伦茨9323伺服驱动器故障维修实例
作者:唐寅喜
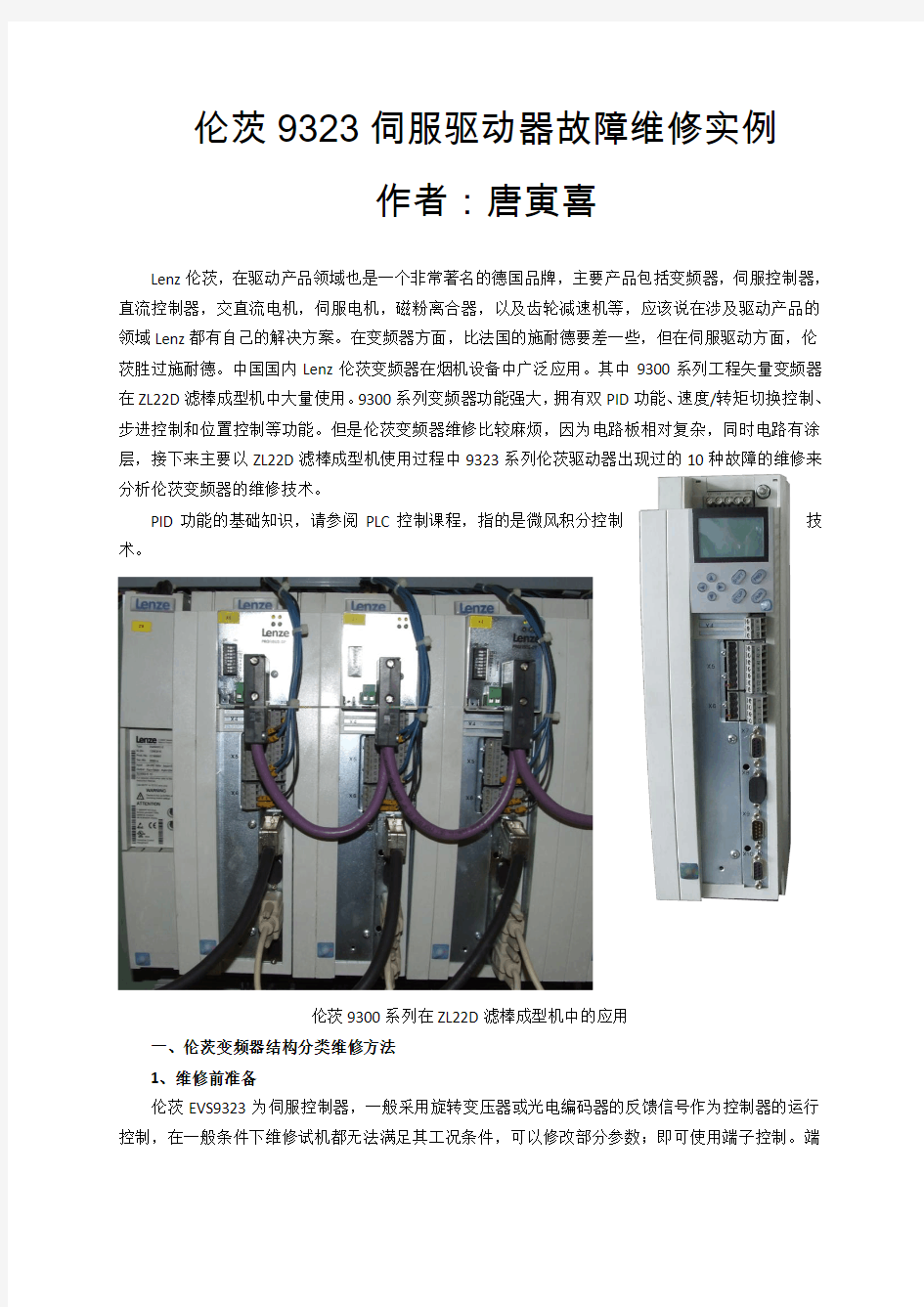
Lenz伦茨,在驱动产品领域也是一个非常著名的德国品牌,主要产品包括变频器,伺服控制器,直流控制器,交直流电机,伺服电机,磁粉离合器,以及齿轮减速机等,应该说在涉及驱动产品的领域Lenz都有自己的解决方案。在变频器方面,比法国的施耐德要差一些,但在伺服驱动方面,伦茨胜过施耐德。中国国内Lenz伦茨变频器在烟机设备中广泛应用。其中9300系列工程矢量变频器在ZL22D滤棒成型机中大量使用。9300系列变频器功能强大,拥有双PID功能、速度/转矩切换控制、步进控制和位置控制等功能。但是伦茨变频器维修比较麻烦,因为电路板相对复杂,同时电路有涂层,接下来主要以ZL22D滤棒成型机使用过程中9323系列伦茨驱动器出现过的10种故障的维修来
分析伦茨变频器的维修技术。
PID功能的基础知识,请参阅PLC控制课程,指的是微风积分控制技术。
伦茨9300系列在ZL22D滤棒成型机中的应用
一、伦茨变频器结构分类维修方法
1、维修前准备
伦茨EVS9323为伺服控制器,一般采用旋转变压器或光电编码器的反馈信号作为控制器的运行控制,在一般条件下维修试机都无法满足其工况条件,可以修改部分参数;即可使用端子控制。端
伺服驱动器维修篇1:伺服驱动器维修常见故障总结 伺服驱动器维修常见故障总结分析如下:1、伺服电机高速旋转时出现电机偏差计数器溢出错误,如何处理① 高速旋转时发生电机偏差计数器溢出错误;对策检查电机动力电缆和编码器电缆的配线是否正确,电缆是否有破损。② 输入较长指令脉冲时发生电机偏差计数器溢出错误;对策 a.增益设置太大,重新手动调整增益或使用自动调整增益功能; b.延长加减速时间; c.负载过重,需要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负荷能力。③ 运行过程中发生电机偏差计数器溢出错误。对策 a.增大偏差计数器溢出水平设定值; b.减慢旋转速度; c.延长加减速时间; d.负载过重,需要重新选定更大容量的电机或减轻负载,加装减速机等传动机构提高负载能力。2、伺服电机在有脉冲输出时不运转,如何处理 ①监视控制器的脉冲输出当前值以及脉冲输出灯是否闪烁,确认指令脉冲已经执行并已经正常输出脉冲; ② 检查控制器到驱动器的控制电缆,动力电缆,编码器电缆是否配线错误,破损或者接触不良; ③检查带制动器的伺服电机其制动器是否已经打开; ④ 监视伺服驱动器的面板确认脉冲指令是否输入; ⑤ Run运行指令正常; ⑥控制模式务必选择位置控制模式; ⑦ 伺服驱动器设置的输入脉冲类型和指令脉冲的设置是否一致; ⑧ 确保正转侧驱动禁止,反转侧驱动禁止信号以及偏差计数器复位信号没有被输入,脱开负载并且空载运行正常,检查机械系统。3、伺服电机没有带负载报过载,如何处理 ① 如果是伺服Run(运行)信号一接入并且没有发脉冲的情况下发生 a.检查伺服电机动力电缆配线,检查是否有接触不良或电缆破损; b.如果是带制动器的伺服电机则务必将制动器打开; c.速度回路增益是否设置过大; d.速度回路的积分时间常数是否设置过小。② 如果伺服只是在运行过程中发生 a.位置回路增益是否设置过大; b.定位完成幅值是否设置过小; c.检查伺服电机轴上没有堵转,并重新调整机械。4、伺服电机运行时出现异常声音或抖动现象,如何处理 ①
伺服驱动器怎样维修_伺服驱动器维修技巧 伺服驱动器的特点1、伺服驱动器软件程序主要包括主程序、中断服务程序、数据交换程序。 2、伺服驱动器主程序主要用来完成系统的初始化、LO接口控制信号、DSP内各个控制模块寄存器的设置等。 3、伺服驱动器所有的初始化工作完成后,主程序才进入等待状态,以及等待中断的发生,以便电流环与速度环的调节。 4、伺服驱动器所有的初始化工作完成后,主程序才进入等待状态,以及等待中断的发生,以便电流环与速度环的调节。 5、伺服驱动器初始化主要包括DsP内核的初始化、电流环与速度环周期设定、PWM初始化、四M启动、ADc初始化与启动、QEP初始化、矢量与永磁同步电机转子的初始位置初始化、多次伺服电机相电流采样、求出相电流的零偏移量、电流与速度P调节初始化等。 6、PWM定时中断程序有的用来对霍尔电流传感器采样A、B两相电流ia、ib进行采样、定标,以及根据磁场定向控制原理,计算转子磁场定向角,再角,再生成PWM信号对位置环与速度环进行控制。 7、功率驱动保护中断程序主要用于检测智能功率模块的故障输出。 8、光电编码器零脉冲捕获中断程序可实现对编码器反馈零脉冲精确确地捕获,从而可以得到交流永磁同步电机矢量变换定向角度的修正值。 9、数据交换程序主要包括与上位机的通信程序、EEPRoM参的读取、数码管显示程序等。参数的存储控制器键盘值。 伺服驱动器控制方式1、反馈补偿型开环控制开环系统的精度较低,这是由于伺服驱动器的步距误差、起停误差、机械系统的误差都会直接影响到定位精度。应采用补偿型进行改进,这种系统且有开环与闭环两者的优点,即具有开环的稳定性和闭环的精确性。不会因
FANUC 数控交流伺服驱动系统故障维修 1、FANUC 6M数控开机出现剧烈振动的故障维修 故障现象:一台配套FANUC 6M的加工中心,在机床搬迁后,首次开机时,机床出现剧烈振动,CRT显示401、430报警。 分析与处理过程:FANUC 6M数控系统CRT上显示401报警的含义是“X、Y、Z等进给轴驱动器的速度控制准备信号(VRDY信号OFF状态,即:速度控制单元没有准备好”;ALM430报警的含义是“停止时Z轴的位置跟随误差超过”。 根据以上故障现象,考虑到机床搬迁前工作正常,可以认为机床的剧烈振动,是引起X、Y、Z等进给轴驱动器的速度控制准备信号(VRDY信号)为“OFF”状态,且Z轴的跟随误差超过的根本原因。 分析机床搬迁前后的最大变化是输入电源发生了改变,因此,电源相序接反的可能性较大。检查电源进线,确认了相序连接错误;更改后,机床恢复正常。 2、FANUC 6ME数控运动失控的故障维修 故障现象:一台配套FANUC 6ME系统的加工中心,由于伺服电动机损伤,在更换了X 轴伺服电动机后,机床一接通电源,X轴电动机即高速转动,CNC发生ALM410报警并停机。 分析与处理过程:机床一接通三磊.X轴电动机即高速转动,CNC发生ALM410报警并停机的故障,在机床厂第一次开机调试时经常遇到,根据维修经验,故障原因通常是由于伺服电动机的电枢或测速反馈极性接反引起的。 考虑到本机床X轴电动机已经进行过维修,实际存在测速发电机极性接反的可能性,维修时将电动机与机械传动系统的连接脱开后(防止电动机冲击对传动系统带来的损伤),直接调换了测速发电机极性,通电后试验.机床恢复正常。 3、FANUC 6ME数控运动失控的故障维修 故障现象:一台配套FANUC 6ME系统、FANUC直流伺服驱动、SIEMENS1HU3076直流伺服电动机的进口加工中心,在机床大修后,机床一接通电源,X轴电动机即高速转动,CNC发生ALM410报警并停机。 分析与处理过程:故障分析处理过程同上,初步判定故障原因通常是由于伺服电动机的电枢或测速反馈极性接反引起的; 考虑到本机床大修时,将X轴电动机进行了重新安装,且SIEMENS lHU3076直流伺服电动机不带测速发电机,伺服电动机的实际转速反馈信号通过对编码器的F/V转换得到,因此故障最大可能的原因是电动机电枢线极性接反。 维修时在电动机与机械传动系统脱开后(防止电动机冲击对传动系统带来的损伤),直接调换了电动机电枢极性,通电后试验,机床恢复正常。
伺服驱动器维修检测以及方法 1、示波器检查驱动器的电流监控输出端时,发现它全为噪声,无法读出; 故障原因:电流监控输出端没有与交流电源相隔离(变压器)。 处理方法:可以用直流电压表检测观察。 2、电机在一个方向上比另一个方向跑得快; (1) 故障原因:无刷电机的相位搞错。 处理方法:检测或查出正确的相位。 (2) 故障原因:在不用于测试时,测试/偏差开关打在测试位置。 处理方法:将测试/偏差开关打在偏差位置。 (3) 故障原因:偏差电位器位置不正确。 处理方法:重新设定。 3、电机失速; (1) 故障原因:速度反馈的极性搞错。 处理方法:可以尝试以下方法。 a. 如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以) b. 如使用测速机,将驱动器上的TACH+和TACH-对调接入。 c. 如使用编码器,将驱动器上的ENC A和ENC B对调接入。 d. 如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。 (2) 故障原因:编码器速度反馈时,编码器电源失电。 处理方法:检查连接5V编码器电源。确保该电源能提供足够的电流。如使用外部电源,确保该电压是对驱动器信号地的。 4、LED灯是绿的,但是电机不动; (1) 故障原因:一个或多个方向的电机禁止动作。 处理方法:检查+INHIBIT 和–INHIBIT 端口。 (2) 故障原因:命令信号不是对驱动器信号地的。 处理方法:将命令信号地和驱动器信号地相连。 5、上电后,驱动器的LED灯不亮; 故障原因:供电电压太低,小于最小电压值要求。 处理方法:检查并提高供电电压。 6、当电机转动时, LED灯闪烁; (1) 故障原因:HALL相位错误。 处理方法:检查电机相位设定开关(60°/120°)是否正确。多数无刷电机都是120°相差。 (2) 故障原因:HALL传感器故障 处理方法:当电机转动时检测Hall A, Hall B, Hall C的电压。电压值应该在5VDC和0之间。 7、LED灯始终保持红色; 故障原因:存在故障。 处理方法:原因: 过压、欠压、短路、过热、驱动器禁止、HALL无效。
伦茨9300系列伦茨伺服驱动器故障代码表 2012-12-21 0:51:27 点击:125 伦茨驱动器故障代码表9300系列 优先显示含义 1 GLOBAL DRIVE INIT 键盘和控制器之间的初始化或通信错误 2 XXX - TRIP 活动行程(C0168/ 1的内容) 3 XXX - MESSAGE 活动消息(C0168/ 1的内容) 4 特别控制器状态: 4 Special controller states: 接通禁止 5 控制器源禁止(C0004的价值是在同一时间显示): STP1 端子X5/28 STP3 键盘或LE COM A/B/LI STP4 InterBus-S or Profibus STP5 系统总线(CAN) STP6 C0040 6 快速停止来源: QSP-term-Ext 在输入MCTRL-QSP的功能块MCTRL的高信号 (出厂设置应用于端子X5/E1和X5/E2的) QSP-C0135 键盘或端子A/B/LI QSP-AIF inter总线-S或ProFi系统总线 QSP-CAN 系统总线(CAN) 7 XXX - WARNING 活跃的警告(C0168/ 1的内容) 8 xxxx C0004的值 显示错误原因解决办法 --- 无错误- - CCr 系统故障强干扰对控制电缆检查控制电缆 CCr System fault 在布线的接地或接地回路确保布线合理 CE0 通讯错误转移过程中的控制指令通过自动化接口X1的错误在牢固的自动化模块和插件,如果有必要,螺栓下来 CE1 通讯错误 过程数据输入 对象CAN_IN_1 CAN_IN_1对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器 增加监控时间,如果有必要根据C0357/ 1 CE2 通讯错误过程数据输入 对象CAN_IN_2 CAN_IN_2 对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器下
伺服控制器的原理和维修 近来有同行朋友探讨伺服器的维修,而大多维修界的前辈们,总把维修伺服器看得很神秘,很高深的样子,对技术是守口如瓶。我想在这里抛砖引玉,探讨伺服器的原理和维修。 我是一个搞工业控制设备维修的,专长是硬件维修。工业设备最初源起欧美,发扬于日本,所以无论理论也好,设计也罢,都绕不开国外这个词。在如今网络,软件,物联网,虚拟现实的今天,很多人对硬件维修人员,大多嗤之以鼻。以为就是个玩玩烙铁的体力活,没多少技术含量,其实硬件维修道路艰险且漫长,需要了解的实在很多。 硬件是工业控制设备中重中之重的课题,是虚实交互的桥梁,没这座桥一切都是空谈,是绕不开的执行工具,硬件质量的好坏,直接关系到处理结果。现在世界上顶级的工控设备生产商,都在向模块化生产靠拢。 什么是模块化呢?简单点说就是:把一个设备分拆为几个部分,每个部份,集成起来生产组合起来。这样的好处是,可尽量控制设备的故障范围,节省维护成本,同时拓展了用途。这点在需要联控的领域优势非常的明显。 很多人进入工业设备维修的领域,都是从修变频器开始的,也有人认为会修变频器就会修所有的工业控制设备,其实,这仅仅是一个开始。
当然,入门级变频器包括了强电/微电电路/反馈取样/本地远程控制等基本功能。通常用在要求运转精度不高的场合,比如供水,调速等场合。但一些精确控制场合就不同了,要知道工业控制的精髓就是,精确控制。没有精确度,纵使外观漂亮大气,吹得如何天花乱坠,你的产品还是低级产品。有精度要求的场合,比如我们常常乘坐的电梯,起重,造纸,冶金,纺织等有严格要求的场合,普通变频器就往往不能胜任了。这时,就要求伺服控制器登场了。 伺服控制器有那么神乎其神吗?也别把那东西想得那么复杂,伺服的基本条件是闭环控制。什么是闭环控制?无非就是和输出马达组合成一个环路,有反馈而已。变频器也有反馈,比如电流传感器就是。伺服的反馈要求更苛刻一些,要求电机每转动一下的位置信息主控制板都要知道。通俗点说就是:快了就慢下来,慢了就加快一点。这个说起来容易做起来难,要知道动态,惯性,负载变化都在瞬息万变,马达那边出了什么幺蛾子,控制器马上就知道,而且要做出对应的处理措施,这并不是一件容易的事。 于是第二个问题就出来了,那就是响应问题。所谓的响应,就如人与人之间的对话,一问一答。马达运行起来那是每分钟几千转的问题,这就是所谓的高速响应。马达的编码器担负起和主控板之间的对话。编码器制造商按要求将编码器演算成脉冲,马达转一圈,很可能编码器就输出了几千个脉冲,这个脉冲以原始位置为起点,每一个脉冲代表一个位置。你也可以这样理解,编码器每圈输出的脉冲越多,定位越准确,误差越小。当然以上说的指示一个概念,实际的软件算法,
FANUC交流速度控制单元有多种规格,早期的交流伺服为模拟式,目前一般都使用数字式伺服,在数控机床中,常用的规格型号有以下几种: 1)与FANUC交流伺服电动机AC0、5、10、20M、20、30、30R等配套的模拟式交流速度控制单元。它是FANUC最早的AC伺服产品,速度控制单元采用正弦波PWM控制,大功率晶体管驱动。在结构形式上,可以分单轴独立型、双轴一体型、三轴一体型三种基本结构。单轴独立型速度控制单元,常用的型号有 A06B-6050-H102/H103/H104/H113等;双轴一体型速度控制单元,常用的型号有A06B-6050-H201/H202/H203等;三轴一体型速度控制单元,常用的型号有A06B-6050-H401/H402/H403/H404等,多与FANUC 11、0A、0B等系统配套使用。 2)与FANUC交流S (L、T)系列伺服电动机配套的S (L、C)系列数字式交流伺服驱动器,它是FANUC中期的AC伺服产品,驱动器采用全数字正弦波PWM控制,IGBT驱动。其中,S系列用量最广,规格最全;L 系列只有单轴型结构,常用的型号有A06B-6058-H001-H007/H102/H103等;C系列有单轴型、双轴型两种结构,常用的单轴型有A06B-6066-H002-H006等规格,常用的双轴型有A06B-6066-H222~H224/H233、H234、H244等规格。 作为常用规格,S系列有单轴型、双轴型、三轴型三种结构,常用的单轴型有 A06B-6058-H001~H007/H023/H025等;常用的双轴型有A06B-6058-H221~H231/H251-H253等规格;常用的三轴型有A06B-6058-H331-H334等规格;多与FANUC 0C、11、15系统配套使用。 3)与FANUC α/αC/αM/αL系列伺服电动机配套的FANUC α系列数字式交流伺服驱动器,它是FANUC 当前常用的AC伺服产品,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。FANUC α系列数字式交流速度控制单元有如下两种基本结构形式: ①各驱动公用电源模块(PSM)、伺服驱动单元(SVM)为模块化安装的结构形式,驱动器可以是单轴型、双轴型与三轴型三种结构。常用的单轴型有A06B-6079-H101~H106等,常用的双轴型有 A06B-6079-H201~H208等规格,常用的三轴型有A06B-6079/6080-H301~H307等规格,多与FANUC 0C、15A/B、16A/B、18A、20、21系统配套使用。 ②电源与驱动器一体化(SVU型)的结构形式,各驱动器单元可以独立安装,有单轴型、双轴型两种结构,常用的单轴型有A06B-6089-H10l~H106等规格,常用的双轴型有A06B-6089-H201~H210等规格,多与FANUC 0C、0D、15A/B、16A/B、18A、20、21系统配套使用。 4)与FANUC β系列伺服电动机配套的FANUC β系列数字式交流伺服驱动器,它亦是FANUC当前常用的AC伺服产品,采用电源与驱动器一体化(SVU型)的结构,驱动器带有IPM智能电源模块,采用全数字正弦波PWM控制,IGBT驱动。可以使用PWM接口、I/OLink接口,亦可以采用光缆接口。型号为 A06B-6093-H101~H104/H151~H154//H111-H114,多与FANUC 0TD、PM01等经济型数控系统配套使用。 5)与FANUC αi系列伺服电动机配套的FANUCα i系列伺服驱动器是FANUC公司的最新产品,它在FANUC α系列的基础上作了性能改进。产品通过特殊的磁路设计与精密的电流控制以及精密的编码器速度反馈,使转矩波动极小,加速性能优异,可靠性极高。电动机内装有脉冲/转极高精度的编码器,作为速度、位置检测器件,使系统的速度、位置控制达到了极高的精度。 α i系列驱动器由电源模块(PSM)、伺服驱动器(SVM)、主轴驱动器(SPM)等组成,伺服驱动与主轴驱动共用电源模块,组成伺服/主轴一体化的结构。伺服驱动模块有单轴型、双轴型、三轴型三种基本规格。标准型(FANUC αi系列)为200VAC输入,常用的单轴型有A06B-6114-H103~H109等,双轴型有 A06B-6114-H201-H211等,三轴型有A06B-6114-H301~H304等。高电压输入型(FANUC α i(HV)系列)为400VAC 输入,常用的单轴型有A06B--6124-H102~H109等,双轴型有A06B-6124-H201-H211等,目前尚无三轴型结构。FANUC αi系列交流数字伺服配套的数控系统主要有FANUC 0i、FANUC 15i/150i、 FANUC16i/18i/l60i/180i/20i/21i等。
伺服驱动器的过流故障与过电压故障,伺服驱动器的常见故障维修目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。 随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今比较重要的技术课题,越来越多工控技术服务商对伺服驱动器进行了技术深层次研究。 驱动器调试过程过电压过电流是两个比较常见的故障,下面就这两个故障做些分析,更好的帮助调试人掌握故障的基理及产生的原因,能够较快的了解故障点排除故障,让设备能尽早投入运行。 1、过电压故障:这里所指的电压常指直流母线电压,图一是常见市场驱动器主回路电路,P和N之间的电压就是直流母线电压。 直流母线电压的读取,驱动器CPU无法读取很高的电压,所以必需得通过电路转化将高电压转化为CPU可以读取的低电压,常见的有变压器输出读取法和电阻降压读取法,见图二,图三。 从上述原理图分析,过电压产生第一种是种种原因造成的驱动器C和D之间电压高于额
Profibus-DP总线在Lenze变频、伺服产品中的应用 Version 1.01
目录1. Profibus-DP 总线基础 在系统中配置Lenze产品 2. Profibus-DP 3. 过程通道通讯编程与举例 4. 参数通道通讯编程与举例 5. 常见问题解答
1.1 面向现场级与车间级的数字化通讯网络 伦茨变频、伺服驱动产品属于现场级的从站设备,即伦茨公司总 PROFIBUS-DP 线通信模块支持 通信方式。 1. Profibus-DP 总线基础
1.2 -主 从通讯结构 1. Profibus-DP 总线基础
1.3 过程通道与参数通道通讯 PROFIBUS PLC /主站()可以与伦茨变频伺服产品之间进行 — 快速的循环数据传输Process Channel 过程通道()通信, / —— 以及可读写所有伦茨产品内部参数的非循环数据传输Parameter Channel 参数通道()通讯。 1. Profibus-DP 总线基础
对于过程通道通讯而言,总线系统的响应速度主要取决于: (1) 总线波特率 (2) DP从站的数量 (3) 每个从站所配置的过程通讯字的数目 (4) 每个从站是否有参数通道通讯 用户可以依据上表作为参考: 32 当总线具有个从站,数据传输率12M 为,每个从站配置一个过程通 1ms 讯字时,总线循环时间为。 / 伦茨变频器伺服控制器对于通讯请求的响应时间为: 3 ms ~ 5 ms 过程通道: 30 ms ~ 50 ms 参数通道: 1.4 通讯响应时间估算 1. Profibus-DP 总线基础
富士伺服驱动器的常用故障代码及其检查与维护 一、检查 1、警报检出内容 (图1) (按键面板的7段LED显示器以0.5秒的间隔闪烁。) 2、警报检出时的动作 (1)在检出的同时自由运转
(图2)(2)以最大转矩减速,停止后自由运转 (图3) 二、维护 1、过电流 【显示】 (图4) 【检出内容】
主回路晶体的输出电流超过规定值。 【要因与处置】 (图5)伺服马达的动力沛县有可能漏电或短路。 通常,对地间有数MΩ以上,线圈之间的电阻值均衡。 2、过速度 【显示】 (图6) 【检出内容】 伺服马达的回转速度超过最高速度的1.1倍。 【要因与处置】 (图7)马达的回转速度有可能出现峰突。
(图8) 3、过电压 【显示】 (图9) 【检出内容】 伺服驱动器内部的直流中间电压比上限值大。 【要因与处置】 (图10)可以在按键面板的监视模式确认内部的中间电压。 On 16:直流中间电压(最大值)On 17:直流中间电压(最小值) 约在420V时检出电压。 4、编码器异常
【显示】 (图11) 【检出内容】 伺服马达内部的编码器可能已损坏。 【要因与处置】 (图12)编码器内部的CPU是以自我诊断的结果来检出警报的。 这时,伺服驱动器马达之间正在进行通信。 5、控制电流异常 【显示】 (图13) 【检出内容】 伺服驱动器内部的控制电源发生异常,有损坏的可能性。 【要因与处置】
(图14)6、记忆体异常 【显示】 (图15) 【检出内容】 保存在伺服驱动器EEPROM内部的参数内容已损坏。 【要因与处置】 (图16)发生记忆体异常时,请执行参数的初始化。 执行初始化之后仍然会检出记忆体异常时,必须更换驱动器。 7、回生晶体过热 【显示】 (图17) 【检出内容】
伺服电机可以维修吗?常见伺服电机的13种故障及维修知识汇总伺服电机原理伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。 交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似。其定子上装有两个位置互差90度的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有起动转矩大、运行范围较广、无自转现象三个显著特点。 伺服电机可以维修吗伺服电机是可以维修的,伺服电机的维修可以说是相对复杂的,但伺服电机因为长期连续不断使用或者使用者操作不当,会经常发生电机故障。伺服电机的维
目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心, 伺服驱动器(图1) [1] 可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。 随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今比较重要的技术课题,越来越多工控技术服务商对伺服驱动器进行了技术深层次研究。 编辑本段基本要求 伺服进给系统的要求 1、调速范围宽 2、定位精度高 3、有足够的传动刚性和高的速度稳定性 4、快速响应,无超调 为了保证生产率和加工质量,除了要求有较高的定位精度外, 伺服驱动器(图2) [2] 还要求有良好的快速响应特性,即要求跟踪指令信号的响应要快,因为数控系统在启动、制动时,要求加、减加速度足够大,缩短进给系统的过渡过程时间,减小轮廓过渡误差。
5、低速大转矩,过载能力强 一般来说,伺服驱动器具有数分钟甚至半小时内1.5倍以上的过载能力,在短时间内可以过载4~6倍而不损坏。 6、可靠性高 要求数控机床的进给驱动系统可靠性高、工作稳定性好,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力。 对电机的要求 1、从最低速到最高速电机都能平稳运转,转矩波动要小,尤其在低速如0.1r/min或更低速时,仍有平稳的速度而无爬行现象。 2、电机应具有大的较长时间的过载能力,以满足低速大转矩的要求。一般直流伺服电机要求在数分钟内过载4~6倍而不损坏。 3、为了满足快速响应的要求,电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压。 4、电机应能承受频繁启、制动和反转。 编辑本段有关参数 位置比例增益 1、设定位置环调节器的比例增益; 2、设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。但数值太大可能会引起振荡或超调; 3、参数数值由具体的伺服系统型号和负载情况确定。 位置前馈增益 1、设定位置环的前馈增益; 2、设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小; 3、位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡; 4、不需要很高的响应特性时,本参数通常设为0表示范围:0~100%。 速度比例增益 1、设定速度调节器的比例增益; 2、设置值越大,增益越高,刚度越大。参数数值根据具体的伺服驱动系统型号和负载值情况确定。一般情况下,负载惯量越大,设定值越大; 3、在系统不产生振荡的条件下,尽量设定较大的值。 速度积分时间常数 1、设定速度调节器的积分时间常数; 2、设置值越小,积分速度越快。参数数值根据具体的伺服驱动系统型号和负载情况确定。一般情况下,负载惯量越大,设定值越大; 3、在系统不产生振荡的条件下,尽量设定较小的值。 速度反馈滤波因子 1、设定速度反馈低通滤波器特性; 2、数值越大,截止频率越低,电机产生的噪音越小。如果负载惯量很大,可以适当减小设定值。数值太大,造成响应变慢,可能会引起振荡; 3、数值越小,截止频率越高,速度反馈响应越快。如果需要较高的速度响应,可以适当减小设定值。 最大输出转矩设置
伺服电机的13种故障及维修知识汇总 伺服电机原理 伺服主要靠脉冲来定位,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm。伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似。其定子上装有两个位置互差90度的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电
伺服驱动器维修方法 先说驱动板, 驱动板与变频器的结构基本一样. 由开关电源, 保护电路,PWM波隔离驱动, 三相逆变桥组成. 其维修原理方法可参考变频器. 先从故障入手, 排查逆变器故障, 启动电路故障, 驱动故意障,开关电源故障. 再说控制板. 此板较为复杂,一般由DSP与CPLD两主控制芯片构成. 包含电流采样, A/D, 编码器信号处理. DSP电源系统.I/O系统.相对说该板故障率低. 主要搞清楚的是主要参数的意义,这对维修很有帮助.维修要好好利\ 用参数这个工具. 第三块就是显示板了,这个多数就是电阻与数码管组成的, 很少坏. 再者是电机对于增量式容易些, 手转电机转子,用示波器测码盘输出信号即可. 绝对式的, 可以用逻辑分析仪读出 绝对数字. 正反转, 数字能加减即可! 现开始贴上维修记录, 欢迎各位交流讨论. 富士伺服RYC202C3-VVT2. 故障现象. 电机不转, 数码管无显示. 维修过程: 开盖检查电路板, 重点功率驱动板电源部分. 及风扇. 没发现有明烧坏的痕迹. 但电路板铜线有些腐蚀.估计该伺服使用环境恶劣. 上电, 检测5V输出只有0.6V , 检查反馈电路无问题. 整流管,开关管也没问题. 但发现TVS管已损坏. 换上. 开机. 故障依旧. 继续找原因. 由于该电源为多组输出. 怀疑其它组负载有短路. 于是断开所有负载. 故障依旧. 最后断定为开关变压器问题. 将变压器焊下, 拆开线圈, 发现最里层, 初级绕组有短路.. 重新绕变压器换上OK. 分析: 由于初级有短路, 破坏了振荡条件, 所以, 5V输出电压很低.
总结: 开关电源按步骤检查. 一般能找出问题. 次序为: 开关管. 整流管.整流桥.负载电路. 开关变压器. 今接修四台进口伺服,德国某牌子。是90年代中期模拟伺服驱动器。用在数控车床上的。 客户称:伺服报警。 开箱检查,30A保险烧断。测量发现W相IGBT模块短路。于是检查对应的驱动电路。发现两驱动功率管对管已短路。电阻短路。整个驱动电路零件烧掉一半了。 于是挨个检查更换。再换上IGBT模块。最后再检查另二相驱动电路,及相关部位。装好,上车床。试机。OK 松下伺服. 制动报警. 查线路.发现制动IGBT已经短路.电阻正常换好, 试机OK. TO: rhq(35楼): 伺服出现缺相, 重点检测功率驱动及功率模块。同时伺服应该会报警。估计会是电流类的,因为任一相电流没能正确采样,其它两相电流也是乱的。 TO: ncttq (36楼)编码器调零确实是伺服中的难点。你可以先找些绝对式编码器的资料看看,找卖编码器的要,呵呵,我们再讨论。 TO:yangjianjun(38楼)不知你说的伺服有显示但没内容是什么意思?国内外伺服都以数码管显示为主,有段码亮就有内容。又不是液晶有亮但没文字。。?? TO:灵感在线(39楼)三菱伺服MR-SJ2-A-10显示8,估计是控制板上控制电压异常(如:5V 3。3V 。。。)或控制板上主芯片,有短路损坏,造成伺服有报警,所以数控系统显示“伺服器未实装”。还要查一下显示相关的IC。 TO:小南南(40楼):超速一般的由指令过大与编码器异常引起,从你描述的现象看,多半是编码器问题。如:电缆接触电不好,编码器光片有裂纹等。。 有关安川变频器外部控制端子无法正常启动,应当从哪个方向上去打问题?估计是参数不对, 参数没问题的话, 查输入光藕. TO: zjw6 50楼 : 编码器坏分两种: 一是光盘坏了, 二是电路板坏了, 前种无法修复,后种可以修复. 但光盘坏的比例大些, 主要由于敲击碎裂造成. 三菱伺服MR-J2S-10上电报S02-0017,现故障确定在驱动板上,换了两个“7806”,故障依旧,外围电阻检测都没问题,请楼主指点。 AL17是电路板故障. 多数是驱动电路不良, 看看模块有没问题! 迈信EP100-3A / 凯恩帝SD100伺服驱动器 【故障现象】上电显示E9报警。 【故障分析】通过查说明书, 得知伺服报E9为编码器故障。分析认为出现此故障由于码盘
伦茨EVS 9300-EP 在停剪定尺控制中的应用 西安重型机械研究所 党幼云 王小泉 冯连强 许展望 摘要 介绍了伦茨EV S9300-EP 交流伺服位置系统在带材定尺剪切控制中的应用。叙词 定尺剪切 交流伺服位置控制器 GD C Abstract The paper show s the application of Lenze EVS 9300-EP AC servo position contr oller to specified leng th shear ing . Descriptors cut-to -length,AC serv o position contr oller,GDC 1 EV S9300-EP 简介 伦茨公司是一家专门生产机电传动产品的公司,90年代后期该公司生产的驱动系统均向智能化发展,电子传动控制产品在输入输出接口及通讯能力上体现了强大的功能。针对该停剪定尺控制系统中采用的EVS9300-EP 交流位置型伺服控制器而言,其内置精确的位置控制器精度可达万分之一,可准确实现相对或绝对的定位功能,完成最多32个独立的位置程序。同时支持RS 232/ RS485、光纤、INTERBU S-S 、PROFIBUS-DP 、CAN (伺服控制器内置)通讯方式,通过相应的插拨式连接模块与现场总线连接,方便地接入各种自动化系统。此外,它具有独立的模入、模出及开关量输入、输出通道,可方便地满足彩涂板生产线中定尺送料剪切的控制。 2 机组组成、参数、功能简介 2.1 机组组成 机组组成如图1 。 图1 2.2 机组参数 带材送料速度 2~10m /min 最高送料速度 40m/m in 带材厚度 0.3~1.2m m (钢带)带材宽度 1400m m 横切后的板材长度 200~2000m m 第一作者:党幼云,女,39岁,高级工程师,西安重型机械研究 所(710032) 横切后的板材长度精度 ±0.25mm 2.3 功能简介 本系统用于某彩色涂层钢板生产线中,将钢带纵向用圆盘剪分条并切边,然后用剪切机横向切成定尺长度。活套入口侧带材为连续运行,活套出口侧圆盘剪及送料辊为间歇工作。当送料到定尺长度时,剪刃剪切。 ? 14? 重型机械 2001 No .3
第 3 章伺服系统的故障分析与维修3.1 伺服系统概述 数控机床的伺服驱动系统主要有两种:进给驱动系统和主轴驱动系统。 前者控制机床各坐标轴的切削进给运动,后者控制机床主轴的旋转运动。 它们的职能是提供切削过程中所需要的转矩和功率,可以任意调节运转速度和准确的位置控制。 数控机床的伺服驱动系统分直流与交流两类不同的装置。 1、伺服系统的概念 伺服系统是以机械位置或角度作为控制量的自动控制系统。 在数控机床中,CNC 控制器经过插补运算生成的进给脉冲或进给位移量指令输入到伺服系统,由伺服系统经变换和功率放大转化为机床机械部件的高精度运动。 伺服系统既是数控机床控制器与刀具、主轴间的信息传递环节,又是能量放大与传递的环节,它的性能在很大程度上决定了数控机床的性能。 数控机床的最高移动速度、运动精度和定位精度等重要指标均取决于伺服系统的动、静态性能。 研究与开发高性能的伺服系统是现代数控机床的关键技术之一。 早期的数控机床,尤其是大中型数控机床常采用电液伺服系统驱动。 从八十年代起全电气伺服系统成为数控机床的主要驱动器。 2、伺服系统的基本技术要求 (1)精度高 伺服系统的精度是指输出量能复现输入量的精确程度。 在速度控制中,要求高的调速精度,比较强的抗负载扰动能力。即对静、动态精度要求都比较高。 (2)稳定性好 稳定性是指系统在给定输入或外界干扰作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。 随伺服系统要求有较强的抗干扰能力,保证进给速度均匀、平稳。 稳定性直接影响数控价格的精度和表面粗糙度。 (3)快速响应 快速响应是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。 为了保证轮廓切削形状精度和低的加工表面粗糙度,要求伺服系统跟踪指令信号的响应要快。 这一方面要求过渡过程时间要短,一般在200 ms 以内,甚至小于几十毫秒;另一方面要求超调要小。 (4)调速范围宽 调速范围Rn 指生产机械要求电机能提供的最高转速nmax 和最低转速nmin之比:Rn=nmax/nmin 。 通常,nmax和nmin一般对指额定负载时的转速,对于少数负载很轻的机械,也可以是实际负载的转速。 1)进给伺服系统的调速要求
伦茨L E N C E9300驱动器故障代码表
伦茨9300系列伦茨伺服驱动器故障代码表 2012-12-21 0:51:27 点击:125 伦茨驱动器故障代码表9300系列 优先显示含义 1 GLOBAL DRIVE INIT 键盘和控制器之间的初始化或通信错误 2 XXX - TRIP 活动行程(C0168/ 1的内容) 3 XXX - MESSAGE 活动消息(C0168/ 1的内容) 4 特别控制器状态: 4 Special controller states: 接通禁止 5 控制器源禁止(C0004的价值是在同一时间显示): STP1 端子X5/28 STP3 键盘或LE COM A/B/LI STP4 InterBus-S or Profibus STP5 系统总线(CAN) STP6 C0040 6 快速停止来源: QSP-term-Ext 在输入MCTRL-QSP的功能块MCTRL的高信号 (出厂设置应用于端子X5/E1和X5/E2的) QSP-C0135 键盘或端子A/B/LI QSP-AIF inter总线-S或ProFi系统总线 QSP-CAN 系统总线(CAN) 7 XXX - WARNING 活跃的警告(C0168/ 1的内容) 8 xxxx C0004的值 显示错误原因解决办法 --- 无错误- - CCr 系统故障强干扰对控制电缆检查控制电缆 CCr System fault 在布线的接地或接地回路确保布线合理 CE0 通讯错误转移过程中的控制指令通过自动化接口X1的错误在牢固的自动化模块和插件,如果有必要,螺栓下来 CE1 通讯错误 过程数据输入 对象CAN_IN_1 CAN_IN_1对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器 增加监控时间,如果有必要根据C0357/ 1 CE2 通讯错误过程数据输入 对象CAN_IN_2 CAN_IN_2 对象接收错误的数据,或通讯中断检查电缆在x4 检查变送器下
伺服驱动器常见故障维修方法 伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。以下为伺服驱动器维修的七大方法。 1、示波器检查驱动器的电流监控输出端时,发现它全为噪声,无法读出 故障原因:电流监控输出端没有与交流电源相隔离(变压器)。 处理方法:可以用直流电压表检测观察。 2、电机在一个方向上比另一个方向跑得快
(1) 故障原因:无刷电机的相位搞错。 处理方法:检测或查出正确的相位。 (2) 故障原因:在不用于测试时,测试/偏差开关打在测试位置。 处理方法:将测试/偏差开关打在偏差位置。 (3) 故障原因:偏差电位器位置不正确。 处理方法:重新设定。 3、电机失速 (1) 故障原因:速度反馈的极性搞错。 处理方法:可以尝试以下方法。 a.如果可能,将位置反馈极性开关打到另一位置。(某些驱动器上可以) b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。 c.如使用编码器,将驱动器上的ENC A和ENC B对调接入。 d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。 (2) 故障原因:编码器速度反馈时,编码器电源失电。 处理方法:检查连接5V编码器电源。确保该电源能提供足够的电流。如使用外部电源,确保该电压是对驱动器信号地的。 4、LED灯是绿的,但是电机不动 (1) 故障原因:一个或多个方向的电机禁止动作。 处理方法:检查+INHIBIT 和–INHIBIT 端口。 (2) 故障原因:命令信号不是对驱动器信号地的。