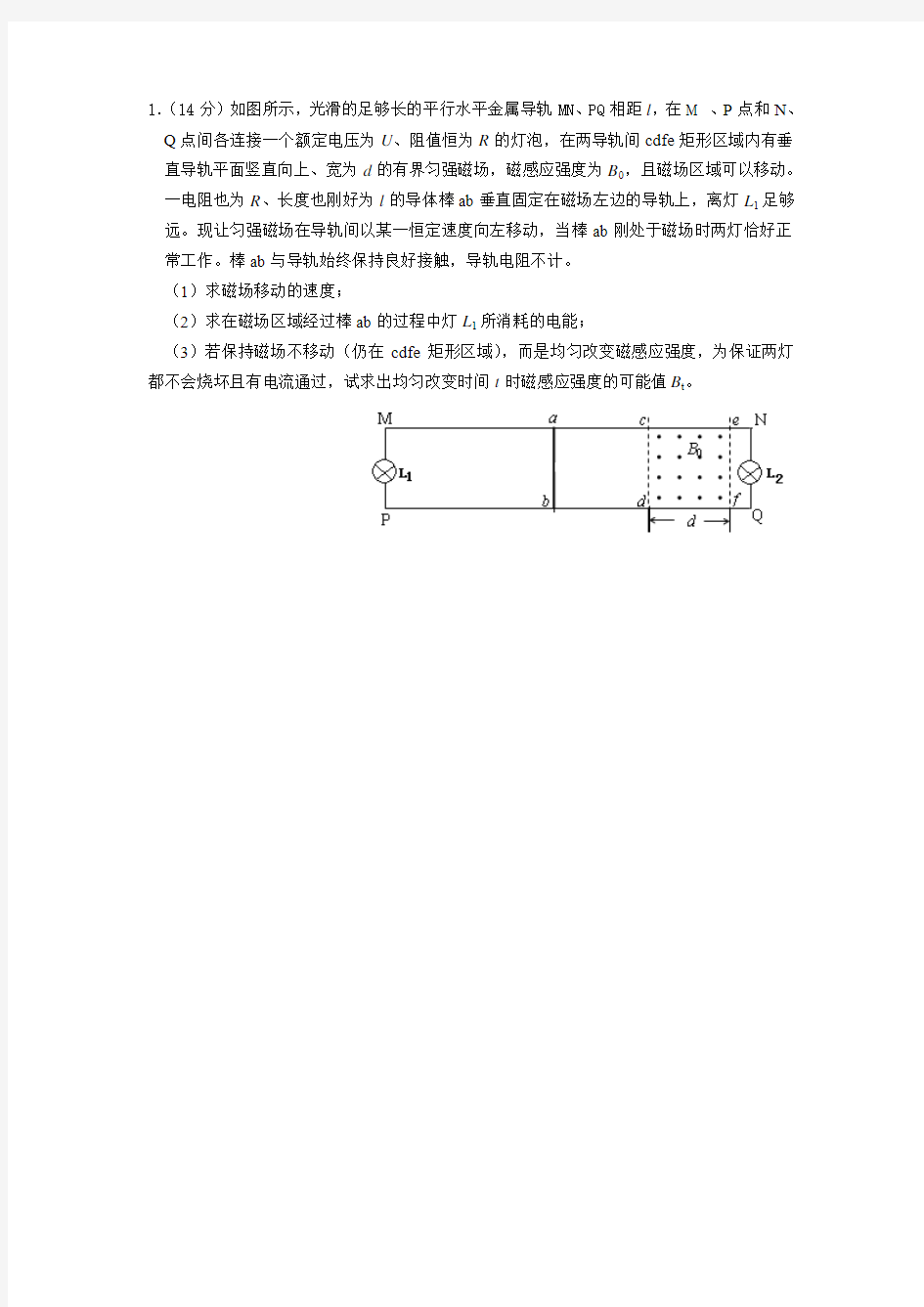

1.(14分)如图所示,光滑的足够长的平行水平金属导轨MN、PQ相距l,在M 、P点和N、Q点间各连接一个额定电压为U、阻值恒为R的灯泡,在两导轨间cdfe矩形区域内有垂直导轨平面竖直向上、宽为d的有界匀强磁场,磁感应强度为B0,且磁场区域可以移动。一电阻也为R、长度也刚好为l的导体棒ab垂直固定在磁场左边的导轨上,离灯L1足够远。现让匀强磁场在导轨间以某一恒定速度向左移动,当棒ab刚处于磁场时两灯恰好正常工作。棒ab与导轨始终保持良好接触,导轨电阻不计。
(1)求磁场移动的速度;
(2)求在磁场区域经过棒ab的过程中灯L1所消耗的电能;
(3)若保持磁场不移动(仍在cdfe矩形区域),而是均匀改变磁感应强度,为保证两灯都不会烧坏且有电流通过,试求出均匀改变时间t时磁感应强度的可能值B t。
2.(14分)随着越来越高的摩天大楼在各地的落成,至今普遍使用的钢索悬挂式电梯已经渐渐地不适用了。这是因为钢索的长度随着楼层的增高而相应增加,这些钢索会由于承受不了自身的重量,还没有挂电梯就会被扯断。为此,科学技术人员正在研究用磁动力来解决这个问题。如图所示就是一种磁动力电梯的模拟机,即在竖直平面上有两根很长的平行竖直轨道,轨道间有垂直轨道平面的匀强磁场B1和B2,且B1和B2的方向相反,大小相等,即B1= B2=1T,两磁场始终竖直向上作匀速运动。电梯桥厢固定在如图所示的一个用超导材料制成的金属框abcd内(电梯桥厢在图中未画出),并且与之绝缘.电梯载人时的总质量为5×103kg,所受阻力F f=500N,金属框垂直轨道的边长L cd=2m,两磁场的宽度均与金属框的边长L ac 相同,金属框整个回路的电阻R=9.5×10-4Ω,假如设计要求电梯以v1=10m/s的速度向上匀速运动,那么,
(1)磁场向上运动速度v0应该为多大?
(2)在电梯向上作匀速运动时,为维持它的运动,外界必须提供能量,那么这些能量是由谁提供的?此时系统的效率为多少?
a b
c d
N
3.(14分)边长为L=0.1m的正方形金属线框abcd,质量m=0.1㎏、总电阻R=0.02 ,从高为h=0.2m处自由下落(金属线框abcd始终在竖直平面上且ab水平)线框下有一水平的有界的匀强磁场,竖直宽度L=0.1m。磁感应强度B=1.0T,方向如图所示。试求:(1)线框穿过磁场过程中产生的热;
(2)全程通过a点截面的电量;
(3)在如图坐标中画出线框从开始下落到dc边穿出磁场的速度与时间的图像。
4.如图所示,水平面上有两根很长的平行导轨,导轨间有竖直方向等距离间隔的匀强磁场1B 和2B ,导轨上有金属框abdc ,框的宽度与磁场间隔相同,当匀强磁场21B B 和同时以恒定速度οv 沿直导轨运动时,金属框也会随之沿直导轨运动,这就是磁悬浮列车运动的原理。如果金属框下始终有这样运动的磁场,框就会一直运动下去。设两根直导轨间距L=0.2m ,T B B 121==,磁场运动的速度s m v 4=ο,金属框的电阻Ω=6.1R 。求:
(1)当匀强磁场21B B 和向左沿直导轨运动时,金属框运动的方向及在没有任何阻力时金
属框的最大速度。 (2)当金属框运动时始终受到f= 0.1N 的阻力时,金属框的最大速度。 (3)在(2)的情况下,当金属框达到最大 速度后,为了维持它的运动,磁场必须提供的功率。
B 2
2
1
B 1
1
5.(14分)两条彼此平行、间距为l=0.5m的光滑金属导轨水平固定放置,导轨左端接一电阻,其阻值R=2Ω,右端接阻值R L=4Ω的小灯泡,如下面左图所示。在导轨的MNQP 矩形区域内有竖直向上的匀强磁场,MP的长d=2m,MNQP区域内磁场的磁感应强度B 随时间t变化的关系如下面右图所示。垂直导轨跨接一金属杆,金属杆的电阻r=2Ω,两导轨电阻不计。在t=0时刻,用水平力F拉金属杆,使金属杆由静止开始从GH位置向右运动。在金属杆从GH位置运动到PQ位置的过程中,小灯泡的亮度一直没有变化。求:
(1)通过小灯泡的电流I L
(2)水平恒力的F的大小
(3)金属杆的质量m
l
d
6.(14分)如图所示,两根间距为L 的金属导轨MN 和PQ ,电阻不计,左端向上弯曲,其余水平,水平导轨左端有宽度为d 、方向竖直向上的匀强磁场I ,右端有另一磁场II ,其宽度也为d ,但方向竖直向下,磁场的磁感强度大小均为B 。有两根质量均为m 、电阻均为R 的金属棒a 和b 与导轨垂直放置,b 棒置于磁场II 中点C 、D 处,导轨除C 、D 两处(对应的距离极短)外其余均光滑,两处对棒可产生总的最大静摩擦力为棒重力的K 倍,a 棒从弯曲导轨某处由静止释放。当只有一根棒作切割磁感线运动时,它速度的减小量与它在磁场中通过的距离成正比,即v x ?∝?。
(1)若a 棒释放的高度大于h 0,则a 棒进入磁场I 时会使b 棒运动,判断b 棒的运动方向并求出h 0。
(2)若将a 棒从高度小于h 0的某处释放,使其以速度v 0进入磁场I ,结果a 棒以
02
v 的速
度从磁场I 中穿出,求在a 棒穿过磁场I 过程中通过b 棒的电量q 和两棒即将相碰时b 棒上的电功率P b 。
(3)若将a 棒从高度大于h 0的某处释放,使其以速度v 1进入磁场I ,经过时间t 1后a 棒
从磁场I 穿出时的速度大小为3
21v
,求此时b 棒的速度大小,在如图坐标中大致画出t 1时
间内两棒的速度大小随时间的变化图像,并求出此时b 棒的位置。
1
7、(14分)如图(a)所示,两根足够长、电阻不计的平行光滑金属导轨相距为L=1m,导轨平面与水平面成θ=30?角,上端连接R=1.5Ω的电阻;质量为m=0.2kg、阻值r=0.5Ω的金属棒ab放在两导轨上,距离导轨最上端为d=4m,棒与导轨垂直并保持良好接触。整个装置处于匀强磁场中,磁场方向与导轨平面垂直,磁感应强度大小随时间变化的情况如图(b)所示,前4s内为B=kt。前4s内,为保持ab棒静止,在棒上施加了一平行于导轨平面的外力F,已知当t=2s时,F恰好为零。求:
(1)k;
(2)t=3s时,电阻R的热功率P R;
(3)前4s内,外力F随时间t的变化规律;
(4)从第4s末开始,外力F拉着导体棒ab以速度v沿斜面向下作匀速直线运动,且F 的功率恒为P=6W,求v的大小。
8、(14分)如图所示,两根平行的光滑金属导轨与水平面成53°放置,导轨间接一阻值为3Ω的定值电阻R,导轨电阻忽略不计,在水平虚线L1、L2间有一与导轨所在平面垂直的匀强磁场B,磁场区域的宽度为d=1.0m。导体棒a的质量m a=0.2kg,
电阻R a=6Ω,导体棒b的质量m b=0.1kg,电阻R b=3Ω,它们分
别从图中M、N处同时由静止开始在导轨上无摩擦向下滑动,
当b刚穿出磁场时,a正好进入磁场,且都是匀速穿过磁场区域,
取重力加速度g=10 m/s2, sin53°=0.8,cos53°=0.6,
不计a、b之间电流的相互作用,求
(1)从导体棒a、b向下滑动起到a棒刚穿出磁场止,这个过程
中,a、b两棒克服安培力分别做多少功?
(2)在a棒穿越磁场的过程中,a、b两导体棒中的电流之比是
多大?
(3)M点和N点距L1的距离分别多大?
(4)在第(1)问的过程中,导体棒b上消耗的电能?
9.如下图所示,一个很长的竖直放置的圆柱形磁铁,产生一个中心辐射的磁场(磁场水平向外),其大小为r
k B =
(其中r 为辐射半径),设一个与磁铁同轴的圆形铝环,半径为R (大
于圆柱形磁铁的半径),而弯成铝环的铝丝其横截面积为S ,圆环通过磁场由静止开始下落,下落过程中圆环平面始终水平,已知铝丝电阻率为ρ,密度为ρ0.(已知导体的电阻
S
L R ρ
=,其中ρ为导体的电阻率,L 为导体的长度,S 为导体的横截面积.)试求:
(1)圆环下落的速度为v 时的电功率; (2)圆环下落的最终速度;
(3)当下落高度h 时,速度最大,从开始下落到此时圆环消耗的电能.
10.(14分)如图所示,两根相距为L 的金属轨道固定于水平面上,导轨电阻不计,一根质量为m 、长为L 、电阻为R 的金属棒两端放于导轨上,导轨与金属棒间的动摩擦因数为μ,棒与导轨的接触电阻不计。导轨左端连有阻值为2R 的电阻,在电阻两端接有电压传感器并与计算机相连。有n 段竖直向下的宽度为a 间距为b 的匀强磁场(a >b ),磁感强度为B 。金属棒初始位于OO ′处,与第一段磁场相距2a 。
(1)若金属棒有向右的初速为v 0,为使金属棒保持v 0一直向右穿过各磁场,需对金属棒施加一个水平向右的拉力,求金属棒进入磁场前拉力F 1的大小和进入磁场后拉力F 2的大小; (2)在(1)的情况下,求金属棒从OO ′开始运动到刚离开第n 段磁场过程中,拉力所做的功;
(3)若金属棒初速为零,现对棒施以水平向右的恒定拉力F ,使棒穿过各段磁场,发现计算机显示出的电压随时间以固定的周期做周期性变化,在给定的坐标中定性地画出计算机显示的图像(从金属棒进入第一段磁场开始计时)。
(4)在(3)的情况下,求整个过程导轨左端电阻上产生的热量,以及金属棒从第n 段磁场穿出时的速度。
11.(12分)辩析题水平面内固定一U 形光滑金属导轨,轨道宽1m ,导轨的左端接有R =0.4Ω的电阻,导轨上放一阻值为R 0=0.1Ω的导体棒ab ,其余电阻不计,导体棒ab 用水平线通过定滑轮吊着质量M =0.2 kg 的重物,空间有竖直向上的匀强磁场,如图所示.已知t =0时,B=1T ,
1m l =,此时物体在地面上且连线刚好被拉直,若磁场以t
B ??=0.1 T/s 增加,请问:经过一
段时间物体是否能被拉动?若不能,请说明理由;若能,请求出经过多长时间物体才被拉动.
以下为某同学的解答:
因为穿过回路的磁通量发生变化,产生感应电流,ab 受到向左的安培力作用.当安培力大于或等于被吊物体的重力时,重物才能被拉动.
回路产生的感应电动势为:t
B S t
E ???
=??Φ=
ab 受到向左的安培力为:R
R BLE BIL F +=
=0安,代入相关数据后,
发现安培力为恒力且F 安<Mg ,因此该同学得出的结论是:所以无论经过多长时间,物体都不能被拉动.
请问,该同学的结论是否正确?若正确,求出有关数据,若不正确,请指出错误所在并求出正确结果.
图10——15
12.(14分)如图(a )所示,光滑的平行长直金属导轨置于水平面内,间距为L 、导轨左端接有阻值为R 的电阻,质量为m 的导体棒垂直跨接在导轨上。导轨和导体棒的电阻均不计,且接触良好。在导轨平面上有一矩形区域内存在着竖直向下的匀强磁场,磁感应强度大小为
B 。开始时,导体棒静止于磁场区域的右端,当磁场以速度v 1匀速向右移动时,导体棒随之
开始运动,同时受到水平向左、大小为f 的恒定阻力,并很快达到恒定速度,此时导体棒仍处于磁场区域内。
⑴求导体棒所达到的恒定速度v 2;
⑵为使导体棒能随磁场运动,阻力最大不能超过多少?
⑶导棒以恒定速度运动时,单位时间内克服阻力所做的功和电路消耗的电功率各为多大? ⑷若t =0时磁场由静止开始水平向右做匀加
速直线运动,经过较短时间后,导体棒也做匀加速直线运动,其v -t 关系如图(b )所示,已知在时刻t 导体棒瞬时速度大小为v t ,求导体棒做匀加速直线运动时的加速度大小。
R (a )
v (b )
13.(12分)如图所示,MN、PQ是相互交叉成60°角的光滑金属导轨,O是它们的交点且接触良好。两导轨处在同一水平面内,并置于有理想边界的匀强磁场中(图中经过O点的虚线即为磁场的左边界)。导体棒ab与导轨始终保持良好接触,并在弹簧S的作用下沿导轨以速度v0向左匀速运动。已知在导体棒运动的过程中,弹簧始终处于弹性限度内。磁感应强度的大小为B,方向如图。当导体棒运动到O 点时,弹簧恰好处于原长,导轨和导体棒单位长度的电阻均为r,导体棒ab的质量
为m,已知弹簧的弹力与形变量成正比即F=kx,k为弹簧的劲度系数)求:
(1)导体棒ab第一次经过O点前,通过它的电流大小;
(2)弹簧的劲度系数k;
(3)从导体棒第一次经过O点开始直到它静止的过程中,导体棒ab中产生的热量。
14、(9分)如图所示,半径各为R1=0.5m和R2=1m的同心圆形导轨固定在同一水平面上。金属直杆ab(长度略长于0.5m)两端架在圆导轨上。这一装置放在磁感应强度B=1T 的匀强磁场内,磁场的方向垂直于圆轨道面铅直向下。在外加功率的作用之下,直杆ab以
ω=4rad/s的角速度绕过O点的铅直轴逆时针方向旋转。
(1)求ab中感应电动势的大小,并指出哪一端的电势较高。
(2)用r=1.5Ω的电阻器跨接于两导轨的两定点(如图中的c、d,电
阻器未绘)不计其他部分的电阻,求流过电阻器的电流大小。
(3)在(2)的情况下,设外加机械功率为2W,求杆ab克服摩擦力
做功的功率。
15.(14分)如图所示,足够长的光滑平行金属导轨MN 、PQ 竖直放置,一匀强磁场垂直穿过导轨平面,导轨的上端M 与P 间连接阻值为R =0.40Ω的电阻,质量为m =0.01kg 、电阻为r =0.30Ω的金属棒ab 紧贴在导轨上。现使金属棒ab 由静止开始下滑,其下滑距离
(1)当t =0.7s 时,重力对金属棒ab 做功的功率;
(2)金属棒ab 在开始运动的0.7s 内,电阻R 上产生的热量; (3)从开始运动到t =0.4s 的时间内,通过金属棒ab 的电量。
R
16.(14分)在质量为kg
m2.0
=,高
=的小车上, 竖直固定着一个质量为kg
M1
R、100
=
n匝矩形线圈,且小车与线圈的水平长度l相同。
=100
=、总电阻Ω
h05
.0
m
现线圈和小车一起在光滑的水平面上运动,速度为s
=,随后穿过与线圈平面垂直,
10
v/
m
1
磁感应强度T
=的水平有界匀强磁场,方向垂直纸面向里,如图(1)所示。已知小车B0.1
运动(包括线圈)的速度v随车的位移s变化的s
v-图象如图(2)所示。求:
(1)小车的水平长度l和磁场的宽度d Array(2)小车的位移cm
s10
=时线圈中的电流大小I以及此
时小车的加速度a
(3)在线圈进入磁场的过程中通过线圈某一截面的电量q
(4)线圈和小车通过磁场的过程中线圈电阻的发热量Q
0 10 20 30 40 50 s /cm
d
17.(14分)如图所示,空间存在着一个范围足够大的竖直向下的匀强磁场区域,磁场的磁感强度大小为B=0.6T.边长为L=0.5m的正方形金属框abcd(以下简称方框)被固定在光滑的绝缘水平面上,其外侧套着一个质量为m=0.4kg、与方框边长相同的U型金属框架MNPQ(以下简称U型框),U型框与方框之间接触良好且无摩擦.NP、bc、ad三边的电阻均为r=0.2Ω,其余部分电阻不计.U型框从图示位置开始以初速度v0=1.2m/s向右以a =-1.5m/s2作匀变速运动.问:
(1)开始时流过U型框的电流大小和方向如何?
(2)开始时方框上ad边的热功率多大?
(3)当U型框NP边与方框bc边间的距离为0.29m时作用在U型框上的外力大小和方向如何?
18.(14分)有一匀强磁场区域,区域的上下边界MM'、NN'与水平面平行,磁场的磁感应强度为B,方向如图所示,磁场上下边界的距离为H。一矩形线圈abcd位于竖直平面内,其质量为m,电阻为R,ab边长L1,bd边长L2,且L2<H。现令线框从离磁场区域上边界MM'的距离为h处自由下落,当cd边已进入磁场,ab边还未进入磁场的某一时刻,线框的速度已到达其完全进入磁场前的最大值,线框下落过程中cd边始终与磁场边界平行。试求:
(1)线框完全进入磁场前速度的最大值;
(2)从线框开始下落到cd边刚刚到达磁场区域下边界NN'的过程中,磁场作用于线框的安培力所做的功;
(3)线框cd边刚穿出磁场区域下边界NN'时线框的加速度。
N
/ /
19、(14分)如图(a)所示,两根足够长的水平平行金属导轨相距为L=0.5m,其右端通过导线连接阻值R=0.6Ω的电阻,导轨电阻不计,一根质量为m=0.2kg、阻值r=0.2Ω的金属棒ab放在两导轨上,棒与导轨垂直并保持良好接触,金属棒与导轨间的动摩擦因数 =0.5。整个装置处在竖直向下的匀强磁场中,取g=10m/s2。若所加磁场的磁感应强度大小恒为B,通过小电动机对金属棒施加水平向左的牵引力,使金属棒沿导轨向左做匀加速直线
运动,经过0.5s电动机的输出功
率达到P=10W,此后电动机功
率保持不变。金属棒运动的v~t
图像如图(b)所示,试求:
(1)磁感应强度B的大小;
(2)在0~0.5s时间内金属
棒的加速度a的大小;
(3)在0~0.5s时间内电动机牵引力F与时间t的关系;
(4)若在0~0.3s时间内电阻R产生的热量为0.15J,则在这段时间内电动机做的功。
20.(16分)如图所示,MN、PQ为间距L=0.5m足够长的平行导轨,NQ⊥MN。导轨平面与水平面间的夹角θ=37°,NQ间连接有一个R=5Ω的电阻。有一匀强磁场垂直于导轨平面,磁感强度为B0=1T。将一根质量为m=0.04kg的金属棒ab紧靠NQ放置在导轨上,且与导轨接触良好,导轨与金属棒的电阻均不计。现由静止释放金属棒,金属棒沿导轨向下运动过程中始终与NQ平行。已知金属棒与导轨间的动摩擦因数μ=0.5,当金属棒滑行至cd处时已经达到稳定速度,已知cd距离NQ为s米。试解答以下问题:(sin37°=0.6,cos37°=0.8)(1)请定性说明金属棒在达到稳定速度前的加速度和速度各如何变化?
(2)当金属棒滑行至cd处时回路中的电流多大?
(3)金属棒达到的稳定速度是多大?
刻起,让磁感强度逐渐减小,可使金属棒中不产生
感应电流,则磁感强度B应怎样随时间t变化(写
出B与t的关系式)?
第28卷第4期长春理工大学学报 Vo l 128No 142005年12月 J ou rnal of Changchun Un i versit y of Science and T echnology Dec .2005 收稿日期:2005-08-12 基金项目:振兴东北老工业基地项目(04-02GG156) 作者简介:张立颖,女(1976-),硕士研究生,主要从事光学仪器装调方面的研究。 平行度检测仪的设计方法 张立颖 刘德尚 王文革 (中国科学院长春光学精密机械与物理研究所,长春 130031) 摘 要:国内现有的平行度检测方法和检测设备都是用于检测可见光的平行度。对于激光和红外平行度的精密检测,还没有一个好的检测方法。本文介绍了一种既可以检测可见光又可以检测激光、红外平行度的检测仪,并且论述了设计原理、装调方法以及精度的验证,其检测精度可以达到?2d 。关键词:平行度;激光;红外 中图分类号:TH74512 文献标识码:A 文章编号:1672-9870(2005)04-0033-03 Design of t he L ight Parallelis m Detector Z HANG L i y ing LIU D es hang WANG W enge (Changchun Instit u te o f Op tics ,F i n eM echanics and Phy sics ,Chinese Acade my of Siences ,Changchun 130031)Abst ract :In our nation ,w e have l o ts o f m ethods and equ i p m ents to detect the parallelis m of v isible li g h.t But w e don t 'kno w how to detect the paralle lis m of laser and i n frared ,This paper descri b es briefly the desi g n idea,asse m b l y techn i q ue and ho w to test and verify its accuracy .A t las,t we get the conclu -si o n that the accuracy of the ne w detecto r is less than ?2d ,and the dectctor can be used i n v isi b l e ligh.t K ey w ords :Pa ra lle lis m;Laser ;Infrared 随着激光与红外技术的发展,红外跟踪器和激光测距机已被广泛应用在现代化的光电经纬仪上。 然而令人遗憾是,对于激光、红外系统的平行度的标校却一直没有一个令人满意的方法,无奈人们只能在几十公里外制造一个红外目标,并把这个目标假设为无穷远光源来标校激光、红外系统的平行度,这个方法测量误差大,实现也困难。本文设计的平行度检测仪(以下简称检测仪)从根本上解决了这个难题,它的结构简单、成本低,既可以在实验室使用,又可以直接安装在红外跟踪车上,在外场随时标校激光、红外的平行度,同时它又可兼做红外目标模拟器,因此具有良好的市场前景。 1 检测仪的结构及检测原理 111 检测仪的结构 用于检测激光、红外平行度的检测仪的组成包括,光学部分:(1)衰减片;(2)平面镜组;(3)分光镜;(4)平行光管;(5)红外光源;(6)特 制耙面。机械部分:(1)导轨;(2)可移动支架。用于可见光测量时,只需把红外光源更换为普通光源,将特制耙面更换为普通星点板即可。112 检测仪的检测原理11211 检测仪的光学系统 检测仪的光学系统如图1所示。检测仪由A 、B 两个光路组成。激光经过(光路A )衰减片衰减后,从平面镜2的周围入射到分光镜上,经过平行光管汇聚到特制耙面上,使耙面发热形成红外光源,发射出的光经过平行光管后变成平行光,经过分光镜把光分成两束,一束(光路A )原路返回,一束(光路B)进入红外接收系统。11212 检测仪的工作过程 ①红外光源发射出的光经过特制耙面(此时耙面可以视为一个星点)通过平行光管变成平行光,再经过分光镜进入光路B ,并呈像在红外成像器的光轴中心。 ②激光测距机发出的激光通过光路A 最终汇
导轨直线度误差检测方法介绍
一、直经度的定义 限制实际直线对理想直线变动量的一种形状公差。由形状(理想包容形状)、大小(公差值)、方向、位置四个要素组成。用于限制一个平面内的直线形状偏差,限制空间直线在某一方向上的形状偏差,限制空间直线在任一方向上的形状偏差。 几何误差是指零件加工后的实际形状、方向和相互位置与理想形状、方向和相互位置的差异。在形状上的差异称形状误差,在方向上的差异称方向误差,在相互位置上的差异称位置误差。直线度在几何公差中是最基础的部分,按检测关系分直线度属于被测要素中的单一要素——指对要素本身提出形状公差要求的被测要素。 二、导轨直线度误差检测方法 直线度误差的检测方法很多。工件较小时,常以刀口尺、检验平尺作为模拟理想直线,用光隙法或间隙法确定被测实际要素的直线度误差。当工件较大时,则常按国标规定的测量坐标值原则进行测量,取得必要的一组数据,经作图法或计算法得到直线度误差,还有种高效的测量方法就是直接利用太友科技的数据采集仪连接百分表来测量,无需人工读数、作图、分析,采集仪会自动读数数据并进行数据分析,一旦测量结果不合格还会自动产生报警功能。 测量直线度误差常用的仪器有:框式水平仪、合象水平仪、电感式水平仪、自准直仪以及数据采集分析仪等。这类仪器的特点是:测定微小角度的变化,换算为线值误差。本实验用合象水平仪和数据采集分析仪来进行直线度测量。 1、利用合象水平仪测量直线度法 1)合象水平仪的介绍 合象水平仪采用光学放大,并以对称棱镜使双象重合来提高读数精度,利用杠杆和微动螺杆传动机构来提高测量精度和增大测量范围。将合象水平仪置于被测工件表面上,当被测两点相对水平线不等高时,将引起两气泡象不重合,转动度盘,使两气泡重合,度盘转过格数代表被测两点相对水平线的高度差,见图2-3。
目录 一前言 (3) 二.尺寸标注和技术要求 (4) 三.检验导轨平行度夹具图解 (7) 四.工件的拆卸和测量 (8) 五、零件的安装 (12) 六. 被加工工件的设计 (13) 七 .设计小结 (16) 参考文献 (18)
一、前言 测绘是以计算机技术、光电技术、网络通讯技术、空间科学、信息科学为基础,以全球定位系统(GPS)、遥感(RS)、地理信息系统(GIS)为技术核心,将地面已有的特征点和界线通过测量手段获得反映地面现状的图形和位子信息,供工程建设的规划设计和行政管理之用。 于是,从6月3号到6月7号,我们进行了为期近一周的测量实习。这次实习的内容是对工程测量知识的实践化,实习的要求是让每个同学都对工程测量的实际操作能够达到基本掌握的程度。这次实习时间集中、内容广泛、程序系统,从工程测量实际出发,引导我们接触测绘这一专业,开启我们认知的大门,以求为以后的学习打下坚实的基础。
二、尺寸要求和技术要求 在装配图上尺寸标注与零件图不同。零件图要注出全部尺寸,而装配图上只需注出与机器或部件性能、装配、安装和运输有关的尺寸。同时各个工厂的习惯不同,装配图上尺寸标注的差别较大,下面是几类常用的尺寸。 1. 特性尺寸(规格尺寸)。它表示部件的性能或规格,在装配图中要直接注出。 2. 装配尺寸。在装配图上要直接注出各个零件之间的配合尺寸和主要的相互位置尺寸,作为设计零件和装配零件的依据。 3. 安装尺寸。是将部件安装到其他零、部件或基座上所必需的尺寸。 4.外形尺寸。表示部件的总长、总宽和总高 5. 轴向设计尺寸。在有些部门的装配图中,为了便于计算和检查,注出了轴上所有零件的长度尺寸,同时也保证了在拆画零件图时尺寸一致。如右图。 6. 零件的主要结构尺寸。在设计新产品的装配图上,常直接注出一些主要的结构尺寸,以限定零件的主要形状、大小和结构。这类尺寸标注很灵活,要看实际需要而定。 (1)夹具的总装图 1)夹具总装配图的绘制。夹具的总装配图应反映其工件的加工状态,并尽量按1:1的比例绘制草图。工件用假象的双点划线画出,并反映
用打表法测量阀体的平面度和平行度的方法 一 实验目的 本实验所用测量方法是工厂里常用的方法,有助于学生对平面度公差、面对面的平行度公差概念的理解,训练学生的动手能力(仅一台三坐标测量机,做不到人人动手操作),训练学生数据处理能力,以及对平面度评定方法的理解。 二 实验仪器 测量平台,作为测量的基准使用,精度要求高。磁力表架和表座、千分表、V 型块、被测零件阀体。 三 操作过程 1 将磁力表架和V 型块放置于测量平台上,将被测零件阀体放置于V 型块上。 2 将千分表安装在磁力表架上,调整磁力表架,使千分表的测头与阀体的被测平面垂直接触,且具有一定的接触力,并保证测量过程中千分表不超量程。 3 固定磁力表座,推动V 型块,并保证其与测量平台稳定接触,使千分表测头与 测量平台 阀体 表架 表座 千分表 V 型块
被测平面上3X3分布的点接触,记录9个数据,如下所示。 四数据处理 1 误差评定准则(见教材) 将测得数据处理成上述三个准则中的任意一种,各点数据中的最大值减去最小值即为平面度误差。而平行度误差评定较简单,在测得原始数据中,用最大值减去最小值即是。 2 平面度数据处理方法(见学习指导) 测得数据不会是三个准则中的任意一种,需要进行处理才行,处理方法按照如下例题所示。 例用打表法测量一块350mmx350mm的平板,各测点的读数值如下图所示。试用最小包容区域法求平面度误差值。 解:此题旨在训练培养大家进行数据处理,求解几何误差的能力。观察检测数据,最大值为20,最小值为-12 ,次小值为-10,决定采用三角形准则求解平面度误差。保留中间的最大值,求出3个相等的最小值,三个最小值位置选定-12、-10、+7,将3个数值相加除3等于-5,即3个数的平均值。利用矩阵变换方法,将3个最小值变为-5,即将第1列的数都加+7,而将第三列的数都加-7,将结果列表后,再将第一行都加-5,而第三行都加+5,再将结果列表,即得下图所示。 经过两次坐标变换后,故平面度误差值为() f=+--= 205μm25μm
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910293859.9 (22)申请日 2019.04.12 (71)申请人 华中科技大学 地址 430074 湖北省武汉市洪山区珞喻路 1037号 (72)发明人 张新宝 刘显喜 (74)专利代理机构 华中科技大学专利中心 42201 代理人 张彩锦 曹葆青 (51)Int.Cl. G01B 11/26(2006.01) (54)发明名称 一种导轨平行度测量装置及方法 (57)摘要 本发明属于导轨制造精度控制领域,并具体 公开了一种导轨平行度测量装置及方法,其在两 导轨副之间或导轨副一侧添加辅助测量点,通过 辅助测量点与导轨上设定测量点,使测量点满足 米字型布点条件,利用位姿测头分别测量导轨和 辅助测量点构成的各个测量点,测量米字型布点 的某测量截面上各个测量点时空间直线基准发 生器位置保持不变,测得同一设定直线上的测量 点的数据;然后对米字型布点的每个直线上所有 设定测量点数据进行归一化处理,统一到同一基 准平面后提取出导轨数据,进而进行数据评估可 得出被测导轨的平行度。本发明具有简单快速、 测量精度高、 低成本等优点。权利要求书2页 说明书10页 附图3页CN 110186397 A 2019.08.30 C N 110186397 A
权 利 要 求 书1/2页CN 110186397 A 1.一种导轨平行度测量装置,其特征在于,包括空间直线基准发生器(1)、位姿测头(2)和数据采集处理单元(10),其中: 所述空间直线基准发生器(1)用于发射直线基准光束(5),以作为整个测量过程中的空间直线基准; 所述位姿测头(2)包括机架(8)、安装在机架(8)上的底座(9)以及设于底座(9)底面的前支撑杆,该机架(8)内沿直线基准光束(5)入射方向的前后设有光敏面相互平行的前图像传感器(6)和后图像传感器(7),该机架(8)靠近后图像传感器(7)的一侧安装有倾角传感器(11),所述前图像传感器(6)和后图像传感器(7)用于采集测量点处直线基准光束截面的图像数据,并将采集的图像数据传输至数据采集处理单元(10)中,所述倾角传感器(11)用于测量位姿测头(2)的倾角;所述测量点包括待测导轨两导轨副上的基础测量点以及设于两导轨副之间或设于导轨副外侧的辅助测量点,且基础测量点与辅助测量点为米字型布点,若米字型布点不能覆盖整个导轨,则在两导轨副位于米字型之外的部分还布置有附加测量点; 所述数据采集处理单元(10)用于接收前图像传感器(6)和后图像传感器(7)采集的图像数据以及倾角传感器(11)测量的倾角,并基于图像数据与倾角进行数据处理以获得待测导轨的平行度。 2.如权利要求1所述的导轨平行度测量装置,其特征在于,所述前支撑杆位于底座(9)前端的中点处,该底座(9)的后端还设置有两根后支撑杆。 3.如权利要求1或2所述的导轨平行度测量装置,其特征在于,辅助测量点设于两导轨副之间时,其位于两导轨副的中间;辅助测量点设于导轨副外侧时,其与相邻导轨副间的距离等于两导轨副间的距离。 4.一种导轨平行度测量方法,其特征在于,采用如权利要求1-3任一项所述的装置进行测量,包括如下步骤: S1在被测导轨的两导轨副上设计基础测量点,并在两导轨副之间或导轨副的一侧添加辅助测量点,利用基础测量点和辅助测量点进行米字型布点,该米字型覆盖整个导轨或覆盖导轨的一部分,若所布米字型不能覆盖整个导轨,则在两导轨副位于米字型之外的部分布置附加测量点,使布点长度与导轨长度相当; S2利用位姿测头(2)分别测量米字型布点各直线上的基础测量点、米字型之外导轨副上的附加测量点以及辅助测量点的数据,测量同一直线时空间直线基准发生器(1)位置保持不变; S3利用数据采集处理单元(10)对数据进行归一化处理,以利用平面度的米字处理算法将导轨副上的基础测量点数据统一至同一基准平面上,并将两导轨副上的附加测量点数据也统一至同一基准平面上,提取出统一至同一基准平面上两导轨副的数据,基于两导轨副的数据进行平行度评估即可得出被测导轨的平行度。 5.如权利要求4所述的导轨平行度测量方法,其特征在于,步骤S2包括如下子步骤: S21空间直线基准发生器(1)置于米字型布点的直线延长线的一端,位姿测头(2)置于米字型布点直线上的对应测量点处,并使前支撑杆直接接触被测测量点; S22调整空间直线基准发生器(1)使空间直线基准发生器产生的直线基准光束近似平行导轨副的设定平面,其中设定平面指导轨副承载平面的理论平面; 2
任务四平行度误差、平面度误差的测量 【课题名称】 零件的平行度、平面度误差测量 【教学目标与要求】 知识目标 了解平面度误差、平行度误差的检测工具及测量方法。 能力目标 能够正确使用框式水平仪、自准直仪和百分表进行测量,并准确计算误差值。 素质目标 熟悉平面零件形位误差的检测原理、测量工具和使用方法,并能准确计算其误差。 教学要求 能够按照误差要求正确地选择检测工具,并能够掌握测量工具的使用方法,对工件进行准确的测量。 【教学重点】 框式水平仪、自准直仪和百分表的使用,各种形位误差的检测方法。 【难点分析】 平面度测量出9点误差值的调零方法及误差值计算。 【分析学生】 该内容的难度较大,特别是直线度误差值的计算和平面度零位调整比较难以理解,需要多做解释,学生才能够掌握。尤其是零位调整的方法更难懂,一定要把原理讲透。 【教学设计思路】 本次课内容较多,且内容难懂,建议分成4学时,以保证有更多的练习机会,由于实训条件有限,可以分组进行测量,然后按结果来讲述如何计算平行度和平面度的误差值。对于平面度的检测也应先讲测量原理和方法,再给学生实测,最后介绍如何调零位计算误差值,边讲边练再总结提高。本次课教学一定要做好预习工作。 【教学安排】 4学时 先讲后练,以练为主,加强巡视指导。 【教学过程】 一. 复习旧课 在形状和位置误差中,直线度误差在零件中出现比较多,大家是否还能记住这些形位公差的含义呢? 二、导入新课 需要应用什么测量工具来检测零件的直线度、平面度、平行度、呢?对于测量出来的数值又需要进行怎么样的处理才能得出正确的误差值呢?这是本次课程的主要内容。 三、讲授新课 1. 平行度误差的测量 平行度误差是工件的位置误差,一般是指工件两直线之间的平行度偏差值。它影响加工工件的精确度,因此控制平行度误差在允许的范围内就显得更为重要。 平行度误差分线与线和线与面之间的误差两种。 平行度误差的测量主要使用百分表。以一条线或面为基准,将百分表座放在基准上,沿基准来回移动,百分表针的最大值与最小值之差就是平行度误差值。
https://www.doczj.com/doc/033510804.html,/gckj/text/jiaoxuedagang.htm 形位误差的测量 直线度误差的测量 (一)实验目的 1.掌握用水平仪测量直线度误差的方法及数据处理。 2.加深对直线度误差含义的理解。 3.掌握直线度误差的评定方法。 (二)实验内容 用合象或框式水平仪按节距法测量导轨在给定平面内的直线度误差,并判断其合格性。(三)实验器具: 1.合象水平仪或框式水平仪 2.桥板 (四)测量原理及器具介绍 为了控制机床、仪器导轨及长轴的直线度误差,常在给定平面(垂直平面或水平平面)内进行检测,常用的测量器具有框式水平仪、合象水平仪、电子水平仪和自准直仪等测定微小角度变化的精密量仪。 由于被测表面存在直线度误差,测量器具置于不同的被测部位上时,其倾斜角将发生变化,若节距(相邻两点的距离)一经确定,这个微小倾角与被测两点的高度差就有明确的函数关系,通过逐个节距的测量,得出每一变化的倾斜度,经过作图或计算,即可求出被测表面的直线度误差值。合象水平仪因具有测量准确、效率高、价格便宜、携带方便等特点,在直线度误差的检测工作中得到广泛采用。 合象水平仪的结构,主要由微动螺杆、螺母、底盘水准仪、棱镜、放大镜、杠杆以及具有平面和V形工作面和底座等组成。 合象水平仪是利用棱镜将水准器中的气泡像复合放大,以提高读数时的对准精度,利用杠杆和微动螺杆传动机构来提高读的精度和灵敏度,其工作原理见本指导书第二篇。合象水平仪置于被测工件表面上,若被测两点相对自然水平线不等高时,将引起两端的气泡像不重合,转动度盘使气泡像重合,此时合象水平仪的读数值即为该两点相对自然水平面的高度差,刻度盘读数与桥板跨距L之间的关系为: h=i·L·a 框式水平仪是一种测量偏离水平面的微小角度变化量的常用量仪,它的主要工作部分是水准器。水准器是一个封闭的玻璃管,内表面的纵剖面具有一定的曲率半径,管内装乙醚或酒精,并留有一定长度的气泡。由于地心引力作用,玻璃管内的液面总是保持水平,即气泡总是在圆弧玻璃管的最上方。当水准器的下平面处于水平时,气泡处于玻璃管外壁刻度的正中间,若水准器倾斜一个角度α,则气泡就要偏离最高点,移动的格数与倾斜的角度α成正比。由此,可根据气泡偏离中间位置的大小来确定水准器下平面偏离水平的角度。 框式水平仪的分度值有0.1mm/m,0.05mm/m,0.02mm/m三种。如果水平仪分度值为
大跨度导轨副平行度测量新方法探讨 潘青友 光动(苏州)精密仪器有限公司 一、问题的提出 装备制造业在世界范围内的竞争使得机床的发展向高精度和大型化两个方向发展。作为对机床性能有着非常重要影响的导轨平行度指标一直以来备受机床生产厂家的关注,但长期以来却没有一个比较好的解决办,特别是当导轨副之间的跨度比较大(如6米)时,更是如此。目前处理这个问题的传统办法有两种: 1、机械办法(见图一),用机械的办法来测量导轨幅的平行度主要采用机械辅助装置和千分表等量表的方式来测量,效率低,测量的精度不高,而且还受测量人员的人为因素限制; 机械测量示意(图一) 2、用传统的激光干涉仪测量导轨副的平行度的方法(见图二)是分别测量两导轨副的直线度,最后根据两条拟合的直线来计算得到两导轨副的平行度。
传统激光干涉仪测量示意(图二) 该办法带来的问题:a,效率低下,每次测量都需要对准;b,提供的测量结果,无法为导轨装配调较提供准确和及时的指导;c,大跨度导轨副平行度测量非常困难;d,测量精度易受直角镜精度影响。 二、新的解决方案 利用美国光动公司创新双频激光干涉仪,对传统的测量方法加以改进,结合适当的工装夹具,得到两种新的测量大跨度导轨平行度的方法。 方法一,单光束法,如图三所表示。 滑块 使用光动公司LICS100型测量示意(图三) 该法巧妙地利用了光动公司最新推出的创新双频激光多普勒位移测量系统(LICS-100)结构简单(只有反射镜,带处理器的激光头和笔记本电脑三部分组成),轻巧(带处理器的激光头仅重2.3kg)、对准简单的优点并结合大跨度导轨副的导轨和滑块尺寸较大的特点,提出了激光多普勒创新双频单光束法。该方法的特点是使用简单,可以在测量的同时对导轨副平行度进行校正,测量导轨副的跨度可达15米,导轨长度不受限制(取决于线缆长度)。因此该方法除用于检测两导轨平行度外,还特别适合导轨安装现场的平行度的校正,具有很强的应用价值。 在使用时,测量人员既可以用两导轨间的理论距离为基准,也可以两导轨的某一实际间距为基准,本文以两导轨间测量的起始点为基准进行阐述。把带磁座的反射镜安装在一根导轨的一个滑块上,把带处理器的激光头安装在另一根导轨上对应的滑块上,笔记本电脑安放在推动两滑块运动的工装夹具上,连接激光头
平行度误差检测方法介绍
摘要:平行度是属于形位公差中的一种,平行度评价直线之间、平面之间或直线与平面之间的平行状态。下面我们将对平行度的误差检测方法进行讲解。 什么是平行度? 指两平面或者两直线平行的程度,指一平面(边)相对于另一平面(边)平行的误差最大允许值。 平行度公差 平行度公差是一种定向公差,是被测要素相对基准在方向上允许的变动全量。所以定向公差具有控制方向的功能,即控制被测要素对准基准要素的方向。 平行度公差的分类 1、面对面的平行度公差 该项平行度公差为:所指表面必需位于距离为0.05mm,且平行于基准平面的两平行平面之间。公差带是距离为公差值t且平行于基准平面的两平行平面之间的区域。 2、面对线的平行度公差 指平面必须位于距离为0.05mm,且平行于基准轴线的两平行平面之间。公差带是距离为公差值t且平行于基准轴线的两平行平面之间的区域。 3、线对线的平行度公差 ●给定方向线对线的平行度公差 平行度公差为孔D的实际轴线必须位于距离为公差值0.2mm,平行位于基准轴线A且垂直于给定方向的两平行平面之间。公差带是距离为公差值t且平行于基准轴线且垂直于给定方向的两平行平面之间的区域。 ●任意方向上线对线的平行度公差 平行度公差为孔D的实际轴线必须位于直径为公差值0.1mm,轴线平行于基准轴
线A的圆柱面所构成的公差带区域内。任意方向上线对线的平行度公差带是直径为公差值t,轴线平行于基准轴线的圆柱面内的区域。 平行度误差检测方法 传统测量方法 1、测量面对面平行度误差 公差要求是测量面相对于基准平面的平行度误差。基准平面用平板体现,如下图所示。测量时,双手推拉表架在平板上缓慢地作前后滑动,用百分表或千分表在被测平面内滑过,找到指示表读数的最大值和最小值。 被测平面对基准平面的平行度误差可按公式计算为: 2、测量线对面平行度误差 公差要求是测量孔的轴线相对于基准平面的平行度误差。需要用心轴模拟被测要素,将心轴装于孔内,形成稳定接触,基准平面用精密平板体现,如下图所示: 测量时,双手推拉表架在平板上缓慢地作前后滑动,当百分表或千分表从心轴上素线滑过,找到指示表指针转动的往复点(极限点)后,停止滑动,进行读数。 在被测心轴上确定两个测点a、b,设二测点距离为1 ,指示表在二测点的 2 读数分别
平行度误差测量方法
一、平行度误差 平行度公差是一种定向公差,是被测要素相对相对基准在方向上允许的变动全量。所以定向公差具有控制方向的功能,即控制被测要素对准基准要素的方向。 二、实验目的 熟悉用水平仪测量垂直平面内的直线度误差的方法,和用作图法求直线度误差的方法,还有用太友科技数据采集仪连接百分表测量平行度方法。 三、实验内容 1、测量面对面平行度误差; 2、测量线对面平行度误差; 3、测量线对线平行度误差。 四、传统测量方法 实验方法与步骤 1、测量面对面平行度误差 公差要求是测量面相对于基准平面的平行度误差。基准平面用平板体现,如图 4-1所示。测量时,双手推拉表架在平板上缓慢地作前后滑动,用百分表或千分表在被测平面内滑过,找到指示表读数的最大值和最小值。 图4-1 面对面平行度误差测量示意图 被测平面对基准平面的平行度误差可按公式计算为:
2、测量线对面平行度误差 公差要求是测量孔的轴线相对于基准平面的平行度误差。需要用心轴模拟被测要素,将心轴装于孔内,形成稳定接触,基准平面用精密平板体现,如图4-2所示。 测量时,双手推拉表架在平板上缓慢地作前后滑动,当百分表或千分表从心轴上素线滑过,找到指示表指针转动的往复点(极限点)后,停止滑动,进行读数。 在被测心轴上确定两个测点a、b,设二测点距离为1 2 ,指示表在二测点的读数分别 图4-2 线对面平行度误差测量示意图 为Ma、Mb,若被测要素长度为l 1 ,那么,被测孔对基准平面的平行度误差可按比例折算得到。计算公式为: f //=Mb Ma l 1 2 1 mm 3、测量线对线平行度误差 公差要求是测量孔的轴线相对于基准孔的轴线的平行度误差。需要用心轴模拟被测要素和基准要素,将两根心轴装于基准孔和被测孔内,形成稳定接触,如图4-3所示。 测量前,要先找正基准要素,找正基准心轴上素线与平板工作面平行。实验时用一对等高支承支承基准心轴,就认为找正好了。也可以用一个固定支承和一个可调支承支承基准心轴,双手推拉表架在平板上缓慢地作前后滑动,调整可调
---专业提供SPC数据分析软件等机械测量解决方案 平行度误差检测方法介绍 ---专业提供SPC数据分析软件等机械测量解决方案 摘要:平行度是属于形位公差中的一种,平行度评价直线之间、平面之间或直线与平面之间的平行状态。下面我们将对平行度的误差检测方法进行讲解。 什么是平行度? 指两平面或者两直线平行的程度,指一平面(边)相对于另一平面(边)平行的误差最大允许值。 平行度公差 平行度公差是一种定向公差,是被测要素相对基准在方向上允许的变动全量。所以定向公差具有控制方向的功能,即控制被测要素对准基准要素的方向。 平行度公差的分类 1、面对面的平行度公差 该项平行度公差为:所指表面必需位于距离为0.05mm,且平行于基准平面的两平行平面之间。公差带是距离为公差值t且平行于基准平面的两平行平面之间的区域。 2、面对线的平行度公差 指平面必须位于距离为0.05mm,且平行于基准轴线的两平行平面之间。公差带是距离为公差值t且平行于基准轴线的两平行平面之间的区域。 3、线对线的平行度公差 给定方向线对线的平行度公差 平行度公差为孔D的实际轴线必须位于距离为公差值0.2mm,平行位于基准轴线A且垂直于给定方向的两平行平面之间。公差带是距离为公差值t且平行于基准轴线且垂直于给定方向的两平行平面之间的区域。 任意方向上线对线的平行度公差 平行度公差为孔D的实际轴线必须位于直径为公差值0.1mm,轴线平行于基准轴---专业提供SPC数据分析软件等机械测量解决方案 线A的圆柱面所构成的公差带区域内。任意方向上线对线的平行度公差带是直径为公差值t,轴线平行于基准轴线的圆柱面内的区域。 平行度误差检测方法 传统测量方法 1、测量面对面平行度误差 公差要求是测量面相对于基准平面的平行度误差。基准平面用平板体现,如下图所示。测量时,双手推拉表架在平板上缓慢地作前后滑动,用百分表或千分表在被测平面内滑过,找到指示表读数的最大值和最小值。
测量平行度误差的各种方法讲解
一、平行度误差 被测实际要素相对于基准要素平行的理想要素的变动量。 特征:是理想要素的方向应与基准平行。 误差值:用与基准保持平行关系的定向最小区域的宽度来表示。 类型:根据面与线两类几何要素的相对关系,平行度误差有四种情况,即: 面对基准平面 线对基准平面 面对基准直线 线对基准直线 测量基准: 平面或线,常用模拟法体现。 面:平板/实际平面;线:心轴 测量方法: 依检测原则和基准体现方法不同,可组成多种测量方法。 有指示器法、水平基准法、自准直法、干涉法、量规法以及利用数据采集仪连接百分表法等。 二、测量方法介绍 1、传统人工读数方法 1)面与面之间的平行度误差 a.指示器测量法: 指示器在平板上移动时,其测头所形成的轨迹即平行于模拟基准的被测实际要素的理想平面。因此指示器示值的最大变动量即为平行度误差。
b.水平仪测量法: 分别在基准面和被测表面沿长度方向分段测量,将测得的值按直线度误差的方法求出基准面符合最小条件的理想直线,以该理想直线作为被测表面的评定基准,求得实际被测表面的直线度误差即为平行度误差。 水平仪法测量平行度 c.数据处理方法: 1)图解法 如图5-37所示。根据实际基准平面的误差曲线,按直线度误差最小区域判别法,求出理想基准直线L。接着在被测实际表面的误差曲线上,作出平行于理想基准直线L的定向最小包容区域。
2)计算法 计算法是以图解法为基础,它是首先根据理想基准直线L通过坐标的两点,用两点式求L直线方程,再根据L的斜率,求出被测表面曲线上通过距L最高与最低两点的点斜式直线方程L1 和L2 ,则L1 和L2在纵坐标轴上的截距差即为被测实际要素的平行度误差f。 根据图5-37可知理想基准直线L通过(2,15)和(8,30)两点,按两点式求得斜率K=5/2; 根据点斜式直线方程求平行于L的直线L1和L2,L1 和L2分别通过(5,25)和(7,10)两点; 令分别代入L1和L2方程中,可得L1在y轴上的截距y=12.5μm; L2 在轴上的截距y2 = -7.5 μm;于是可得平行度误差为:f=20 μm。 3)旋转法 旋转法较为简便易行,首先将基准实际要素的统一坐标值按直线度误差旋转法处理符合最小条件后,被测实际要素各点坐标值同步旋转,旋转后被测要素新的坐