第四章
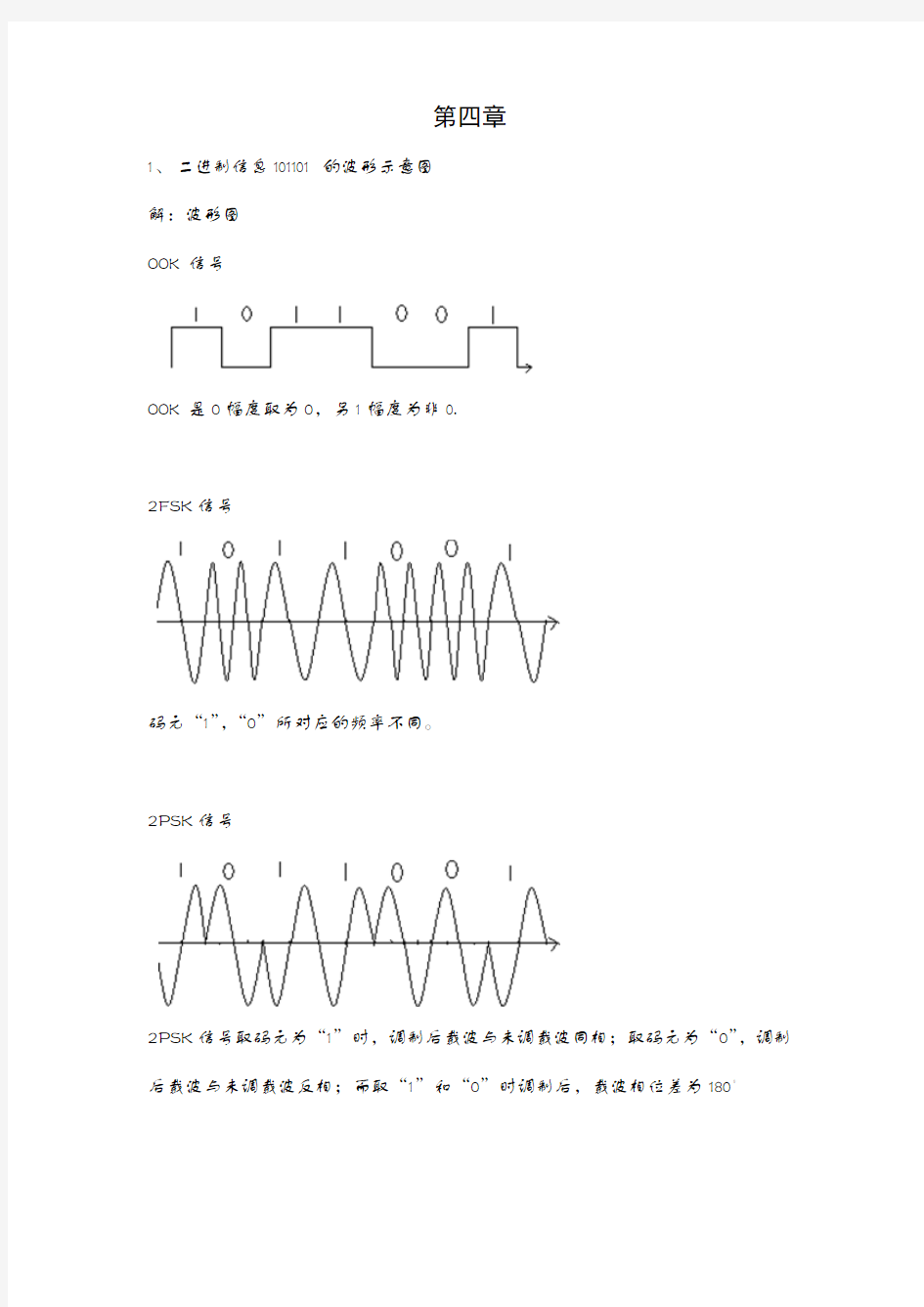
1、二进制信息101101的波形示意图
解:波形图
OOK信号
OOK是0幅度取为0,另1幅度为非0.
2FSK信号
码元“1”,“0”所对应的频率不同。
2PSK信号
2PSK信号取码元为“1”时,调制后载波与未调载波同相;取码元为“0”,调制后载波与未调载波反相;而取“1”和“0”时调制后,载波相位差为180°
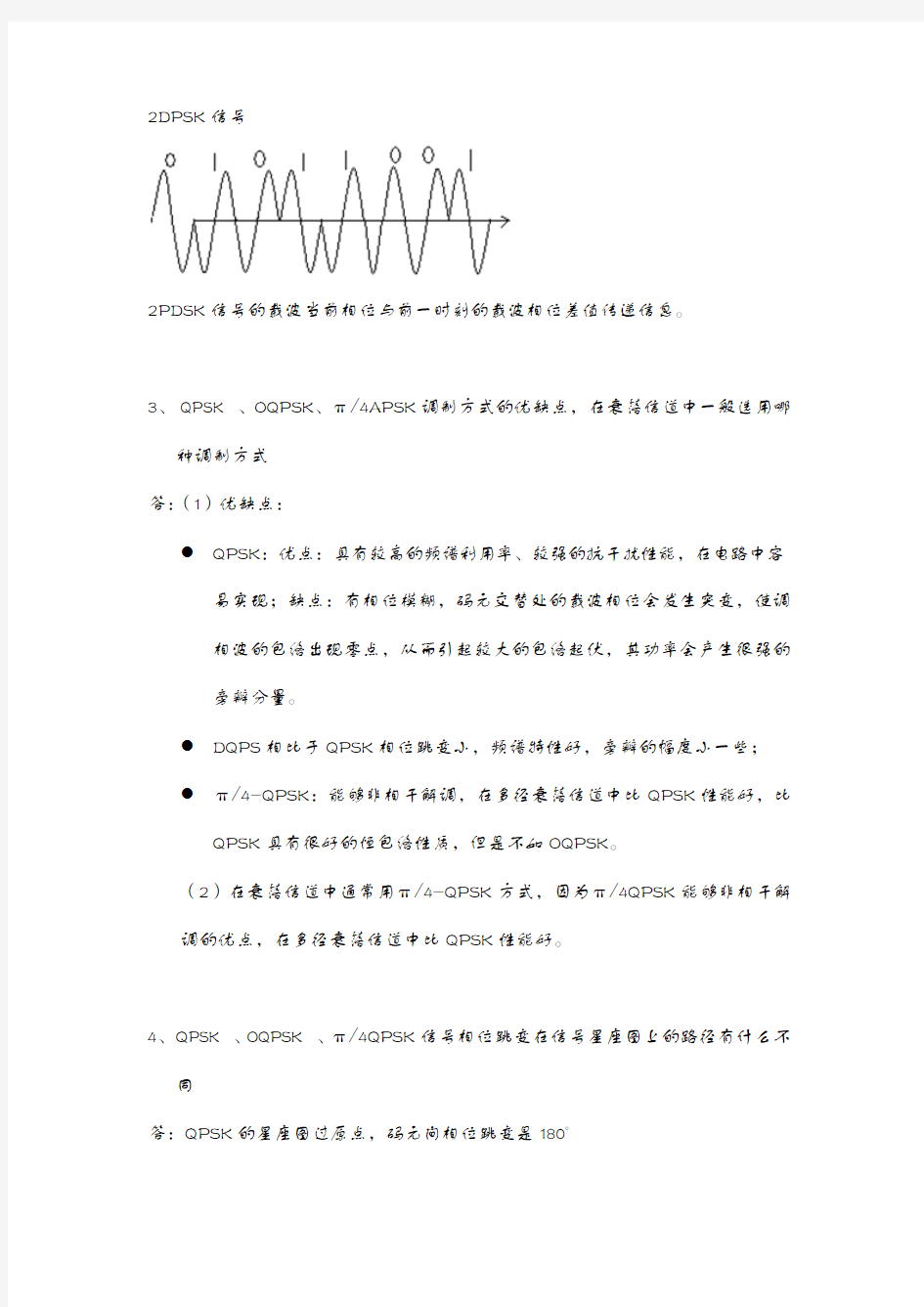
2DPSK信号
2PDSK信号的载波当前相位与前一时刻的载波相位差值传递信息。
3、QPSK 、OQPSK、π/4APSK调制方式的优缺点,在衰落信道中一般选用哪
种调制方式
答:(1)优缺点:
●QPSK:优点:具有较高的频谱利用率、较强的抗干扰性能,在电路中容
易实现;缺点:有相位模糊,码元交替处的载波相位会发生突变,使调
相波的包络出现零点,从而引起较大的包络起伏,其功率会产生很强的
旁瓣分量。
●DQPS相比于QPSK相位跳变小,频谱特性好,旁瓣的幅度小一些;
●π/4-QPSK:能够非相干解调,在多径衰落信道中比QPSK性能好,比
QPSK具有很好的恒包络性质,但是不如OQPSK。
(2)在衰落信道中通常用π/4-QPSK方式,因为π/4QPSK能够非相干解调的优点,在多径衰落信道中比QPSK性能好。
4、Q PSK 、OQPSK 、π/4QPSK信号相位跳变在信号星座图上的路径有什么不
同
答:QPSK的星座图过原点,码元间相位跳变是180°
OQPSK 的星座图不过原点,相位跳变是0°或90° π/4-QPSK 的星座图不过原点,相位跳变是135°。
8、什么是OFDM 信号?为什么可以有效抵抗频率选择性衰落?
答:OPDM 信号是正交频分复用信号,把高速的数据流通过串并变换,并且分配到多个并行的正交子载波上,同时进行传输。
OFDM 信号是将高速串行的数据流通过串并变换,分配到并行的各个子载波上传输,从而使得每个子载波上数据符号持续长度增加, OFDM 符号长度远远大于信道的最大时延扩展,可以消除时间弥散信道所带来的符号间干扰,抵抗选择性衰落。
9、OFDM 系统中CP 的作用是什么?
解:保护子载波之间的正交性,消除子载波间干扰。
11若4ASK 调制的误码率为P4,推到方形16QAM 调制的误码率 .解:4ASK 调制的误码率:
]
)14(3[23
])1(3[)11(200N E Q N M E Q
M
P
av av M
-=-
-
=413(1)44ASK P erfc erfc -=-=
即可得到方形16QAM 调制的误码率:
2
164441(1)(2)QAM ASK ASK ASK
P P P P ----=--=-。
13. 设有d min=sqrt(2)的4ASK 星座,求多增加一比特输出且仍然保持d min 不
变所需要的能量增加
16(1解:
(2)输出符号序列:
17、解:(1)、(2)
(3)
18、
4) 8PSK有可能,8QAM不可能。
5)
第五章1、简要说明直接序列扩频和解扩的原理
答:扩频:待传输信息信号的频谱与高速率的伪噪声码波形相乘后扩展频谱,成为宽频带信号。
解扩:在接收端产生一个与发信机中伪随机码同步的本地参考伪随机码,对接收信号进行相关处理。
2、为什么扩频信号能有效抑制窄带干扰?
答:因为干扰信号和本地参考伪噪声进行相关处理后,频带被扩展,干扰信号的能量被扩展到整个传输频带之内,从而降低了干扰信号的功率谱密度,然后通过相关处理后再通过中频滤波器的通频带很窄,因此绝大部分的干扰信号和噪声信号的功率会被中频滤波器滤除,达到抑制窄带干扰的目的。
6、解释频率跳变扩展系统抵抗宽带干扰和窄带干扰的物理机制
答:宽带干扰信号的能量分布在较宽的频带上,接收机通过窄带滤波器能将大部分能量滤除;窄带干扰信号,接收机可以通过躲避的办法,不让干扰信号通过接收机中的中频滤波器。因而宽带干扰,是跳频接收机将干扰信号的能量在较宽的频带上进行了平均;窄带干扰,跳频接收机将干扰信号的能量在较长的时间段内进行了平均。
11、RAKE接收机的工作原理是什么?
答:RAKE接收机由一组相关器构成,每个相关器和多径信号中的一个不同时延的分量同步,输出的是携带相同信息不同时延的信号,这些信号以适当的时延对齐后按照某种方式进行合并就可以增加信号的能量,从而改善信噪比。
12、分集接受技术的指导思想是什么?
答:分散传输:收端获得多个统计独立、携带同一信息的衰落信号;
集中处理:收到的多个统计独立的衰落信号会进行合并以降低衰落对信号的影响。
13、什么是宏观分集和微观分集?移动通信中常用哪些微观分集? 答:宏观分集是用来对抗楼房等物体的阴影效应的分集。 微观分集是用来对抗多径衰落的分集技术。
移动通信通常在多径衰落时用微观分集如空间分集、角度分集、频率分集、角度分集、时间分集。
14、合并方式有哪几种?哪一种可以获得最大的输出信噪比?为什么? 答:合并的方式最大比值合并、等增益合并、选择式合并。
最大比值合并可以获得最大的输出信噪比。最大比值合并的改善因子的改善效果最佳。 补充题:
1、 证明MAC 接收分集中,能使输出信噪比γ∑最大化的加权系数i ?为
22/i i N γ?∝。同时证明,在该加权系数下i i γγ∑=∑ 解:合并后信号:1M
R k k k r r α==∑
2
/k k r ασ=,信噪比最大,合并后输出为:21
M
mr k k k N N α==∑,其中2σ为
每条支路上的噪声功率。
2、 本题说明,由于阵列增益的原因,即使没有衰落,分集合并也能带来性能增益。考虑N 支路的分集合并系统,每个支路是信噪比为10i dB γ=的AWGN
信道。假设采用M=4的M-QAM 调制,其误码率近似为 1.5/(1)
0.2M b
P e γ--=,其中γ是接收信噪比。 (a ) 求N=1时的b P
(b ) MRC 下,求使b
P <6
10-的N 。 解: (1) 因为 1.5/(1)0.2M b P e γ--=,所以当N=1时,15*1/(41)
0.2b P e --==0.00135 (2)因为15*1/(41)0.2b P e
--=<610-,所以N>2.44,则N min =3. 3.下行MIMO 技术都包括哪几种,其具体工作原理是什么? 解:空间复用、波束赋形和传输分集
●空间复用:发射的高速数据被分成几个并行的低速数据流,在同一频带从多
个天线同时发射出去。
●波束赋形:一种应用于小间距的天线阵列多天线传输技术,其主要原理是利
用空间的强相关性及波的干涉原理产生强方向性的辐射方向图,使辐射方向图的主瓣自适应的指向用户来波方向,从而提高性噪比,提高系统容量或者覆盖范围。
●传输分集:发射分集就是在发射端使用多幅发射天线发射相同的信息,接收
端获得比单天线高的信噪比。
4.均衡器的分类有哪些。
解:线性时域均衡器、非线性时域均衡器和单载波频域均衡器、多载波频域均衡器。
第六章
1、大区制和小区制的主要区别是什么?分别适用于怎样的场合?
答:区别:大区制是由一个基站覆盖整个城市或地区。大区制的通信容量小;小区制是将整个服务区域划分成多个无线电区,每个小区都由一个基站控制,各个小区可以相互通信,小区制通信容量大。
适用场合:大区制:用户密度不大或通信容量小的系统;
小区制:用户密度较大或通信容量较大的系统。
2、为什么蜂窝网要采用六边形?
答:正六边形最接近理想的圆形辐射模式,覆盖面积最大,重叠面积最小,从而使得基站数量最小,无线频率个数最少。
3、比较顶点激励与中心激励的区别,说明顶点激励的优点
答:区别:“顶点激励”采用定点天线,在每个蜂房相间的三个顶角上设置基站;“中心激励”在无线区的中心设置基站,采用全向天线覆盖。
优点:定点激励可以消除障碍物阴影,从而降低干扰;允许较小的同频复用距离,降低构成小区单位小区簇的无线区数,简化设备,降低成本。 5、如何选取频分复用因子?
答:由D
Q R
=
=Q 为同频复用因子,D 为同频复用距离,R 为小区的辐射半径,N R 为小区数量。可得小的小区簇Q 小,同频干扰变大;大的小区簇Q 大,同频干扰减小。 6、
解:因为
S I =
可得15SIR dB ==
D
Q R
=
= 从而:N=4.59=5
7、 解:信道差值阵列:2 9 5 3 4 2 11 14 8 7 6 16 17 12 9 19 21 14 23 23 存在相同的两个值,所以不是三阶互调波道组。
无三阶互调波道信道序列直观性强,用其反响的差值序列有些不便且频率利用与不高。
哈工大机械设计大作业V带传动设计完美版
————————————————————————————————作者:————————————————————————————————日期: ?
Harbin Instituteof Technology 机械设计大作业说明书 大作业名称:机械设计大作业 设计题目:V带传动设计 班级: 设计者: 学号: 指导教师: 设计时间: 2014.10.25 哈尔滨工业大学
目录 一、大作业任务书 ........................................................................................................................... 1 二、电动机的选择 ........................................................................................................................... 1 三、确定设计功率d P ..................................................................................................................... 2 四、选择带的型号 ........................................................................................................................... 2 五、确定带轮的基准直径1d d 和2d d ............................................................................................. 2 六、验算带的速度 ........................................................................................................................... 2 七、确定中心距a 和V 带基准长度d L ......................................................................................... 2 八、计算小轮包角 ........................................................................................................................... 3 九、确定V 带根数Z ........................................................................................................................ 3 十、确定初拉力0F ......................................................................................................................... 3 十一、计算作用在轴上的压力 ....................................................................................................... 4 十二、小V 带轮设计 .. (4) 1、带轮材料选择 ............................................................................................................. 4 2、带轮结构形式 . (4) 十二、参考文献 ............................................................................................................................... 6 ?
第四章 1、二进制信息101101的波形示意图 解:波形图 OOK信号 OOK是0幅度取为0,另1幅度为非0. 2FSK信号 码元“1”,“0”所对应的频率不同。 2PSK信号 2PSK信号取码元为“1”时,调制后载波与未调载波同相;取码元为“0”,调制后载波与未调载波反相;而取“1”和“0”时调制后,载波相位差为180°
2DPSK信号 2PDSK信号的载波当前相位与前一时刻的载波相位差值传递信息。 3、QPSK 、OQPSK、π/4APSK调制方式的优缺点,在衰落信道中一般选用哪 种调制方式 答:(1)优缺点: ●QPSK:优点:具有较高的频谱利用率、较强的抗干扰性能,在电路中容 易实现;缺点:有相位模糊,码元交替处的载波相位会发生突变,使调 相波的包络出现零点,从而引起较大的包络起伏,其功率会产生很强的 旁瓣分量。 ●DQPS相比于QPSK相位跳变小,频谱特性好,旁瓣的幅度小一些; ●π/4-QPSK:能够非相干解调,在多径衰落信道中比QPSK性能好,比 QPSK具有很好的恒包络性质,但是不如OQPSK。 (2)在衰落信道中通常用π/4-QPSK方式,因为π/4QPSK能够非相干解调的优点,在多径衰落信道中比QPSK性能好。 4、Q PSK 、OQPSK 、π/4QPSK信号相位跳变在信号星座图上的路径有什么不 同 答:QPSK的星座图过原点,码元间相位跳变是180°
OQPSK 的星座图不过原点,相位跳变是0°或90° π/4-QPSK 的星座图不过原点,相位跳变是135°。 8、什么是OFDM 信号?为什么可以有效抵抗频率选择性衰落? 答:OPDM 信号是正交频分复用信号,把高速的数据流通过串并变换,并且分配到多个并行的正交子载波上,同时进行传输。 OFDM 信号是将高速串行的数据流通过串并变换,分配到并行的各个子载波上传输,从而使得每个子载波上数据符号持续长度增加, OFDM 符号长度远远大于信道的最大时延扩展,可以消除时间弥散信道所带来的符号间干扰,抵抗选择性衰落。 9、OFDM 系统中CP 的作用是什么? 解:保护子载波之间的正交性,消除子载波间干扰。 11若4ASK 调制的误码率为P4,推到方形16QAM 调制的误码率 .解:4ASK 调制的误码率: ] )14(3[23 ])1(3[)11(200N E Q N M E Q M P av av M -=- - =413(1)44ASK P erfc erfc -=-= 即可得到方形16QAM 调制的误码率: 2 164441(1)(2)QAM ASK ASK ASK P P P P ----=--=-。 13. 设有d min=sqrt(2)的4ASK 星座,求多增加一比特输出且仍然保持d min 不
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械设计大作业(二) 课程名称:机械设计 设计题目:螺旋起重器(千斤顶) 院系:机电学院 班级:1308103 设计者:王钤 学号:1130810320 指导教师:郝明辉 哈尔滨工业大学
一、 设计题目 螺旋起重机是一种简单的起重装置,用手推动手柄即可起升重物。它一般由底座、螺杆、螺母、托杯、手柄等零件组成。起重机的原始数据如下所 二、 设计内容 1、 选择螺杆、螺母的材料 螺杆采用45号钢调质,由参考文献[2]表10.2查得抗拉强度 b 600 MPa σ=,s 355 MPa σ=。螺母材料用铝青铜CuAl10Fe3Z (考虑速度低) 。 2、 耐磨性计算 螺杆选用45钢,螺母选用铸造铝青铜CuAl10Fe3Z ,有参考文献[1]表8.11 查得[]p =18~25MPa ,人力驱动时[]p 值可以加大20%,则[]p =21.6~30MPa ,取 []25MPa p = 。按耐磨性条件设计螺纹中径2d ,选用梯形螺纹,则 2d ≥,由参考文献[1]查得,对于整体式螺母系数 1.2~2.5ψ=,取 1.5ψ=。则 222.6d mm ≥== 式中,Q F -----轴向载荷,N ; 2d -----螺纹中径,mm ; []p -----许用压强,MPa ; F
查参考文献[2]表11.3、11.4取公称直径32d =mm ,螺距6P =mm ,中径 229d =mm ,小径325d =mm ,内螺纹大径433D =mm 。 3、 螺杆强度校核 螺杆危险截面的强度条件为: e []σσ=≤ 式中:Q F -----轴向载荷,N ; 3d -----螺纹小径,mm ; 1T -----螺纹副摩擦力矩,N mm ?,2 1tan(') 2 Q d T F ψρ=+,ψ为螺纹升角,216 arctan arctan 3.767929 np d ψππ?===? 。 []σ-----螺杆材料的许用应力,MPa 。 查参考文献[1]表11.3得钢对青铜的当量摩擦因数'0.08~0.10f =,取 '0.09f =,螺纹副当量摩擦角'arctan 'arctan 0.09 5.1427f ρ=== 。把已知值代入1T 计算式中,得: 129 30000tan(3.7679 5.1427)682022 T N mm =? ?+?=? 72.2e MPa σ== 由参考文献[1]表8.12可以查得螺杆材料的许用应力s []3~5 σσ= ,其中 s 355 MPa σ=,则[]71~118 MPa σ=,取[]σ=100MPa 。 显然,e []σσ<,螺杆满足强度条件。 4、 螺母螺纹牙的强度校核 螺母螺纹牙根部的剪切强度条件为 4[]Q F Z D b ττπ= ≤ 式中:Q F -----轴向载荷,N ;
HarbinI n s t i tut e o fTech n o logy 机械设计大作业说明书大作业名称:轴系设计 设计题目: 5.1.5 班级:1208105 设计者: 学号: 指导教师: 张锋 设计时间:2014.12.03 哈尔滨工业大学
哈尔滨工业大学 机械设计作业任务书 题目___轴系部件设计____ 设计原始数据: 方案电动机 工作功 率P/k W 电动机满 载转速n m /(r/min) 工作机的 转速n w /(r/min) 第一级 传动比 i1 轴承座 中心高 度 H/mm 最短工 作年限 工作环 境 5.1.5 3 710 80 2 170 3年3 班 室内清 洁 目录 一、选择轴的材料 (1) 二、初算轴径 (1) 三、轴承部件结构设计 (1) 3.1轴向固定方式 (2) 3.2选择滚动轴承类型 (2) 3.3键连接设计 (2) 3.4阶梯轴各部分直径确定 (2) 3.5阶梯轴各部段长度及跨距的确定 (2) 四、轴的受力分析 (3) 4.1画轴的受力简图 (3) 4.2计算支反力 (3) 4.3画弯矩图 (3) 4.4画转矩图 (5) 五、校核轴的弯扭合成强度 (5)
六、轴的安全系数校核计算………………………………………………6 七、键的强度校核 (7) 八、校核轴承寿命 (8) 九、轴上其他零件设计 (9) 十、轴承座结构设计 (9) 十一、轴承端盖(透盖).........................................................9参考文献 (10)
一、选择轴的材料 该传动机所传递的功率属于中小型功率,因此轴所承受的扭矩不大。故选45号钢,并进行调质处理。 二、初算轴径 对于转轴,按扭转强度初算直径 3min m P d C n ≥ 式中: P ————轴传递的功率,KW ; m n ————轴的转速,r/mi n; C————由许用扭转剪应力确定的系数,查各种机械设计教材或机械设计手册。 根据参考文献1表9.4查得C=118~106,取C=118, 所以, mm n P C d 6.23355 85.211833==≥ 本方案中,轴颈上有一个键槽,应将轴径增大5%,即 ????d ≥23.6×(1+5%)=24.675mm 按照GB 2822-2005的a R 20系列圆整,取d=25mm。 根据GB/T1096—2003,键的公称尺寸78?=?h b ,轮毂上键槽的尺寸 b=8m m,mm t 2.0013.3+= 三、轴承部件结构设计 由于本设计中的轴需要安装带轮、齿轮、轴承等不同的零件,并且各处受力不同,因此,设计成阶梯轴形式,共分为七段。以下是轴段的草图: 3.1及轴向固定方式 因传递功率小,齿轮减速器效率高、发热小,估计轴不会长,故轴承部件的固定方式可采用两端固定方式。因此,所涉及的轴承部件的结构型式如图2所示。然后,可按轴上零件的安装顺序,从min d 处开始设计。 3.2选择滚动轴承类型 因轴承所受轴向力很小,选用深沟球轴承,因为齿轮的线速度,齿轮转动时飞溅的润滑油不足于润滑轴承,采用油脂对轴承润滑,由于该减速器的工作环境清 洁,脂润滑,密封处轴颈的线速度较低,故滚动轴承采用毡圈密封,由于是悬臂布置所以不用轴上安置挡油板。 3.3 键连接设计 轴段⑦ 轴段⑥ 轴段⑤ 轴段④ 轴段③ 轴段② 轴段① L1 L2 L3 图1
main clc; LengthOfSignal=10240; %设置信号长度(由于最好大于两倍fc奈奎斯特采样) fm=512; %最大多普勒频移 fc=5120; %载波频率 t=1:LengthOfSignal; % SignalInput=sin(t/100); SignalInput=sin(t/100)+cos(t/65); %时域信号输入 delay=[0 21 62 100 150 250]; %设置不同路径的时延 power=[0 -1 -5 -11 -16 -20]; %功率衰减系数dB y_in=[zeros(1,delay(6)) SignalInput]; %为时移补零 y_out=zeros(1,LengthOfSignal); %时域输出信号 fori=1:6 Ray; y_out=y_out+r.*y_in(delay(6)+1-delay(i):delay(6)+LengthOfSignal-delay(i))*10^(power(i)/20); end; %进行输出信号叠加 figure(1); subplot(2,1,1); plot(SignalInput(delay(6)+1:LengthOfSignal),'r'); %画出时域信号输入波形 title('时域信号输入'); subplot(2,1,2); plot(y_out(delay(6)+1:LengthOfSignal),'r'); %画出时域信号输出波形 title('时域信号输出'); figure(2); plot(Sf1,'r'); title('多普勒滤波器的频率响应特性'); %画出多普勒滤波器的频率响应特性 Ray f=1:2*fm-1; %设置通频带宽度 y=0.5./((1-((f-fm)/fm).^2).^(1/2))/pi; %多普勒功率谱函数(基带) Sf=zeros(1,LengthOfSignal); Sf1=y;%多普勒滤波器的频率响应特性 Sf(fc-fm+1:fc+fm-1)=y; %(把基带映射到载波频率) x1=randn(1,LengthOfSignal); x2=randn(1,LengthOfSignal); nc=ifft(fft(x1+1i*x2).*sqrt(Sf)); %同相分量nc函数表达式 x3=randn(1,LengthOfSignal); x4=randn(1,LengthOfSignal);
机械装备大作业 卧式升降台铣床主传动系统设计 学院:机电学院 专业:机械设计制造及其自动化系 班级:1008104班 姓名:刘朝友 学号:1100801005 哈尔滨工业大学
目录 一、设计任务................................................................................................. 错误!未定义书签。 二、运动设计 (1) 1 确定转速系列 (1) 2 绘制转速图 (2) 3 确定变速组齿轮传动副的齿数及定比传动副带轮直径 (3) 4 绘制传动系统图 (5) 5 核算主轴转速误差 (6) 三、动力设计 (7) 1 传动轴的直径的确定 (7) 2 齿轮模数的初步计算 (8) 3、选择带轮传动带型及根数 (9) 参考文献 (9)
一、设计任务 设计题目:卧式升降台铣床主传动系统设计 已知条件:工作台面积320×12500mm2,最低转速31.5r/min ,公比φ=1.41,级数Z=12,切削功率N=5.5KW 。 设计任务: 1. 运动设计:确定系统的转速系列;分析比较拟定传动结构方案;确定传动副的传动 比和齿轮的齿数;画出传动系统图;计算主轴的实际转速与标准转速的相对误差。 2. 动力设计:确定各传动件的计算转速;初定传动轴直径、齿轮模数;选择机床主轴 结构尺寸。 二、运动设计 1、确定转速系列 已知最低转速为31.5r/min ,公比?=1.41,查教材表标准转速系列的本系统转速系列如下: 31.5 45 63 90 125 180 250 355 500 710 1000 1400r/min 则转速的调整范围max min 1400 44.4431.5 n n R n = == 1)传动组和传动副数可能的方案有: 12=4?3 12=3?4 12=3?2?2 12=2?3?2 12=2?2?3 前两个方案虽然可以减少轴的数目,但有一个传动组内有四个传动副。若采用一个四连滑移齿轮,则会增加轴向尺寸;若用两个双联滑移齿轮,操纵机构必须互锁防止两滑移齿轮同时啮合。故不采用。 对于后三个方案,遵循传动副“前多后少”的原则,选取方案12=3?2?2 2)确定结构式 12=3?2?2方案中,因基本组和扩大组排列顺序的不同而有以下6种扩大顺序方案: 63122312??=, 61222312??=, 16222312??= 36122312??=, 21422312??=, 12422312??= 方案1,2,3,4的第二扩大组26x =,2p =2,则2r = max ) 12(68r ==-??是可行的。方案5,6中,2x =4,23p =,则2r = max ) 13(416r ?=-??,不可行。 在可行的1,2,3,4方案中,为使中间传动轴变速范围最小,采用扩大顺序与传动顺序 一致的传动方案1,13612322=??。
1. 表6 - 1 所列的各种模拟蜂窝系统的主要区别有哪些? 各种系统之间能否实现漫游? 答:首先,各个模拟蜂窝系统的基站/移动台发射频率不同,所有的系统都是基站发射频率高于移动台发射频率。频道间隔各个系统也不相同,NMT-900频道间隔是12.5KHz,AMPS 频道间隔是30KHz,其余系统均是25KHz。移动台和基本发射频率间隔除NMT-450是10MHz,NTT系统是50MHz,其余系统均是45MHz。基站和移动台发射功率各个系统也不相同,小区半径也不相同,并且变化范围很大,普遍在0.5-20/2-20/1-40km。各个系统的区群设置普遍是7/12,NMT-900和NTT系统的区群设置是9/12。话音调制各个系统均采用FM调制,但频偏有所不同。信令调制方式存在差异,除北欧的系统采用FFSK方式,其他系统均采用FSK 方式。各个系统的信令速率差异较大,信令速度最慢的是日本的NTT系统仅为0.3Kb/s,最快的为AMPS系统,信令速率为10Kb/s。纠错编码均采用卷积码,但各个系统纠错编码参数不同。基于上述分析,因为各个系统的发射频率不同,话音调制方式也不相同,信令编码的调制方式也不相同,各个系统的差异较多,它们互不兼容,因此移动用户无法在各种系统之间实现漫游。 2. 某手机的灵敏度为-110 dBm, 若接收机输入阻抗为50 Ω,试求出相应的以电压表示的灵敏度。 答:-110dBm=(-110-30)dB=-140Db -140=10log(U2/50) U=0.71uV 手机的电压灵敏度为0.71uV。 3. 蜂窝系统中有哪些信道类型,各有何特点? 在话音信道中传输哪些控制信令? 答:蜂窝系统中有无线信道和有线信道,这两种信道中都有话音信道和控制信道。话音信道用于传送话音,控制信道专用于传送控制信令。控制信道是为建立话音信道服务的,所以控制信道也称为建立信道。话音信道中传输的控制信令有SAT监测音信号和ST信令音信号,SAT是在前向和反向话音信道上传输的,ST是在反向话音信道上传输的。 4. 2-M:根据表7-6的GSM容量计算方法,计算D-AMPS和PDC系统的容量(答案已知,给出完整详细计算过程)?GSM系统的容量低于D-AMPS和PDC系统的容量,分析其原因何在? 答:首先给出信道数与流入话务量之间的关系表格 总频段25MHz,频道带宽30KHz,每频道信道数为3, 频道总数M= 25000/30*3=2500 按照区群数7计算,ch/cell=2500/7=357 每个小区又分为三个扇区,每个扇区的信道数=2500/7/3=119 根据上表,可知每个扇区的爱尔兰为106.44,可知Erl/cell=106.44*3=319.32
《机械制造装备设计》大作业 一、大作业类型: 1.设计类 2.论文类 二、周知: 每位同学在课程结束前(16周)至少上交一份大作业作为本课程的考核材料,占课程总成绩的70%。电子版和打印版各一份,由各班学习委员收齐上交,电子版由各班学习委员刻录光盘后统一上交存档。 三、设计或撰写要求 (一)设计类 1. 机床主传动系统设计 设计目的:通过机床主传动系统设计,使学生进一步理解设计理论,得到设计构思、方案分析、零件计算、查阅技术资料等方面的综合训练,树立正确的设计思想,掌握基本的设计方法,培养学生具有初步机械系统设计和计算能力。 设计内容:机床主传动系统设计的运动设计和动力设计 (1)运动设计 根据给定的机床用途、规格、极限速度、转速数列公比(或转速级数),分析、比较、拟定传动结构方案(包括结构式、转速图和传动系统图),确定传动副的传动比及齿轮的齿数,并计算主轴的实际
转速与标准转速的相对误差。 (2)动力设计 根据给定的电动机功率和传动件的计算转速,初步计算传动轴直径、齿轮模数;确定皮带类型及根数,确定机床主轴结构尺寸。 设计要求: (1)机床的规格及用途; (2)运动计; (3)动力设计(包括零件及组件的初算); (4)其它需要说明或论证的问题; (5)参考文献。 机床主传动系统设计大作业篇幅不少于3000字。要求论证充分、计算正确、叙述简明、条理清楚、合乎逻辑、词句通顺、标点正确、文字工整、图表清晰。 大作业后须附有参考文献目录,包括作者、书刊名称、出版社和出版年份。在说明书中引用所列的参考文献时,只在方括号里注明所列文献序号即可。 设计题目:XX机床主传动系统运动和动力设计 (三相4极异步电机,同步转速1500rpm)
第一章 1. 何为移动通信移动通信有哪些优点 答:移动通信是指通信的双方至少有一方在移动中(或者停留在某一非预定的位置上) 进行信息传输和交换,这包括移动体(车辆、船舶、飞机和行人)和移动体之间的通信, 移动体和固定点(固定无线电台和有线用户)之间的通信。 移动通信的优点:主要在于其移动性,可以随时随地的进行信息的交换和传输。 (1)频谱利用率高,有利于提高系统容量 (2)能够提供多种业务服务,提高通信系统的通用性 (3)抗噪声、抗干扰和抗多径衰落的能力强 (4)能实现更有效、灵活的网络管理和控制 (5)便于实现通信的安全保密 (6)可降低设备成本和减小用户手机的体积和重量 2. 单工通信与双工通信有何特点各有何优缺点 答:单工通信的特点:收发信机轮流工作、设备简单、省电、只允许一方发送时另一方进 行接收;优点:设备简单、省电。缺点:通信的时间长、使用不方便。 双工通信的特点:收发信机可以同时工作、使用方便,电源的消耗大;优点:使用 方便、收发信机可以同时工作。缺点:发射机总是工作的,电源消耗大。 3. 常用的移动通信系统包括哪几种类型 答:蜂窝移动通信系统,无绳电话系统,集群移动通信系统,移动卫星通信系统,分组无线 网,GPRS 通信系统,N-CDMA 系统,第三代移动通信等 第二章 15 信号通过移动信道时,在什么样情况下遭受到平坦衰落在什么样情况下遭受到频率 选择性衰落 答:如果信道带宽大于发送信号的带宽,且在带宽范围内有恒定增益,且线性相关,则 接收信号就会经历平坦衰落过程;如果信道具有恒定增益和线性相位的带宽范围小于发送信 号带宽,则该信道特性会导致接收信号产生频率选择性衰落。 16 简述快衰落、慢衰落产生原因及条件。 答:快衰落产生原因:信道的相关(相干)时间比发送信号的周期短,且信号的带宽B s 小于多普勒扩展D B ,信道冲击响应在符号周期内变化很快,从而导致信号失真,产生衰落。 信号经历快衰落的条件是: s c s D T T B B >< 慢衰落产生的原因:信道的相关(相干)时间远远大于发送信号的周期,且信号的带宽 B s 远远大于多普勒扩展D B ,信道冲击响应变化比要传送的信号码元的周期低很多,可以 认为该信道是慢衰落信道。 信号经历慢衰落的条件是:
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业设计计算说明书 题目:设计螺旋起重器(千斤顶) 系别: 班号: 姓名: 日期:
Harbin Institute of Technology 哈尔滨工业大学 机械设计作业任务书 题目:设计螺旋起重器 设计原始数据:题号3.1.1 起重量Fq=30 kN 最大起重高度H=180mm
一 选择螺杆、螺母的材料 螺杆采用45#调制钢,由参考文献[2]表10.2查得抗拉强度b 600 MPa σ=,s 355 MPa σ=。 螺母材料用铝黄铜ZCuAl10Fe3。 二 耐磨性计算 螺杆选用45# 钢,螺母选用铸造铝黄铜ZCuAl10Fe3,由参考文献[1]表 5.8 查得[]p =18~25MPa 从表 5.8 的注释中可以查得,人力驱动时[]p 值可以加大20%,则[]p =21.6~30MPa 取[]25MPa p = 。 按耐磨性条件设计螺纹中径2d ,选用梯形螺纹,则 2d ≥ 由参考文献[1]查得,对于整体式螺母系数2ψ==1.2—2.5,取2ψ=。 则 式中:Q F -----轴向载荷,N ; 2d -----螺纹中径,mm ; []p -----许用压强,MPa ; 查参考文献[2]表11.5取公称直径28d =mm ,螺距3P =mm ,中径226.5d =mm ,小径 324.5d =mm ,内螺纹大径428.5D =mm 。 三 螺杆强度校核 螺杆危险截面的强度条件为: 219.6d mm ≥==
e []σσ=≤ (2) 式中:Q F -----轴向载荷,N ; 3d -----螺纹小径,mm ; 1T -----螺纹副摩擦力矩,2 1tan(') 2Q d T F ψρ=+ (3) ψ为螺纹升角,ψ ; []σ-----螺杆材料的许用应力,MPa 。 查参考文献[1]表5.10得钢对青铜的当量摩擦因数'0.08~0.10f =,螺纹副当量摩擦角 'arctan 'arctan 0.08~arctan 0.10 4.5739~5.7106f ρ===,取'5.7106ρ=(由表5.10的注 释知,大值用于启动时,人力驱动属于间歇式,故应取用大值)。把数据代入(3)式中,得 把数据代入(2)式中,得 由参考文献[1]表5.9可以查得螺杆材料的许用应力 s []4σ σ= (4) 其中s 355 MPa σ=,则 []88.75a MP σ= 显然,e []σσ<,螺杆满足强度条件。 四 螺母螺牙强度校核 螺母螺纹牙根部的剪切强度条件为 4[]Q F Z D b ττπ= ≤ (5) 式中:Q F -----轴向载荷,N ; 4D -----螺母螺纹大径,mm ; 126.5 30000tan(2.0637 5.1427)502612T N mm =??+?= ?70.4e MPa σ==
1第一章 1-3单工通信和双工通信有什么区别?各有什么优缺点? 单工通信是指通信双方电台交替地进行收信和发信。优点:收发机可使用同一副天线,而不需要天线共用器,设备简单,功耗小。缺点:操作不方便,在使用过程中,往往会出现通话断续现象。 双工通信是指通信双方,收发机均同时工作。优点:任一方通话时都可以听到对方的语音,没有按“按-讲”开关,双方通话想市内通话一样。缺点:在使用过程中,不管是否发话,发射机总是工作的,故电能消耗大,这对以电池为能源的移动台是很不利的。 1-4无线信道几种双工方式各自的特点及优点分别是什么? 频分双工(FDD)利用两个不同的频率来区分收、发信道。即对于发送和接收两种信号,采用不同频率进行传输。 优点:快衰落对于FDD影响较小,FDD支持用户的移动速率高,能达到TDD的两倍甚至更高。FDD可以借助频率选择性进行干扰隔离,系统内和系统间干扰小。不需要复杂的网络规划和优化技术。 时分双工(TDD)利用同一频率但不同的时间段来区分收、发信道。即对于发送和接收两种信号,采用不同时间(时隙)进行传输。 时分双工的优点: 1.能够灵活配置频率,使用FDD系统不易使用的零散频段; 2.可以通过调整上下行时隙转换点,提高下行时隙比例,能够很好的支持非对称业务; 3.具有上下行信道一致性,基站的接收和发送可以共用部分射频单元,降低了设备成本; 4.接收上下行数据时,不需要收发隔离器,只需要一个开关即可,降低了设备的复杂度; 5.具有上下行信道互惠性,能够更好的采用传输预处理技术,如预RAKE技术、联合传输(JT)技术、智能天线技术等,能有效地降低移动终端的处理复杂性。 1-6 简述蜂窝移动通信系统的发展和各阶段的特点。 蜂窝组网理论的提出要追溯到20世纪70年代中期,随着民用移动通信用户数量的增加,业务范围的夸大,有限的频谱供给与可用频道数要求递增之间的矛盾日益尖锐。为了更有效地利用有效的频谱资源,美国贝尔实验室提出了小区制,蜂窝组网的理论。 (1)第一代蜂窝移动通信系统 20世纪70年代,美国贝尔实验室提出了蜂窝小区和频率复用的概念。 1978年,贝尔实验室开发了先进的数字移动电话系统,这是第一中真正意义上的具有随时随地通信的大容量的蜂窝移动通信系统。随后其他工业化国家也相继开发出蜂窝式公用移动通信网。特点:这些系统都是双工的基于频分多址的模拟指示系统,其传输的无线信号为模拟量,利用蜂窝组网技术以提高频率资源利用率,采用蜂窝网络结构,客服大区制容量密度低、活动范围
哈工大机械制造大作业
一、零件分析 题目所给的零件是CA6140车床的拨叉。它位于车床变速机构中,主要起换档,使主轴回转运动按照操作者的要求工作,获得所需的速度和扭矩的作用。零件上方的孔与操纵机构相连,二下方的Φ55叉口则是用于与所控制齿轮所在的轴接触,拨动下方的齿轮变速。 其生产纲领为批量生产,且为中批生产。
图1-1 CA6140拨叉零件图 二、零件的工艺分析 零件材料采用HT200,加工性能一般,在铸造毛坯完成后,需进行机械加工,以下是拨叉需要加工的表面以及加工表面之间的位置要求:
1、小头孔Φ25:该加工面为内圆面,其尺寸精度要求为; 2、叉口半圆孔Φ55:该加工面为内圆面,其尺寸精度要求为; 3、拨叉左端面:该加工面为平面,其表面粗糙度要求为,位置精度要求与内圆面圆心距离为; 4、叉口半圆孔两端面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为; 5、拨叉左端槽口,其槽口两侧面内表面为平面,表面粗糙度要求为,其垂直度与小头孔中心线的垂直度为0.08mm。 6、孔圆柱外端铣削平面,加工表面是一个平面,其表面粗糙度要求为。 三、确定毛坯
1、确定毛坯种类: 零件材料为,查阅机械制造手册,有,考虑零件在机床运行过程中受冲击不大,零件结构又比较简单,故选择铸造毛坯。 图3-1 毛坯模型 2、毛坯特点: (1)性能特点: (2)结构特点:一般多设计为均匀壁厚,对于厚大断面件可采用空心结构。CA6140拨叉厚度较均匀,出现疏松和缩孔的概率低。 (3)铸造工艺参数: 铸件尺寸公差:铸件公称尺寸的两个允许极限尺寸之差成为铸件尺寸公差。成批和大量生产
哈尔滨工业大学 机械设计作业设计计算说明书 题目: 轴系部件设计 系别: 英才学院 班号: 1436005 姓名: 刘璐 日期: 2016.11.12
哈尔滨工业大学机械设计作业任务书 题目:轴系部件设计 设计原始数据: 图1 表 1 带式运输机中V带传动的已知数据 方案d P (KW) (/min) m n r(/min) w n r 1 i轴承座中 心高H(mm) 最短工作 年限L 工作 环境 5.1. 2 4 960 100 2 180 3年3班 室外 有尘 机器工作平稳、单向回转、成批生产
目录 一、带轮及齿轮数据 (1) 二、选择轴的材料 (1) 三、初算轴径d min (1) 四、结构设计 (2) 1. 确定轴承部件机体的结构形式及主要尺寸 (2) 2. 确定轴的轴向固定方式....................................... 错误!未定义书签。 3. 选择滚动轴承类型,并确定润滑、密封方式 .................. 错误!未定义书签。 4. 轴的结构设计................................................ 错误!未定义书签。 五、轴的受力分析 (4) 1. 画轴的受力简图 (4) 2. 计算支承反力 (4) 3. 画弯矩图 (5) 4. 画扭矩图 (5) 六、校核轴的强度 (5) 七、校核键连接的强度 (7) 八、校核轴承寿命 (8) 1. 计算轴承的轴向力 (8) 2. 计算当量动载荷 (8) 3. 校核轴承寿命 (8) 九、绘制轴系部件装配图(图纸) (9) 十、参考文献 (9)
CHAPTER1 1.简述移动通信的发展和各个阶段的特点 2.未来移动通信发展的趋势是什么 3.为什么最佳的小区形状是正六边形 1)无缝覆盖相同面积,用正六边形所需正六边形数量最少,即所需最少的无线频率个 数; 2)区域间隔最大为; 3)重叠部分面积最小; 4)重叠区的宽度最小。
4.什么叫中心激励,什么叫顶点激励后者有什么好处 1)在每个小区中,基站可设在小区的中央,用全向天线形成圆形覆盖区,这就是所谓 “中心激励”方式。 2)也可以将基站设计在每个小区六边形的三个顶点上,每个基站采用三幅120度扇形 辐射的定向天线,分别覆盖三个相邻小区的各三分之一区域,每个小区由三副120 度扇形天线共同覆盖,这就是“顶点激励”。 采用顶点激励方式,所接收的同频干扰功率仅为全向天线系统的1/3,因此可以减少系统的通道干扰。 5.如何选取频率复用因子 ,N为簇的大小。如果为了提高容量可以选择小的Q值,因为,小Q则小N;如果为了提高传输的质量,则要选择大的Q值。 6.无线信道有几种双工方式各自的特点及优点分别是什么 全双工:一般使用同一对频道,以实施频分双工(FDD)工作方式。这种工作方式虽然耗电量大,但使用方便,在移动通信系统中应该用广泛。 半双工:一方使用双工方式,另一方使用双频单工方式。这种方式,设备简单,功耗小,克服了通话断断续续的现象。但其操作仍不太方便,主要用于专业移动通信系统中。7.解: 设x为话音信道数,y为数据信道数,则有,又因为x,y均为整数,所以解有以下三种情况: 分别求三种解形式下的每个T的通信话费的数学期望: 当时, 当时, 当时,
综上可知,当信道分成三个话音信道和一个数据信道时期望收益最大。CHAPTER2 1.设天线发射高度为200米,接收天线高度为20米,求视距传播的极限距离若发射天线 高度为100米,视距传播的极限距离又是多少 由公式 当发射天线为200米时,d=;当发射天线为100米时,d= 2.工作频率800MHz,移动速度60km/h,背离基地台运动时,多普勒频移为多大 ,,带入数据得 3.什么是快衰落、什么是频率选择性衰落,其出现的原因分别是什么 快衰落:当信道的相关时间比发送信号的周期短,且基带信号的带宽Bs小于多普勒扩展时,信道冲激响应在符号周期内变化很快,从而导致信号失真,产生衰落,此衰落称为快衰落; 频率选择性衰落:是指传输信道对信号不同的频率成分有不同的随机响应,信号中不同频率分量的衰落不一致,引起信号波形失真。频率选择性衰落是由信道中发送信号的时间色散引起的,当发送信号的带宽大于信道的相关带宽,由频域可以看出,不同频率获得不同增益时,信道会产生频率选择性衰落。 4.多径衰落的原因是什么多径延时与相关带宽的关系是什么多径延时与相关带宽对传输 信号带宽有什么影响 a)传输到移动台的信号不是单一路径来的,而是许多路径来的多个信号的叠加。因为 电波通过各个路径的距离不同,所以各个路径电波到达接收机的时间不同,相位也 就不同。不同相位的多个信号在接受端叠加,有时是同相叠加而加强,有时是反相 叠加而减弱。这样接收信号的幅度将急剧变化,产生所谓的多径衰落。 b)相关带宽,其中为rms时延扩展。 影响:对于一个固定的移动信道,存在一个固有的相关带宽。当信号带宽大于相关带宽
机械制造装备设计大作业指导书 2013年3月
目录 1.机械制造装备设计大作业的目的 (1) 2.机械制造装备设计大作业的内容 (1) 2.1运动设计 (1) 2.2动力设计 (1) 3.机械制造装备设计大作业的要求 (1) (1)机床的规格及用途; (1) (2)运动设计; (1) (3)动力设计(包括零件及组件的初算); (1) (4)画传动系统图; (1) (5)其它需要说明或论证的问题; (1) (6)参考文献。 (1) 4.进行机械制造装备设计大作业的步骤和方法 (1) 4.1明确题目要求、查阅有关资料 (1) 4.2运动设计 (2) (1)确定极限转速 (2) (2)确定公比 (2) (3)求出主轴转速级数z (2) (4)确定结构网或结构式 (2) (5)绘制转速图 (2) (6)绘制传动系统图 (3) (7)确定变速组齿轮传动副的齿数 (3) (8)核算主轴转速误差 (4) 4.3动力设计 (4) 1.传动轴直径初定 (5) 2.主轴轴颈直径的确定 (5) 3.齿轮模数的初步计算 (5) 5.大作业题目 (7) 参考文献 (10)
1.机械制造装备设计大作业的目的 机械制造装备设计大作业,是机械制造装备设计课程进行过程中的一个重要教学环节。其目的在于通过机床主传动系统设计,使学生进一步理解设计理论,得到设计构思、方案分析、零件计算、查阅技术资料等方面的综合训练,树立正确的设计思想,掌握基本的设计方法,培养学生具有初步机械系统设计和计算能力。 2.机械制造装备设计大作业的内容 运动设计 根据给定的机床用途、规格、极限速度、转速数列公比(或转速级数),分析比较拟定传动结构方案(包括结构式和结构网,转速图)和传动系统图,确定传动副的传动比及齿轮的齿数,并计算主轴的实际转速与标准转速的相对误差。 动力设计 根据给定的电动机功率和传动件的计算转速,初步计算传动轴直径、齿轮模数;确定皮带类型及根数、摩擦片式离合器的尺寸和摩擦片数及制动器尺寸、选择机床主轴结构尺寸。 3.机械制造装备设计大作业的要求 (1)机床的规格及用途; (2)运动设计; (3)动力设计(包括零件及组件的初算); (4)画传动系统图; (5)其它需要说明或论证的问题; (6)参考文献。 机械装备设计大作业篇幅不少于四千字。要求论证充分、计算正确、叙述简明、条理清楚、合乎逻辑、词句通顺、标点正确、文字工整、图表清晰。 大作业中所用公式应注明出处,并注明式中符号所代表的意义和单位。单位一律采用法定单位,单位符号在公式、计算结果、图表、数据、标牌中应优先采用单位符号。 大作业后须附有参考文献目录,包括作者、书刊名称、出版社和出版年份。在说明书中引用所列的参考文献时,只在方括号里注明所列文献序号即可。 4.进行机械制造装备设计大作业的步骤和方法 明确题目要求、查阅有关资料 学生在获得大作业的题目之后,首先应明确设计任务,并阅读《械装备设计大作业指导书》,了解大作业的目的、内容、要求和进行的步骤。然后在教师的指导下,拟定工作进度计划;查阅必要的图书、杂志、手册、图册、产品图纸、同类型机床说明书和其它有关设计参考资料;熟悉机床专业标准,便于设计时采用。对机床的用途、特点、主要参数、传动结
第二章 移动通信电波传播与传播预测模型 2.2若某发射机发射功率为100W ,请将其换算成d Bm 和dBW 。如果发射机的天线增益为单位增益,载波频率为900MHz ,求出在自由空间中距离天线100m 处的接收功率为多少dBm ? 解:dBm dBw W 5020100== 自由空间损耗dB D F L 5.71lg 20lg 2045.32=++= 自由空间中距离天线100m 处的接收功率dBm dB dBm 5.215.7150-=-= 2.3若载波 MHz f 8000=,移动台速度h km v /60=,求最大多普勒频移。 解:αλ cos v f d = Hz c vf v f d 4.443600103108001060/8630m ax =?????===∴λ 2.5设载波频率MHz f c 1900=,移动台运动速度s m v /50=,问移动m 10进行电波传播测量时需要多少个样值?在车行驶时进行实时测量需要多少时间?信道的多普勒扩展为多少? 答:①m /17.7940504050个个个接收功率瞬时测量值==λ λ ②s v s t 2.0== ③θλ cos v f =,所以多普勒扩展为 Hz f m 67.316= 2.6若MHz f 800=,h km v /50=,移动台沿电波传播方向行驶,求接收信号的平均衰落率。 解:74508001085.13=???=-A 2.7已知移动台速度h km v /60=,MHz f 1000=,求对于信号包络均方值电平rms R 的电平通过率。
解: ()22ρρπ-?==e f R N m rms R R =ρ, 秒次/2.519 2e 500== ∴πN 2.8设基站天线高度为m 40,发射频率为MHz 900,移动台天线高度为m 2,通信距离为km 15,利用Okumura-Hata 模型分别求出城市、郊区和乡村的路径损耗。(忽略地形校正因子的影响) 解:城市: d f h h f L te re te c p l g )lg 55.69.44(97.4)75.1(lg 2.3lg 82.13lg 16.2655.6921-+---+= 郊区:4 .5)]28[lg(2lg )lg 55.69.44(97.4)75.1(lg 2.3lg 82.13lg 16.2655.69222---+---+=c te re te c p f d f h h f L 乡村: 98.40lg 33.18lg 78.4- lg )lg 55.69.44(97.4)75.1(lg 2.3lg 82.13lg 16.2655.69223---+---+=c c te re te c p f f d f h h f L )(