)其主轴指向空间的初始方向不变 d)相对于陀螺仪基座主轴指向不变 4.高速旋转的三自由度陀螺仪其进动性可描述为 a)在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径起向外力方向 b)在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变 c)在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 d)在外力矩的作用下,陀螺仪主轴即能自动找北指北 5.三自由度陀螺仪在高速转动时,其主轴将指向,若在垂直主轴方向上加外力矩, 主轴将 a)空间某一方向,产生进动 b)真北,指向真北 c)空间某一方向,保持指向不变 d)A和C对 6.在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度与 a)外力矩成正比,动量矩成正比 b)外力矩成反比,动量矩成反比 c)外力矩成正比,动量矩成反比 d)外力矩成反比,动量矩成正比 7.阿玛—勃朗10型罗经在北纬,航向190°航行的船上,出现的速度误差。 a)是东误差 b)是西误差 c)方向不定 d)只有纬度误差,无速度误差 8.自由陀螺仪的主轴动量矩指北,若加一外力矩,其方向水平向西,则主轴指北端 a)水平向东 b)水平向西 c)垂直向上 d)垂直向下 9.若在北纬,陀螺仪主轴作视运动,则 a)主轴视运动的角速度等于地球自转角速度 b)主轴指北端向东偏离子午面后又相对水平面上升
2017大学计算机基础答案 电子计算机的诞生 1 物理器件采用晶体管的计算机称为第()代计算机。 A 、一 B 、二 C 、三 D 、四 正确答案:B 2 时至今日,计算机仍采用存储程序原理,原理的提出者是()。 A 、莫尔 B 、冯. 诺依曼 C 、比尔. 盖茨 D 、图灵 正确答案:B 3 计算机科学的奠基人是()。 A 、查尔斯巴贝奇 B 、莫奇利和埃克特 C 、阿兰. 图灵 D 、冯. 诺依曼 正确答案:C 4 世界上第一台电子计算机诞生于()年。 A 、1939 B、1946 C、1952 D、1958 正确答案:B 5 计算机的发展经历了 4 个时代,各个时代划分的原则是根据()。 A 、计算机所采用的电子器件 B 、计算机的运算速度 C 、程序设计语言 D 、计算机的存储量 正确答案:A 6 ()是现代计算机的雏形。 A 、查尔斯巴贝奇于 1834 年设计的分析机 B 、宾夕法尼亚大学于 1946 年 2 月研制的 ENIAC C 、冯. 诺依曼小组研制的 EDVAC D、阿兰. 图灵建立的图灵机模型 正确答案:A 计算机系统的发展 1 下列()是衡量微处理器的主要指标。 A 、主频 B 、字长 C 、速度 D 、工艺正确答案:A , C 2 计算机系统的发展趋势不包括()。 A 、巨型化 B 、微型化 C 、智能化 D 、复合化正确答案:D 3 将 CPU 集成在一块芯片上所形成的元器件称为() A 、微处理器 B 、ROM C、CMOS D、Cache 正确答案:A 4 下列()不属于输入设备。 A 、扫描仪 B 、键盘 C 、硬盘 D 、体感设备正确答案:C
航海技术专业简介 专业代码600301 专业名称航海技术 基本修业年限三年 培养目标 本专业培养德、智、体、美全面发展,具有良好职业道德和人文素养,符合《海员培训、发证和值班标准国际公约》(STCW 公约)和《中华人民共和国海船船员适任考试和发证规则》要求,掌握船舶通信、船舶导航与定位、气象观测与分析、货物积载与系固、船舶作业和人员管理的基本知识,具备船舶驾驶、船舶无线电通信、船舶货物管理、船舶作业和人员管理能力,从事 3 000 吨及以上无限航区船舶三副等工作的高素质技术技能人才。 就业面向 主要面向航运企业、船员服务和劳务外派机构、港航企业、海事机构等企业单位,从事船舶驾驶、航运业务管理、海事管理、航运安全管理、船员教育和培训等工作。 主要职业能力 1.具备对新知识、新技能的学习能力和创新创业能力; 2.具备正确使用助航设备进行船舶定位、导航、操纵与避碰的能力; 3.具备制定符合船舶实际情况的货物积载与系固方案并进行货物管理和装卸作业的能力; 4.具备船舶救生设备和船舶消防器材日常维护与保养的能力; 5.具备船舶无线电通信设备(GMDSS)的操作和维护保养能力; 6.掌握国际、国内相关的法律法规; 7.掌握航海英语和通信英语的专业词汇和用语,能用英语进行交流和沟通。
核心课程与实习实训 1.核心课程 船舶定位与导航、航海气象观测与分析、航海仪器操作与维护、船舶操纵与避碰、船舶结构与货运、航海英语、船舶管理、GMDSS 设备与操作等。 2.实习实训 在校内进行海员基本安全、高级消防、精通急救、精通救生艇筏和救助筏、航海仪器正确使用、航线设计、船舶操纵、避碰与驾驶台资源管理、货物积载与系固、航海英语听力与会话、通信英语听力与会话、GMDSS 设备操作等实训。 在海运企业、港航企业、海事机构进行实习。 职业资格证书举例 船舶三副适任证书 衔接中职专业举例 船舶驾驶船舶水手与机工 接续本科专业举例 航海技术
1. GPS接收机显示的卫星数据主要有:(D) A. 卫星编号 B. 卫星仰角(A) A. 34.4 B. 0.03 C. HDOP D. 以上都是 2. GPS接收机的HDO设定值小于定位的接收机显示的船位是----船位。(B) A. GPS解算 B. GPS推算 C. 错误的 C. 10.32. D. 7.2 9. 在GPS卫星导航仪冷启动时,所输入的世界时误差不大于--- 。(B) A. 10 B. 15 C. 20 D. 上次定位 3. GPS定位的海图标绘误差,除了与海图比例尺大小和标绘技能有关外,还与下列哪种因素有关? (B) A. 位置线交角 B. 海图测地系与GPS测地系是否相同 C. 船与卫星的相对位置 D. HDOP值的设定 4. GPS接收机初次开机时需----后,方能预报卫星在各地的覆盖情况,以便进行最佳卫星配置的选择。 (C) A. 15 min B. 25 min C. 12.5 min D. 15.5 min 5. 卫星信号的覆盖面积主要取决于:----。(C) A. 发射功率 B. 卫星天线高度 C. 轨道高度 D. 地面接收站的高度 6. GPS接收机中,HDOP!什么含义? (B) A. 水平方向精度几何因子,越大越好 B. 水平方向精度几何因子,越小越好 C. 水平方向误差系数,越大越好 D. 水平方向误差系数,越小越好 7. 由于GPS接收机测得的卫星信号的传播延时不是真正的传播延时,所以由此算出的距离称为:-----。(D) A. 初次距离 B. 粗测距离 C. 真距离 D. 伪距离 8. GPS导航仪等效测距误差为8.6米(CA码),GPS 导航仪显示TDOP = 1.2,其时间误差为-----纳秒。 10. GPS卫星导航仪采用---。(C) A. 码片搜索方式搜索GPS卫星信号 B. 频率搜索方式搜索GPS卫星信号 C. A+B D. A、B均不对 11. GPS卫星导航仪在定位过程中根据---识别各颗GPS卫星。(A) A. 伪码 B. 频率 C. 莫尔斯码呼号 D. 时间频率 12. GPS卫星导航系统共设置颗GPS卫星,分布在----个轨道上。(C) A. 21+3 , 8 B. 18+3 , 6 C. 21+3 , 6 D. 18+3 , 8 13. 在GPS卫星导航系统中,卫星的轨道高度为 ---。(C) A. 1948千米 B. 1946千米 C. 20200 千米. D. 19100 千米 14. 通常,商船上使用码的GPS卫星导航仪定位与导航,其码率为---。(D) A. P , 10. 23 兆赫 HDO值时, D.30
题卡1 1.请正确读取航向 2.假设测试时间为2000年3月21日ZT=0600 δ=31°30′.0 N λ =121°30′.O E。 测太阳真出罗方位CB092°.0。求△C 因为3月21 日是春分点,赤纬等于0;方位角等于90度,太阳出正东没正西做周日视运动。所以太阳真出方位等于90度。所以罗经△C=TB-CB=90°-92°=-2°. 3.安许茨系列陀螺罗经开机前的检查与准备工作。 a)船电,变压器箱,随动开关-断开(安许茨特有的随动开关) b)主罗经各部分是否正常 保险丝完好,机械传动应灵活,导线接头应接触良好,对地接触良好。 c)各分罗经及船向记录器与主罗经匹配。 d)航向记录器中时标与船时一致,打印纸是否够用。 4.雷达选择物标的基本要求有那些 回波稳定,亮而清晰 孤立容易辨认,近而可靠 交角好的2-3个物标 海图上物质确定的物标 5.GPS开机并调整亮度 6.测深仪开机及深度的读取
7.请在AIS上输入一下数据:本货轮吃水7.8M,船员22名,在航状 态,预计下月10日到达日本神户港(KOBE) 题卡2 1.磁罗经的主要部件的位置及作用 罗经柜:(非磁性材料)支撑罗盘;安装校正器。 罗经盘:指示航向。 垂直磁棒:校正倾斜自差。 水平(横向;纵向)磁棒:校正半圆自差。 软铁片:校正象限自差 2.假设测试时间为2000年9月23日ZT=0600 δ=30°30′.0 N λ=121°30′.O E。 测太阳真没罗方位CB272°.0。求△C 因为9月23日是秋分点,赤纬等于0度,方位角等于270度; 太阳出正东没正西做周日视运动。所以太阳方位角等于270度。 所以罗经差△C=TB-CB=270°-272°=-2° 3. 安许茨关机 关随动开关,变压器箱开关,船电开关 4.雷达开机 船电开关→直流电源→面板开关→亮度→(3分钟后)发射开关→增益→调谐 5.在GPS上设置转向点:先清除所以转向点数据,设置1,35000′ 0N; 121015′0E
1.GPS接收机显示的卫星数据主要有: (D) A. 卫星编号 B. 卫星仰角 C. HDOP D. 以上都是 2. GPS接收机的HDOP设定值小于定位的HDOP值时,接收机显示的船位是----船位。 (B) A. GPS解算 B. GPS推算 C. 错误的 D. 上次定位 3. GPS定位的海图标绘误差,除了与海图比例尺大小和标绘技能有关外,还与下列哪种因素有关?(B) A. 位置线交角 B. 海图测地系与GPS测地系是否相同 C. 船与卫星的相对位置 D. HDOP值的设定 4. GPS接收机初次开机时需----后,方能预报卫星在各地的覆盖情况,以便进行最佳卫星配置的选择。 (C) A. 15 min B. 25 min C. 12.5 min D. 15.5 min 5. 卫星信号的覆盖面积主要取决于:----。 (C) A. 发射功率 B. 卫星天线高度 C. 轨道高度 D. 地面接收站的高度 6. GPS接收机中,HDOP是什么含义? (B) A. 水平方向精度几何因子,越大越好 B. 水平方向精度几何因子,越小越好 C. 水平方向误差系数,越大越好 D. 水平方向误差系数,越小越好 7. 由于GPS接收机测得的卫星信号的传播延时不是真正的传播延时,所以由此算出的距离称为: -----。 (D) A. 初次距离 B. 粗测距离 C. 真距离 D. 伪距离 8. GPS导航仪等效测距误差为8.6米(CA码),GPS 导航仪显示TDOP = 1.2,其时间误差为-----纳秒。(A) A. 34.4 B. 0.03 C.10.32. D. 7.2 9. 在GPS卫星导航仪冷启动时,所输入的世界时误差不大于-----。 (B) A.10 B.15 C.20 D.30 10. GPS卫星导航仪采用---。(C) A. 码片搜索方式搜索GPS卫星信号 B. 频率搜索方式搜索GPS卫星信号 C. A+B D. A、B均不对 11. GPS卫星导航仪在定位过程中根据---识别各颗GPS卫星。 (A) A. 伪码 B. 频率 C. 莫尔斯码呼号 D. 时间频率 12. GPS卫星导航系统共设置颗GPS卫星,分布在----个轨道上。 (C) A. 21+3,8 B. 18+3,6 C. 21+3,6 D. 18+3,8 13. 在GPS卫星导航系统中,卫星的轨道高度为---。 (C) A. 1948千米 B. 1946千米 C. 20200千米. D. 19100千米 14. 通常,商船上使用码的GPS卫星导航仪定位与导航,其码率为---。 (D) A. P,10.23兆赫 B. P,1.023兆赫 C. C A,10.23兆赫 D. CA,1.023兆赫 15. GPS卫星导航系统发射信号的频率是-----。 (A) A. 1575.42兆赫,1227.60兆赫 B. 399.968兆赫,149.988兆赫
大学计算机基础思考题 1.在计算机运行过程中,五大部件是如何协调工作的?P10 当控制器要执行指令时,先向内存发出地址码,从指定的内存单元中读取要执行的指令送入控制器,进行译码和分析;根据指令的功能,再将操作控制信号发送到相关的部件(输入设备、运算器或输出设备) 当输入设备输入数据(程序、命令)时,先由输入设备组织数据,当一个数据准备完毕时,向控制器提出输入请求。当控制器执行到输入命令时,根据指令中的内存地址,将接收到的数据或程序存储到内存中。当输入设备空闲(就绪)或忙于输入数据是,将相应的状态反馈给控制器。 当运算器接收到运算指令时,先根据指令中的内存地址取出操作数,然后进行运算,最后再根据指令中的目标内存地址保存运算结果。在运算过程中,将运算器的某些状态信息(如运算正常完成、产生进位或溢出等)反馈给控制器,为进一步的操作提供参考依据。 当输出设备空闲(就绪)时,先向控制器发出输出请求,随后等待控制器发布输出指令,当控制器执行到输出指令时,根据指令中的内存地址取出数据发送给输出设备。当输出设备正忙于输出数据或发生故障时,将相应的状态反馈给控制器,以便控制器作进一步处理。 2.计算机哪些是串行接口,哪些是并行接口?串行:RS—232,USB接口,IEEE1394接口SATA接口并行:LPT/Parallel,IDE接口 3.BIOS与CMOS的作用及关联是什么? BIOS作用:(1)自检测程序(2)系统启动自举程序(3)系统设置程序(4)中
断例程 CMOS:用于保存用户通过BIOS系统设置程序配置的系统日期及时间、开机密码和某些硬件参数等信息。 BIOS中有系统设置程序即CMOS设置程序,其中的一些信息保存在CMOS中4.主板上北桥芯片和南桥芯片各自作用是什么? 北桥:提高通信性能,协助CPU对内存储器、显示器、PCI插槽等进行管理 南桥:主要协助CPU对键盘控制器、USB、磁盘驱动器和电源管理器等进行管理 5.多道批处理系统和分时系统有哪些异同点? 多道批处理系统和分时系统都是宏观上同时执行多个程序。在多道批处理系统中,一个程序一旦得到CPU,在执行I/O操作或程序结束之前一直占用CPU,没有时间限制;而在分时系统中,除了I/O操作或程序结束时释放CPU外还有时间片的限制 6.OSI参考模型与TCP/IP体系结构有哪些异同点? TCP/IP中网络接口层对应OSI模型中的物理层和数据链路层,应用层对应OSI 模型中的应用层,表示层,会话层。而且TCP/IP体系中网络层核心是网际协议,应用层有协议。OSI模型中,通信协议在应用层 7.顺序存储结构和链式存储结构各自的优缺点是什么? 顺序存储结构的优点是每个节点占用存储空间最少;缺点是当数据元素很多时,可能找不到一块足够大的连续存储单元,不能很好地利用空闲存储单元,容易产生碎片。链式存储结构优点是充分利用空闲存储单元;缺点是需要保存每个节点的指针,占用较多的存储单元
2020航海技术专业大学排名一览表 航海技术专业培养具备海洋船舶驾驶、船舶运输管理等方面知识,能在海洋运输各企事业单位从事海洋船舶驾驶和营运管理工作,符合国际和国家海船船员适任标准要求的高级航海技术人才。一起来了解一下航海技术专业大学排名吧! 航海技术专业 排名 高校名称 开此专业学校数 1大连海事大学182上海海事大学183集美大学184武汉理工大学185重庆交通大学186广州航海学院187宁波大学188浙江海洋大学189天津理工大学18 培养要求 本专业学生主要从事现代海洋船舶驾驶、船舶运输管理的基本理论和基本知识,受到船舶操纵、船舶避碰和值班、识别和运用各种航图、导航仪器仪表和GMDSS通信方面的基本训练,还需接受高级消防、精通急救等一些高级船员必备的能力培养。具有独立指挥和组织船舶航行的初步能力。 知识技能
毕业生应获得以下几方面的知识和能力: 1.掌握船舶的货物运输、运营管理、海商法与远洋运输业务等方面的基础知识; 2.掌握船舶及其设备的使用、保养等基本技术; 3.具有设计航线、组织船舶航行和操作GMDSS通信设备的初步能力; 4.熟悉航海和海商法的有关法律法规; 5.了解航海和海商的发展动态; 6.掌握文献检索、资料查询的基本方法,具有初步的科学研究和实际工作能力。 课程设置 主干学科:交通运输工程 主要课程:航海学、航海英语、船舶操纵与避碰航、船舶管理、海气象与海洋学、船舶结构与货运、航海仪器、船舶无线电技术基础、海洋船舶驾驶、海商法、船舶原理、船舶自动化基础、GMDSS认识与操作 主要实践性教学环节:包括GMDSS、罗经、雷达、GPS、AIS 操作训练,船舶驾驶实习等。xuewei
航海仪器课后复习题 第一章陀螺罗经 1.叙述陀螺仪的定义及其基本特性。 定义:工程上将高速旋转的对称刚体(转子)及其悬挂装置的总称叫做陀螺仪。基本特性:定轴性进动性 2.何谓平衡陀螺仪和自由陀螺仪? 平衡陀螺仪:陀螺仪的中心和其几何中心相重合的陀螺仪。 自由陀螺仪:不受任何外力矩作用的平衡陀螺仪。 4.位于地球上的自由陀螺仪的视运动有何规律?如何解释其物理实质? 自由陀螺仪在地球上的视运动规律: 北纬东偏南纬西偏,(偏转角速度为w2)东升西降南北一样(升降角速度为w1a) 物理实质:当地球自转时,在北纬子午面北点N向西偏转,由于陀螺仪的定轴性,主轴空间指向不变,跟地球一起运动的观察者看到主轴北端在不断向东偏转。同理在南纬,主轴指北端向西偏转。当陀螺仪主轴指北端偏离子午面以东时,受w1的影响,水平面东半平面下降,陀螺仪主轴的指北端相对水平面产生上升的视运动;当陀螺仪主轴的指北端偏离子午面以西时,由于水平面西半平面上升,陀螺仪主轴则产生下降视运动。 5.影响自由陀螺仪主轴不能稳定指北的主要矛盾是什么?克服该主要矛盾对自由陀螺仪影响的基本原则是什么? W2是影响自由陀螺仪主轴不能指北的主要矛盾。克服该矛盾对自由陀螺仪影响的基本原则是利用陀螺仪的进动性,对陀螺仪水平轴施加一个外力M,使陀螺仪周周绕OZ轴进动,并满足w’=M/H=w2 6.叙述变自由陀螺仪为摆式罗经的两种方法。 第一种是重力下移法。将陀螺仪的重心沿垂直轴下移,时重心不与支架中心O 重合,当主轴不水平时,产生控制力矩。根据这种方法制成的罗经称为下重式罗经。 第二种是水银器法或液体连通器法。在平衡陀螺仪上悬挂液体连通器,液体连通器中注入适量的高比重液体(如水银或其他化学溶剂),用以产生控制力矩。这类罗经一般被称为水银器罗经或称液体连通器罗经。 7.为何双转子摆式罗经与液体连通器罗经二者的动量矩H的指向不同? 由于地球自转,双转子摆式罗经主轴指北端偏离水平面后产生的重力控制力矩My使陀螺仪主轴指北端向子午面北端靠拢,自动找北。而液体连通器罗经随地球自转产生的控制力矩和双转子摆式罗经产生的控制力矩方向相反,要实现与双转子罗经同样的自动找北功能,只有两者动量矩H指向相反。
大学计算机基础模拟题 一、单选题 1、完整的计算机系统由(C)组成。 A、运算器、控制器、存储器、输入设备和输出设备 B、主机和外部设备 C、硬件系统和软件系统 D、主机箱、显示器、键盘、鼠标、打印机 2、以下软件中,(D)不是操作系统软件。 A、Windowsxp B、unix C、linux D、microsoft office 3、用一个字节最多能编出(D)不同的码。 A. 8个 B. 16个 C. 128个 D. 256个 4、任何程序都必须加载到(C)中才能被CPU执行。 A. 磁盘 B. 硬盘 C. 内存 D. 外存 5、下列设备中,属于输出设备的是(A)。 A、显示器 B、键盘 C、鼠标 D、手字板 6、计算机信息计量单位中的K代表(B)。 A. 102 B. 210 C. 103 D. 28 7、RAM代表的是(C)。
A. 只读存储器 B. 高速缓存器 C. 随机存储器 D. 软盘存储器 8、组成计算机的CPU的两大部件是(A)。 A、运算器和控制器 B. 控制器和寄存器 C、运算器和内存 D. 控制器和内存 9、在描述信息传输中bps表示的是(D)。 A、每秒传输的字节数 B、每秒传输的指令数 C、每秒传输的字数 D、每秒传输的位数 10、微型计算机的内存容量主要指(A )的容量。 A.RAM B.ROM C.CMOS D.Cache 11、十进制数27对应的二进制数为( D )。 A.1011 B. 1100 C. 10111 D. 11011 12、Windows的目录结构采用的是(A)。 A、树形结构 B、线形结构 C、层次结构 D、网状结构 13、将回收站中的文件还原时,被还原的文件将回到(D)。 A、桌面上 B、“我的文档”中 C、内存中 D、被删除的位置
1.根据DGPS卫星导航系统的作用距离及定位精度分析,可以看出DGPS卫星导航仪主要为船舶在___ 提供定位和导航。 (89737:第07章航海仪器:280> A.江河、湖泊 B.狭窄水道、港口及近海 C.远洋 D.A+B 2.RTCM104专业委员会推荐使用______ 。 (89741:第07章航海仪器:281> A.低频频率 B.无线电信标频率 C.甚高频频率 D.高频频率 在DGPS中,按照覆盖区域的从小到大的排序为_____。 (89743:第07章航海仪器:282> 3. A.广域差分GPS、广域增强系统、局域差分GPS B.局域差分GPS、广域差分GPS、广域增强系统 C.广域差分GPS、局域差分GPS、广域增强系统 D.广域增强系统、广域差分GPS、局域差分GPS b5E2RGbCAP 差分GPS基准台由______组成。 (89748:第07章航海仪器:283> 4. A.注入站、通信站与协调站 B.接收机部分、数据处理部分与发射机部分 C.跟踪站、注入站与协调站 D.注入站、主控站与跟踪站p1EanqFDPw 通常,航海所使用的DGPS无线电信标台设在_____。 (89753:第07章航海仪器:284> 5. A.GPS卫星上 B.A + C C.DGPS卫星导航仪所在的船上 D.沿海岸边或岛屿海岸边缘处DXDiTa9E3d 通常,商船上使用_____ 码的GPS卫星导航仪定位与导航,其码率为:_____。 (89762:第07章航6. 海仪器:286> A.P;10.23MHz B.P;1.023MHz C.CA;10.23MHz D.CA;1.023MHz RTCrpUDGiT 利用GPS卫星导航仪定位,在地平线7.5°以上,至少可以看见_____颗卫星。 (89766:第07章航7. 海仪器:287> A.3 B.4 C.5 D.6 5PCzVD7HxA 1 / 75 GPS卫星导航系统所发射的信号频率是______。 (89775:第07章航海仪器:289> 8. A.1575.42MHz B.1602MHz C.1246MHz
大学计算机基础课后习题答案 习题1及参考答案 1.选择题 (1)计算机中所有信息都采用的存储方式是( A ) A. 二进制 B. 十进制 C. 十六进制 D. ASCII码 (2)根据冯.诺伊曼的“存储程序”原理,“存储程序”是指(B ) A. 事先编好程序 B. 把程序存储在计算机内存中 D. 将程序从磁盘中自动读出并逐条执行 C. 把程序保存在磁盘中 ( B ) A.科学计算 B.数据处理 C.辅助工程 D.人工智能 (4)在计算机应用中,“计算机辅助设计”的英文缩写为(A ) A. CAD B. CAM C. CAE D. CAT (5)用MIPS来衡量的计算机性能指标是( D ) A. 传输速率 B. 存储容量 C. 字长 D. 运算速度(3)利用计算机进行科技情报检索是计算机的一项应用,按计算机应用的分类它属于 2.填空题 (1)世界上公认的第一台电子计算机产生于( 1946 )年,名字叫( ENIAC )。(2)电子商务企业与(企业)之间(即B to B)、企业与(消费者)(即B to C)之间提供了一种新型的商务活动模式。 (3)计算机网络化的目的主要是实现网络中的计算机之间(共享资源)、(交换信息)和协同工作。 (4)从目前计算机的研究情况可以看到,未来计算机将有可能在(光子)计算机、(生物)计算机、(量子)计算机等方面的研究领域上取得重大的突破。(5)以冯.诺伊曼思想为基础的计算机系统结构都是由(运算器)、(控制器)、(存储器)、输入设备和输出设备五大部分构成。 3.简答题(略) (1)简述计算机的主要特点是什么? 答:1.运算速度快2.计算精度高3.具有强大的记忆功能4.具有逻辑判断能力5.能实现自动控制 (2)现代计算机的发展经历了哪几个时代? 答:第一代电子管第二代晶体管第三代中、小规模集成电路第四代大规模和超大规模集成电路(3)计算机的发展方向是什么? 答:(1)巨型化(2)微型化(3)网络化(4)智能化 未来计算机将有可能在光子计算机、生物计算机、量子计算机等方面的研究领域上取得重大的突破。
一、选择题1._____________是现代通用计算机的雏形。 A.宾州大学于1946年2月研制成功的E N I A C B.查尔斯巴贝奇于1834年设计的分析机C.冯诺依曼和他的同事们研制的E D V A C D.艾伦图灵建立的图灵机模型2.计算机科学的奠基人是_____________。 A.查尔斯巴贝奇B.图灵C.阿塔诺索夫D.冯,诺依曼3.物理器件采用晶体管的计算机被称为_____________。 A.第一代计算机B.第二代计算机C.第三代计算机D.第四代计算机4.目前,被人们称为3C的技术是指_____________。 A.通信技术、计算机技术和控制技术 B.微电子技术、通信技术和计算机技术C.微电子技术、光电子技术和计算机技术D.信息基础技术、信息系统技术和信息应用技术5.下列不属于信息系统技术的是_____________。 A.现代信息存储技术B.信息传输技术 C.信息获取技术D.微电子技术6.在下列关于信息技术的说法中,错误的是_____________。 A.微电子技术是信息技术的基础B.计算机技术是现代信息技术的核心C.光电子技术是继微电子技术之后近30年来迅猛发展的综合性高新技术D.信息传输技术主要是指计算机技术和网络技术
7.在电子商务中,企业与消费者之间的交易称为_____________。 A.B2B B.B2C C.C2C D.C2 B 8.计算机最早的应用领域是_____________。 A.科学计算B.数据处理C.过程控制D.CAD/CAM/CIMS 9.计算机辅助制造的简称是_____________。 A.C A D B.C A M C.C A E D.C B E 10.C B E是目前发展迅速的应用领域之一,其含义是_____________。 A.计算机辅助设计B.计算机辅助教育 C.计算机辅助工程D.计算机辅助制造 11.第一款商用计算机是_____________计算机。 A.E N I A C B.E D V A C C.M A R K I D.U N I V A C 二、填充题 1.图灵在计算机科学方面的主要贡献是建立图灵机模型和提出了_____________ 。 2.最近的研究表明,电子计算机的雏形应该是由阿塔诺索夫和他的研究生在1941年 制作成功的_____________计算机。 3.以“存储程序”的概念为基础的各类计算机统称为_____________。 4.第一款商用计算机是1951年开始生产的_____________计算机。 5.第一代电子计算机采用的物理器件是_____________。 6.大规模集成电路的英文简称是_____________。 7.未来计算机将朝着微型化、巨型化、_____________和智能化方向发展。 8.根据用途及其使用的范围,计算机可以分为_____________和专用机。 9.微型计算机的种类很多,主要分成台式机、笔记本电脑和_____________。 10.未来新型计算机系统有光计算机、生物计算机和_____________。 11.人类生存和社会发展的三大基本资源是物质、能源和_____________ 。 12._____________是现代电子信息技术的直接基础。
第一章船上职务 第一节基本职责 1.根据船员职务规则规定,下列有关三副的基本职责的叙述哪项不正确________。 A.航行中每日正午与机舱对时并填写正午报告 B.主管救生、消防设备 C.定期更换救生艇的淡水和备品D.保持全船各种救生信号有效期(不包括驾驶台的有关救生信号) A 2.下列有关二副基本职责的叙述哪项不正确________。 A.主管驾驶导航设备 B.停泊时,主持安排驾驶员值班表,报大副批准后执行 C.负责管理天文钟和船钟 D.协助三副保持驾驶台救生信号和器材的有效期 D 3.下列哪些是二副的基本职责________。 Ⅰ.船舶坞修期间应会同船长、轮机长检查船体的水下部分及舵叶;Ⅱ.停泊时,主持安排驾驶员值班表,报大副批准后执行;Ⅲ.负责管理天文钟和船钟;Ⅳ.管理国旗、信号旗、号灯、号型。 A.Ⅰ~Ⅳ B.Ⅰ~Ⅲ C.Ⅱ~Ⅳ D.Ⅰ、Ⅱ、Ⅳ C 4.下列有关二副的基本职责的叙述哪项不正确________。A.及时登记、改正航行通告和警告 B.每航次结束后及时填写航次报告 C.负责管理并保持驾驶台、海图室的整洁 D.航行中每天中午责成三副填写正午报告分送船长和轮机长 D 5.下列哪些是二副的基本职责________。 Ⅰ.负责航海图书资料、航行通告和警告的管理、改正和请领;Ⅱ.停泊时,主持安排驾驶员值班表报大副批准后执行;Ⅲ.管理并负责各种航海仪器、气象仪表的正确使用和养护;Ⅳ.进出港口、靠离码头、移泊时在船尾指挥。A.Ⅰ~Ⅲ B.Ⅱ~Ⅳ C.Ⅰ~Ⅳ D.Ⅰ、Ⅱ、Ⅳ C 6.二副有责在驾驶台张贴 ________。 Ⅰ.驾驶台规则;Ⅱ.驾驶台与 机舱联系制度;Ⅲ.各种主要仪 器操作说明及其误差曲线图; Ⅳ.船舶防火控制图。 A.Ⅰ~Ⅳ B.Ⅰ~Ⅲ C.Ⅱ~Ⅳ D.Ⅰ、Ⅱ、Ⅳ B 7.有关二副的基本职责下列哪 些是正确的________。 Ⅰ.主管航海仪器和航海图书资 料;Ⅱ.协助船长做好航次计划; Ⅲ.主管货物装卸;Ⅳ.开航前 备妥需用的航海图书资料。 A.Ⅰ~Ⅳ B.Ⅰ、Ⅱ、Ⅳ C.Ⅰ~Ⅲ D.Ⅱ~Ⅳ B 8.有关二副的基本职责下列哪 项不正确________。 A.主管货物装卸 B.主管航海仪器和航海图书资料 C.协助船长做好航次计划 D.开航前备妥需用的航海图书资 料 A 9.二副的基本职责包括 ________。 Ⅰ.张贴驾驶台规则;Ⅱ.张贴 驾驶、轮机联系制度;Ⅲ.张贴 重要仪器设备的操作说明;Ⅳ.张 贴救生艇起落操作规程。 A.Ⅰ~Ⅳ B.Ⅰ、Ⅱ、Ⅳ C.Ⅰ~Ⅲ D.Ⅱ~Ⅳ C 10.二副的基本职责包括 ________。 Ⅰ.负责管理邮件的存放、装卸 和交接工作;Ⅱ.按时向大副提 出所管仪器设备的修理项目; Ⅲ.按时校正船钟,航行中跨时 区负责拨钟;Ⅳ.定期养护操舵 仪。 A.Ⅰ~Ⅳ B.Ⅰ~Ⅲ C.Ⅱ~Ⅳ D.Ⅰ、Ⅱ、Ⅳ C 11.三副的基本职责包括 ________。 Ⅰ.按大副的意图编排船舶应变 部署表;Ⅱ.主管救生、消防设 备;Ⅲ.负责向新来船员介绍应 变岗位和具体职责;Ⅳ.保持全 船(包括驾驶台)各种救生信号 的有效期。 A.Ⅰ~Ⅲ B.Ⅰ~Ⅳ C.Ⅰ、Ⅲ、Ⅳ D.Ⅱ、Ⅲ、Ⅳ A 12.根据职务规则,三副的基本 职责包括________。 Ⅰ.按船长指示管理货物装卸; Ⅱ.主管救生、消防设备;Ⅲ.定 期对救生艇筏进行检查保养; Ⅳ.保持所有救生信号的有效期。 A.Ⅰ~Ⅳ B.Ⅱ~Ⅳ C.Ⅰ、Ⅳ D.Ⅱ、Ⅲ D 13.三副的基本职责是 ________。 Ⅰ.管理CO2间;Ⅱ.靠、离、 移泊时在驾驶台当值;Ⅲ.停泊 时编排驾驶员值班表;Ⅳ.保持 全船各种救生信号的有效期(不 包括驾驶台的救生信号)。 A.Ⅰ~Ⅲ B.Ⅰ~Ⅳ C.Ⅱ、Ⅲ、Ⅳ D.Ⅰ、Ⅱ、Ⅳ D 14.船员职务规则规定,三副的 基本职责应包括________。 Ⅰ.负责配置救生衣,发现损坏 及时修复、更新;Ⅱ.管理全船 火警报警系统;Ⅲ.按时向大副 提出所管设备的保养计划;Ⅳ.负 责制定救生艇起落操作规程。 A.Ⅰ~Ⅳ B.Ⅰ~Ⅲ C.Ⅰ、Ⅱ、Ⅳ D.Ⅱ、Ⅲ、Ⅳ B 15.除正常航行值班外,三副在 哪些情况下应在驾驶台当值 ________。 Ⅰ.进出港时;Ⅱ.靠离码头时; Ⅲ.移泊时;Ⅳ.替换大副用餐 时。 A.Ⅰ~Ⅳ 《船舶管理习题集》2008---mst 第1页