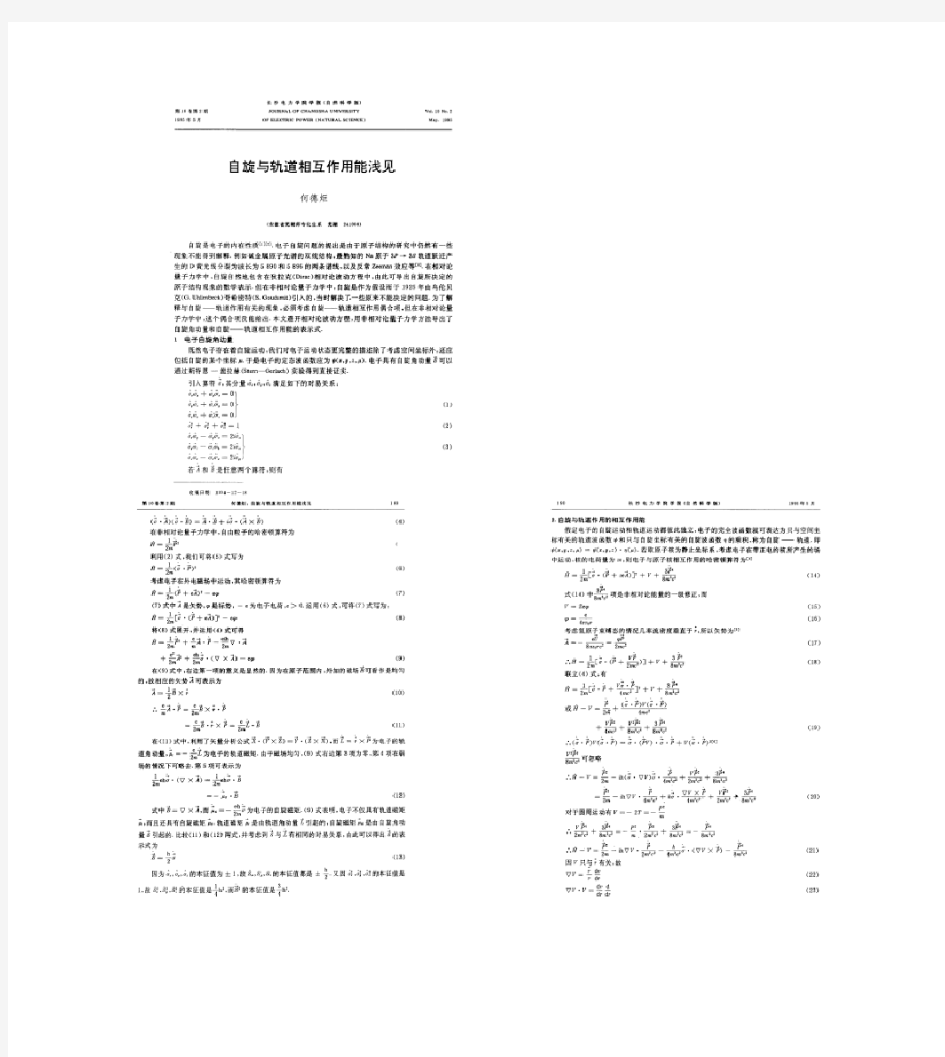

Bi 2Se 3自旋轨道耦合性质的计算 一、模型和基本参数: 图(a )黑色t 1、t 2、t 3基矢围成Bi 2Se 3菱形原胞,用于计算块体,红色方框包含一个五元层,是构成薄膜的一个QL 。 计算能带的布里渊区高对称点:Г(0 0 0)-Z(π π π)-F(π π 0)-Г(0 0 0)-L(π 0 0), 根据正空间和倒空间坐标的转换关系, 得到正空间中高对称点的坐标:Г(0 0 0)-Z(0.5 0.5 0.5)-F(0.5 0.5 0)-Г(0 0 0)-L(0 0 -0.5) 空间群: 166号~ R-3M (MS ) ) 3(5 3m R D d (文献) 结构分为:六角晶胞和菱形原胞(Rhombohedral )两种形式 六角晶胞(hexagon):含三个五元层,15个原子 菱形原胞(Rhombohedral ):含5个原子 晶格参数t=9.841, α=24.275 原子坐标: 弛豫值 实验值 Bi(2c) (0.400,0.400,0.400) Bi(2c) (0.398, 0.398, 0.398) Se(1a) (0,0,0) Se(1a) (0,0,0) Se(2c) (0.210, 0.210, 0.210) Se(2c) (0.216, 0.216, 0.216) 赝势:PAW_GGA_PBE E cut =340 eV 块体:Kpoints=11×11×11 薄膜:Kpoints=11×11×1 块体结构优化时,发现Ecut=580,KPOINTS=151515,得到的结构比较合理 计算薄膜真空层统一: 15 ?
ISMER取-5(或取0,对应SIGMA=0.05) 二、计算过程描述: 1)范德瓦尔斯作用力的影响。 手册中一共有5种方法: Correlation functionals:LUSE VDW = .TRUE. the PBE correlation correction AGGAC = 0.0000 Exchange交换functionals vdW-DF vdW-DF2 方法一方法二方法三方法四方法五revPBE optPBE optB88 optB86b rPW86 GGA = RE LUSE_VDW = .TRUE. AGGAC = 0.0000 GGA = OR LUSE_VDW = .TRUE. AGGAC = 0.0000 GGA = BO PARAM1 = 0.1833333333 PARAM2 = 0.2200000000 LUSE_VDW = .TRUE. AGGAC = 0.0000 GGA = MK PARAM1 = 0.1234 PARAM2 = 1.0000 LUSE_VDW = .TRUE. AGGAC = 0.0000 GGA = ML Zab_vdW = -1.8867 LUSE_VDW = .TRUE. AGGAC = 0.0000 经测试,发现方法二optimized Perdew-Burke-Ernzerhof-vdW (optPBE-vdW)是最合适的。并通过比较发现,范德瓦尔斯作用力对块体和单个QL厚度的薄膜的影响很小,对多个QL 厚度的薄膜结构影响比较大,所以优化时需要考虑QL之间的vdW相互作用,而范德瓦尔斯作用力对电子态的影响也比较小,所以,计算静态和能带的时候,可以不考虑。 此外,以往文献中的计算,有的直接采用实验给出的结构参数建模,不再弛豫,计算静态和能带,得到的结果也比较合理。 所以,我们对薄膜采用不优化结构和用optPBE方法优化结构,两种方式。 2)算SOC。 计算材料的自旋轨道耦合性质,一般在优化好的结构基础上,在静态和能带计算是加入特定参数来实现。一般,分两种方式: 第一种是从静态开始,就进行非线性的计算,能带也进行非线性自旋轨道耦合计算。 第二种,则是,在静态时进行非线性计算(按照一般的静态计算进行),产生CHGCAR、WA VECAR,进行能带非线性自旋轨道计算时,读入这两个参数。 V ASP手册推荐使用第二种。 我们通过多次比较发现,使用第一种方法,可以得到更为合理的结果。 3)关于d电子的考虑。 我们分别考虑了Bi原子的两种电子组态: 第一种,含有15个价电子,包含d电子,电子组态5d106s26p3; 第二种,含有5个价电子,不含d电子,电子组态是6s26p3。 通过比较计算结果,发现并没有明显的区别,所有我们选用第二种。
无砟轨道精调技术 【摘要】通过沪宁城际铁路客运专线CRTS Ⅰ型板式无砟轨道及京沪高速铁路CRTS Ⅱ型板式无砟轨道静、动态两个阶段的轨道精调技术实践,结合高速动车组轨栓结果分析,对无砟轨道状态调整技术进行了系统的研究,总结了精调施工方法,提出静态适算控制标准,给出动态阶段的分析方法、调整原则和目标管理值。【关键字】无砟轨道轨道精调 一、轨道精调简介 待铺轨单位对长钢轨铺设放散、锁定结束后,即展开轨道精调作业。前后分为静态调整和动态调整两个阶段。静态调整达到静态验收标准后,开始联调联试。开始联调联试后,精调工作进入轨道动态调整阶段,该阶段主要通过16 0km/h 轨检车和350km/h动车组对轨道状态进行检测和评估。 静态调整阶段:是根据轨道小车依据CPIII控制点进行静态测量轨道几何状态,通过软件分析后进行线形不断完善的调整过程。包括对轨道线形(轨向和高低)进行优化调整,合理控制轨距变化率和水平变化率,使轨道静态精度达到规X 要求。 动态调整阶段:主要通过对动态轨检车的数据进行分析结果,分点利用静态调整的方式对轨道进行调整。动态检测结果评估分四级,一级点只需养护,二级点需重点调整,三级点限速行车,四级点停止行车。 通过两个阶段的调整,最终使得无砟轨道轨道状态满足动车组高速运行的舒
适性和安全性要求。 二、轨道扣件系统 CRTS II型板式无砟轨道采用WJ-8C型扣件系统。 扣件组成:轨道板采用WJ-8C型扣件,WJ-8C型扣件(以下简称扣件)由螺旋道钉、平垫圈、弹条、绝缘块、轨距挡板、轨下垫板、铁垫板、铁垫板下弹性垫板和预埋套管组成。 三、调轨仪器和机具安排 每个小组配置的主要测量仪器、施工机具
第二章高速铁路有砟、无砟轨道结构及精调 第一节概述 无砟轨道是以混凝土或沥青混合料等取代散粒道碴道床而组成的轨道结构形式。由于无碴轨道具有轨道平顺性高、刚度均匀性好、轨道几何形位能持久保持、维修工作量显著减少等特点,在各国铁路得到了迅速发展。特别是高速铁路,一些国家已把无碴轨道作为轨道的主要结构形式进行全面推广,并取得了显著的经济效益和社会效益。以下是无砟轨道的主要优势和缺点。 一、无砟轨道的优势主要有: 1、轨道结构稳定、质量均衡、变形量小,利于高速行车; 2、变形积累慢,养护维修工作量小; 3、使用寿命长—设计使用寿命60年; 二、无砟轨道的缺点主要有: 1、轨道造价高:有砟180万/km,双块式350万,1型板式450万,2型 板式500万。 2、对基础要求高因而显著提高修建成本:有砟轨道可允许15cm工后沉 降,无砟轨道允许3cm,由此引起的以桥代路及路基加固投资巨大。 3、振动噪声大:减振降噪型无砟轨道目前尚不成功,减振无砟轨道选型 存在较大困难。 4、一旦损坏整治困难:尤其是连续式无砟轨道。 第二节无砟轨道结构 一、国外铁路无碴轨道结构型式 国外铁路无碴轨道的发展,数量上经历了由少到多、技术上经历了由浅到深、品种上经历了由单一到多样、铺设范围上经历了由桥梁、隧道到路基、道岔的过程。无碴轨道已成为高速铁路的发展趋势。 1.日本 日本是发展无碴轨道最早的国家之一。早在20世纪60年代中期,日本就开始了无碴轨道的研究与试验并逐步推广应用,无碴轨道比例愈来愈大,成为高速铁路轨道结构的主要形式。据统计,日本高速铁路无碴轨道比例,在20世纪70年代达到60%以上,而90年代则达到80%以上。
VASP 自旋轨道耦合计算 已有4532 次阅读2011-9-13 20:37|个人分类:VASP|系统分类:科研笔记 将VASP 的makefile 文件中的 CPP 选项中的 -DNGXhalf, -DNGZhalf, -DwNGXhalf, -DwNGZhalf 这4个选项去掉重新编译VASP才能计算自旋轨道耦合效应。 以下是从VASP在线说明书整理出来的非线性磁矩和自旋轨道耦合的计算说明。 非线性磁矩计算: 1)计算非磁性基态产生WAVECAR和CHGCAR文件。 2)然后INCAR中加上 ISPIN=2 ICHARG=1 或 11 !读取WAVECAR和CHGCAR文件 LNONCOLLINEAR=.TRUE. MAGMOM= 注意:①对于非线性磁矩计算,要在x, y 和 z方向分别加上磁矩,如 MAGMOM = 1 0 0 0 1 0 !表示第一个原子在x方向,第二个原子的y方向有磁矩 ②在任何时候,指定MAGMOM值的前提是ICHARG=2(没有WAVECAR和CHGCAR文件)或者ICHARG=1 或11(有WAVECAR和CHGCAR文件),但是前一步的计算是非磁性的(ISPIN=1)。 磁各向异性能(自旋轨道耦合)计算:
注意: LSORBIT=.TRUE. 会自动打开LNONCOLLINEAR= .TRUE.选项,且自旋轨道计算只适用于PAW赝势,不适于超软赝势。 自旋轨道耦合效应就意味着能量对磁矩的方向存在依赖,即存在磁各向异性能(MAE),所以要定义初始磁矩的方向。如下: LSORBIT = .TRUE. SAXIS = s_x s_y s_z (quantisation axis for spin) 默认值: SAXIS=(0+,0,1),即x方向有正的无限小的磁矩,Z方向有磁矩。 要使初始的磁矩方向平行于选定方向,有以下两种方法: MAGMOM = x y z ! local magnetic moment in x,y,z SAXIS = 0 0 1 ! quantisation axis parallel to z or MAGMOM = 0 0 total_magnetic_moment ! local magnetic moment parallel to SAXIS (注意每个原子分别指定) SAXIS = x y z !quantisation axis parallel to vector (x,y,z),如 0 0 1 两种方法原则上应该是等价的,但是实际上第二种方法更精确。第二种方法允许读取已存在的WAVECAR(来自线性或者非磁性计算)文件,并且继续另一个自旋方向的计算(改变SAXIS 值而MAGMOM保持不变)。当读取一个非线性磁矩计算的WAVECAR时,自旋方向会指定平行于SAXIS。 计算磁各向异性的推荐步骤是: 1)首先计算线性磁矩以产生WAVECAR 和CHGCAR文件(注意加入LMAXMIX)。 2)然后INCAR中加入: LSORBIT = .TRUE. ICHARG = 11 ! non selfconsistent run, read CHGCAR
京沪高铁CRTSI型轨道板精调 一. 引言 随着国内高速铁路的飞速发展,对板式轨道的精调测量系统的需求将与日俱增,无论是何种形式,何种规格的板式无砟轨道,只有具体的测量标架形状,性能的差异,而轨道板的精密测量,调整定位原理却基本相同。下面就针对我项目部所参加的CRT S型板精调系统做介绍与总结。 CRT0板型又称“博格板”,轨道板精调测量系统是针对高速铁路的CRT S 型板式无砟轨道施工时辅设轨道板而专门研制的精调测量定位系统。利用本系统可精确测量出待调轨道板与设计位置间的横向和高差偏差,并将调整量发送至与调整工位对应的显示器上,指导工人将轨道板调整至设计位置处。 京沪高速铁路主要采用CRTSI型板式无砟轨道,设计最高运行时速380km, 初期运营时速300km0为达到这一要求要求调整到位以后的轨道板实际空间位置的高程和横向偏差须在土 0.3mm范围内。要实现轨道板如此精确的定位,传统的测量设备,测量方法和手段无法满足要求,需要借助轨道板精调系统0 轨道板精调施工质量是整个无砟轨道系统的关键点0 在京沪高速铁路施工前 期和施工过程中,进行了多次模拟实验,对布板数据计算,设标网的建立,精调技术,人员操作培训,仪器设备选择等方面做了大量的工作0 二.精调系统简介 轨道板精调测量系统简称SPPS是针对高速铁路的CRTSII型板式无砟轨道施工时安装轨道板而专门研制的精确测量定位系统0 一般由测量机器人、测量标架,强制对中三角架、控制计算中心、无线信息显示器等共同组成,其中测量机器人由全自动全站仪与数传电台组成0其主要工作原理为:通过后方交会获得全站仪坐标和定向;根据单元轨道板精调软件测量2个T形标架上或螺孔器适配器上的4个棱镜的空间三维坐标,计算单元轨道板的空间实际位置以及单元轨道板的横向和高程的调整量,指导现场进行轨道测量调整作业0 测量仪器架设在GRP已知点上,经过精密定向后再利用测量仪器对滑架上的精密棱镜进行测量,得出测量值,测量值与理论的设计值进行对比得到调整差值,并将这些差值通过蓝牙,无线网卡发送到 3 个滑架的显示器上,以便调整人员进行调整,直至达到误差范围之内0 三.轨道板粗铺
自旋轨道耦合计算过程探索 1.经验总结 1)对于Bi2Se3家族材料,QL内是强的共价结合作用,QL之间是范德瓦尔斯作用力。所以,在优化结构的时候,需要考虑范德瓦尔斯相互作用。 一般,对于一种没有算过的新材料,可以尝试以上五种方法,哪一种最合理就用哪个。 Bi2Se3家族材料,经测试最合适的是optPBE-vdW方法。 3)测试发现,对于1QL和块体,范德瓦尔斯作用的影响不是很影响;对于多个QL厚度的薄膜,QL之间范德瓦尔斯作用的影响比较明显。 5)算soc加入LSORBIT=.TRUE.和LORBMOM=.TRUE., 比LSORBIT=.TRUE.和GGA_COMPAT = .FALSE.得到的结果更合理。 6)薄膜优化的时候,可以用ISIF=2。 7)计算静态的时候输出CHARG,能带的时候ISTART可以等于0,ICHARG等于11。 7)薄膜的结构需要中心对称,切得时候需要注意。 8)计算vdW,需要vasp5.2.12以上的版本,并且将vdw_kernel.bindat文件放到计算的文件夹中。9)vdW相互作用对结构的影响比较大,对后面的静态计算和能带计算电子态的影响比较小。10)取合适的K点,可以得到较为合理的结构,对后面电子态的计算影响也不是很大。 2. 结构优化 赝势:PAW_GGA_PBE E cut=340 eV Kpoints=10×10×10 ISMER取-5,计算能带时,取0,对应SIGMA=0.05 在MS中可以在build-Symmetry -中把Bi2Se3 rhombohedral representation(菱形表示)和hexagonal representation(六角表示)相互转换
附件7 无砟轨道精调作业指导书 一、基本要求 1.CPⅢ网重新复测,经评估合格方可应用于精调。 2.各位零配件安装到位,无缺少。 3.无碴轨道经过冲洗,无杂物,无灰尘。 4.无缝线路应力放散完毕且焊联、锁定。 二、准备工作 1.各种规格材料基本到位。 2.绝对测量、相对测量小车经检验、调试合格。 3.各类机具齐备(轨距调整器、内燃扳手、无碴液压起道机、轨道仪、照明工具、数显道尺、塞尺、弦线、扭力测试仪、撬棍、改道小撬棍等)。 三、精调步骤 1.总体流程。
2.精确测量。 为监测线路设备的变化,指导线路设备养护,需对轨道实测中线、高程进行绝对精度测量。主要采用安博格小车与线路CPIII控制网实现对轨道精测。 ⑴测量的前期准备工作 ①输入并核对设计数据(平曲线、竖曲线、超高、控制点,如存在断链,需分别输入,上、下行线也要分别输入)。 ②设置项目属性,如平面位置和高程测量基准等。
③定期对全站仪及小车进行保养、检定。 ⑵测量的现场工作 ①检查钢轨表面状态,检查扣件弹条与轨距挡板密贴。确保零配件无缺少,扣件扭矩达标。 ②正倒镜检查全站仪水平角和竖角偏差,如果超过3秒,在气象条件较好的情况下进行组合校准及水平轴倾斜误差(α)校准;检查全站仪ATR 照准是否准确,有无ATR的偏差也应小于3秒。 ③使用至少8个CPIII控制点自由设站,如果现场条件不满足,至少应有6个CPIII控制点,其中前后至少各使用一个60米以上的控制点。根据天气条件确定最大目标距离。状况好时控制在60m以内,不好时将距离缩短。 ④设站的同时组装轨检小车,将双轮部分靠近低轨。 ⑤在稳固的轨道上校准超高传感器,一般每天开始测量前校准一次,如气温变化迅速,可再次校准;校准后可在同一点进行正反两次测量,测量值之和应在0.3mm以内。 ⑥将全站仪对准轨检小车棱镜,检查通信,关闭全站仪强力搜索,并锁定棱镜。 ⑦放样60米以上的一个控制点对设站进行检核。 ⑧进入施工模式,看偏差数据是否稳定,如不稳定(变化范围超过 0.7mm),将小车向前推,找到数据相对稳定的距离,根据此距离再次重
无碴轨道精调技术方案 1、编制依据 1《无碴轨道铁路工程工程测量技术》。 2《高速铁路工程测量规范》。 3《高速铁路工程测量规范条文说明》。 4 业主下达的相关文件。 2、编制范围 新建兰渝铁路1标段DK84+950—DK100+707段范围黑山隧道无碴轨道施工。 3、无砟道床施工前具备的条件 ⑴CRTS-I型双块式无砟轨道道床施工应在隧道施工结束后,并对隧道沉降变形等进行系统的观测和分析,满足《客运专线无砟轨道铺设条件评估技术指南》要求并经业主指定的有资质的单位评估合格并出具评估报告后,开始安排施工作业。 ⑵无砟轨道控制网(CPⅢ网)的测设工作已完成,测量精度满足《高速铁路工程测量规范》的要求,并已报设计单位评估合格。 4、测量网控制 无砟轨道测量基础网采用CPⅢ控制网技术,测量精度严格按《高速铁路工程测量规范》执行。在道床施工准备期间,必须查验与铺设段轨道工程有关的线下工程施工质量检验报告、沉降变形观测资料及评估报告,接收线下工程单位的线路测量资料及控制基桩,对线路范围内CPⅡ网进行加密、复测后,在施工工点范围内建立独立、完整、
精确的基标控制网。CPⅢ控制基标每50-80m设一对。成对布设在线路两侧的两个基标点里程差不超过1m。一次布设的CPⅢ施工基标精密控制网最短长度不得少于2km。 5、测量放线 步骤1:通过不少于4对CPⅢ控制点按设计道床板位置在每一个纵断面上放出道床板边线控制点(直线段10m一个断面,曲线段5m 一个断面),采用钢钉精确定位做好标记,红油漆标识,用墨线弹出道床板边线。 步骤2:通过不少于4对CPⅢ控制点按设计道床板轨面标高在两侧护墙上放出道床板轨面绝对标高点(直线段10m一个断面,曲线段5m一个断面),采用黑色记号笔在两侧护墙上做好标记,红油漆标识,用墨线弹出道床板轨面绝对高程线。 ▲人员:测量员3人,普工2人。 ▲机具、材料:测量仪器1套(放线定位);墨斗(弹线);钢卷尺;红油漆。 6、轨排粗调 粗调顺序。对某两个特定轨排架而言,粗调顺序为:1→4→5→8→2→3→6→7→1→2→3→4→5→6→7→8。(见图1) 图1 轨排粗调顺序 步骤1:中线调整。配备全站仪和测量手簿,采用自由设站法定
CRTSII型板式无砟轨道精调施工工法 京沪项目翟春辉 一.前言: CRTSⅡ型板式无砟轨道技术是我国引进德国博格板式无砟轨道系统技术后,经过消化、吸收、再创新,形成中国特色的板式无砟轨道技术。 轨道板精调是将预制好的CRTSII型轨道板,通过测量安放在指定承轨槽上精调标架棱镜的三维坐标,计算出轨道板实测坐标与设计计算坐标之间的偏差值,调整安装在轨道板下的精调千斤顶,使轨道板位置达到设计要求的过程。 二.工法特点. II型轨道板精调系统要求高标准、高精度、高质量、工序控制严格。精度高体现在位置、几何尺寸、时间、温度等方面,譬如:现浇梁的顶面平整度控制4m/8mm;底座板高程精度±5mm,轨道板粗定位≤10mm,轨道板精确定位控制在≤0.2mm;CA 砂浆从搅拌成品到提升上桥,最终到灌注入板缝控制在30 分钟内;底座混凝土基本浇筑段必须在一天内完成等。因此,板式无砟轨道精调是II型板施工控制中的重要环节。 三.CRTSⅡ型板精调施工工艺 1、CRTSⅡ型板精调采用技术标准及主要技术要求 1.1 采用标准 ⑴、《客运专线无砟轨道铁路工程施工质量验收暂行标准》(铁建设 [2007]85号); ⑵、《高速铁路CRTSⅡ型板式无砟轨道施工质量验收暂行标准》(铁建设【2009】218 号文); ⑶、《客运专线铁路无碴轨道铺设条件评估技术指南》(铁建设[2006]158 号); ⑷、《高速铁路工程测量规范》(TB 10601-2009); ⑸、《高速铁路无砟轨道工程施工精调作业指南》铁建设函【2009】674号 2.2主要技术要求 CRTSⅡ型板(博格板)精调的基础是:每块CRTSⅡ型板结构上具有10对在工厂经过精确打磨过的承轨槽;CRTSⅡ型板调板时控制点为相对精度能够达到平面0.2mm、高
目录 摘要.......................................................................................................................................I Abstract...............................................................................................................................II 第1章 绪论.. (1) 1.1自旋电子学 (1) 1.2 磁纳米结构 (5) 1.3 磁纳米结构中电子自旋极化效应 (8) 1.4 硕士学位论文的研究工作 (11) 第2章 研究方法和理论 (13) 2.1 改进的转移矩阵法 (13) 2.2Landauer-Büttiker超微结构电导理论 (16) 2.3 本章小结 (18) 第3章 自旋-轨道耦合调制下磁垒纳米结构中电子自旋极化效应 (19) 3.1 引言 (19) 3.2 模型和公式 (20) 3.3 结果和讨论 (23) 3.4 本章小结 (30) 第4章 自旋-轨道耦合调制下复合磁电垒纳米结构中电子自旋极化效应 (31) 4.1 引言 (31) 4.2 模型和公式 (32) 4.3 结果和讨论 (36) 4.4 本章小结 (42) 第5章 结论与展望 (44) 参考文献 (46) 个人简历、申请学位期间的研究成果及发表的学术论文 (52) 致谢 (53) III 万方数据
轨道现场调整方法 一、现场调整 首先明确基本轨,然后现场调整对照调整量表,按“先高低、后水平;先方向,后轨距”的原则进行精调施工。每个作业面分为两个调整小组,一组调高程,一组调轨向。 1、高程调整 根据调整方案和对应的轨枕号首先用石笔在基准轨表面或轨腰处标记调整量。标示要有专人复核。 根据现场的标示,把调整件准确无误的摆放在承轨台的两侧。调整件摆放要有专人复核,摆放要整齐,以便于更换。 高程调整时,不能同时松开两股钢轨的扣件,应先固定一根钢轨作为参照,松开另外一根。每次松开扣件数量不得连续超过10个扣件。松开扣件之前应先用电子道尺检查轨距、水平相对关系并记录读数确定调整后的数据,用以检查调整是否到位。 ①、钢轨高低位置正调整时,可采用轨下调高垫板或铁垫板下调高垫板进行。 采用轨下调高垫板进行调整时,先松开弹条,取出绝缘块,提升钢轨,在轨下垫板和铁垫板间垫入所需厚度的轨下调高垫板(轨下调高垫板的型号分别为0.5mm、1mm、2mm、5mm、8mm),钢轨落下后再用可控扭矩的扳手或机具扭紧螺母,使弹条安装到位。轨下垫板总厚度不得超过10mm,数量不得超过2块,并把最薄的垫板放在下面,以防止下调高垫板窜出。当调高量需0.5mm级别时,可紧贴铁垫板承轨面加垫0.5mm厚的轨下调高垫板,
数量可为3块。 采用铁垫板下调高垫板进行调整时,先卸下锚固螺栓,提升钢轨,在铁垫板和绝缘缓冲垫板之间垫入需要厚度的铁垫下调高垫板,钢轨复位后检查轨向和轨距,必要时进行调整,确认合适后用可控扭矩的扳手机具以300-350N.m的扭矩扭紧锚固螺栓,铁垫板下调高垫板总厚度不得超过16mm,数量不得超过2块。 ②、钢轨高低位置负调整时,应先卸下锚固螺栓,提升钢轨,将铁垫板下6mm厚的绝缘缓冲垫更换为2mm的绝缘缓冲垫,钢轨复位后检查轨向和轨距,必要时进行调整,确认合适后用可控扭矩的扳手或机具以300-350N.m的扭矩扭紧锚固螺栓,然后根据调整量,在轨下垫板和铁垫板间垫入所需厚度的轨下调高垫板。 钢轨高低位置调整范围-4~+26mm,施工调整范围为-4~+6mm,可按下表选用所需厚度的绝缘缓冲垫板和调高垫板进行调整。
车辆-轨道耦合动力学理论在轨道下沉变形 研究中的应用1 高建敏,翟婉明 西南交通大学牵引动力国家重点实验室,四川成都(610031) E-mail:jianmingao04@https://www.doczj.com/doc/022287890.html, 摘要:提出了将车辆-轨道耦合动力学理论引入轨道下沉变形研究的分析方法。通过将车辆-轨道垂向耦合振动模型和轨道累积下沉计算模型相结合,以轨道结构动力学响应参量和轨面高低不平顺状态变化等作为两者间的联结纽带,从车辆-轨道耦合动力学角度研究了轨道的下沉变形特性。研究结果表明,随着轨道动荷载重复作用次数的增加,轨道下沉量逐渐累积,轨面初始不平顺对轨道下沉变化影响较大。车辆-轨道耦合振动系统和轨道下沉变形处于特定的相互作用过程之中,受轨道累积下沉变形的影响,轮轨力、轨道结构响应加剧。 关键词:车辆;轨道;动力学;累积变形;下沉 中图分类号:U260.11 1. 引言 铁路有碴轨道在运营使用过程中,由于其自身特点,会不可避免地产生残余变形。这种残余变形随着列车荷载的反复作用,逐渐累积,最终导致轨道结构的下沉。轨道累积下沉快慢及下沉量大小直接关系到轨道的维修模式和成本[1]。因此,研究轨道的下沉变形累积特性,预测下沉发展趋势,对经济、合理地安排轨道养护维修,保证列车安全、平稳、不间断运行,具有重要意义。 有关轨道下沉变形的研究最初以试验研究为主,英国、日本、前苏联等国均通过大量试验和现场调查,建立了各自的轨道下沉(主要是道床)计算模型[2~5],我国在道床下沉计算模型方面也有研究,但相对较少[1,6]。近年来,随着计算机技术的大力发展,使大型仿真分析研究成为可能,研究人员开始探索利用计算机仿真技术,通过数值算法,从理论角度深入研究有如轨道下沉这样的复杂问题,代表性国家主要有英国、瑞典和日本[7~9]。国内在轨道下沉仿真分析方面开展的研究甚少,至今尚未看到较为相关的文献资料。因此,本文在国外研究经验基础上,基于车辆-轨道耦合动力学理论和轨道下沉变形法则,通过将车辆-轨道耦合振动系统和轨道下沉变形相联结,开展了有关轨道动态下沉变形特性以及车辆-轨道耦合振动系统与轨道下沉变形间相互影响关系的研究。 2 研究方法及仿真计算模型 2.1 轨道下沉研究方法 铁路运输属轮轨系统运输模式,车辆与轨道系统处于特定的耦合振动形态之中,车辆与轨道相互作用,轨道几何形位的变化,轨道结构的变形和损伤,是车辆系统和轨道系统相互作用再加上外界自然因素的影响而形成的。轨道的下沉变形是由于列车-轨道相互作用产生的轨道动荷载诱发而产生的,而轨道下沉变形结果又会叠加于原始轨道形态之上,进一步影响到车辆与轨道动态作用。可见,轨道的下沉变形和车辆-轨道耦合系统之间是一个相互作用的过程,研究轨道的下沉变形离不开对车辆-轨道耦合振动系统的分析和研 1. 本课题得到教育部创新团队计划资助(IRT0452)、国家博士学科点基金项目(20030613011)和西南交通大学博士创新基金的资助。
长昆(沪昆)铁路客运专线湖南段IV标段 目录 1 工程概况 (1) 2编制依据 (1) 3 施工准备 (2) 3.1控制网复核 (2) 3.2资料复核 (2) 3.3测量人员及设备 (2) 3.4扣件安装 (3) 3.5、粗调 (3) 4轨道精调测量 (3) 4.1 数据输入 (4) 4.2仪器检校 (4) 4.3全站仪设站 (5) 4.4精调小车安装 (6) 4.5轨道精调测量 (6) 5 注意事项 (7) 页脚内容8
贵广铁路GGTJ-11标段无砟轨道精调方案 1 工程概况 我标段负责施工的新建贵阳至广州铁路GGTJ-11标段DK690+815~DK746+842.47范围,正线2×55.933km、站线2×1.95km,包括桥、路底座和支承层在内的CRTSI型双块式无砟轨道工程。其中:正线桥梁45座/14.622Km,隧道27座34.566Km,明洞3座0.648/km,路基6.097Km。CRTS I型双块式无砟轨道结构自上而下依次由:钢轨、扣件、轨枕、道床板和底座板或支撑层构成。 钢轨:钢轨采用60kg/m、12.5m工具轨,钢轨质量符合相关技术要求。 扣件:采用WJ-8A型弹性扣件,扣件支点间距一般为650mm,施工时可根据道床板分段情况合理调整,但不宜小于600mm;梁缝处最大扣件节点间距按700mm控制,但不应连续设置。 轨枕:采用SK-2型双块式轨枕,中铁七局集团轨枕厂厂内预制 2编制依据 1、《高速铁路轨道工程施工质量验收标准》TB10754-2010; 2、《高速铁路工程测量规范》TB10601-2009; 3. 《铁路工程测量规范》TB10101-2009; 4、新建贵阳至广州铁路有关设计文件,设计图纸; 3 施工准备 3.1控制网复核 精调测量前,检查确认CPIII控制点工作状态良好,其精度符合精调作业要求。对被破坏的CPIII控制点应及时恢复,并拉入整网进行平差。连续梁上的控制点必须在精调前进行复核测量,精度不满足要求时,应在精调前一天
VASP自旋轨道耦合计算错误汇总 静态计算时,报错: VERY BAD NEWS!Internal内部error in subroutine子程序IBZKPT: Reciprocal倒数的lattice and k-lattice belong to different class of lattices.Often results are still useful (48) INCAR参数设置: 对策:根据所用集群,修改INCAR中NPAR。将NPAR=4变成NPAR=1,已解决! 错误:sub space matrix类错误 报错:静态和能带计算中出现警告:WARNING:Sub-Space-Matrix is not hermitian共轭in DAV 结构优化出现错误: WARNING:Sub-Space-Matrix is not hermitian in DAV4-4.681828688433112E-002 对策:通过将默认AMIX=0.4,修改成AMIX=0.2(或0.3),问题得以解决。 以下是类似的错误: WARNING:Sub-Space-Matrix is not hermitian in rmm-3.00000000000000 RMM:22-0.167633596124E+02-0.57393E+00-0.44312E-0113260.221E+00BRMIX: very serious problems the old and the new charge density differ old charge density:28.00003new28.060930.111E+00 错误: WARNING:Sub-Space-Matrix is not hermitian in rmm-42.5000000000000 ERROR FEXCP:supplied Exchange-correletion table is too small,maximal index:4794 错误:结构优化Bi2Te3时,log文件: WARNING in EDDIAG:sub space matrix is not hermitian1-0.199E+01 RMM:2000.179366581305E+01-0.10588E-01-0.14220E+007180.261E-01 BRMIX:very serious problems the old and the new charge density differ old charge density:56.00230new124.70394 66F=0.17936658E+01E0=0.18295246E+01d E=0.557217E-02 curvature:0.00expect dE=0.000E+00dE for cont linesearch0.000E+00 ZBRENT:fatal error in bracketing please rerun with smaller EDIFF,or copy CONTCAR to POSCAR and continue 但是,将CONTCAR拷贝成POSCAR,接着算静态没有报错,这样算出来的结果有问题吗? 对策1:用这个CONTCAR拷贝成POSCAR重新做一次结构优化,看是否达到优化精度! 对策2:用这个CONTCAR拷贝成POSCAR,并且修改EDIFF(目前参数EDIFF=1E-6),默认为10-4 错误: WARNING:Sub-Space-Matrix is not hermitian in DAV1-7.626640664998020E-003 网上参考解决方案: 对策1:减小POTIM:IBRION=0,标准分子动力学模拟。通过POTIM控制步长。 POTIM:当IBRION=1,2或3时,是力的一个缩放常数(相当于确定原子每步移动的大小),默认值为0.5。 对策2:改IBRION=1,采用准牛顿算法来优化原子的位置。 原IBRION=2,采用共轭梯度算法来优化原子的位置 对策3:修改ISMEAR 对策4:换成CG弛豫(共轭梯度算法)IBRION=2(决定结构优化过程中,原子如何移动或弛豫) IBRION=2离子是否运动,1不运动但做NSW外循环。0动力学模拟,1准牛顿法离子弛豫 2CG法离子弛豫,3采用衰减二阶运动方程离子弛豫, INCARrelax中设置IBRION=2,未解决! 对策5:用的CG算符,出现的错误是CG算符不能算,在INCAR中加上IALG=Fast(电子优化采用blocked Davidson 方法[IALGO=38:IALG=Normal]和RMM-DIIS算法[IALGO=48:IALG=Very_Fast]混合)试一试
有砟轨道精调方案 摘要:本文主要综合现有有砟轨道精调技术,从设计方案入手,阐述有砟轨道精调必备的条件及精调方法,减少因前期施工方法不当,造成后期轨道精调任务加重,甚至精调不能进一步进行的问题。 关键词:有砟轨道精调200km/h 引言 目前国内铁路分为普通铁路、客运专线、高铁等几种,普铁及客专均采用有砟轨道,高铁采用无砟轨道,有砟轨道最高时速为250km/h,因有砟轨道道床稳定性相对较差,给有砟轨道速度提升造成很大困难。如在轨道施工前,方案不合理,造成前期施工道床稳定性不够,会造成精调工作的无法进行,使资源浪费及成本增加。所以设计一份好的施工方案显得尤为重要。本文结合柳南客运专线施工,对有砟轨道精调问题进行阐述。 二、工程概况 柳南客运专线是湘桂铁路的重要组成部分,是广西东出至华东北上至华北等地区的主要骨架铁路,也是广西与珠三角地区交流的重要铁路运输通道。对加强中心城市与周边城市之间的联系,缩短城市间的时空距离,推动区域经济技术联合与协作,促进经济社会发展具有重要意义。 线路北起进德站南宁端(D1K546+200),南至南宁站昆明端(K791+000),线路全长212.409km,沿途经过进德、凤凰、来宾、小平阳、黎塘,南至南宁站。 设计标准:正线一次铺设跨区间无缝线路,全线采用有砟轨道;列车设计速度:200km/h及以上。 三、轨道精调方案设计 ㈠设计依据 新建铁路柳州至南宁客运专线施工图 客运专线铁路工程静态验收指导意见(铁建设[2009]183号) 《高速铁路轨道工程施工技术指南》(铁建设[2010]241号) 《高速铁路轨道工程施工质量验收标准》(TB10754-2010) 《铁路技术管理规程》(铁道部令第29号)
客运专线CRTSII 型板式无砟轨道精调方法步骤摘要:CRTSII型板式无砟轨道精调是关系到列车运行速度是否能达到设计要求的重要因素,结合京石铁路客运专线施工。重点阐述了无砟轨道精调的施工工艺和注意事项,并指出了轨道板精调作业对于整个高铁工程的主要性。 关键词:客运专线,CRTSII型无砟轨道,精调 1.引言 我国高速铁路的轨道技术主要是无砟轨道结构和有砟轨道结构,现阶段基本以无砟轨道结构为主,其中CRTS II型板式无砟轨道普遍应用在京津城际铁路、京石客专、京沪高速铁路和沪杭高速铁路上。CRTS II型板式无砟轨道采用了连续底座混凝土结构和轨道板纵联方式,现场施工作业简单方便、可靠性好。 轨道板精调是指通过调整轨道板的高度及平面状态,使各螺栓孔位置精确安置,从而保证扣件的安放精度,减少扣件安放后轨道的调整量。 2.技术标准 (1)《高速铁路设计规范》 (2)《高速铁路工程测量规范》 (3)《客运专线轨道几何状态测量仪暂行技术条件(科技基[2008]86号)》 (4)《客运专线铁路工程静态验收指导意见(铁建设[2009]183号)》 (5)《高速铁路联调联试及运行试验指导意见(铁集成[2010]166号)》 (6)《京石客专、石武客专(河北段)轨道精调作业标准、组织方案及作业流程实施细则》。 根据“细则”的要求,按照以下几何状态控制标准进行作业标准控制,如表1所示: 表1. 几何状态控制标准
3.施工要求 轨道测量前,认真核对CPⅢ坐标、轨道设计线型设计要素数据输入正确,确保测量仪器校核无误,设站精度达到要求,钢轨、扣件无污染,焊缝平顺,扣件扭矩和扣压力达到设计要求。 测量一般选在阴天或夜间进行,严禁在高温、雨天、大雾、大风等条件下测量,避免测量误差过大和出现假数据。 测量数据模拟调整前,必须保证数据的真实、可靠性。扣件更换前做出相应标识,并用弦绳和道尺做必要的复核。 更换扣件时,当实际轨温在于锁定轨±10℃以内施工作业,当高于锁定轨温20℃禁止作业,每次拆除扣件不得连续超过10—12个承轨台(防止胀轨),更换扣配件钢轨抬高量小于25mm,确保扣件更换能达到预期目的和平滑过渡。 扣件更换结束后,再次核对调整量和扣件规格,确认无误后按规定力矩上紧螺栓,回收
自旋-轨道作用[编辑] 在量子力学里,一个粒子因为自旋与轨道运动而产生的作用,称为自旋-轨道作用(英语:Spin–orbit interaction),自旋-轨道效应或自旋-轨道耦合。最著名的例子是电子能级的位移。电子移动经过原子核的电场时,会产生电磁作用.电子的自旋与这电磁作用的耦合,形成了自旋-轨道作用。谱线分裂实验明显地侦测到电子能级的位移,证实了自旋-轨道作用理论的正确性。另外一个类似的例子是原子核壳层模型(shell model)能级的位移。 半导体或其它新颖材料常常会涉及电子的自旋-轨道效应。自旋电子学专门研究与应用这方面的问题。 目录 [隐藏] 1 电子的自旋-轨道作用 1.1 磁场 1.2 磁矩 1.3 哈密顿量微扰项目 1.4 能级位移 2 参阅 3 参考文献 4 外部链接 电子的自旋-轨道作用[编辑] 在这篇文章里,会以相当简单与公式化的方式,详细地讲解一个束缚于原子内的电子的自旋-轨道作用理论。这会用到电磁学、非相对论性量子力学、一阶微扰理论。这自旋-轨道作用理论给出的答案,虽然与实验结果并不完全相同,但也相当的符合。更严峻的导引应该从狄拉克方程开始,也会求得相同的答案。若想得到更准确的答案,则必须用量子电动力学来计算微小的修正。这两种方法都在本条目范围之外。 磁场[编辑] 虽然在原子核的静止参考系 (rest frame) ,并没有磁场;在电子的静止参考系,有磁场存在。暂时忽略电子的静止参考系不是惯性参考系,则根据狭义相对论[1],磁场是 ;(1) 其中,是电子的速度,是电子运动经过的电场,是光速。 以质子的位置为原点,则从质子产生的电场是 ; 其中,是质子数量(原子序数),是单位电荷量,是真空电容率,是径向单位矢量,是径向距离,径向矢量是电子的位置。 电子的动量是 ; 其中,是电子的质量。 所以,作用于电子的磁场是 ;(2)
新建铁路石家庄至武汉客运专线(河北段) SZ-3标桥梁工程 编号: 桥梁CRTSⅡ型板式无砟轨道 轨道板精调施工作业指导书 单位: 编制: 审核: 批准: 年月日发布年月日实施
目录 1.适用范围.................................................... - 2 - 2.作业准备.................................................... - 2 - 3.技术要求.................................................... - 2 - 4.精调程序及工艺流程.......................................... - 2 -4.1 精调程序.................................................... - 2 - 4.2 工艺流程.................................................... - 2 - 5.施工要求.................................................... - 3 -5.1 施工准备.................................................... - 3 -5.2施工工艺.................................................... - 3 -5.3精调操作步骤................................................ - 6 -5.4精调成果的评估............................................. - 11 -5.5精调技巧................................................... - 12 -5.6精调辅助设施............................................... - 12 -6.主要精调设备、人员及材料.................................. - 13 - 6.1主要施工机具............................................... - 13 -6.2精调人员................................................... - 14 - 6.3材料要求................................................... - 14 - 7、质量控制及检验............................................ - 14 -7.1 质量标准................................................... - 14 - 7.2 质量控制要点............................................... - 14 - 8、安全及环保要求............................................ - 15 -8.1安全要求................................................... - 15 -8.2、环保要求.................................................. - 15 -