
SJ6000激光干涉仪产品具有测量精度高、测量速度快、测量范围大、分辨力高等优点。通过与不同的光学组件结合,可以实现对线性、角度、平面度、直线度(平行度)、垂直度、回转轴等参数的精密测量,并能对设备进行速度、加速度、频率-振幅、时间-位移等动态性能分析。
在相关软件的配合下,可自动生成误差补偿方案,为设备误差修正提供依据。
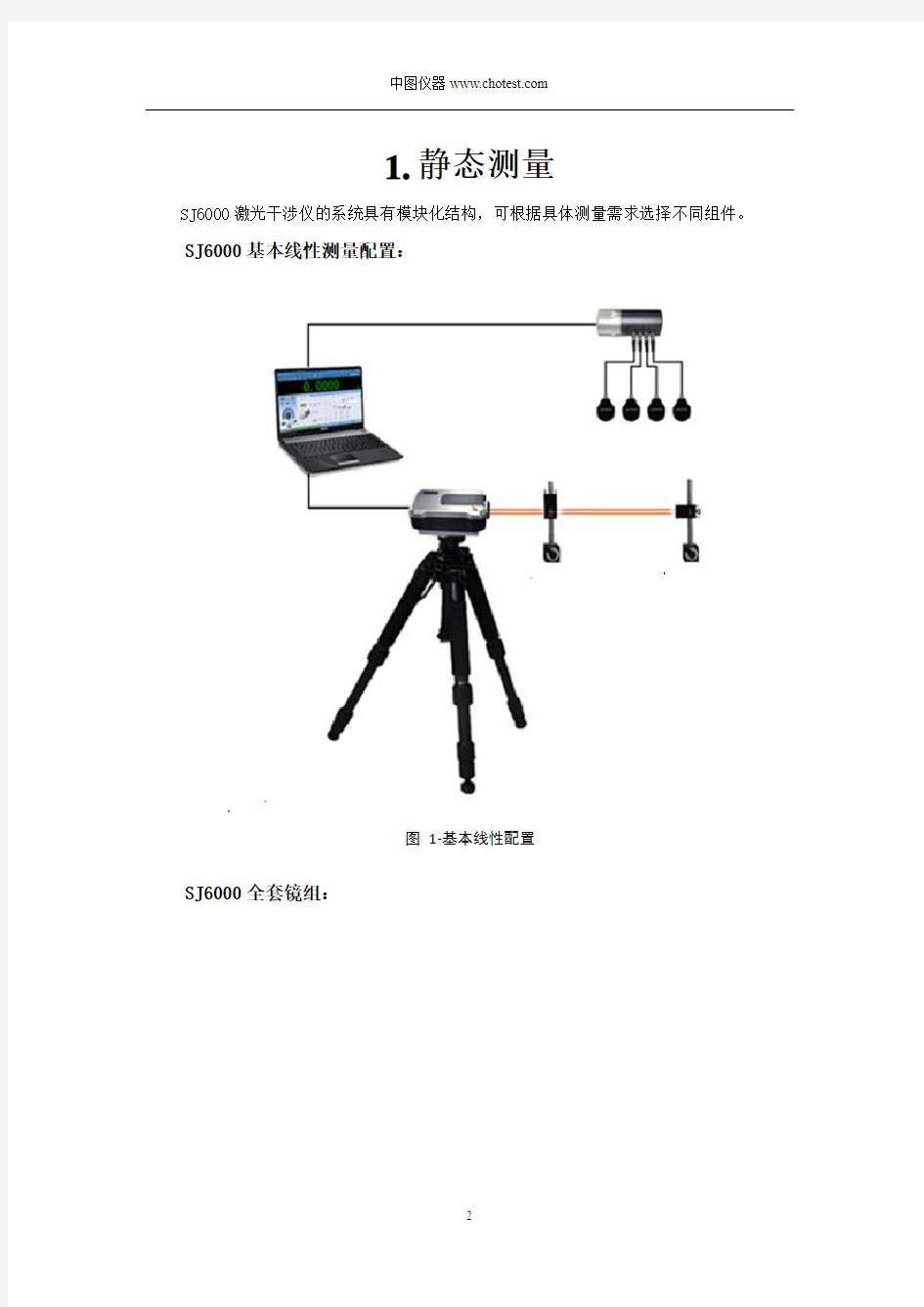
1.静态测量
SJ6000激光干涉仪的系统具有模块化结构,可根据具体测量需求选择不同组件。SJ6000基本线性测量配置:
图1-基本线性配置
SJ6000全套镜组:
图2-SJ6000全套镜组
镜组附件:
图3-SJ6000 镜组附件
镜组安装配件:
图4-SJ6000 镜组安装配件
1.1. 线性测量
1.1.1. 线性测量构建
要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,组装成“线性干涉镜”。线性干涉镜放置在激光头和线性反射镜之间的光路上,用它的反射光线形成激光光束的参考光路,另一束光入射到线性反射镜,通过线性反射镜的线性位移来实现线性测量。如下图所示。
图5-线性测量构建图
图6-水平轴线性测量样图图7-垂直轴线性测量样图
1.1.
2. 线性测量的应用
1.1.
2.1. 线性轴测量与分析
激光干涉仪可用于精密机床、三坐标的定位精度、重复定位精度、微量位移精度的测量。测量时在工作部件运动过程中自动采集并及时处理数据。
图8-激光干涉仪应用于机密机床校准
图9-激光干涉仪应用于三坐标机校准
SJ6000软件内置10项常用机床检验标准,自动采集完数据后根据所选标准自动计算出所需误差数据,可生成误差补偿表,为机床、三坐标的误差修正提供依据。
图8-数据采集界面
图9-数据处理界面
图10-数据分析曲线界面
1.1.
2.2. 高精度传感器校准
利用激光干涉仪对位移传感器检定成为发展趋势,其特点是反应速度快、测量精度高。
图10-激光干涉仪应用于传感器校准
1.1.
2.
3. 实验室标准器
激光干涉仪是当今精度最高的测长仪器,因光波具有可以直接对米进行定义且容易溯源的特点,因此国家实验室多用激光干涉仪做实验室标准器进行量值传递。
图11-激光干涉仪应用于实验室
1.1.
2.4. 轻型线性附件的应用
对于光学镜重量或尺寸可能影响机器动态性能或光学镜安装遇到困难的应用场合,中图仪器提供的轻型线性附件,其小角锥反射镜重量在8g以内,可直接吸附在测量设备上,以此降低镜组附件重量对机器测量的影响。详见下图:
图12-轻型线性附件
图13-轻型线性附件应用于测长机实例
图14-轻型线性附件应用于螺纹机测量实例
1.1.
2.5. 可调转向镜的使用
可调转向镜可以把水平光线倾斜20°以上的角度,用于倾斜机床、三坐标机的测
量。
图15倾斜机床的定位精度检测
1.1.
2.6. 测头夹具的使用
测头夹具能固定在φ32mm的三坐标探头上,方便固定线性反射镜。
1.2. 角度测量
1.2.1. 角度测量构建
与线性测量原理一样,角度测量需要角度干涉镜和角度反射镜,测试时角度反射镜和角度干涉镜必须有一个相对旋转,相对旋转后两束光的光程差就会发生变化,而光程差的变化会被SJ6000激光干涉仪探测器探测出来,由软件将线性位置的变化转换为角度的变化显示出来。
图16-角度测量原理及测量构建
图17水平轴俯仰角度测量样图图18-2水平轴偏摆角度测量样图
1.2.2. 角度测量的应用
1.2.2.1. 小角度精密测量
激光干涉仪角度镜能实现±10°以内的角度精密测量。
图19-小角度测量实例
1.2.2.2. 准直平台/倾斜工作台的测量
由于角度镜组的不同安装方式,其测量结果代表不同方向的角度值。您可以结合实际需要进行安装、测量。
图20-水平方向角度测量
图21-垂直方向角度测量
在垂直方向的角度测量中,角度反射镜记录下导轨在不同位置时的角度值,可由软件分析出导轨的直线度信息,实现角度镜组测量直线度功能。
1.3. 直线度测量
1.3.1. 直线度测量构建
SJ6000激光头射出后的激光由直线度干涉镜以一定的小角度分为两束,并入射到直线度反射镜中。经直线度反射镜反射后,沿着新光路返回到直线度干涉镜中,经直线度干涉镜合束后返回激光头的进光口,当直线度干涉镜偏离光线,则两光束产生光束差,由激光干涉仪探测器探测出来,由软件计算显示出来。
图22-直线度测量原理
在直线度测量过程中,一般尽可能的采用直线度干涉镜相对于直线度反射的运动,这样操作有利于提高测量的准确性和精度。
图23-直线度测量构建
1.3.
2. 直线度干涉镜的连接
SJ6000直线度干涉镜提供两种连接方式。除通过夹紧块连接外,还可以通过直线度附件中的M8连接头连接。
图24直线度附件-M8连接头以及应用
1.3.3. 直线度测量应用
由于导轨磨损、事故造成的导轨损坏以及地基不牢导致的导轨弯曲等,会对机器的定位、加工精度带来直接的影响。直线度测量可以显示出机器导轨的弯曲的情况,并可由生成的直线度误差对机器的性能做出评价和补偿。
直线度测量可以对水平面和垂直面进行测量,这取决于直线度干涉镜和反射镜安装的方法。
1.3.3.1. 机器轴、直线导轨测量
当需要测量导轨较长时,传统的直接测量方法无法提供这样的测量长度和精度。
测量建议将质量较轻的直线度干涉镜作为移动部件,因为较重的反射镜的移动可能会对测量的准确性产生影响。
图25-直线导轨左右方向直线度测量
图26-直线导轨上下方向直线度测量
1.3.3.
2. 机床工作台直线度测量
测量时,直线度反射镜固定,直线度干涉镜安装在移动的工作台上,通过直线度干涉镜的移就可以测量工作台的直线度。
图27-机床平台左右方向直线度测量
图28-机床平台上下方向直线度测量
图29-小型工作台直线度测量
1.4. 垂直度测量
1.4.1. 垂直度测量构建
垂直度的测量是直线度测量在二维方向上的延伸,进行垂直度测量就是在同一基准上对两个标称正交轴分别进行直线度的测量。然后对两个轴的直线度进行比较,得出两个轴的垂直度。
共同的参考基准通常指的是两次测量时反射镜的光学准直轴,在两次测量过程中既不移动、也不调整,光学直角尺用于至少一次测量中,允许调整激光束与直线度的准直,而不动直线度反射镜。
垂直度误差= 棱镜误差- (倾斜度1 + 倾斜度2)
图30-垂直图测量构建
1.4.
2. 垂直度测量应用
1.4.
2.1. 机器轴垂直度误差测量(数控机床、坐标测量机等)
垂直度测量通过比较直线度值从而确定两个标称正交坐标轴的垂直度。垂直度误差可能是导轨磨损、机器地基差或双驱动机器上的两原点传感器未准直造成的。垂直度误差将对机器的定位精度及插补能力产生直接影响。
一般情况下对于超过1.5米长的机器轴,使用激光干涉仪这样的光学方法是唯一的选择,因为传统的实物基准,如直角尺(金属或大理石等) 的长度一般局限于1米的范围内。
1.4.
2.2. X,Y轴垂直度对准
X,Y工作台和水平面垂直度测量:不管是什么类型的XY平台,包括龙门型或者混合型或者其他类型的XY平台,无论是大型或者小型平台,重要的是有一个共同的参考基准,如图31所示的直线度反射镜,测量过程中直线度反射始终镜保持不动。
图31-机床垂直度测量
1.4.
2.
3. 带Z轴的垂直度测量
对于涉及带Z轴的垂直度测量,需要额外的增加直线度的附件,主要包括一个大角锥反射镜、一个垂直转向镜、一个直线度底座。
图32-直线度附件-大角锥反射镜、垂直转向镜、直线度底座
图33-机床垂直度测量
1.5. 平面度测量
1.5.1. 平面度测量原理
平面测量是在角度测量的基础上做的延伸,利用角度测量的附件记录下一系列平面位置角度,再转化为高度的变化。一般按照对角线的方法测量出平台上不同位置的高度变化值,提供软件计算得到整个平台的平面度。
图34-平面度测量原理
图35-平面度测量分析
1.5.
2. 平面度应用及方法
测量一个平面的平面度,需要在平面上采集若干条测量直线,平面度测量有常用的方法为:对角线法,又称米字法
图36-平面度测量方法
对角线法测量平面度时,若激光头位于G点出,光线射向E点时,建议按照EA、CA、DH、EG、AG、BF、CE、GC的次序进行测量。
图37-大理石平台平面度测量实例
SJ6000激光干涉仪产品具有测量精度高、测量速度快、测量范围大、分辨力高等优点。通过与不同的光学组件结合,可以实现对线性、角度、平面度、直线度(平行度)、垂直度、回转轴等参数的精密测量,并能对设备进行速度、加速度、频率-振幅、时间-位移等动态性能分析。 在相关软件的配合下,可自动生成误差补偿方案,为设备误差修正提供依据。
1.静态测量 SJ6000激光干涉仪的系统具有模块化结构,可根据具体测量需求选择不同组件。SJ6000基本线性测量配置: 图1-基本线性配置 SJ6000全套镜组:
图2-SJ6000全套镜组 镜组附件: 图3-SJ6000 镜组附件 镜组安装配件: 图4-SJ6000 镜组安装配件
1.1. 线性测量 1.1.1. 线性测量构建 要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,组装成“线性干涉镜”。线性干涉镜放置在激光头和线性反射镜之间的光路上,用它的反射光线形成激光光束的参考光路,另一束光入射到线性反射镜,通过线性反射镜的线性位移来实现线性测量。如下图所示。 图5-线性测量构建图 图6-水平轴线性测量样图图7-垂直轴线性测量样图 1.1. 2. 线性测量的应用 1.1. 2.1. 线性轴测量与分析 激光干涉仪可用于精密机床、三坐标的定位精度、重复定位精度、微量位移精度的测量。测量时在工作部件运动过程中自动采集并及时处理数据。
图8-激光干涉仪应用于机密机床校准 图9-激光干涉仪应用于三坐标机校准 SJ6000软件内置10项常用机床检验标准,自动采集完数据后根据所选标准自动计算出所需误差数据,可生成误差补偿表,为机床、三坐标的误差修正提供依据。
双频外差激光干涉仪 班级名:应用物理学1401班 作者:U201410186 赵润晓 同组成员:U201410187 王羽霄 实验时间:2016年11月30日
摘要:本实验在分析双频外差激光干涉仪的基础上,构建光路,实现了利用双频干涉侧脸位移量的功能。 关键词:双频外差激光干涉仪声光调制器光路构建 一、引言 【实验目的及原理】 1.实验目的。 ①了解双频外差激光干涉仪(dual-frequency heterodyne interferometer)的工作原理。 ②熟悉各种光学镜片的功能及原理。 ③熟悉双频外差干涉仪基本光路的设计和搭建,通过声光调制器(或称声光移频器)产生双频激光光束,并观察干涉仪的干涉信号。 2.实验原理。 激光的发明使得精密测量有了新的发展方向,用激光测量长度(位移或距离)主要方法有两种。一是以迈克尔逊干涉仪为基础的单频干涉仪;另一种是双频激光干涉仪。 ①单频激光干涉仪,从激光器发出的光束经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来,会合在分光镜上而产生干涉现象。当可动反射镜移动时,干涉条纹的光强变化由接受器中的光电转换元件(光电传感器)和电子线路(信号放大器)等转换为电压信号;然后经整形、放大后输入信号采集系统算出相位差,最后再由相位差算出可动反射镜的位移量(一个周期对应半波长)。由于激光频率甚高(1014Hz量级),无法直接测量光的相位,光程差检测的传统方法都是干涉强度法,即测量由相位差所引起的光干涉信号的强度变化,间接地测量光程差。 单品激光干涉仪因此具有稳定性差的缺点。许多内部(电子噪声和长期漂移等)和外部因素(环境变化,如温度、大气压力、折射率等的变化)都会对测量结果产生影响。 ②目前高精度的激光干涉仪大多为双频激光干涉仪,产生双频激光的方法主要是利用塞曼效应(Zeeman Effect)和声光调制器(Acousto-Optical Modulators,AOM)。塞曼效应受频差闭锁现象影响,产生的双频频差一般较小,通常最大频差不超过4MHz。声光调制方法得到的频差通常较大,一些产品双频激光频差达到20MHz以上。双频激光干涉仪是应用直接测量两个信号的相位差来决定位移的。这种位移(亦即光程差)信息载于两种频率光束干涉后产生的拍频信号上;因此,对由光强变化引起的直流电平变化不敏感,所以抗干扰能力强。它常用于检定测长机、三坐标测量机、光刻机和加工中心等的坐标精度,也可直接用作测长机、高精度三坐标测量机等的测量系统。利用相应附件,还可进行高精度直线度测量、平面度测量和小角度测量。 本实验运用的是基于声光调制器的双频外差激光干涉仪。见图1。氦氖激光器输出的激光光束通过分光镜BS1分成两束,分别经过声光移频器产生频率为f1和f2的光束(原理参考背景知识)。两束光再分别通过分光镜BS2和BS4各自分成两束,频率f1和f2的光束经过分光镜反射后产生干涉,形成参考光束,并通过光电探测器PD1接收干涉信号。另外,透过BS2和BS4的f1
激光检测技术研究现状与发展趋势 提要:激光检测学科发展现状在光电检测领域,利用光的干涉、衍射和散射进行检测已经有很长的历史。由泰曼干涉仪到莫尔条纹,然后到散斑,再到全息干涉,出现了一个个干涉场,物理量(如位移、温度、压力、速度、折射率等)的测量不再需要单独测量,而是整个物理量场一起进行测量。自从激光出现以后,电子学领域的许多探测方法(如外差、相关、取样平均、光子计数等)被引入,使测量灵敏度和测量精度得到大大提高。用激光检测关键技术(激光干涉测量技术、激光共焦测量技术、激光三角测量技术)实现的激光干涉仪、激光位移传感器等,可以完成纳米级非接触测量。可以说,超精密加工技术将随着高精密激光检测技术的发展而发展;在此基础上,提出了激光测量需解决的关键技术及今后的发展方向。 1.测量原理 1.1激光测距原理 先由激光二极管对准目标发射激光脉冲。经目标反射后激光向各方向散射。部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,因此它能检测极其微弱的光信号。记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。
1.2激光测位移原理 激光发射器通过镜头将可见红色激光射向被测物体表面,经物体反射的激光通过接收器镜头,被内部的CCD线性相机接收,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度及已知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物体之间的距离。 2.激光测量系统的应用 激光功率和能量是描述激光特性的两个基本参数,激光功率计和能量计是最常用的两类激光测量仪器。随着激光技术的不断发展,对激光测试技术和测量仪器提出了更高要求。由于调Q和锁模激光的出现和应用,要求测量的激光功率已从毫瓦、瓦、千瓦、兆瓦直到千兆瓦以上。激光能量也从毫焦尔逐渐跨过千焦尔。脉冲激光的持续时间也由毫秒、微秒、毫微秒、而缩短至微微秒量级。光谱范围也从紫外、可见、红外扩展到近毫米波段。激光精密测量和某些生物医学方面的研究和应用(如眼科治疗、细胞手术器等)的发展,对激光测量的精度也提出了非常高的要求。 2.1激光非球面检测技术 长期以来,非球面检测技术一直制约着非球面制造精度的提高,尤其对于高精度非球面的检测。规的非球面检测方法如刀口阴影法、激光数字干涉法及接触式光栅测量法等,对于检测工件表面来说都有一定的局限性。原子力显微镜是利用纳米级的探针固定在可灵敏操控的微米级尺度的弹性悬臂上,当针尖很靠近样品时,其顶端的原子与
Radiation Harsh Application | 强辐射环境应用 强辐射环境下FPS3010激光干涉测量 Laser Interferometry in Radiation Harsh Environments using the FPS3010 介绍 目前,同步辐射应用已经扩展到多种邻域中,如生物科技(蛋白质晶体),医药研究(微生物),工程应用(高分辨率裂缝演变成像),高级材料研究(纳米结构材料)。在纳米领域许多应用中,如透镜组,布拉格反射器,狭缝以及目标定位等都需要非常高的分辨率。机械结构需要高集成度,高稳定性,并且要减小温漂以及定位误差的影响。另外,运动部件的质量需要严格控制到最低,从而提高机械特性,并且减小位置误差。 针对以上讨论,这意味着编码必须在待测物附近,也就是说,编码器即使不是在X光或者粒子束中,也需要安置在辐射区内。 FPS3010激光干涉仪最大的特点是皮米级分辨率,兼容真空环境,并且在此类应用中,可以采用远程控模块。因此,FPS3010可以工作在强辐射环境下,也就是将干涉仪系统以及子系统安装在同步辐射光源或者束线附近,以及其他高辐射的环境中。 在目前的传感器选型中,“M12”传感器探头可以工作在高达10MGy的辐射环境下。这个研究主要针对这些新型传感器的耐辐射强度。实验主要工作在60Co源下(1.17 MeV / 1.33 MeV γ- and 0.31 MeV β-rays)。实验证明在3MGy辐射强度下传感头的读数没有明显偏差。在第二步骤测试中,对比传感器头放置在10MGy强辐射环境前后,对固定目标的测量值。对比结果为传感器所得目标值没有明显偏差。将两个UHV真空兼容 M12传感头(一个是带AR膜透镜,一个是不带AR膜透镜),安装到聚酰亚胺光纤上,放置在1Gy/s辐射区域中。两个探测头都安装在铝支架上,实验过程中将会有20 nm/°C的温漂。为避免曝光情况,采用镀了金膜的耐辐射镜子,搭建3m反射腔。FPS3010控制器放置在探头测试腔体外,另一个带温控无辐射腔内。在整个测量周期内,腔内温度稳定性高于1℃。测试的最后,总累积量达3.024MGy。 测量 图2a显示在测试过程中,测得的位置值。编码器位置采样率为1kHz。在图中,每一个点为100次独立测量平均值。位置漂移观察周期为34天,采用镀膜传感器测量,3MGy累积量为150nm;未镀膜传感器3MGy累积量为400nm。由于信号保持性较好,所以测得位置值的不确定性(标准偏差)优于10nm。 在未镀膜传感器头,在累积总量达2MGy之后,漂移会略微增大(22.5天)。达到这点之后,可进行两个传感器头性能比较。图2b显示编码器(红线)以及控制器位置(蓝线)的温漂情况。整个周期中,温度漂移小于1℃。
双频激光干涉仪测量 激光干涉仪测长原理 典型的激光干涉仪由激光器L、偏振分光镜PBS测量反射镜M参考反射镜R、光电检测器D检偏器P和三个入14波片Q1、Q2和Q3组成。激光为线偏振光,经偏振分光镜分为E1和E2两线偏振光。当两干涉臂中入/4波片快轴(或慢轴)与X轴夹角相等且为45 度时,两束光通过入/4波片后均成为圆偏振光,反射后再次通过入/4波片,又转换为线 偏振光,但其振动方向相对原振动方向旋转了90度,且由于两干涉臂光程产生了相位差 0 ,根据公式: 0 =2 0 = 0 =4n L/ 入 式中:入为激光波长,干涉光路的作用是把位移L转变为合成光振动方向的旋转角 0,进而 转换成光电信号的相位0,信号处理器的作用就是测量出0 ,从而计算出位移L。 垂直度的测量工具在一台机器 施工实例:多轴系统 双频激光干涉仪的工作原理双频激光干涉仪其双频激光测量系统由氦氖双频遥置激光干涉仪和电子实时分解系统所组成。它具有以下优点:稳定性好,抗干扰能力强,可在较快的位移速度下测量较大的距离,使用范围广,使用方便,测量精度高。 基本原理:如图11-2 所示,激光双频干涉仪的氦氖激光管,在外加直流轴向磁场的作用下,产生塞曼效应,将激光分成频率为fl和f2,旋向相反的两圆偏振光,经入/4波 片变为线偏振光。调整入/4玻片的旋转角度,使 fl 和f2 的振动 平面相互垂直,以互垂直, 以作激光干涉 图11-2 双频激光干涉仪的工作原理图 1.激光管 2.入/4波片 3.参考分光镜 4.偏振分光棱境 5.基准锥体棱镜 6.移动测量棱体 7.10.12. 检偏振镜8.9.11. 光电管13. 光电调制器 仪的光源。当两个线偏振光经过参考分光镜3时(见图11-2),大部分则由偏振分光棱境4 分成两束。偏振面垂直入射面的f2 全反射到与分光镜固定在一起的基准锥体棱镜上;
激光测量技术研究现状与发展趋势授课教师:冯其波谢芳 学院:理学院 专业:光信息科学与技术 班级:光科0704班 姓名:杨涛 07272111 (组长) 颜川力 07272110 杨一帆 07272112 戴瑞辰 07272094 (副组长) 赵晓军 07272117 激光测量技术研究现状与发展趋势 光科0704:杨涛戴瑞辰杨一帆颜川力赵晓军 提要:激光检测学科发展现状在光电检测领域,利用光的干涉、衍射和散射进行检测已经有很长的历史。由泰曼干涉仪到莫尔条纹,然后到散斑,再到全息干 涉,出现了一个个干涉场,物理量(如位移、温度、压力、速度、折射率等)的测量不再需要单独测量,而是整个物理量场一起进行测量。自从激光出现以后, 电子学领域的许多探测方法(如外差、相关、取样平均、光子计数等)被引入,使测量灵敏度和测量精度得到大大提高。用激光检测关键技术(激光干涉测量技 术、激光共焦测量技术、激光三角测量技术)实现的激光干涉仪、激光位移传感 器等,可以完成纳米级非接触测量。可以说,超精密加工技术将随着高精密激光
检测技术的发展而发展;在此基础上,提出了激光测量需解决的关键技术及今 后 的发展方向。 Developing Situation of laser detection .In the field of photoelectric detection, there`ve been a long history of making a detection by using the principle of interference, diffraction and scattering of light. Interference field such as Tieman interferometer, Moire fringe, speckle and Holographic interferometry were designed one after another. Form then on, instead of measuring every physical quantity (displacement, temperature, pressure, velocity, refractive index) in turn, people measure the physical field entirely. After the development of laser, a number of detection methods (heterodyne, correlation, sample averaging, photon-counting) were invented, which lead to the improvement of the sensitivity and accuracy of the detection. People use the laser interferometer and Laser Displacement Transducer with key technologies of the laser detection to make nano-scaling non-contact measurement. It is clear that Super Precision Technology will raise to a new level according to the development of the High Precision laser detection; take which as the foundation, we advance the key technologies which belongs to the laser detection field, and also development direction of the field. 关键词:激光测量,扫描隧道显微镜,激光干涉仪,激光共焦测量技术 1 激光测量系统
光学干涉测量技术 ——干涉原理及双频激光干涉 1、干涉测量技术 干涉测量技术和干涉仪在光学测量中占有重要地位。干涉测量技术是以光波干涉原理为基础进行测量的一门技术。相干光波在干涉场中产生亮、暗交替的干涉条纹,通过分析处理干涉条纹获取被测量的有关信息。 当两束光亮度满足频率相同,振动方向相同以及相位差恒定的条件,两束光就会产生干涉现象,在干涉场中任一点的合成光强为: 122I I I πλ=++ 式中△是两束光到达某点的光程差。明暗干涉条纹出现的条件如下。 相长干涉(明): min 12I I I I ==+ ( m λ=) 相消干涉(暗): min 12I I I I ==+-, (12m λ? ?=+ ??? ) 当把被测量引入干涉仪的一支光路中,干涉仪的光程差则发生变化。通过测量干涉条纹的变化量,即可以获得与介质折射率和几何路程有关的各种物理量和几何量。 按光波分光的方法,干涉仪有分振幅式和分波阵面式两类。按相干光束传播路径,干涉仪可分为共程干涉和非共程干涉两种。按用途又可将干涉仪分为两类,一类是通过测量被测面与参考标准波面产生的干涉条纹分布及其变形量,进而求得试样表面微观几何形状、场密度分布和光学系统波像差等,即所谓静态干涉;另一类是通过测量干涉场上指定点干涉条纹的移动或光程差的变化量,进而求得试样的尺寸大小、位移量等,即所谓动态干涉。 下图是通过分波面法和分振幅法获得相干光的途径示意图。光学测量常用的是分振幅式等厚测量技术。 图一 普通光源获得相干光的途径 与一般光学成像测量技术相比,干涉测量具有大量程、高灵敏度、高精度等特点。干涉测量应用范围十分广泛,可用于位移、长度、角度、面形、介质折射率的变化及振动等方面的测量。在测量技术中,常用的干涉仪有迈克尔逊干涉仪(图二)、马赫-泽德干涉仪、菲索
实验二 双频激光干涉实验 一、 实验目的 了解双频激光干涉测量原理,设计测量长度与角度的干涉系统,并且比较一般干涉测量与双频激光干涉测量的异同。 二、 实验原理 1. 测长原理如图1所示: 其中L1 为稳频的激光器,Mm 、Mr 为两个全反射组件,P1、P2 为检偏器,D1、D2 为光电探测 器。Mm 固定在被测物体上。 输出激光含频差为f ?的两正交线偏振光分量1f 、2f 。输出光经分光镜 BS 后,一 部分光被反射,经检偏器 P 1, 两频率分量干涉产生拍频,该信号被光电探测器D1 接 收,形成参考信号 Sr 。透射光经线性干涉仪后,1f 、2f 被分开, 1f 进入参考臂,2f 进入测量臂,由两角锥棱镜反射返回后,在线性干涉仪上会合,经检偏器 P2 后发生干 涉,光电探测器 D2 接收干涉信号,形成测量信号 Sm 。 此时如果测量镜以速度v 移动,则1f 的返回光频率发生变化,成为1D f f +?,D f ?为多普勒频差,1D f f +?通过线性干涉仪与2f 的返回光会合,经检偏后,其拍频被光电 探测器 D2 接收,Sr ,Sm 经前置放大后进入计算机进行计数。 计算机对两路信号进行比较,计算其差值±D f ?。进而按下式计算动镜的速度?和移动的距离得出所测的长度 L 。 设在测量中动镜的移动速度v (这里v 可以随时间变化),则由多普勒效应引起的频差变化为: 122 D v v f f c λ?== (1-1) 式中:1f 激光频率,c 光速,λ波长,D f ?为动镜移动时,由它反射回来的光频率 的
变化量,也就是经计算机比较计算出来的两路信号的差值。 设动镜的移动距离为D ,时间为t 则: 000()222 t t t D D D vdt f dt f dt N λλλε==??=??=+??? (1-2) N ε+为测量过程中动镜下的条纹数(N 为整数部分,ε为小数部分)。 00()t t D D N f dt f dt ε+=??=??∑? (1-3) 所以,位移D 的计算公式为: ()2D N λε= + (1-4) 2. 测角原理如图2所示: 如图,基于正弦尺的原理,利用角度干涉仪和角度靶镜,双频激光干涉仪就可以进行角度测量。其干涉光路的工作原理和测长的相似,只不过测量的位移变成了两个角锥棱镜的相对位置变化—D 。于是,在小角度的情况下,我们得到角度测量结果(弧度)为: D L α= (1-5) 三、 实验步骤 1. 在实验箱中找出需要用的零部件(不用的不要拿出): (1) P T-1105C 激光头、(2)PT-1303C 高速接收器、(3)PT-1201A 线性干涉仪、(4) PT-1202A 全反射组件、(5)PT-1210A 角度干涉组件、(6)角度靶镜、(7) PT-1801B 通用调节架、(8)连接电缆 各部件外形图如下所示:
厨 f静堂鸯溅斌技术)2007亭第弘誊第{O麓 激光干涉仪使用技巧 Precise G口洫to Vsine a Laser Interferometer 魏纯 (广州市计最检测技术研究院,广东广州510030) 瓣萎:本文讨论了激光予涉仪在使用巾的准直等技礴,用户在实际使用中增加葺芒件以及维护巾邋蓟的同舔。燕键词:激光平涉仪;准直 l引言高性能激光干涉仪具有快速、高准确测量的优点,是校准数字机床、坐标测量机及其它定位装置精度及线性指标最常用的标准仪器,弦者所在单位使用的是英国RENISHAW公闭生产的MLl0激光干涉仪,具有性能稳定,使罱方便等特点。 通过较长时闯使用,作者认为测量人员除了要考虑环境、温度、原理等影响测量的常规因素外,掌握一些激光干涉仪的使用技巧会使测量互作事半功倍。 2原理介绍
MLl0激光干涉仪是根据光学千涉基本原理设计磊成酌。从MLl0激光器射出的激光束有单一频率,其标称波长隽0.633pLIn,且其长期波长稳定健(真空状态)要高于0.1ppm。当此光束抵达偏振分光镜时,会被分为两道光束一一道反射光糯一道透射光。这两道光射向其反光镜,然后透过分光镜反射圈去,在激光头内的探测器形成一道干涉光束。若光程差没有任俺变讫,探测器会在樵长性秘楣潢性于涉的两极找到稳定的信号。若光程差确实有变化,探测器会在 每一次光程改变时,在相长性和相消性干涉的弼极找 到变动的信号。这些变化(援格)会被计算并用来测量两个光程闻的差异变化。测量的光程就是栅格数乘以光束大约一半的波长。 值褥注意的是,激光束的波长取决于所通过敖空气折射率。由于空气折射率会随着温度、压力和相对湿度而变化,用来计算测蹩值的波长值可能需要加以李}偿,以配合这魍环境参数豹改变。实际上就测量准确度而言,此类补偿在进行线性位移(定位精度)测量,特别是量程较大时,非常重要。3激光干涉仪使用技巧 3.1 Z轴激光光路快速准直方法 用激光干涉仪进行线性测量时,无论是数字机 床、还是坐标测燮枫,z轴测量酵激光光路的礁童榻对X、Y轴准直来说,要困难的多。尤其是在z轴距离较长的情况下,要保证激光光束经反射镜反射后回到激 先探测器的强度满足测量对对光强的要求,准妻激光光路往往需要很长时间。 根据作者长期使用的经验,按照“离处动尾部,低处动整体”的调整方法,将会大大缩短漆直时闻。(“尾部”是指MLl0激光器电源接口边上的倾斜度调蹩旋钮和三兔架云台上的旋转微调控制旋锂,“整体”是指三
激光干涉仪软硬件介绍 本次试验我们使用的仪器为:Renishaw 激光器测量系统。 这个系统由“软件”与“硬件”两个部分组成,所以我们认识他,就是搞清楚各是什么硬件和软件。 看到这个章节时,可定有人会问还有什么硬软件之分的吗?答案是肯定的! 先问大家一个问题:只有躯体的人就是一个正常的人吗?答案是否定的! 一个正常的人不但须要一个实实在在的躯体,还需要由看不见的意识性的东西——思想的存在! 3.1 激光干涉仪是由什么硬件组成 3.1.1 什么是硬件? 硬件:硬件就是我们看到的一堆由金属、塑料等材料堆成的被称之为“Renishaw 激光干涉仪”的东西(事实上,它是由一些机壳和电路板等物构成)。因为是一些看得见、摸得着的东西,又因为都是“硬”的,所以被人们形象地称为“硬件”。 3.1.2具体硬件名称以及各自的用途是什么? 一、本次使用激光检测仪主要检测螺距误差,因此我们主要使用到以下的仪器: (1)ML10 激光器 Renishaw ML10 Gold Standard 激光器
以上四个图案为激光罩在不同的状态下的作用 A)无光束射出 B)缩小横截面光束及目标 C)最答光束及目标 D)标准测量位置射出最大光来的横截面以及反射光束的探测器孔Renishaw ML10 Gold Standard 激光器:
ML10 是一种单频 HeNe 激光器,内含对输出激光束稳频的电子线路及对由测量光学镜产生的干涉条纹进行细分和计数处理。 其主要作用简单概括为:发射红外线以及返收红外线供特定的软件做分析,记录相关的数据。 (2)三脚架
三脚架及云台可用来安装 ML10 激光器,将 ML10 激光器设置在不同的高度,并充分控制 ML10 激光束的准直。对于大多数机床校准设置,建议将 ML10 激光器安装在三脚架和云台上。 三脚架、安装云台和 ML10 激光器三合一体,可为 ML10 光束准直提供下列调整:高度调整 水平平移调整 角度偏转偏转调整 角度俯仰调整 其中高度调整是由图9上显示的高度曲柄控制的,水平平移是由图2上显示的平移控制旋钮控制,角度偏转偏移是由图2上显示的旋转微调旋钮控制。图2后的两个示意图为水平平移和角度偏移的使用方法。 (3)EC10 环境补偿装置
激光干涉仪分类及应用 激光干涉仪以激光波长为已知长度,利用迈克耳逊干涉系统测量位移的通用长度测量。激光干涉仪有单频的和双频的两种。 激光干涉仪的分类: 单频激光干涉仪 从激光器发出的光束,经扩束准直后由分光镜分为两路,并分别从固定反射镜和可动反射镜反射回来会合在分光镜上而产生干涉条纹。当可动反射镜移动时,干涉条纹的光强变化由接受器中的光电转换元件和电子线路等转换为电脉冲信号,经整形、放大后输入可逆计数器计算出总脉冲数,再由电子计算机按计算式[356-11]式中λ为激光波长(N为电脉冲总数),算出可动反射镜的位移量L。使用单频激光干涉仪时,要求周围大气处于稳定状态,各种空气湍流都会引起直流电平变化而影响测量结果。 双频激光干涉仪 在氦氖激光器上,加上一个约0.03特斯拉的轴向磁场。由于塞曼分裂效应和频率牵引效应,激光器产生1和2两个不同频率的左旋和右旋圆偏振光。经1/4波片后成为两个互相垂直的线偏振光,再经分光镜分为两路。一路经偏振片1后成为含有频率为f1-f2的参考光束。另一路经偏振分光镜后又分为两路:一路成为仅含有f1的光束,另一路成为仅含有f2的光束。当可动反射镜移动时,含有f2的光束经可动反射镜反射后成为含有f2±Δf的光束,Δf是可动反射镜移动时因多普勒效应产生的附加频率,正负号表示移动方向(多普勒效应是奥地利人C.J.多普勒提出的,即波的频率在波源或接受器运动时会产生变化)。这路光束和由固定反射镜反射回来仅含有f1的光的光束经偏振片2后会合成为f1-(f2±Δf)的测量光束。测量光束和上述参考光束经各自的光电转换元件、放大器、整形器后进入减法器相减,输出成为仅含有±Δf的电脉冲信号。经可逆计数器计数后,由电子计算机进行当量换算(乘1/2激光波长)后即可得出可动反射镜的位移量。双频激光干涉仪是应用频率变化来测量位移的,这种位移信息载于f1和f2的频差上,对由光强变化引起的直流电平变化不敏感,所以抗干扰能力强。它常用于检定测长机、三坐标测量机、光刻机和加工中心等的坐标精度,也可用作测长机、高精度三坐标测量机等的测量系统。利用相应附件,还可进行高精度直
科技动态 ——地壳运动与地震 2008年12月第4期(总第90期) 目次 激光干涉技术的发展历史、现状与应用前景 (1) 全球性地震监测的过去、现在和未来 (7) 利用ALOS/PALSAR数据资料采用INSAR方法测定地震造成的地壳形变 (8) PIXEL:日本INSAR地壳形变研究社团 (8) 利用多天线GPS形变监测系统进行滑坡监测 (9) ENVISAT卫星SCANSAR干涉测量法测到的西藏大范围形变 (9) 利用远、近场地震资料确定深源地震的破裂速度 (10) 中国首度举办世界地震工程大会回良玉出席大会开幕式并致辞 (10) 国际空间站安装地震预报实验装置 (11) 科学家探测到震前细微地质变化——有望预警地震 (12) 国家测绘局、中国地震局联合召开新闻发布会公布汶川地震地形变化监测结果 (13) 14 4米―通天石柱‖立珞珈山建地壳运动监测网 ····································································· 中、外文期刊专题文献题录 (14) 应变集中带与大地震的关系 (25) i
地壳活动综合观测系统的研发和取得的成果以及今后的连续观测 (26) 湖北省地震局抗震救灾英雄模范卓力格图抵京接受表彰 (30) 湖北省地震局赴四川地震灾区现场工作队被授予“湖北青年五四奖状” (30) 《湖北省地震应急预案(修订稿)》通过评审 (30) 郭生练出席湖北省地震应急快速反应系统项目建设总结表彰会 (31) 西班牙兰萨若特自治州主席率代表团访问湖北 (31) 湖北省地震重点监视防御区工作会议在武汉召开 (32) 武汉地震工程院参建湖北援川项目 (32) 郭唐永研究员赴韩国庆州参加中韩SLR研讨会并进行合作交流 (32) 王佩莲被省科协授予―湖北省科技传播十大杰出人物‖称号 (33) 《科技动态》2008年总目录 (34) 主编:郭唐永副主编:贾冬青责任编辑:饶扬誉贾冬青 i i
简介 以激光波长为已知长度、利用迈克耳逊干涉系统(见激光测长技术)测量位移的通用长度测量工具。激光干涉仪有单频的和双频的两种。单频的是在20世纪60年代中期出现的,最初用于检定基准线纹尺,后又用于在计量室中精密测长。双频激光干涉仪是1970年出现的,它适宜在车间中使用。激光干涉仪在极接近标准状态(温度为20℃、大气压力为101325帕、相对湿度59%、C O2含量0.03%)下的测量精确度很高,可达1×10?7。 工作原理 一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。另一个角锥反射镜相对于分光镜移动,形成变化长度测量光束。 从激光头射出的激光光束(1)具有单一频率,标称波长为0.633μm,长期波长稳定性(真空中)优于0.05ppm。当此光束到达偏振分光镜时,被分成两束光—反射光束(2)和透射光束(3)。这两束光被传送到各自的角锥反射镜中,然后反射回分光镜中,在嵌于激光头中的探测器中形成干涉光束。 如果两光程差不变化,探测器将在相长干涉和相消干涉的两端之间的某个位置观察到一个稳定的信号。如果两光程差发生变化,每次光路变化时探测器都能观察到相长干涉和相消干涉两端之间的信号变化。这些变化(条纹)被数出来,用于计算两光程差的变化。测量的长度等于条纹数乘以激光波长的一半。 应当注意到,激光波长将取决于光束经过的空气的折射率。由于空气折射率会随着气温、压力和相对湿度的变化而变化,用于计算测量值的波长值可能需要对这些环境参数的变化进行补偿。在实践中,对于技术指标中的测量精度,只有线性位移(定位精度)测量需要进行此类补偿,在这种情况下两束光的光程差变化可能非常大。
产品用途 1.激光干涉仪是检定数控机床、坐标测量机位置精度的理想工具。检定时可按照规定标准处理测量数据并打印出误差曲线,为机床的修正提供可靠依据。 2.激光干涉仪配有各种附件,可测量小角度、平面度、直线度、平行度、垂直度等形位误差,在现场使用尤为方便。 2.1.线性测量 要对线性测量进行设定,使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上。这个组合装置称为“线性干涉镜”,它形成激光光束的参考光路。线性干涉镜放置在激光头和线性反射镜之间的光路上,如下图所示。
激光干涉仪概述 SJ6000激光干涉仪产品采用美国进口高稳频氦氖激光器、激光双纵模热稳频技术、高精度环境补偿模块、几何参量干涉光路设计、高精度激光干涉信号处理系统、高性能计算机控制系统技术,实现各种参数的高精度测量。通过激光热稳频控制技术,实现快速(5~10分钟)、高精度(0.05ppm)、抗干扰能力强、长期稳定性好的激光频率输出,采用不同的光学镜组可以测量出线性、角度、直线度、平面度和垂直度等几何量,并且可以进行动态分析。
SJ6000激光干涉仪产品具有测量精度高、测量速度快、最高测速下分辨率高、测量范围大等优点。通过与不同的光学组件结合,可以实现对直线度、垂直度、角度、平面度、平行度等多种几何精度的测量。在相关软件的配合下,还可以对数控机床进行动态性能检测,可以进行机床振动测试与分析,滚珠丝杆的动态特性分析,驱动系统的响应特性分析,导轨的动态特性分析等,具有极高的精度和效率,
为机床误差修正提供依据。 激光干涉仪性能特点 1.测量精度高、速度快,稳定性好 ①使用美国高性能氦氖激光器,结合伺服稳频控制系统,达到高精度稳频(0.05ppm) ②以光波长(633nm)为测量单位,分辨率可达nm级 ③使用高速光电信号采样和处理技术,测量速度可达到4m/s。 ④配合有环境补偿单元,在环境变化的情况下,也可以得到较高的测量精度 ⑤分离式干涉镜设计,避免了测量镜组由于主机发热而引起的镜组形变 2.应用范围广 ①可以实现线性、角度、直线度、垂直度、平面度等几何量的检测 ②结合我们的软件系统,可以用于速度,加速度,振动分析以及稳定度等分析 ③可实时监控精密加工机床等机器的动态数据,进行动态特性分析 3.软件界面友好 ①使用当前热门的软件界面开发工具,软件界面人性化,操作简单。 ②将静态测量和动态测量两种功能合并到一个软件中,更方便用户切换测量类型。
激光干涉仪 - 单频与双频激光干涉仪比较 单频的激光器它的一个根本弱点就是受环境影响严重,在测试环境恶劣,测量距离较长时,这一缺点十分突出。其原因在于它是一种直流测量系统,必然具有直流光平和电平零漂的弊端。激光干涉仪可动反光镜移动时,光电接收器会输出信号,如果信号超过了计数器的触发电平则就会被记录下来,而如果激光束强度发生变化,就有可能使光电信号低于计数器的触发电平而使计数器停止计数,使激光器强度或干涉信号强度变化的主要原因是空气湍流,机床油雾,切削屑对光束的影响,结果光束发生偏移或波面扭曲。这种无规则的变化较难通过触发电平的自动调整来补偿,因而限制了单频干涉仪的应用范围,只有设法用交流测量系统代替直流测量系统才能从根本上克服单频激光干涉仪的这一弱点。 而双频激光干涉仪正好克服了这一弱点,它是在单频激光干涉仪的基础上发展的一种外差式干涉仪。和单频激光干涉仪一样,双频激光干涉仪也是一种以波长作为标准对被测长度进行度量的仪器,所不同者,一方面是当可动棱镜不动时,前者的干涉信号是介于最亮和最暗之间的某个直流光平,而后者的干涉信号是一个频率约为1.5MHz的交流信号;另一方面,当可动棱镜移动时,前者的干涉信号是在最亮和最暗之间缓慢变化的信号,而后者的干涉信号是使原有的交流信号频率增加或减少了△f,结果依然是一个交流信号。因而对于双频激光干涉仪来说,可用放大倍数较大的交流放大器对干涉信号进行放大,这样,即使光强衰减90%,依然可以得到合适的电信号。由于这一特点,双频激光干涉仪可以在恒温,恒湿,防震的计量室内检定量块,量杆,刻尺和坐标测量机等,也可以在普通车间内为大型机床的刻度进行标定,既可以对几十米的大量程进行精密测量,也可以对手表零件等微小运动进行精密测量,既可以对几何量如长度、角度.直线度、平行度、平面度、垂直度等进行测量,也可以用于特殊场合,诸如半导体光刻技术的微定位和计算机存储器上记录槽间距的测量等等。总之,双频激光干涉仪的优越性主要有以下几点: 1. 精度高双频激光干涉仪以波长作为标准对被测长度进行度量的仪器。即使不做细分也可达到μm 量级,细分后更可达到n m量级。(安捷伦5530激光干涉仪线性精度能达到0.4PPM) 2. 应用范围广双频激光干涉仪除了可用于长度的精密测量外,测量角度、直线度、平面度、振动距离及速度等等,还可以分光进行多路测量。 3. 环境适应力强即使光强衰减90%,仍然可以得到有效的干涉信号。由于这一特点,双频激光干涉仪既可在恒温、恒湿、防震的计量室内检定量块、量杆、刻尺、微分校准器和坐标测量机,也可以在普通的车间内为大型的机床的刻度进行标定。
激光全息技术及其发展 所谓全息照片就是一种记录被摄物体反射(或透射)光波中全部信息的先进照相技术。全息照片不用一般的照相机,而要用一台激光器。激光束用分光镜一分为二,其中一束照到被拍摄的景物上,称为物光束;另一束直接照到感光胶片即全息干板上,称为参考光束。当光束被物体反射后,其反射光束也照射在胶片上,就完成了全息照相的摄制过程。全息照片和普通照片截然不同。用肉眼去看,全息照片上只有些乱七八糟的条纹。 可是若用一束激光去照射该照片,眼前就会出现逼真的立体景物。更奇妙的是,从不同的角度去观察,就可以看到原来物体的不同侧面。而且,如果不小心把全息照片弄碎了,那也没有关系。随意拿起其中的一小块碎片,用同样的方法观察,原来的被摄物体仍然能完整无缺地显示出来。全息照相的原理是利用光的干涉原理,利用两束光的干涉来记录被摄物体的信息。 1948年,英国人丹尼斯·加拍正在研究光的干涉现象,以提高电子显微镜的分辨率。光的干涉在日常生活中常能见到:吹几个肥皂泡,给阳光一照,能呈显艳丽的色彩;在一张纸屏上戳两个小孔,让光透射到墙上,便可看到明暗相间的条纹。原来,光是一种波,包含有振幅与位相两个物理要素。当两束相干光迭加时,在位相相同的地方波幅相加,出现亮纹,位相相反的地方就为暗纹。加拍从这些若明若暗的干涉图中,得到了启发。既然光的干涉现象是光波位相不同所造成的,那么,换句话说,在光的干涉图中,就记录有光的位相信息。而这不正是照相技术渴望以求的吗? 原来,普通照片是根据景物所反射的光波亮度强弱感光而成的,它只能记录光的振幅信息,拍摄的景物是平面图像,没有立体真实感。只有当光的位相信息也能被同时记下来,并重新表现出来时,照片才能给人以远近深浅的立体感。加柏在光干涉的现象中,找到了解决普通照相缺陷的途径,提出了全息照相的理论。激光解决难题,加拍的方法看来似乎极为简单,但要完全解决拍摄全息照相的难题并非轻而易举,因为当时缺乏理想的单色相干光源。60年代激光的问世,才为全息术提供了理想的相干光源。1963年,在美国密执安大学从事雷达工作的利思和乌巴特尼克斯两个人首先做出了第一张成功的全息照相。 激光全息照相用不着普通照相机所用的透镜,只要把激光分为两束,一束照明物体,使其反射成物波;一束作为参考光直接射向底片。由于从景物上反射的物波,到达底片所经历的光程各不相同,因而位相千差万别,与参考光相干涉的结果,便在底片上同时记下了全部信息。 全息照相的底片上面尽是干涉花纹。只有用与记录时相同的参考光照明全息底片时,才能将原始物波重现出来。而且,在我们眼睛中,这个立体的再现现象与真实的物体简直无法区分了。 激光全息摄影很快得到了广泛应用。前面讲到的那家珠宝店,就是把最吸引人的珠宝拍摄在一帧围成圆筒形状的全息照相底片上,再套置在一盏清晰明亮的白炽照明灯上,放进橱窗,就此以假乱真。同样地,对于收藏珍贵的历史文物、稀有动物标本、各种精制器件、复杂的分子结构模型、医学或生物学的图像等都可以制作成全息照片加以展示。全息术的重要作用
第一章、前言 一、本次我们主要研究:如何检测机床的螺距误差。因此我们主要的任务在于: 1. 应该使用什么仪器进行测量 2. 怎么使用测量仪器 3. 怎么进行数据分析 4. 怎么将测量所得的数据输入对应的数控系统 二、根据第一点的要求,我们选择的仪器为:Renishaw 激光器测量系统,此仪器检测的范围包括: 1. 线性测量 2. 角度测量 3. 平面度测量 4. 直线度测量 5. 垂直度测量 6. 平行度测量 线性测量:是激光器最常见的一种测量。激光器系统会比较轴位置数显上的读数位置与激光器系统测量的实际位置,以测量线性定位精度及重复性。 三、根据第二点的解释,线性测量正符合我们检测螺距误差的要求。因此,我们此次使用的检测方法——线性测量。 总结以上我们的核心在于:如何操作Renishaw 激光器测量系统结合线性测量的方法进行检测,之后将检测得到的数据进行分析,最后将分析得到的数据存放到数控系统中。这样做的目的在于——提高机床的精度。 - 1 - 第二章、 2.1 什么是螺距误差? 基础知识 开环和半闭环数控机床的定位精度主要取决于高精度的滚珠丝杠。但丝杠总有一定螺距误差,因此在加工过程中会造成零件的外形轮廓偏差。
由上面的原因可以得知: 螺距误差是指由螺距累积误差引起的常值系统性定位误差。 2.2 为什么要检测螺距误差? 根据2.1节,检测螺距误差是为了减少加工过程中造成零件的外形轮廓偏差,即提高机床的精度。 2.3 怎么检测螺距误差? (1)安装高精度位移检测装置。 (2)编制简单的程序,在整个行程中顺序定位于一些位置点上。所选点的数目及距离则受数控系统的限制。 (3)记录运动到这些点的实际精确位置。 (4)将各点处的误差标出,形成不同指令位置处的误差表。(5)多次测量,取平均值。 (6)将该表输入数控系统,数控系统将按此表进行补偿。 2.4 什么是增量型误差、绝对型误差? ①增量型误差 增量型误差是指:以被补偿轴上相邻两个补偿点间的误差差值为依据来进行补偿②绝对型误差 绝对型是误差是指:以被补偿轴上各个补偿点的绝对误差值为依据来进行补偿2.5 螺距误差补偿的原理是什么? 螺距误差补偿的基本原理就是将数控机床某轴上的指令位置与高精度位置测量系统所测得的实际位置相比较,计算出在数控加工全行程上的误差分布曲线,再将
激光干涉仪在检测数控机床精度方面的应用 1.前言 随着大型数控机床应用的日见广泛,对大型机械两条导轨间平垂直度检测要求也越来越多。传统的垂直度检测方法如大理石角尺配合干分表方法受标准角尺大小的限制只能应用于小型机器:另外采用四象限等传感器方法,则因传感器的精度漂移和读数稳定性容易受到环境变化的影响,使得其应用范围大大受限。 激光干涉仪是通过激光波长溯源的原理来实现数控机床几何精度及定位精度检测,激光干涉仪主要可以对数控机床进行线性、角度、直线度、垂直度、转轴测量等,下面就来一一讲解。 2.测量应用 2.1.线性测量 2.1.1.线性测量构建 要进行线性测量,需使用随附的两个外加螺丝将其中的一个线性反射镜安装在分光镜上,组装成“线性干涉镜”。线性干涉镜放置在激光头和线性反射镜之间的光路上,用它的反射光线形成激光光束的参考光路,另一束光入射到线性反射镜,通过线性反射镜的线性位移来实现线性测量。如下图所示。 线性测量构建图
水平轴线性测量样图垂直轴线性测量样图 2.1.2.线性测量的应用 激光干涉仪可用于精密机床定位精度、重复定位精度、微量位移精度的测量。测量时在工作部件运动过程中自动采集并及时处理数据。 激光干涉仪应用于机密机床校准 2.2角度测量 2.2.1.角度测量构建 与线性测量原理一样,角度测量需要角度干涉镜和角度反射镜,测试时角度反射镜 和角度干涉镜必须有一个相对旋转,相对旋转后两束光的光程差就会发生变化,而光程 差的变化会被激光干涉仪探测器探测出来,由软件将线性位置的变化转换为角度的变化 显示出来。
角度测量原理及测量构建 水平轴俯仰角度测量样图水平轴偏摆角度测量样图 2.2.2.角度测量的应用 机床准直平台/倾斜工作台的测量 由于角度镜组的不同安装方式,其测量结果代表不同方向的角度值。您可以结合实际需要进行安装、测量。