
4.透平控制系统
4.1 总体描述
透平控制系统操作透平机组给它的子系统,系统产生电气控制信号给透平机组,用于起动、停止负载、卸载、手动或自动及本地控制或远控。
本章描述为一般描述,特殊应用可能与本章描述有所不同。使用本章节内容时可以参照随装置一并提供的软件文档、逻辑图表及电气图表。
4.2 功能描述
基于微处理器的控制系统根据每项使用的输入/输出模块组合的应用而定制。系统控制扫描、监视及数据接收。数据在可编程控制器中处理并发送到输出模块,用于传输到装置的控制单元。
控制系统功能如下:
#顺序
#控制
#保护
#显示
控制盘由电气开关组成,允许命令的输入和状态指示。同时包括显示设备,用于反映控制参数。
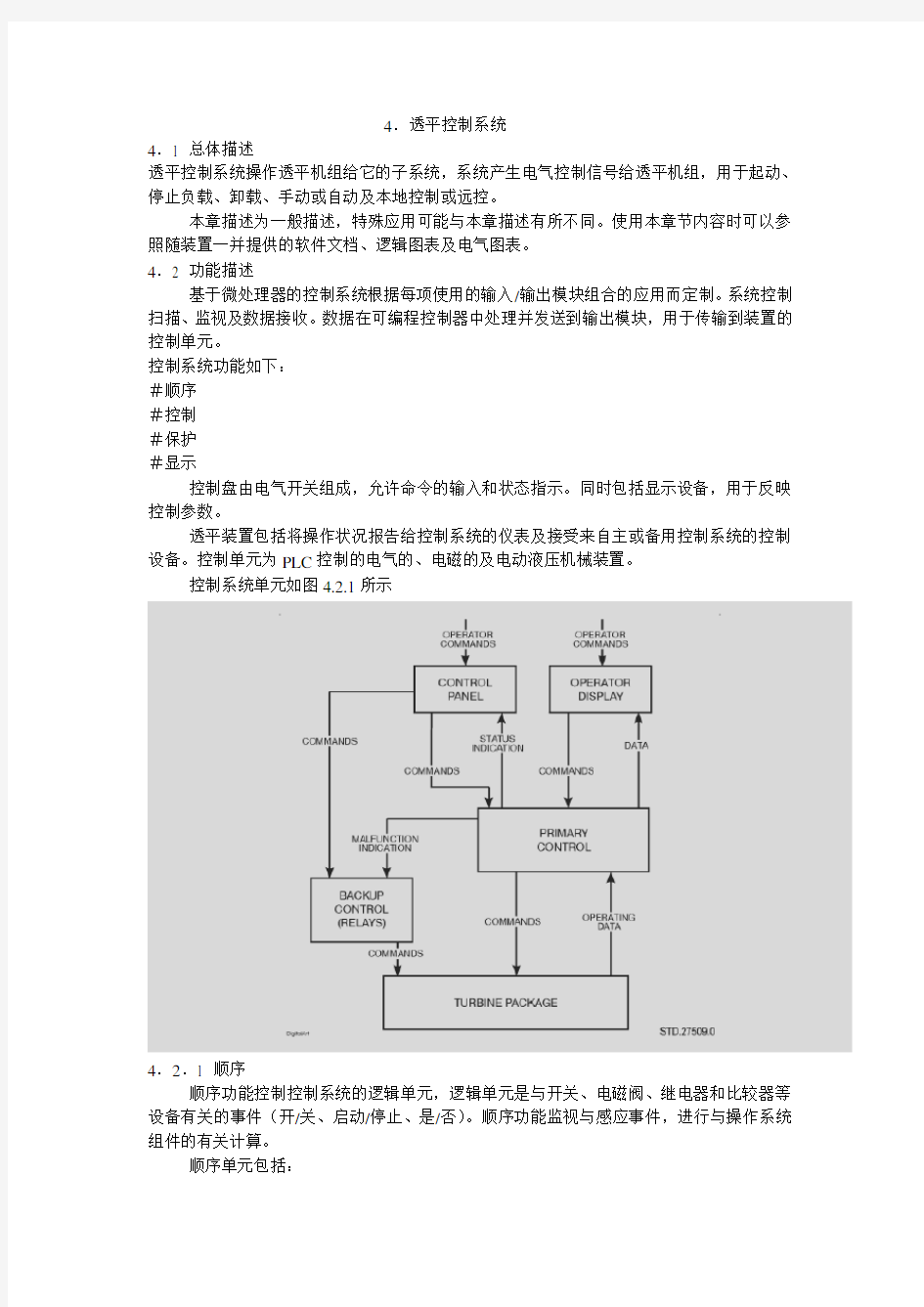
透平装置包括将操作状况报告给控制系统的仪表及接受来自主或备用控制系统的控制设备。控制单元为PLC控制的电气的、电磁的及电动液压机械装置。
控制系统单元如图4.2.1所示
4.2.1 顺序
顺序功能控制控制系统的逻辑单元,逻辑单元是与开关、电磁阀、继电器和比较器等设备有关的事件(开/关、启动/停止、是/否)。顺序功能监视与感应事件,进行与操作系统组件的有关计算。
顺序单元包括:
#起动
#负载
#停止
#后润滑
逻辑图描述了顺序功能。本章使用这些逻辑图进行说明。
起动:
手动起动涡轮机械顺序如下
#系统上电
#故障复位
#选择操作模式
#开始起动
在手动起动开始后,系统完成如下工作:
#燃料阀与润滑压力检查
#吹扫曲柄
#点火
#起动器跳脱
#润滑监视
系统上电
控制系统通过打开电源上电,复位任何报警和关断故障。
复位故障
在起动前,所有的关断故障必须清除,未解决的关断故障将使装置不能起动。“BACKUP RESET”开关给电,按“ACKNOWLEDGE”及“RESET”开关来复位。
选择操作模式
将OFF/LOVAL/REMOTE开关扳到LOCAL或REMOTE位置来选择操作模式。
开始起动
一旦起动开始,控制系统执行润滑与驱动装置系统检查,起动装置风扇,执行燃料关断阀测试与预前曲柄状态检查。
按“START”开关开始起动程序。
燃料阀与润滑压力检查。
预前曲柄检查
预前曲柄检查包括润滑完成与密封系统检查,润滑油压力确定,燃料阀检查程序的完成。当完成预前曲柄检查,起动器马达使发动机盘车。
泵测试与预润滑
当起动/运行锁定后,后润滑备用泵及前/后润滑油泵启动,使之处于测试周期。预润滑定时器开始定时。当运行定时器激活时,如果执行热重启,则预润滑泵测试不能执行。
气体燃料阀及检查
在预润滑检查后,当起动使能锁定,则控制系统执行气体燃料阀的压力测试。每一个阀都将进行测试,确保正确的开关、燃料压力开关及变送器信号可变正常。
压气机系统检查与清洁
干气密封系统
当起动/运行锁定,或者如果压气机机壳加压,密封延迟定时器起动。密封气体电磁阀得电,允许给压缩机密封件加压。在密封延迟定时器超时前,如果密封气体差压没有超过报警设定点,则产生密封气体差压报警。如果密封气体压力小于低关断设定点,同时密封延迟
定时器已超时,则产生密封气体低差压快停锁定关断。
当压缩机机壳压力超出压力开关设定点,机壳压力定时器启动,如果压缩机入口或出口密封气流超出“密封气体流量高”报警设定点,机壳压力定时器超时,产生密封流量高报警。如果压缩机入口或出口密封气流超出“密封气体流量高”关断设定点,同时机壳压力定时器超时,则产生“密封气体流量高”快停锁定关断。
如果由于密封气体系统压力超限而产生关断,则产生附加的密封气体系统失败关断,密封系统失败关断重定位阀门到快停位置。
缓冲空气系统
当起动/运行锁定,或者如果气体压缩机机壳加压,密封延迟定时器重启,缓冲空气允许给压缩机密封件加压。如果在润滑油压力达到设定点之前,缓冲空气差压没有超出低报警设定点,则产生缓冲空气差压“压力低”报警。如果缓冲空气压力小于低关断设定点,则产生“缓冲空气低”差压快停锁定关断。
气体压缩机吹扫与加压
气体压缩机单元用于传送吹扫空气及给气体压缩机机壳管线加压
当压缩机吹扫定时器定时时,压缩机放空阀打开,旁通阀关闭,用于吹扫压缩机及出口管线。
当压缩机吹扫定时器超时,压缩机入口、压缩机出口及压缩机旁通阀打开,当这些阀达到全开位置,压缩机负载阀打开。
气体压缩机阀检查程序用于阀的定位。在阀顺序周期完成时,如果阀位置不正确,单元阀顺序失败,产生故障关断,起动程序被放弃。
吹扫曲柄
在起动器的带动下,吹扫曲柄使发动机盘车,通过透平压缩机的渐强空气流吹扫发动机的空气入口及排气管线的积聚气体。
在一个可扩展的非激活周期内,吹扫曲柄减少旋转,在热重启时,吹扫曲柄强冷却气体透平部件。
当开始吹扫曲柄时,透平起动器激活,曲柄定时器启动,起动器使发动机旋转,发动机速度增加超过预设定值,典型为10~18%。在曲柄定时器超时前,如果发动机没有达到预置值,典型为10~15%,则起动程序放弃,产生曲柄失败报警。
在发动机达到预设定值后(大于曲柄失败速度值),发动机吹扫定时器起动,吹扫周期开始,液体吹扫定时器超时,液体吹扫阀关闭。
发动机加速。吹扫发动机入口及排出管道,吹扫时间由排放量决定,在吹扫曲柄过程中,燃料阀关闭,不点火。当发动机吹扫定时器超时,起动周期继续。
气体燃料的燃烧
燃烧包括火炬点火。燃烧及加速到自我维持速度。
火炬点火(气体燃烧)
发动机T5温度必须小于400F(204C),气体火炬关断点火变压器、点活塞、燃料关断电磁阀,燃料控制命令才可激活。
来自火炬的燃料由点活塞点燃,并进入到发动机。
当T5温度超过400F(204C)而NGP低于起动器脱离速度时,起动计数器增加一次起动计数。
注意
透平设计寿命与第一阶喷嘴(T3)的温度有关。然而,为了提高热电偶的可靠性,测量较低的第三阶喷嘴(T5)。在发动机测试过程中,决定T5及T3值,用于修正所测温度。运行在T3温度下的发动机所测的T5温度称为“Base T5”,这一温度在发动机铭牌上有所描
述。
燃烧(气体燃料)
根据修正的发动机(压气机)速度及温度,燃料控制阀逐渐打开,入口导叶打开,泄放阀逐渐关闭。泄放阀及导叶控制通过透平发动机的空气流量,防止发生喘振。燃料流量增加,T5温度增加,透平动力增加。
如果T5温度在点火定时器超时之前没有超过燃烧温度设定点,则产生点火失败故障,起动程序终止。
加速(气体燃料)
对速度及负载监视,调节控制燃烧阀,以加速发动机,增加T5温度。
在加速期间。如同发动机的速度增加一样,压缩机出口压力(PCD)也在增加。
气体燃料压力必须增加,用以克服PCD压力的增加。随着燃料压力及流量的增加,发动机加速。燃料阀由所选模式、温度及它们之间的关系控制。装置的控制模式包括:#最小燃料量
#超前加速
#T5
#NGP(压气机速度)
图 4.2.2 起动
起动器脱离与加速
当透平速度超过起动器速度,离合器将起动器置于活轮状态。当发动机达到起动器脱离速度时,起动器失去动力,发动机在自己的动力下加速。
在燃烧后,起动失败定时器开始定时,如果在起动失败定时器超时之前,没有达到起动器脱离速度,则产生起动失败关断,发动机关停。
达到起动器脱离速度时,负载失败定时器开始定时。如果在定时器超时之前,发动机没有达到负载设定点,则产生负载失败故障关断。
当NGP大于起动器脱离速度时,检查T5温度传感器。如果个别的T5温度传感器测得的温度超出200F(111C),也就是超出了T5平均温度5秒钟,则产生高差T5故障报警。如果任意一个T5温度传感器测得的温度低于T5平均温度,则产生热电偶故障报警。根据发动机类型,如果两个或者三个T5热电偶测得200F(111C),也就是在预设时间内,持续低于T5平均温度,则产生多T5热电偶故障关断,发动机关闭。
润滑监视
当发动机速度增加时,轴承油压要求增加。为了确保由充足的润滑油,将连续监视油压。
当发动机速度高于起动器脱离速度时,每隔24个小时,由PLC测试后润滑备用泵,使之能够正确操作。如果备用泵不能提供足够的油压的话,则产生备用润滑油泵失败故障报警。
负载
负载功能加速发动机到负载速度,给气体压缩机或者其他驱动设备负载,并控制装置过渡到稳定状态。
通过增机NGP设定点,使发动机加速,动力增加,发动机速度增加。当动力透平速度(NPT)增加超过预置值,典型为60%,NPT锁定。如果NPT降到低于预置值,典型为51%,则产生动力透平低速故障,透平关断。
导叶及泄放阀从起动过渡到基于修正的NGP的操作位置。
处于负载速度时,气体压缩机旁通阀关闭,反喘振控制开始。气体压缩机出口压力增加
停止
透平可在冷却或者快停状态下手动或者自动关断。在关闭燃料前,冷却停止操作压气机空转,使透平冷却。快停立即关闭燃料阀而无冷却周期。
通过激活停止开关或者急停开关,进行气体透平的手动关断。停止开关提供冷却停止,急停开关提供快停,气体压缩机或者其他驱动设备,一旦停止则卸载。对于正常关断,压缩机或者其他驱动装置,在停止之前,负载应减小。
当驱动设备负载状态下发生故障,控制系统将卸载驱动设备,关闭到透平的燃料,控制系统提供冷却停止(锁定或者非锁定)及快速停止(锁定或者非锁定)两种方式。通过探测诸如超温、通风失败。透平低速、低润滑油压等故障,产生故障关断。
当速度降到低于预置值,典型为65%,发动机时间表停止计时。
冷却停止
冷却停止减小发动机的操作速度到空转速度,并起动冷却定时器。当NGP降到低于负载速度时,驱动设备卸载。发动机在空转下运行,直到冷却定时器超时。当冷却定时器超时,到发动机的燃料关闭,一旦发动机停止,溢流定时器超时,起动后润滑周期。
如果在冷却期间再起动,则放弃关断。
快速停止
快速停止负载驱动设备,关闭燃料关断阀,无冷却周期的停止透平。一旦发动机停止,溢流定时器超时,启动后润滑周期。
应急停止
当探测到火焰、备用超速系统失效、PLC失效或者操作员按动ESD开关,都可以激活应急停止(ESD)。ESD停止卸载驱动设备,关闭燃料关断阀,无冷却周期的停止透平。润滑油控制用于透平溢流,后润滑由备用继电器系统控制。
如果启动一个ESD停止,则在重启之前,备用系统必须复位。可通过按动“BACKUP RESET”开关”及“ACKNOWLEDGE”及“RESET”开关实现。
后润滑
当发动机减慢速度时,透平驱动润滑油泵压力减小,交流润滑油泵启动。当发动机停止时,溢流定时器超时,后润滑定时器启动。
如果交流润滑泵不能提供最低压力,备用泵启动。当后润滑定时器超时时,后润滑泵失电。
4.2.2 控制
控制功能监视及调节速度、压力和温度过程变量。在起动、停止和负载期间,功能控制对负载的变化作出反应并控制执行器。
在起动期间,调节燃料流量,确保平滑燃烧及加速。
燃料控制调节发动机动力以维持负载要求、控制发动机速度及T5温度。在负载瞬变期间,燃料控制调节减速及加速,以反应负载条件的变化。
在起动期间,调节泄放阀及导叶位置,减小透平压缩机出口压力(PCD),以避免透平喘振。泄放阀和导叶位置调节发动机和T5温度。在负载瞬变期间,泄放阀和导叶位置调节PCD以避免透平喘振并控制速度。
可选的控制功能包括气体压缩机反喘振和过程控制,这些功能调节气体压缩机速度和输出以满足要求,避免气体压缩机喘振。
燃料控制
透平燃料流量控制调节压力和燃料流量。燃料流量由阀位置控制。通过调节燃料压力和流量,燃料系统建立燃料流量范围,燃料压力被控制到一个比PCD大的值,且处于最大和最小阀位之间。在燃烧、加速、稳定状态和负载状况瞬变期间,控制系统定位阀位,调节燃料流量,以调节发动机速度、动力、T5温度。
起动
在起动期间,燃料流量控制燃料/空气比例,以平滑燃烧及加速到操作速度。维持T5温度及加/减限制,以避免发动机喘振及燃烧室熄火。图4.2.3 说明了起动期间,燃料流量的增加预NGP和PCD增加的比较。
图4.2.3 起动燃料流量
燃烧
燃烧由燃烧上升方案控制,它逐渐打开燃料阀以增加到发动机的燃料流量。
Combustion燃烧
Efficient combustion and acceleration are provided by the start ramp and fuel control schedule, which control engine acceleration.起动斜率及控制发动机加速的燃烧控制方案提供有效的燃烧及加速。
The fuel control acceleration schedule provides fuel to accelerate the engine and maintain a safe margin from engine surge, flameout, and maximum T5 temperature. Fuel schedule is based on Pcd and engine speed.燃料控制加速方案提供燃料,以加速发动机及维持一个安全边界,而不产生发动机喘振、熄火和T5温度最大化。燃料方案基于PCD及发动机速度而定。
Steady State稳定状态
During steady state, fuel regulation operates the gas turbine at the requested power level within operating range limits.在稳定状态期间,燃料调节操作气体透平运行在要求的动力下,且在操作范围内。
The minimum power limit is zero load and occurs when the driven equipment is not loaded. The maximum power limit is established by T5 temperature, engine speed or if so equipped, the gas compressor surge margin. When the T5 temperature or engine speed limit is reached, fuel flow regulation prevents higher power output.最小动力限值为0负载,这时驱动设备不负载。最大动力限值由T5温度、发动机速度或者气体压缩机喘振边界建立。当达到T5温度和发动机速度限制值时,燃料流量调节防止更高的动力输出。
Transient Loads瞬变负载
Fuel flow control responds to transient loads. The response must restore stable operation without surge, flameout, or excessive engine speed. Quick response and stability are provided by the fuel control.燃料流量控制反应瞬变负载。这种反应必须是非喘振、熄火或者过渡超速的稳定操作。燃料控制提供快速反应及稳定性。
During a transient load condition, the fuel control valve may reach the maximum or minimum position. As the control system fuel limit may not provide sufficient flameout margin under all conditions, a minimum fuel function is used (Figure 4.2.4).在瞬变负载状态期间,燃料控制阀可能达到最大或者最小位置。当在所有条件下,控制系统燃料限制可能不能提供充分的熄火边界裕量时,则使用最小燃料功能。
The minimum fuel function limits fuel control valve closing based on flameout characteristics of the engine as a function of fuel mode, T1, and engine speed. 基于燃料模式功能之一的发动机熄火特性、T5及发动机速度等因素,最小燃料功能限制燃料控制阀的关闭。
图4.2.4 燃料流量限制
BLEED VALVES泄放阀
Bleed valve position control regulates Pcd by routing airflow to the exhaust, bypassing combustor and turbine.通过建立到排出口的空气流路径,旁通燃烧室及透平,泄放阀阀位控制压缩机出口压力PCD。
During start and acceleration, the bleed valve avoids engine surge. During start and acceleration, the bleed valve is opened to allow airflow to bypass combustor and turbine. An open bleed valve reduces turbine compressor backpressure and avoids engine surge.在起动及加速期间,泄放阀避免发动机喘振。在起动及加速期间,泄放阀打开以允许空气流旁通掉燃烧室及透平,打开的泄放阀将减小透平压缩机的背压力,避免发动机喘振。
GUIDE VANE SYSTEMS导叶系统
Airflow through the turbine compressor is regulated by controlling angular position of variable geometry inlet guide vanes.控制可变形状的入口导叶系统的角度,来控制通过透平压缩机的空气流。
Guide vanes maximize gas turbine compressor performance and avoid surge during start and acceleration. 导叶系统使透平压缩机性能最大化,避免在
起动和加速期间喘振。
During start and acceleration, guide vane position is determined by engine speed.在起动和加速期间,导叶位置由发动机速度决定。
GAS COMPRESSOR PROCESS CONTROL气体压缩机过程控制
Process control is a function of gas compressor speed and (yard) valve position. The fuel control system regulates engine speed to maintain the process variable setpoint.过程控制是气体压缩机速度和阀位的功能控制。燃料控制系统调节发动机速度以维持过程变量设定点。
Process control may operate on one or more of the following process variables:过程控制可以操作以下变量:
?Discharge pressure出口压力
?Suction pressure入口压力
?Suction flow入口流量
Process Control过程控制
The process control system (Figure 4.2.5) senses a process variable, (for example suction or discharge pressure), determines control mode, and generates a signal to the fuel system to set engine speed. If the control variable setpoint cannot be achieved by engine speed changes, the recycle valve is opened.过程控制系统(图 4.2.5)监视过程变量,(比如出入口压力),决定控制模式,产生信号给燃料系统以设置发动机速度。如果控制变量设定点不能由发动机速度变化完成,则打开循环阀。
Figure 4.2.5 Process Control System Diagram
图4.2.5 过程控制系统图
Figure 4.2.6 shows process control functions and selectors that set Ngp based on demand and range limits. The mnemonics used may differ slightly for specific applications, for example NGPEXT may be written NGP_EXT.图4.2.6展示了过程控制功能及基于要求与范围限制而设置的NGP的选择器。符号可能对于特殊应用而有所不同。例如,NGPEXT可能写作NGP_EXT。
4.2.3 Protect保护
The protect function monitors turbomachinery operating limits and protects against damage from component or system malfunctions. The protect function monitors operating conditions. When a limit is exceeded, the control system annunciates the fault and initiates a stop, if the fault is a shutdown-type malfunction. A backup relay system protects against PLC failure, fire, or power turbine overspeed. The relay system is also activated by a manual emergency stop.保护功能监视透平机组操作限制,防止由于组件或者系统故障而造成机组损坏。保护功能监视操作状况。当超限时,如果故障属于关断类型的故障,则控制系统发出故障警告并启动停止程序。备用继电器系统防止PLC失效、火灾或者动力透平超速。继电器系统也可由手动急停开关激活。
The protect function performs malfunction alarms, shutdowns and backup shutdowns. Specific alarms (AL) and shutdowns (SD) are in the info file listing in the Turbotronic Software Documentation.保护功能执行故障报警、关断和备用关断。透平软件文档的信息列表中已列出特征报警(AL)及关断(SD)。
Malfunctions are annunciated and displayed on a list in the alarm display. Alarms are displayed in the sequence and category in which they occur.故障告知并显示在报警列表中。报警显示在它们发生的程序及类中。
MALFUNCTION ALARM故障报警
The alarm task detects when a condition changes from normal to a level of concern. It annunciates the problem to communicate that corrective action is required.报警程序检测从正常状态到非正常状态的条件变化。提醒出现的问题应采取必要的措施加以解决。
MALFUNCTION SHUTDOWN故障关断
The shutdown task detects when a danger level is reached or a major malfunction occurs. A shutdown is initiated and the problem is annunciated.
关断程序检测达到危险等级或者严重故障的发生。启动关断程序并告知存在的问题。
Shutdowns are one of four types, depending on the severity of the malfunction and urgency to stop the turbomachinery. Table 4.2.1 summarizes the shutdown types and the codes which identify them in drawings and displays.根据故障的严重程度和机械停止的急迫性,关断为四种装置关停的一种。表4.2.1归纳了关断类型和代码,可在图中和显示信息中加以区分。
Table 4.2.1 Shutdown Abbreviations
表4.2.1 关断分类
Fast Stop vs Cooldown快速停止与冷却停止
The cooldown stop unloads the driven equipment and allows the engine to idle for a cooldown period before shutting off fuel. The malfunction fast stop immediately shuts off fuel and unloads the driven equipment.冷却停止卸载驱动设备,允许发动机在燃料关断之前的冷却周期内空转。故障快速停止立即切断燃料供给同时卸载驱动设备。
Lockout vs Nonlockout闭锁与非闭锁
The lockout malfunction inhibits control system operation. The control system cannot initiate a start until the malfunction is reset.
Lockout-type malfunctions are generally more severe and require attention before the system can be restarted.闭锁故障禁止控制系统操作,控制系统不能启动,直到故障复位为止。闭锁典型故障通常更严重,在系统重启之前需要谨慎。
Nonlockout malfunctions typically result from an operation disruption or an abnormal condition. Nonlockout malfunctions can be reset when conditions return to normal非闭锁故障典型的来自于操作干扰和非正常状况。当状态恢复正常时,非闭锁故障可以被复位。
Cooldown Stop Nonlockout冷去停止非闭锁
Cooldown stop nonlockouts include normal stops as well as stops responding to alarms not serious enough to cause immediate damage. These conditions include operation out of sequence, or a momentary out of limit condition.冷却停止非闭锁包括正常停止,同时反映的报警并不严重到引起立即的损伤。这些状态包括非顺序操作或者一段时间内的超限状态。
These conditions include reaching temperature and pressure limits with lube oil, air filter and if so equipped, gas compressor suction and discharge lines, or a failure to load. Some of these conditions must be corrected before operation is resumed.这些状态包括润滑油温度及压力达限、空气过滤器、气体压缩机入口与出口管线或者负载失败。这些状态中的一些在重启之前必须加以纠正。
Cooldown Stop Lockout冷却停止闭锁
Cooldown stop lockouts respond to conditions that may not exceed shutdown levels but indicate a component has failed.冷却停止闭锁反应了一些不超过关断值但表明某一部件已经失效的状态。
Cooldown stop lockout malfunctions include:冷却停止闭锁故障包括:?sensor failure传感器失效
?lube tank level low润滑油罐液位低
?lube tank overpressure润滑油罐过压
Fast Stop Nonlockout快速停止非闭锁
Fast stop nonlockouts respond to conditions that can cause damage if operation continues. The conditions are caused by a momentary disturbance in the system or an occasional sequencing related malfunction.快速停止反应了一些如果继续操作会引起损伤的状态。系统内的短时干扰或者与故障有关的偶然性顺序错误引起此类状态。
Momentary conditions typically include engine overspeed, flameout, high vibration (engine, gas compressor, or gas coolers), high compressor or cooler discharge temperature, or high/low scrubber level.短时状态包括发动机超速、熄火、高振动值(发动机、气体压缩机或者气体冷却器)、高压缩机或者冷却器出口温度、高低洗涤器液位。
Sequencing-related malfunctions include fail to crank, ignition fail, fuel valve check fail, yard valve fail, and prelube fail.与顺序有关的故障包括曲柄失效、点火失败、燃料阀检查失败、YARD阀失效、预润滑失败。
Fast Stop Lockout快速停止闭锁
Fast stop lockouts respond to conditions that can cause serious damage if operation continues. Investigation for damage is required. Corrective action may be required before restart.快速停止闭锁反应一些如果继续操作将引起严重损伤的状态。需要进行损伤调查。在重启之前。可能要采取正确的措施。
These conditions include high bearing temperatures, high T5 temperature, node failure, transmitter failures, and if so equipped, gas compressor seal system failure.这些状态包括高轴承压力、高T5温度、节点失效、变送器失效、气体压缩机密封系统失效。
BACKUP ACTIVE SHUTDOWN备用激活关断
The backup active shutdown is enabled if there is a microprocessor failure, fire, backup overspeed, or manually initiated Emergency Shutdown (ESD). The backup system immediately shuts off fuel, opens yard valves to eliminate driven equipment load, and controls lubrication oil for engine rolldown and postlube.如果处理器失效、火灾、备用超速或者手动启动急停开关(ESD)都将使能备用激活关断。备用系统立即切断燃料供应,打开YARD阀,减小驱动设备负载,控制润滑油为发动机盘车提供润滑及后润滑。
After a backup active shutdown, the backup system must be reset with the BACKUP RESET keyswitch. The ACKNOWLEDGE and RESET switches must be pressed before the package can be restarted.备用系统激活关断后,备用系统必须使用“BACKUP RESET”开关复位。在装置重启之前必须按“ACKNOWLEDGE”和“RESET”开关。
Microprocessor Fail微处理器故障
A microprocessor fail malfunction is detected by the controller. When microprocessor failure is detected, a fast stop is initiated and backup control is activated. Fuel valves and guide vanes are closed, the bleed valve is opened, and the gas driven equipment is unloaded. The backup
system controls lubrication oil for engine rolldown and postlube.控制器检测微处理器故障。当检测到微处理器故障后,启动快速停止,激活备用控制系统,燃料阀和导叶关闭,泄放阀打开,气体驱动设备卸载,备用控制系统控制润滑油,用于发动机盘车及后润滑。
Manual Emergency Stop手动急停
The manual emergency stop is initiated by depressing the local, remote, or skid-mounted emergency stop switch. When the stop is initiated, the start/run latch in the microprocessor is reset and the fast stop latch in the backup control is set. Fuel valves and guide vanes are closed and the bleed valve is opened. The backup system controls lubrication oil for engine rolldown and postlube.按动本地、远程或者滑道安装型应急停止开关,启动手动应急停止程序。当启动停止程序后,微处理器中的启动/运行锁定复位。备用控制系统控制润滑油用于发动机盘车及后润滑。
Fire Detected火焰探测
When fire is detected, the backup system immediately sets the fast stop latch in backup control. The shutdown sequence proceeds as with the manual emergency stop except enclosure fans, if present, are stopped, and lube continues for engine rolldown. If the PLC is functioning after the
20-minute hold, a postlube cycle is completed.当探测到火焰时,备用控制系统立即在备用控制系统中设置快速停止闭锁。手动急停时,除机箱风扇外,关断程序停止,润滑油提供发动机盘车。在20分钟后,如果PLC功能正常,则后润滑完成。
Turbine Backup Overspeed透平备用控制超速
The turbine overspeed malfunction is sensed by the backup overspeed detection module. The magnetic pickup speed sensor is independent from primary control sensor. The backup overspeed monitor detects overspeed that indicates the normal control and protect systems are not operating. When overspeed is detected, the fast stop latch in the backup control is set and the stop sequence proceeds as with manual emergency stop.备用控制超速检测模块检测透平超速故障。电磁选择速度传感器独立于主控制的传感器。备用控制超速监视器检测超速。这些超速表明正常控制与保护系统不能够操作。当检测到超速时,同手动急停一样,备用控制系统设置快速停止闭锁和停止程序。
4.2.4 Display显示
The display function provides the information through the display device. The display device allows operating condition monitoring and limited turbine control functions. The display device may provide historical as
well as current information.显示功能通过显示设备提供信息。显示设备允许操作状态监视及限制透平控制功能。显示设备可以提供历史和当前信息。
4-1将下述特征方程化为适合于用根轨迹法进行分析的形式,写出等价的系统开环传递函数。 (1)210s cs c +++=,以c 为可变参数。 (2)3(1)(1)0s A Ts +++=,分别以A 和T 为可变参数。 (3)1()01I D P k k s k G s s s τ?? ++ + =? ?+? ? ,分别以P k 、I K 、T 和τ为可变参数。 4-2设单位反馈控制系统的开环传递函数为 (31)()(21) K s G s s s += + 试用解析法绘出开环增益K 从0→+∞变化时的闭环根轨迹图。 4-2已知开环零极点分布如下图所示,试概略绘出相应的闭环根轨迹图。 4-3设单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标)。 (1)()(0.21)(0.51)K G s s s s = ++ (2)(1)()(21) K s G s s s +=+ (3)(5)()(2)(3) K s G s s s s += ++ 4-4已知单位反馈控制系统的开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求算出起始角)。 (1)(2) ()(12)(12) K s G s s s j s j += +++- (2)(20) ()(1010)(1010) K s G s s s j s j +=+++-
4-5设单位反馈控制系统开环传递函数如为 * 2 ()()(10)(20) K s z G s s s s += ++ 试确定闭环产生纯虚根1j ±的z 值和*K 值。 4-6已知系统的开环传递函数为 * 2 2 (2)()()(49) K s G s H s s s += ++ 试概略绘出闭环根轨迹图。 4-7设反馈控制系统中 * 2 ()(2)(5) K G s s s s = ++ (1)设()1H s =,概略绘出系统根轨迹图,判断闭环系统的稳定性 (2)设()12H s s =+,试判断()H s 改变后的系统稳定性,研究由于()H s 改变所产生的影响。 4-8试绘出下列多项式的根轨迹 (1)322320s s s Ks K ++++= (2)323(2)100s s K s K ++++= 4-9两控制系统如下图所示,试问: (1)两系统的根轨迹是否相同?如不同,指出不同之处。 (2)两系统的闭环传递函数是否相同?如不同,指出不同之处。 (3)两系统的阶跃响应是否相同?如不同,指出不同之处。 4-10设系统的开环传递函数为 12 (1)(1) ()K s T s G s s ++= (1)绘出10T =,K 从0→+∞变化时系统的根轨迹图。 (2)在(1)的根轨迹图上,求出满足闭环极点阻尼比0.707ξ=的K 的值。 (3)固定K 等于(2)中得到的数值,绘制1T 从0→+∞变化时的根轨迹图。 (4)从(3)的根轨迹中,求出临界阻尼的闭环极点及相应的1T 的值。 4-11系统如下图所示,试 (1)绘制0β=的根轨迹图。 (2)绘制15K =,22K =时,β从0→+∞变化时的根轨迹图。 (3)应用根轨迹的幅值条件,求(2)中闭环极点为临界阻尼时的β的值。
电子控制系统的组成和工作过程 一、教学分析 1.教材分析 本课是第一章第二节“电子控制系统的组成和工作过程”。从对比分析两种路灯控制系统的基本组成入手,再通过搭接一个路灯自动控制的电子模型,来学习电子控制系统的基本组成和工作过程,从而为学生学习后面各章提供了一把钥匙。 2.学情分析 学生在通用技术必修2的学习中,已学过关于控制系统的一些概念,例如输入、控制、输出,以及功能模拟方法的含义,但对电子控制系统内部电子元件,例如发光二极管、光敏电阻、三极管等的工作原理不太了解,教师可用通俗的语言补充解释其作用,以利于学生的学习。 二、教学目标 1.知识与技能目标 (1)知道电子控制系统的基本组成。 (2)能用方框图分析生活中常见电子控制系统的工作过程。 2.过程与方法目标 (1)通过对两种路灯控制系统方框图的对照,知道电子控制系统的基本组成。 (2)通过搭接一个路灯自动控制的电子模型,加深对电子控制系统组成的理解。 3.情感态度和价值观目标 (1)激发学生动手尝试的兴趣和热爱技术的情感。 (2)提高学生比较及分析电子控制系统的能力。 三、教学重难点 1.重点 (1)电子控制系统的基本组成。 (2)能用方框图分析生活中常见电子控制系统的工作过程。 2.难点 电子控制系统内部常见电子元件的工作原理。 四、教学策略 本节课程以多媒体技术为辅助教学手段,通过观察、基本知识讲授、小组探究、分析表达、技术试验、能力展示等教学方法和策略,在教师指导下,通过学生自主探究建构知识和技能。 五、教学准备 通用技术专用教室、多媒体、课件、路灯自动控制模型。 六、课时安排 共1课时 七、教学过程 (一)新课导入 教师展示:路灯自动控制模型 板书:第一章电子控制系统概述 第二节电子控制系统的组成和工作过程
学号:0120918950930 课程设计 题目电镀生产线控制系统 学院物流工程学院 专业 班级 姓名 指导教师 2013年1月2日
本科生课程设计成绩评定表 指导教师签字: 2013年 01 月 18 日
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 电镀生产线控制系统 一、初始条件 程序运行设备:西门子S7-300 PLC 二、要求完成的主要任务 1.控制要求:实现手动、单周期、连续、单步四种工作方式的控制。以四种工作方式进行上行、下行、右行、左行四种运动,来实现清洗、风干、电镀、定时四种过程的电镀工作。 2.设计要求: (1)绘制PLC接线图; (2)给出符号定义表; (3)编写控制程序; (4)上机验证通过程序调试。 3.课程设计说明书应包括: (1)设计的目的及意义 (2)设计任务及要求 (3)设计方案比较及认证 (4)程序设计:软件思想,流程图,程序说明 (5)调试过程记录及结果分析 (6)参考资料 (7)总结
三、时间安排: 四、主要参考资料 【1】张晓川编著.仓储物流技术与装备[M].化学工业出版社,2003年 【2】邓星钟主编.机电传动控制[M].华中科技大学出版社,2001年 【3】朱宏辉.物流自动化系统设计及应用.化学工业出版社,2004 【4】刘锴编著.深入浅出西门子S7-300PLC[M].北京航空航天大学出版社,2004年 【5】廖常初编著.S7-300/400PLC应用技术[M].机械工业出版社,2008年【6】王永华编.现代电器控制及PLC应用技术[M].北京航天航空大学出版社,2007年 指导教师签名: 2013年1月6日 系主任(或责任教师)签名: 2013年1月6日
习题四 4.1双闭环调速系统的ASR 和ACR 均为PI 调节器,设系统最大给定电压 *nm U =15V ,转速调节器限幅值为*im U =15V , n N =1500r/min ,N I =20A ,电流过载倍数为2,电枢回路总电阻R =2Ω,s K =20,e C =0.127V·min/r ,求:(1)当系统稳 定运行在*n U =5V ,dL I =10A 时,系统的n 、n U 、*i U 、i U 和c U 各为多少?(2) 当电动机负载过大而堵转时,*i U 和c U 各为多少? 解: (1)150.01min/1500/min nm N U V V r n r α= == 5500/min 0.01min/n U V n r V r α = = = *150.375/40im dm U V V A I A β=== *0.37510 3.75i d U I V β==?= 0.37510 3.75i d U I V β==?= 0.127500102 4.17520 e d c s C n I R U V K +?+?= == (2)堵转时,V I U dm i 15*==β, 0.1270402 420 e d c s C n I R U V K +?+?= == 4.2 在转速、电流双闭环调速系统中,两个调节器ASR ,ACR 均采用PI 调节器。已知参数:电动机:N P =3.7kW ,N U =220V ,N I =20A ,N n =1000 r/min ,电 枢回路总电阻R =1.5Ω,设cm im nm U U U ==* * =8V ,电枢回路最大电流dm I =40A,电力电子变换器的放大系数s K =40。试求: (1)电流反馈系数β和转速反馈系数α。 (2)当电动机在最高转速发生堵转时的,0d U c i i U U U ,,*值。 解:1)* 80.32/40im dm U V V A I A β===
5-1 什么是专家系统?它具有哪些特点和优点? 专家系统(Expert System) 是一个智能计算机程序系统,其内部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的方法来处理该领域问题。也就是说,专家系统是一个具有大量的专门知识与经验的程序系统,它应用人工智能技术和计算机技术,根据某领域一个或多个专家提供的知识和经验,进行推理和判断,模拟人类专家的决策过程,以便解决那些需要人类专家处理的复杂问题。简而言之,专家系统是一种模拟人类专家解决领域问题的计算机程序系统。 专家系统的特点如下: (1)启发性。不仅能使用逻辑知识,也能使用启发性知识,它运用规范的专门知识和直觉的评判知识进行判断、推理和联想,实现问题求解; (2)透明性。它使用户在对专家系统结构不了解的情况下,可以进行相互交往,并了解知识的内容和推理思路,系统还能回答用户的一些有关系统自身行为的问题; (3)灵活性。专家系统的知识与推理机构的分离,使系统不断接纳新的知识,从而确保系统内知识不断增长以满足商业和研究的需要; (4)实用性。可长期保存人类专家的知识与经验,且工作效率高、可靠性好、能汇集众多专家的特长,达到高于任何单个专家的水平,是保存、传播、使用及提高专家知识与经验的有效工具; (5)符号操作。与常规程序进行数据处理和数字计算不同,专家系统强调符号处理和符号操作。使用符号表示知识,用符号集合表示问题的概念,一个符号是一串程序设计,并可用于表示现实世界中的概念; (6)不确定性推理。领域专家求解问题的方法大多数是经验性的,经验知识一般用于表示不精确性且存在一定概率的问题。此外,其提供的有关信息往往是不确定的。而专家系统能够综合应用模糊和不确定的信息与知识进行推理; 专家系统的优点如下: (1)专家系统能够高效率、准确、周到、迅速和不知疲倦地进行工作; (2)专家系统解决实际问题时不受周围环境的影响,也不可能遗漏忘记; (3)军事专家系统的水平是一个国家国防现代化的重要标志之一;
如图所示是JN6201集成电路鸡蛋孵化温度控制器电路图,根据该原理图完成1~3题。 1.该电路图作为控制系统的控制(处理)部分是IC JN6201,当JN6201集成输出9脚长时间处于高电平,三极管V2处于截止状态,继电器释放,电热丝通电加热。 2.安装好调试时,先将温度传感器Rt1放入37℃水中,调整电位器Rp1,使继电器触点J-2吸合,再将温度传感器Rt2放入39℃水中,调整Rp2,使继电器触点J-2释放。 3.调试时发现,不管电位器Rp1和Rp2怎么调,继电器J 始终吸合,检查电路元器件安装和接线都正确,用万用表测三极管V2集电极电位,在不同的调试状态分别为2.8V 和0V ,可知电路发生故障的原因是( B ) A.二极管V6内部断路 B.三极管V3内部击穿(短路) C.电阻R4与三极管V3基极虚焊 D.继电器线圈内部短路 如图所示是运算放大器鸡蛋孵化温度控制器电路图,根据该原理完成4~6题。 4.该电路作为控制系统的输出部分是继电器J 、电热丝等,当电路中集成运放2脚的电位低于3脚的电位,三极管V3处于饱和状态,继电器J 吸合,电热丝通电加热。 上限 V2饱和导通时候Uce 电压降0.2V ,所以留下来给集电极2.8V ,截止时候0V
5.安装好后调试时,将温度传感器Rt 放入39℃水中,调R4,使电压U2=U3,集成运放输出端6脚的电压为0V ,电路实现39℃单点温度控制。 6.调试时发现,将温度传感器Rt 放入高于39℃水中,继电器吸合;将温度传感器Rt 放入低于39℃水中,继电器释放,出现该故障现象的原因可能是( A ) A.集成运放2脚与3脚接反 B.二极管V4接反 C.电阻R2断路 D.三极管V3损坏 如图所示是晶体管组成的水箱闭环电子控制系统电路,根据该原理图完成7~9题。 7.该电路作为控制系统被控对象的是水箱内的水,水箱的水位从a 点降到b 点的过程中,三极管V1处于饱和状态,三极管V2处于截止状态,继电器触点J-1处于吸合状态。 8.安装调试时,将三个水位探头按图中的高低放入空玻璃杯中,如果电路正常,电路通电后,继电器J 吸合;向玻璃杯中加水,到达a 点时,继电器J 释放;接着将玻璃杯中的水排出,水位降到b 点以上时,继电器J 释放;水位降到b 点以下时,继电器J 吸合。 9.调试时发现,玻璃杯中的水位在b 点以下时,继电器J 就吸合;水位加到b 点,继电器J 就释放。出现该故障现象的原因是( D ) A.继电器J 没用 B.三极管V1损坏 C.二极管V3接反 D.电路没接J-1触点,b 点直接接到了电阻R1 如图所示是555集成电路组成的水箱水位闭环电子控制系统电路图, (第4~6题) (第7~9题) R4 10k ?R5 4.7k R3 4.7k
白车身生产线控制系统设计及实施 本文阐述了如何在工艺基础上实现对宝骏汽车白车身焊接生产线的生产控制系统进行硬件和软件设计.该 控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的. 本文阐述了如何在工艺基础上实现对宝骏汽车白车身焊接生产线的生产控制系统进行硬件和软件设计。该控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的。 宝骏白车身生产线工艺流程 宝骏白车身生产线主体由前车体、下车体、总拼、左右侧围、空中主夹具、机器人及顶盖分拼、空中输送自行小车和升降机构成。前车体即发动机舱生产线,发动机舱完成后,由空中输送自行小车送至下车体的1#工位,3台自行小车分别将前地板、后车架送至下车体1#工位,形成宝骏汽车的底板。在1#工位完成焊接后,输送机构由主气缸顶起,变频器控制输送电动机前进,到2#工位落下夹具夹紧,开始新一轮的焊接。焊接完成后操作人员同时按下工作完成按钮,输送机构再次顶起,如此循环动作,一直持续到最后一个工位。 总拼的第一个工位定义为转运拼台,通常在这个工位罕有电动或气动的控制,7#为顶盖添加和焊接工位,在这个工位采用FANUC的机械手进行自动焊接,同时在车身底边的区域采用伺 服自动焊进行焊接,经过后面几个拼台的补焊后,到达最后一个工位,白车身总成由升降机转移到涂装车间的入口等待喷涂。到此为止,车身车间的工艺制作完成。 本文在工艺基础上实现对宝骏汽车白车身焊接生产线的自动控制。该控制系统的最大特点在于电气控制和气动控制相结合,通过电气元件驱动气动的控制阀岛,达到气动控制自动化的目的。控制方式通过全自动以及半自动的方式实现,软、硬件也分别进行了设计,在硬件部分主要考虑了设备的选型,包括PLC的选择,总线选择的设计等,PLC的型号及容量是重点考虑内容;其次是现场总线的选择,现场总线不光要完成系统的要求,还要更好地避免工业现场的各种干扰,使各个模块之间的通信安全稳定。为了保证生产线的安全性,我们在每个工位配置了一定数量的传感器,包括光栅、激光扫描以及光幕等,全面保障了焊接工人的人身安全和生产线的安全运行。软件部分主要专注于根据工艺的要求进行程序代码的编写。
第1章自动控制系统的基本概念 内容提要: 本章通过开环与闭环控制具体实例,讲述自动控制系统的基本概念(如被控制对象、输入量、输出量、扰动量、开环控制系统、闭环控制系统及反馈的概念)、反馈控制任务、控制系统的组成及原理框图的绘制、控制系统的基本分类、对控制系统的基本要求。 1.1 概述 在科学技术飞速发展的今天,自动控制技术起着越来越重要的作用。所谓自动控制,是指在没有人直接参与的情况下,利用控制装置使被控对象(机器设备或生产过程)的某个参数(即被控量)自动地按照预定的规律运行。例如,数控车床按照预定程序自动地切削工件,化学反应炉的温度或压力自动地维持恒定,人造卫星准确地进入预定轨道运行并回收,宇宙飞船能够准确地在月球着陆并返回地面等,都是以应用高水平的自动控制技术为前提的。 自动控制理论是控制工程的理论基础,是研究自动控制共同规律的技术科学。自动控制理论按其发展过程分成经典控制理论和现代控制理论两大部分。 经典控制理论在20世纪50年代末已形成比较完整的体系,它主要以传递函数为基础,研究单输入、单输出反馈控制系统的分析和设计问题,其基本内容有时域法、频域法、根轨迹法等。 现代控制理论是20世纪60年代在经典控制理论的基础上,随着科学技术的发展和工程实践的需要而迅速发展起来的,它以状态空间法为基础,研究多变量、变参数、非线性、高精度等各种复杂控制系统的分析和综合问题,其基本内容有线性系统基本理论、系统辨识、最优控制等。近年来,由于计算机和现代应用数学研究的迅速发展,使控制理论继续向纵深方向发展。目前,自动控制理论正向以控制论、信息论、仿生学为基础的智能控制理论深入。 1.2 自动控制的基本方式 在工业生产过程中,为了提高产品质量和劳动生产率,对生产设备、机器和生产过程需要进行控制,使之按预定的要求运行。例如,为了使发电机能正常供电,就必须使输出电压保持不变,尽量使输出电压不受负荷的变化和原动机转速波动的影响;为了使数控机床能加工出合格的零件,就必须保证数控机床的工作台或者刀架的位移量准确地跟随进给指令进给;为了使加热炉能保证生产出合格的产品,就必须对炉温进行严格的控制。其中,发电机、机床、加热炉是工作的机器装备;电压、刀架位移量、炉温是表征这些机器装备工作状态的物理参量;额定电压、进给的指令、规定的炉温是在运行过程中对工作状态物理参量的要求。 被控制对象或对象:将这些需要控制的工作机器装备称为被控制对象或对象,如发电机、机床。
第7章 专家控制系统 教学内容 首先介绍专家系统基本概念、特征、组成以及基本类型。。然后讲授专家控制系统的工作原理,最后介绍了建立专家系统的步骤和专家控制器。 教学重点 1.专家系统的概念,即它是一种模拟人类专家解决领域问题的计算机程序系统。将专家系统同控制理论和技术相结合,对系统进行控制形成专家控制系统。把专家系统作为控制器称为专家控制器。专家系统的基本组成,即由知识库、推理机、解释接口等组成。 2.专家控制系统工作原理。专家系统设计的基本步骤:认识和阶段化概念,实现阶段,获取知识、构造外部知识库,调试和检验阶段。 教学难点 专家系统的工作原理、知识的表示和获取,专家系统的设计。 教学要求 1.了解专家系统的概念,理解专家控制系统、专家控制器的概念。 2.掌握专家系统的特征、组成和基本类型。 3.理解专家控制系统的工作原理。知识的表示和获取。 4.掌握建立专家系统的步骤。 5.了解专家控制器的组成,专家控制器的设计原则。 7.1 概述 7.1.1 专家系统的起源与发展 人工智能科学家一直在致力于研制在某种意义上讲能够思维的计算机软件,用以“智能化”的处理、解决实际问题。60年代,科学家们试图通过找到解决多种不同类型问题的通用方法来模拟思维的复杂过程,并将这些方法用于通用目的的程序中。然而事实证明这种“通用”程序处理的问题类型越多,对任何个别问题的处理能力似乎就越差。后来,科学家们认识到了问题的关键即计算机界程序解决问题的能力取决于它所具有的知识量的大小。为使一个程序智能化,必须使其具有相关领域的大量高层知识。为解决某具体专业领域问题的计算机程序系统的开发研制工作,导致专家系统这一新兴学科的兴起。 从本质上讲,专家系统是一类包含着知识和推理的智能计算机程序,其内部含有大量的某个领域专家水平的知识和经验,能够利用人类专家的知识和解决问题的方法来处理该领域的问题。 1965年斯坦福大学开始建立用于分析化合物内部结构的DENTRAL系统,首先使用了“专家系统”的概念。70年代末,该校又研制成功了著名的医疗系统MYCIM和用于矿藏勘探的PROSPECTOR系统,推动了专家系统的开发研究和应用。80年代,专家系统的研究开发进入了高潮,应用范围涉及到工业、农业、国防、教育及教学、物理、控制等许多领域。在控制系统辅助设计、故障诊断和系统控制等方面得到了推广应用。专家系统的研究发展,促进了人工智能科学的进步,也使专家系统本身成为人工智能科学的一个重要分支领域。
第4章思考题与习题 1.基本练习题 (1)什么是被控过程的特性?什么是被控过程的数学模型?为什么要研究过程的数学模型?目前研究过程数学模型的主要方法有哪几种? 答: 1)过程控制特性指被控过程输入量发生变化时,过程输出量的变化规律。 2)被控过程的数学模型是描述被控过程在输入(控制输入与扰动输入)作用下,其状态和输出(被控参数)变化的数学表达式。 3)目的: ○1设计过程控制系统及整定控制参数; ○2指导生产工艺及其设备的设计与操作; ○3对被控过程进行仿真研究; ○4培训运行操作人员; ○5工业过程的故障检测与诊断。 4)机理演绎法和实验辨识法。 (2)响应曲线法辨识过程数学模型时,一般应注意哪些问题? 答: 1)合理地选择阶跃输入信号的幅度,幅值不能过大以免对生产的正常进行产生不利影响。但也不能太小,以防其他干扰影响的比重相对较大而影响试验结果。一般取正常输入信号最大幅值的10%; 2)试验时被控过程应处于相对稳定的工况; 3)在相同条件下进行多次测试,消除非线性; 4)分别做正、反方向的阶跃输入信号试验,并将两次结果进行比较,以衡量过程的非线性程度; 5)每完成一次试验后,应将被控过程恢复到原来的工况并稳定一段时间再做第二次试验。 (3)怎样用最小二乘法估计模型参数,最小二乘的一次完成算法与递推算法有何区别? 答: 1)最小二乘法可以将待辨识过程看作“黑箱”。利用输入输出数据来确定多项式的系数利用) h k e =θ来确定模型参数。 k T+ ) ( (y k ( ) 2)区别:一次完成要知道所有的输入输出数据才能辨识参数,即只能离线辨识。递推算法可以只知道一部分数据即进行辨识,可用于在线辨识。
基于PLC的电镀生产线控制系统设计 摘要 本文探讨了如何利用德国西门子PLC S7-200进行自动化电镀生产线控制,在本次设计中,我们从自动控制技术器件在国内的应用前景及电镀生产线生产现场的环境来考虑,以使该生产线真正具备自动生产运行为目的,制定了采用在当前及以后都应用广泛且能适应多种环境的可编程控制器来控制整个整个工作流程的方案。重点分析了系统软硬件设计部分,并给出了系统硬件接线图、PLC控制I/O 端口分配表以及整体程序流程图等,实现了电镀生产自动化,提高了生产效率,降低了劳动强度。为适应现代传统的工业控制系统,我们还采用了基于组态王软件的系统作为上位机,配合下位机PLC完成了该系统的实时监控系统功能,更好的使该自动生产系统融入到现代工业控制领域中。 关键词:PLC,电镀,组态王
Design of galvanization production line control system based on PLC ABSTRACT How did the article discuss has carried on the automated galvanization production line control using German Simens PLC S7-200, in this design, we produced the scene from the automatic control technology component in the domestic application prospect and the galvanization production line the environment to consider, take caused this production line truly to have the automatic production movement as the goal, will formulate has used in current and later all applies widespread also can adapt the many kinds of environment programmable controller to control the entire entire work flow the plan.Has analyzed the system software and hardware design part with emphasis, and gave the system hardware wiring diagram, PLC has controlled the I/O port distribution list as well as the overall program flow diagram and so on, has realized the galvanization production automation, enhanced the production efficiency, reduced the labor intensity.In order to adapt the modern tradition industry control system, we also used based on the configuration king software system had taken on the position machine, coordinate lower position machine PLC has completed this system real-time monitoring system function, better caused this automatic production system to integrate to the modern industry control domain in. KEY WORDS: PLC,Galvanization, Configuration King
习题解答(供参考) 习题二 2.2 系统的调速范围是1000~100min r ,要求静差率s=2%,那么系统允许的静差转速降是多少? 解:10000.02(100.98) 2.04(1) n n s n rpm D s ?= =??=- 系统允许的静态速降为2.04rpm 。 2.3 某一调速系统,在额定负载下,最高转速特性为0max 1500min n r =,最低转速特性为 0min 150min n r =,带额定负载时的速度降落15min N n r ?=,且在不同转速下额定速降 不变,试问系统能够达到的调速范围有多大?系统允许的静差率是多少? 解:1)调速范围 max min D n n =(均指额定负载情况下) max 0max 1500151485N n n n =-?=-= min 0min 15015135N n n n =-?=-= max min 148513511D n n === 2) 静差率 01515010%N s n n =?== 2.4 直流电动机为P N =74kW,UN=220V ,I N =378A ,n N =1430r/min ,Ra=0.023Ω。相控整流器内阻Rrec=0.022Ω。采用降压调速。当生产机械要求s=20%时,求系统的调速范围。如果s=30%时,则系统的调速范围又为多少?? 解:()(2203780.023)14300.1478N N a N Ce U I R n V rpm =-=-?= 378(0.0230.022)0.1478115N n I R Ce rpm ?==?+=
(1)]14300.2[115(10.2)] 3.1N D n S n s =?-=??-= [(1)]14300.3[115(10.3)] 5.33N D n S n s =?-=??-= 2.5 某龙门刨床工作台采用V-M 调速系统。已知直流电动机 60,220,305,1000min N N N N P kW U V I A n r ====,主电路总电阻R=0.18Ω,Ce=0.2V ?min/r,求: (1)当电流连续时,在额定负载下的转速降落N n ?为多少? (2)开环系统机械特性连续段在额定转速时的静差率N S 多少? (3)若要满足D=20,s ≤5%的要求,额定负载下的转速降落N n ?又为多少? 解:(1)3050.180.2274.5/min N N n I R r ?=?=?= (2) 0274.5274.5)21.5%N N S n n =?=+= (3) (1)]10000.05[200.95] 2.63/min N n n S D s r ?=-=??= 2.6 有一晶闸管稳压电源,其稳态结构图如图所示,已知给定电压* 8.8u U V =、比例调节器放大系数2P K =、晶闸管装置放大系数15S K =、反馈系数γ=0.7。求:(1)输出电压d U ;(2)若把反馈线断开,d U 为何值?开环时的输出电压是闭环是的多少倍?(3)若把反馈系数减至γ=0.35,当保持同样的输出电压时,给定电压* u U 应为多少? 解:(1)* (1)2158.8(12150.7)12d p s u p s U K K U K K V γ=+=??+??= (2) 8.8215264d U V =??=,开环输出电压是闭环的22倍 (3) * (1)12(12150.35)15) 4.6u d p s p s U U K K K K V γ=+=?+???= 2.7 某闭环调速系统的调速范围是1500r/min~150r/min ,要求系统的静差率5%s ≤,那么系统允许的静态速降是多少?如果开环系统的静态速降是100r/min ,则闭环系统的开环放大倍数应有多大? 解: 1)()s n s n D N N -?=1/ 1015002%/98%N n =???
第三章 专家控制系统 3.1 专家系统概述 1.专家及专家系统的定义 专家指的是那些对解决专门问题非常熟悉的人们,他们的这种专门技术通常源于丰富的经验以及他们处理问题的详细专业知识。 定义 3.1专家系统主要指的是一个智能计算机程序系统,其内部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的经验方法来处理该领域的高水平难题。也就是说,专家系统是一个具有大量的专门知识与经验的程序系统,它应用人工智能技术和计算机技术,根据某领域一个或多个专家提供的知识和经验,进行推理和判断,模拟人类专家的决策过程,以便解决那些需要人类专家才能处理好的复杂问题。简而言之,专家系统是一种模拟人类专家解决领域问题的计算机程序系统。 专家系统的基本功能取决于它所含有的知识,因此,有时也把专家系统称为基于知识的系统(knowledge-based system)。 3.1.1 专家系统的特点及优点 1.专家系统的特点 与常规的计算机程序系统比较,专家系统具有下列特点: (1)启发性 专家系统要解决的问题,其结构往往是不合理的,其问题求解(problem-solving)知识不仅包括理论知识和常识,而且包括专家本人的启发知识。 (2)透明性 专家系统能够解释本身的推理过程和回答用户提出的问题,以便让用户了解推理过程,增大对专家系统的信任感。 (3) 灵活性 专家系统的灵活性是指它的扩展和丰富知识库的能力,以及改善非编程状态下的系统性能,即自学习能力。 (4)符号操作。与常规程序进行数据处理和数字计算不同,专家系统强调符号处理和符号操作(运算),使用符号表示知识,用符号集合表示问题的概念。一个符号是一串程序设计,并可用于表示现实世界中的概念。 (5)不确定性推理。领域专家求解问题的方法大多数是经验性的;经验知识一般用于表示不精确性并存在一定概率的问题。此外,所提供的有关问题的信息往往是不确定的。专家系统能够综合应用模糊和不确定的信息与知识,进行推理。 2.专家系统的优点 (1) 专家系统能够高效率、准确、周到、迅速和不知疲倦地进行工作。 (2) 专家系统解决实际问题时不受周围环境的影响,也不可能遗漏和忘记。 (3) 可以使专家的专长不受时间和空间的限制,以便推广珍贵和稀缺的专家知识与经验。 (4) 专家系统能促进各领域的发展,它使各领域专家的专业知识和经验得到总结和精炼,能够广泛有力地传播专家的知识、经验和能力。 (5) 专家系统能汇集多领域专家的知识和经验以及他们协作解决重大问题的能力,它拥有更渊博的知识、更丰富的经验和更强的工作能力。 (6) 军事专家系统的水平是一个国家国防现代化的重要标志之一。 (7) 专家系统的研制和应用,具有巨大的经济效益和社会效益。 (8) 研究专家系统能够促进整个科学技术的发展。专家系统对人工智能各个领域的发展起了很大的促进作用,并将对科技、经济、国防、教育、社会和人民生活产生极其深远的影响。 3.1.2 专家系统的结构与类型 1. 专家系统的结构 专家系统的结构是指专家系统各组成部分的构造方法和组织形式。系统结构选择恰当与否,是与专家系统的适用性和有效性密切相关的,选择什么结构最为恰当,要根据系统的应用环境和所执行任务的特点确定。例如,MYCIN系统的任务是疾病诊断与解释,其问题的特点是
热工过程控制系统 第一章 过程控制系统概述 1.1过程控制定义及认识 1.2过程控制目的 *1.3过程控制系统的组成 1.4过程控制系统的特点 *1.5过程控制系统的分类 *1.6过程控制性能指标 1.7 过程控制仪表的发展 1.8 过程控制的地位 1.9 过程控制的任务 1.1过程控制定义及认识 过程控制定义 所谓过程控制(Process Control )是指根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程自动化。 1.3 过程控制系统组成 被控过程(Process ), 指运行中的多种多样的工艺生产设备; 过程检测控制仪表(Instrumentation ), 包括: 测量变送元件(Measurement ); 控制器(Controller ); 执行机构(Control Element ); 显示记录仪表 1.5 过程控制系统的分类 按系统的结构特点来分::反馈控制系统,前馈控制系统,复合控制系统(前馈-反馈控制系统) 按给定值信号的特点来分: 定值控制系统,随动控制系统,程序控制系统 性能指标: 对自动控制系统性能指标的要求主要是稳、快、准。 最大超调量σ%反映系统的相对稳定性,稳态误差ess 反映系统的准确性,调整时间ts 反映系统的快速性。 第三章 过程执行器 主要内容 执行器 电动执行器 气动执行器 调节阀及其流量特性 变频器原理及应用 本节内容在本课程中的地位 执行器用于控制流入 或流出被控过程的物 料或能量,从而实现 对过程参数的自动控 制。 3.1 调节阀(调节机构)结构 调节阀是一个局部阻力可以改变的节流元件。由于阀芯在阀体内移动,改变了阀芯与阀座之 间的流通面积,即改变了阀的阻力系数,被调介质的流量也就相应地改变,从而达到调节工艺参数的目的。 3.1 调节阀 功能:接受控制器输出的控制信号,转换成直线位移或角位移,来改变调节阀的流通截面积。 3.1.1 调节阀的组成 要求观察 思考调节变换 显示记录调节给定值执行机构检测 仪表记录仪显示器调节器控制器测量变送被控过程 执行器r(t)e(t)u(t)q(t)f(t)y(t)z(t)-控制器 测量变送 被控过程 执行器 r ( t ) e ( t ) u ( t ) q ( t ) f ( t ) y ( t ) z ( t ) -
1.1有传感器的开环控制系统:比如自动门控制系统、声控灯控制系统,红外线自动水龙头 “某某装置”检测到“某某”信号,该信号输入到“控制器”,“控制器”发出相应的指令,让“执行器”“运作”,使“控制对象”“怎么样”。 “某某装置”检测到信号,“控制器”接收到该信号后,便发出相应的指令,让“执行器”“运作”,使控制对象“怎么样”。 说明: “某某装置”:传感器,比如红外传感器,声音传感器,光传感器等等 “某某”信号:红外信号,声音信号,光线信号 “控制器”,“执行器”,“控制对象”等都是可以从控制系统的方框图里读出;“运作”,即“控制量”转化成动词;“怎么样”,即“被控量”转化成动词。 注意点: 在阐述工作过程时,要把控制系统所有状态的控制都写出来,可以按照以上的模式阐述,但是可以简洁一些。例如自动门的控制系统,要说明如何自动开启,也要说明如何自动关闭。 实际上,写控制系统的工作过程就是将方框图转化为文字表述,所以在写的时候一定要利用好方框图。同理,在写方框图的时候,也是从工作过程找到“控制器”、“执行器”等等。 举例:自动门控制系统 红外装置检测到人体的红外信号,该信号输入到控制电路,控制电路便发出相应的指令,让电机转动,从而使门开启。当门开启之后,如果没有人在门四周,控制电路作出判断,并发出指令,电机就反向转动,使门关闭。 1.2无传感器的开环控制系统:农业灌溉水泵抽水系统,电风扇风速控制系统 “一个输入量”,“控制器”接收到该信号后,便发出相应的指令,让“执行器”“运作”,使控制对象“怎么样”。 举例:农业灌溉水泵抽水系统 表述一:只要接通电源,电机接受到该信号后,带动水泵工作,水从水管里排出。只要关闭电源,电机停止工作,停止供水。 表述二:只要接通电源,电机就带动水泵工作,水从水管里排出。只要关闭电源,电机停止工作,停止供水。 水流量 输入量 到人热辐射 发出的信号) 门开或门关
过程控制系统Process Control System 天津大学电气与自动化工程学院 董峰
通过这章的学习,我们可 以得到以下收获: 通过这章的学习,我们可以得到以下收获:z 什么情况下采用串级增强控制系统性能?z 利用五个规则设计串级控制系统;z 串级控制系统的校正;z 系统设计和应用。
主要内容 主要内容 过程的挑战——改善性能1 串级控制的设计规则 2 串级控制的特点和应用原则3 几个过程控制的例子 4
4.1 引言 4.1.1 串级系统的概念 串级控制系统是在简单控制系统基础上发展起来的。当被控对象的滞后较大,干扰较剧烈、频繁,采用简单控制系统不能满足工艺要求时,可考虑采用串级控制系统。
1. 目的 (1)在对主要变量Y1作用前抑制扰动D2; 内环应有足够的能力消除这些扰动; (2)在内环中应能够补偿非线性(如:阀门的滞后)。 2. 分析 内环:外环: 2 2 ' 2 2 2 2 2 2 2 2 2 21 1 1 R L D R C P C P D C P Y+ = + + + = 1 1 2 1 1 2 1 1 2 1 1 ' 2 1 11 1 R C L P C L P C L P D D P Y + + + + =
3. 设计程序 (1)首先,按照内环传递函数L 2=1设计外环;例如:假设( 2)调整外环参数(滤波器时间常数)到是指达到稳定的合适的性能范围, 计算,此时调整内环的响应足够快;(3)设计内环以保证 √稳态性能的鲁棒性 √√内环的比例带合理, 且内环的开关控制无效。 如果以上步骤不能达到稳定,返回步骤(2),增加外环的滤波器时间常数。 ()()12L BW L BW >>()1L BW ()() 12105L BW L BW ×?>
控制系统的工作过程与方式 教材:(凤凰国标教材)普通高中课程标准实验教科书通用技术(必修2) 文档内容:控制系统的工作过程与方式 章节:第四单元控制与设计第二节控制系统的工作过程与方式 课时:第1课时 作者:叶朝晖(海南省海南中学) 一、教学目标 1. 知识与技能目标 (1)通过灯的开关、投影幕升降、婴儿尿湿报警器等控制系统案例分析,归纳控制系统的基本特征; (2)通过对音乐贺卡和自动门等典型案例的分析,熟悉简单的开环控制系统的基本组成和工作过程,了解开环控制的基本特征; 2. 过程与方法目标 (1)学会用方框图来归纳控制系统实例的基本特征,学会用方框图把复杂问题简单化; (2)借助老师搭建的支架,形成自己关于控制设计的创意,并学会用方框图表示自己的控制设计想法; (3)通过动手制作简单控制玩偶,亲自体验开环控制系统的组成和工作过程和原理。 3. 情感态度和价值观目标 (1) 通过魔术及控制系统的实物形成和保持学生了解控制系统、探究控制系统的兴趣与热情。 (2) 借助老师搭建的支架,形成自己关于控制设计的创意,从而体会创新的快乐,培养创新的精神。 二、教学重点 分析和理解开环控制系统的基本组成和工作过程分析,学会用方框图描述开环控制系统的工作过程,学会用方框图来表达设计想法 三、教学难点 理解开环控制系统的基本组成和工作过程,形成开环控制思想 四、教学方法 教授、任务驱动、小组合作。 五、设计思想 1. 教材分析 本节是“控制与设计”第二节“控制系统的工作过程与方式”第1课时的内容,其内容包括“控制系统”与“开环控制系统”,是学生在学习控制在生活和生产中的应用后,进一步深入学习与探讨有关控制系统的组成和工作过程,并为下一课时进一步学习“闭环控制系统的基本组成和工作过程”打下基础。为此,我对教学内容进行了如下的处理:首先理解什么是控制,再到归纳出控制系统的一般特征,接着分析开环控制的系统的基本组成和工作过程,最后对开环控制系统进行设计和制作,其内容是逐渐的深入和深化。其中画方框图作为一种分析问题的方法和手段贯穿这些内容中。对于画方框图,重点不在于教学生怎样画方框,而是要教学生怎样利用方框图来分析和理解控制系统,怎样利用方框图把复杂问题简单化,怎样用方框图来表达自己的设计想法。 2. 学情分析
第四章 题4-1:试绘制如下负反馈控制系统开环传递函数以K(g K )为参变量的闭环根 轨迹。 (1) K(0.5s 1) G(s)H(s)s(0.1s 1)(0.2s 1) +=++ (2) g 2 K (s 3)G(s)H(s)s(s 2s 2)+=++ (3) g 2K (s 2) G(s)H(s)(s 2s 2) +=++ (4) g K (s 4)G(s)H(s)s(s 1)(s 2)(s 3) +=+++ (5) g 2 K (s 2) G(s)H(s)(s 1)(s 4s 16) += -++ (1) 根轨迹方程: 21 (10)(5)g s s s s K +=- ++ K K g 25= a) 零点与极点:21-=z ,101-=p ,52-=p ,03=p b) 根轨迹趋向:2n m -≥,则极点-5,-10之间的根轨迹向右渐进. c) 渐近线:180(12)902 6.5k k n ?σ±+? = =±???-=-? d) 分离点与会合点:令 0g K s ?=? 即:010******* 3 =+++s s s 17.34s ?=-;2,3 1.5794 2.0776j s =-±(舍去) 根轨迹如下图: (2) 根轨迹方程: 31 (1)(1)g s s s j s j K +=-+++- a) 零点与极点:31-=z ,j p +-=11,j p --=12,03=p
b) 根轨迹趋向:2n m -≥,见图 c) 渐近线:180(12)902 0.5 k k n ?σ±+? = =±???-=? d) 与虚轴交点: 特征方程:322(2)30g g s s K s K ++++= 3210 122320.53g g g g s K s K s K s K +- 当4g K =时,01222=+s 2.45s j ?=± e) 出射角:180(12)sc n ββα=±+-+∑∑ 1809013526.618.43=±--+= 根轨迹如下图: (3) 根轨迹方程: 21 (1)(1)g s s j s j K +=- +++- a) 零点与极点:21-=z ,j p +-=11,j p --=12 b) 分离点与会合点: 在实轴上只有一个零点,在其右侧无根.则两个极点一个趋向负无穷, 一个趋向2-,令0g K s ?=? 即:0242=++s s 1 3.41s ?=-;20.5858s =-(舍去) c) 渐近线:180k ?=± d) 出射角:135sc β= 根轨迹如下图(以(-2,0)为圆心的圆弧):