Linux程序设计实验报告1
——操作系统基本命令使用
一、实验目的
1.通过对Emacs、vi、vim、gedit文本编辑器的使用,掌握在Linux环境下文本文件的编辑方法;
2.通过对常用命令mkdir、cp、cd、ls、mv、chmod、rm等文件命令的操作,掌握Linux操作系统中文件命令的用法。
二、实验任务与要求
1.emacs的使用,要求能新建、编辑、保存一个文本文件
2.vi或vim的使用,要求能新建、编辑、保存一个文本文件
3.gedit的使用,要求能新建、编辑、保存一个文本文件
4.掌握mkdir、cd命令的操作,要求能建立目录、进入与退出目录
5.掌握cp、ls、mv、chmod、rm命令的操作,要求能拷贝文件、新建文件、查看文件、文件重命名、删除文件等操作。
三、实验工具与准备
计算机PC机,Linux Redhat Fedora Core6操作系统
四、实验步骤与操作指导
任务1.学习emacs的使用,要求能新建、编辑、保存一个文本文件
(1)启动emacs
(2)输入以下C程序
(3)保存文件为kk.c
(4)用emacs打开文件kk.c
(5)修改程序
(6)另存为文件aa.txt并退出。
任务2.vi或vim的使用,要求能新建、编辑、保存一个文本文件
(1)点击”应用程序”→ “附件”→“终端”,打开终端,在终端输入命令:
[root@localhost root]#vi kk.c
按i键,进入插入状态。
(2)输入以下C程序
#include
int main( )
{
printf(“Hello world!\n”);
return 0;
}
此时可以用Backspace、→、←、↑、↓键编辑文本。
(3)保存文件为kk.c
按Esc键,进入最后行状态,在最后行状态输入:wq保存文件,退出vi。
(4)用vi打开文件kk.c,输入命令:
[root@localhost root]#vi kk.c
(5)修改程序为:
#include
int main( )
{
printf(" Hello world!\n");
printf("*****************\n");
return 0;
}
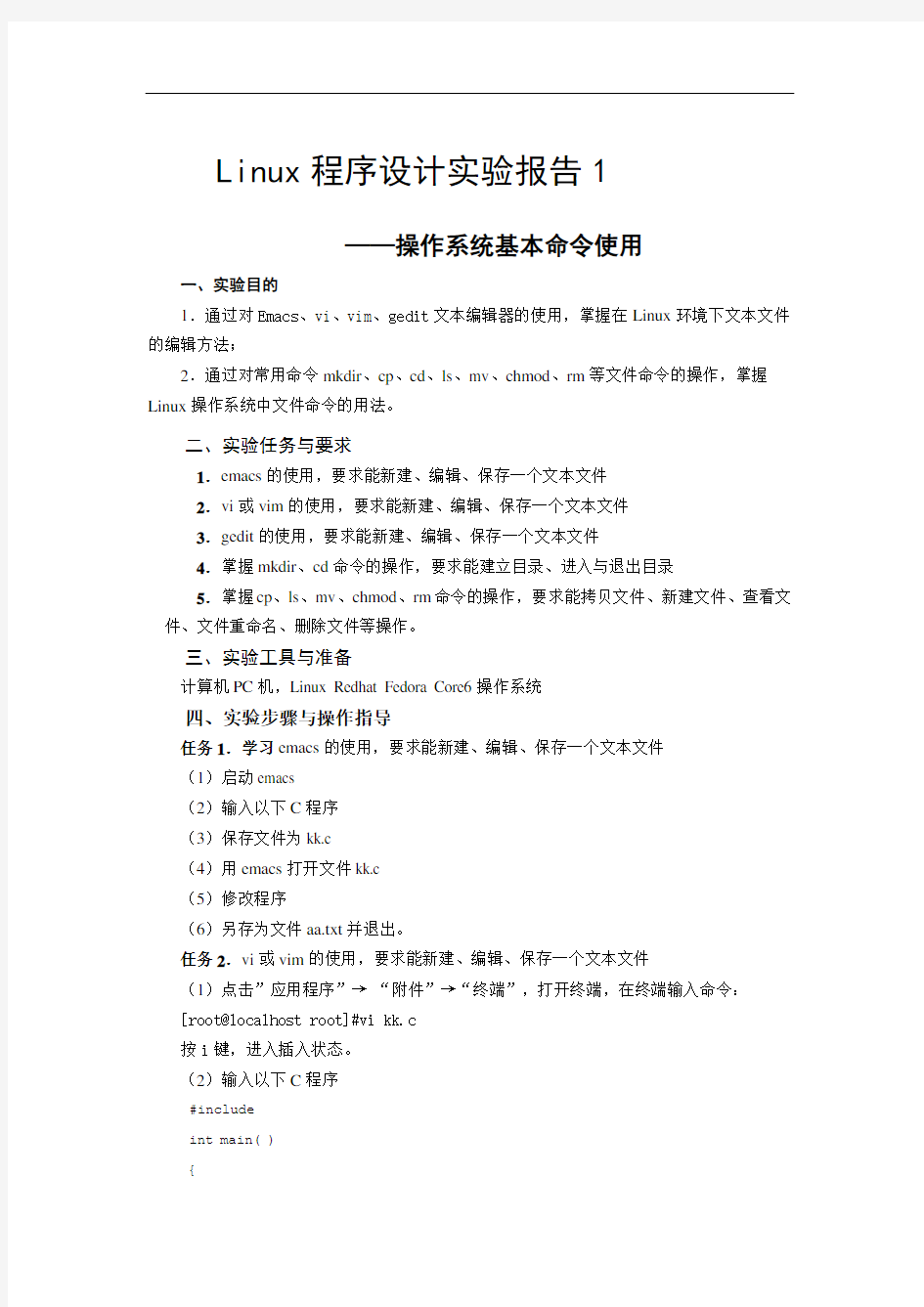
(6)按Esc键,进入最后行状态,在最后行状态输入:wq aa.txt保存文件,如图1所示,另存为文件aa.txt并退出vi。。
图1 程序编辑环境
任务3.gedit的使用,要求能新建、编辑、保存一个文本文件
(1)启动gedit,点击”应用程序”→ “附件”→“文本编辑器”,打开文本编辑器,如图所示。
(2)输入以下C程序
(3)保存文件为kk.c
(4)用gedit打开文件kk.c
(5)修改程序
(6)另存为文件aa.txt并退出。
任务4.掌握mkdir、cd命令的操作,要求能建立目录、进入与退出目录
(1)打开终端”应用程序”→ “附件”→“终端”,在终端用命令新建目录kkk [root@localhost root]#mkdir kkk
(2)进入目录kkk,并在kkk目录下新建目录kkka,进入kkka目录
[root@localhost root]#cd kkk
[root@localhost kkk]#mkdir kkka
[root@localhost kkk]#cd kkka
[root@localhost kkka]#
(3)执行命令cd .. 命令,然后再进入kkka目录,输入命令cd 、cd /etc,观察其结果。
[root@localhost kkka]#cd ..
[root@localhost kkk]#cd kkka
[root@localhost kkka]#cd
[root@localhost root]#cd /etc
[root@localhost etc]#
任务5.掌握cp、ls、mv、chmod、rm命令的基本操作,要求能拷贝文件、新建文件、查看文件的权限、修改文件以及删除文件。
(1)在kkka目录下建立文件kk.c
[root@localhost root]#cd /root/kkk/kkka
[root@localhost kkka]#vi kk.c
(2)查看文件kk.c的属性
[root@localhost kkka]#ls kk.c -l
编辑kk.c文本,并用:wq存盘。
(3)把kk.c更名为aa.c
[root@localhost kkka]#mv kk.c aa.c
(4)把文件夹/root/kkk/kkka下的文件aa.c拷贝到/root/kkk目录下,文件取名为kk.c
[root@localhost kkka]#cp aa.c /root/kkk/kk.c
(5)修改文件kk.c的权限,使得文件所有者为可读、可写、可执行,对组内人及其他人可读、不可写、不可执行。
[root@localhost kkka]#cd ..
[root@localhost kkk]#chmod u=rwx,go=r kk.c
此时可用命令ls查看
[root@localhost kkk]#ls -l
(6)删除文件与文件夹
删除kkka文件夹下的文件aa.c
[root@localhost kkk]#rm kkka/aa.c
查看文件夹kkka下否删除了文件aa.c
[root@localhost kkk]ls kkka/aa.c -l
删除kkka文件夹下
[root@localhost kkk]#rmdir kkka
查看是否删除了文件夹
[root@localhost kkk]ls kkka -l
(7)新建一个linux_d目录,并设置它的权限为666。
(8)在指定的目录中搜索文件,利用find命令搜索含有通配符的文件*.c。
(9)练习命令:ping\netstat\mount\ifconfig\
(10)在根目录下用find查找.c文件。
(11)练习检查磁盘命令fdisk的使用。列出结果中有关/dev/sd的磁盘信息。
/sbin/fdisk -l |grep /dev/sd
(12)设置当前的时间为2013年10月01日10点23分。
(13)在后台运行命令gedit,并用命令kill杀死gedit的进程。
(14)检查磁盘,列出目录/dev/sd的磁盘信息。
(15)查找/usr/sbin及/usr/bin/两个目录中所有的C语言程序。
(16)统计当前目录下txt文件的总字节数。
(17)把ps命令的标准输出结果输入给sort,经过排序后结果被保存到pssort.out中。
五、实验结果记录
任务2.vi或vim的使用
1、输入vi kk.c创建kk.c文件并用vi编辑,在最后行输入wq保存退出
2、输入vi kk.c打开该文件,修改文件,在最后行输入wq! aa.txt另存为aa.txt文件并退出
任务3.gedit的使用
1、输入gedit命令打开gedit编辑器,输入以下文字,保存为kk.c
2、在保存目录下输入gedit kk.c打开,使用ctrl+h替换,另存为aa.txt
任务4.掌握mkdir、cd命令的操作
1、输入mkdir kkk新建目录kkk
cd kkk进入kkk文件夹
mkdir kkka新建目录kkka
cd kkka进入kkka文件夹,结果如图
2、输入cd ..返回上级目录,cd kkka再进入kkka文件夹
输入cd进入用户主目录,即root文件夹,可使用pwd命令查看当前路径
输入cd/etc进入etc文件夹
任务5.掌握cp、ls、mv、chmod、rm命令的基本操作
1、输入cd /home/brs/work/kkk/kkka 即绝对路径,可直接进入指定文件夹,vi kk.c建立
文件
编辑保存后,输入ls kk.c –l查看指定文件详细属性
输入mv kk.c aa.c将文件kk.c重命名为aa.c(此时mv命令源文件和目标文件在同一文件夹下,故起到重命名作用)
输入cp aa.c /home/brs/work/kkk/kk.c将aa.c文件拷贝到kkk下并命名为aa.c
输入chmod u=rwx,go=r kk.c修改文件权限,所有者读写运行,组内可读,查看
输入rm kkka/aa.c删除kkka文件夹下aa.c文件,使用ls命令查看是否删除
输入rmdir kkka删除kkka文件夹,再次查看是否删除
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
三墩职业技术学院实验报告 课程名称:电子电路设计实验 指导老师: 成绩:__________________ 实验名称: 一阶RC 电路的瞬态响应过程实验研究 实验类型:探究类同组学生姓名:__ 一、实验目的 二、实验任务与要求 三、实验方案设计与实验参数计算(3.1 总体设计、3.2 各功能电路设计与计算、3.3完整的实验电路……) 四、主要仪器设备 五、实验步骤与过程 六、实验调试、实验数据记录 七、实验结果和分析处理 八、讨论、心得 一、实验目的 1、熟悉一阶RC 电路的零状态响应、零输入响应过程。 2、研究一阶RC 电路在零输入、阶跃激励情况下,响应的基本规律和特点。 3、学习用示波器观察分析RC 电路的响应。 4、从响应曲线中求RC 电路的时间常数。 二、实验理论基础 1、一阶RC 电路的零输入响应(放电过程) 零输入响应: 电路在无激励情况下,由储能元件的初始状态引起的响应,即电路初始状态不为零,输入为零所引起的电路响应。 (实际上是电容器C 的初始电压经电阻R 放电过程。) 在图1中,先让开关K 合于位置a ,使电容C 的初始电压值0)0(U u c =-,再将开关K 转到位置b 。 电容器开始放电,放电方程是 图1 ) 0(0≥=+t dt du RC u C C
可以得出电容器上的电压和电流随时间变化的规律: 式中τ=RC 为时间常数,其物理意义 是衰减到1/e (36.8%))0(u c 所需要的时间,反映了电路过渡过程的快慢程度。τ图2 图2 2电路的零状态响应(充电过程) 所谓零状态响应是指初始状态为零,而输入不为零所产生的电路响应。RC 关K 可以得出电压和电流随时间变化的规律: 式中τ=RC 为时间常数,其物理意义是由初始值上升至稳态值与初始值差值的63.2%处所需要的时间。同样可以从响应曲线中求出τ,如图3。 ) 0()0()(0≥-=-=- - - t e R U R e u t i t RC t C C τ ) (u t C ) 0()0()(0≥==- --t e U e u t u t RC t C C τ ()(0) t t S S RC C U U i t e e t R R τ--==≥()11(0) t t RC C S S u t U e U e t τ --????=-=-≥ ? ? ????
《自动控制原理》 实验报告 姓名: 学号: 专业: 班级: 时段: 成绩: 工学院自动化系
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、实验原理 1.比例环节的传递函数为 K R K R R R Z Z s G 200,1002)(211 212==-=-=- = 其对应的模拟电路及SIMULINK 图形如图1-3所示。 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G ; ② 惯性环节11)(1+= s s G 和1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节s s G =)(1 ⑤ 比例+微分环节(PD )2)(1+=s s G 和1)(2+=s s G ⑥ 比例+积分环节(PI )s s G 11)(1+=和s s G 211)(2+= 四、实验结果及分析 图1-3 比例环节的模拟电路及SIMULINK 图形
① 仿真模型及波形图1)(1=s G 和2)(1=s G ② 仿真模型及波形图11)(1+= s s G 和1 5.01)(2+=s s G 11)(1+= s s G 1 5.01 )(2+=s s G ③ 积分环节s s G 1)(1= ④ 微分环节
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
自动化控制实验报告(DOC 43页)
本科生实验报告 实验课程自动控制原理 学院名称 专业名称电气工程及其自动化 学生姓名 学生学号2013 指导教师 实验地点6C901 实验成绩 二〇一五年四月——二〇一五年五月
线性系统的时域分析 实验一(3.1.1)典型环节的模拟研究 一. 实验目的 1. 了解和掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式 2. 观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响 二.典型环节的结构图及传递函数 方 框 图 传递函数 比例 (P ) K (S) U (S) U (S)G i O == 积分 (I ) TS 1 (S)U (S)U (S)G i O == 比例积分 (PI ) )TS 1 1(K (S)U (S)U (S)G i O +== 比例微分 (PD ) )TS 1(K (S) U (S) U (S)G i O +== 惯性 TS 1K (S)U (S)U (S)G i O += =
环节 (T) 比例 积分 微分 (PI D) S T K S T K K (S) U (S) U (S) G d p i p p i O + + = = 三.实验内容及步骤 观察和分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响.。 改变被测环节的各项电路参数,画出模拟电路图,阶跃响应曲线,观测结果,填入实验报告 运行LABACT程序,选择自动控制菜单下的线性系统的时域分析下的典型环节的模拟研究中的相应实验项目,就会弹出虚拟示波器的界面,点击开始即可使用本实验机配套的虚拟示波器(B3)单元的CH1测孔测量波形。具体用法参见用户手册中的示波器部分。1).观察比例环节的阶跃响应曲线 典型比例环节模拟电路如图3-1-1所示。 图3-1-1 典型比例环节模拟电路 传递函数: 1 (S) (S) (S) R R K K U U G i O= = = ;单位阶跃响应:
一、实验目的:1、观察压杆的失稳现象; 2、测定两端铰支压杆的临界压力; 3、观察改变支座约束对压杆临界压力的影响。 二、设备及装置: 1. 带有力传感和显示器的简易加载装置或万能电子试验机; 2. 数字应变仪; 3. 大量程百分表及支架; 4. 游标卡尺及卷尺; 5. 试样,压杆试样为由弹簧钢制成的细长杆,截面为矩形,两端加工成带有小 圆弧的刀刃。在试样中点的左右两端各贴仪枚应变片。 6. 支座,支座为浅V 性压杆变形时两端可绕Z 轴转动,故可作为铰支架。 三、实验原理和方法: 1、理论计算:理想压杆,当压力P 小于临界压力cr P 时,压杆的直线平衡是稳定的。这时压力P 与中点挠度δ的关系相当于右图中的直线OA 。当压力到达临界压力cr P 时,压杆的直线平衡变为不稳定,它可能转为曲线平衡。按照小挠度理论,P 与δ的关系相当于图中水平线AB 。两端铰支细长杆的临界压力由欧拉公式计算 2cr 2 P EI l π= ,其中I 为 横截面对z 轴的惯性矩。 2、实测时:实际压杆难免有初弯曲,材料不均匀和压力偏心等缺陷,由于这些缺陷,在P 远小于cr P 时,压杆已经出现弯曲。开始,δ很不明显,且增长缓慢,如图中的OCD 段。随着P 逐步接近cr P ,δ将急剧增大。只有弹性很好的细长杆才可以承受大挠度,压力才可能略微超过cr P ,实测时,在压杆两侧各贴一应变片,测定P-ε曲线,对前后应变ε取增量 ε?,当ε?大于上一个的ε?的2倍时即认为此时的压力为临界压力。 3、加载分两个阶段,在理论值cr P 的70%~80%之前,可采取大等级加载,载荷超过cr P 的80%以后,载荷增量应取得小些。在整个实验过程中,加载要保持均匀、平稳、缓慢。
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
关于印发《浙江大学本科实验报告规范(暂行)》的通知 各学院: 现将《浙江大学本科实验报告规范(暂行)》印发给你们,请遵照执行。 教务处 二OO六年十一月十 六日 浙江大学本科实验报告规范(暂行) 实验报告是学生实验研究结果的文字记录和总结,是培养学生动手能力、写作能力、分析能力等综合能力的重要手段。为进一步提高本科实验教学质量,规范我校本科实验报告的格式、评阅、收集及保管等方面的工作,特制定本规范。 一、实验报告的管理规范 (一)对学生的基本要求 1.按照实验课程教学计划的要求,原则上每个实验项目提 交一份实验报告。 2.按照规定的时间和要求,完成实验报告并交实验教师批改。 3.实验报告第一页用学校统一的实验报告纸书写(可用A4纸下载打印学校统一规定的实验报告格式),附页可用A4纸书写,要求字迹工整,实验数据必须真实、有效,曲线要画在座标纸上,线路图要整齐、清楚(不得徒手画)。电子版的实验报告也要统一
采用学校规定的实验报告格式。 (二)对实验教师的要求 1.实验报告批改要有签名,打分,原则上要求有评语。 2.对学生完成的实验报告数量和质量要作书面记录,每个实验项目的实验报告成绩登记在实验报告成绩登记表(见附件1)中,并按一定比例(独立设课的实验报告一般为10-15%),作为平时成绩的一部分计入实验课总评成绩内。每学期装订成册时附在封面后第一页。 3.对迟交实验报告的学生要酌情扣分,对缺交和抄袭实验报告的学生应及时批评教育,并对该次实验报告的分数以零分处理。对单独设课的实验课程,如学生抄袭或缺交实验报告达该课程全学期实验报告总次数三分之一以上,不得同意其参加本课程的考核。 4.实验教师每学期负责对拟存档的学生实验报告按课程、学生收齐并装订成册(装订顺序由实验教师自行决定)。装订线在左侧,第一页加订实验报告封皮(封皮按学生装订见附件2,按课程装订见附件3)。实验报告可根据课程性质提交电子版,但需要有教师的批改记录,并将电子版汇总后刻录在一张光盘上,加上封面。 (三)对管理部门的要求 1.课程结束后,由各学院负责本科教学管理的科室负责督促收齐各门实验课程的实验报告。 2.由各学院确定具体实验室负责保管相应实验课程的实验报告。 3.教务处负责组织人员对实验报告进行不定期抽
实验报告 课程名称:自动控制原理 实验项目:典型环节的时域相应 实验地点:自动控制实验室 实验日期:2017 年 3 月22 日 指导教师:乔学工 实验一典型环节的时域特性 一、实验目的 1.熟悉并掌握TDN-ACC+设备的使用方法及各典型环节模拟电路的构成方法。
2.熟悉各种典型环节的理想阶跃相应曲线和实际阶跃响应曲线。对比差异,分析原因。 3.了解参数变化对典型环节动态特性的影响。 二、实验设备 PC 机一台,TD-ACC+(或TD-ACS)实验系统一套。 三、实验原理及内容 下面列出各典型环节的方框图、传递函数、模拟电路图、阶跃响应,实验前应熟悉了解。 1.比例环节 (P) (1)方框图 (2)传递函数: K S Ui S Uo =) () ( (3)阶跃响应:) 0()(≥=t K t U O 其中 01/R R K = (4)模拟电路图: (5) 理想与实际阶跃响应对照曲线: ① 取R0 = 200K ;R1 = 100K 。 ② 取R0 = 200K ;R1 = 200K 。
2.积分环节 (I) (1)方框图 (2)传递函数: TS S Ui S Uo 1 )()(= (3)阶跃响应: ) 0(1)(≥= t t T t Uo 其中 C R T 0= (4)模拟电路图 (5) 理想与实际阶跃响应曲线对照: ① 取R0 = 200K ;C = 1uF 。 ② 取R0 = 200K ;C = 2uF 。
1 Uo 0t Ui(t) Uo(t) 理想阶跃响应曲线 0.4s 1 Uo 0t Ui(t) Uo(t) 实测阶跃响应曲线 0.4s 10V 无穷 3.比例积分环节 (PI) (1)方框图: (2)传递函数: (3)阶跃响应: (4)模拟电路图: (5)理想与实际阶跃响应曲线对照: ①取 R0 = R1 = 200K;C = 1uF。 理想阶跃响应曲线实测阶跃响应曲线 ②取 R0=R1=200K;C=2uF。 K 1 + U i(S)+ U o(S) + Uo 10V U o(t) 2 U i(t ) 0 0 .2s t Uo 无穷 U o(t) 2 U i(t ) 0 0 .2s t
摘要:本实验以土壤中的微生物作为原材料,根据微生物各自的生长特点,配制不同成分的微生物培养基。将微生物培养物或含有微生物的样品在无菌条件下移植到培养基上培养,在分离出相应微生物后,对其进行进一步的纯化,然后观察其形态特征,并通过微生物的生理生化反应对其种类进行鉴定,最后研究环境条件对微生物生长的影响。 关键字:培养基,分离,纯化,鉴定,环境条件 一、实验材料 1、分离细菌、真菌、放线菌的材料:牛肉膏、蛋白胨、氯化钠、琼脂、马铃薯、蔗糖;可溶性淀粉、K2HPO4、KNO3、MgSO4·7H2O、FeSO4·7H2O等。新鲜土壤;培养基:灭菌的牛肉膏蛋白胨琼脂培养基、淀粉琼脂培养基、马铃薯蔗糖培养基(10mL装);试剂:5000U/mL链霉素液、0.5%重铅酸钾液。 2、细菌、真菌、放线菌纯化与鉴定的材料:菌种:大肠杆菌、枯草杆菌、荧光假单胞菌、金黄色葡萄球菌,前实验分离的未知菌;培养基:淀粉培养基、硫化氢实验培养基、石蕊牛乳培养基、油脂培养基;试剂:碘液。菌种:枯草杆菌斜面;灵杆菌菌液;黑曲霉斜面。培养基采用:牛肉膏蛋白胨斜面培养基牛肉膏蛋白胨琼脂培养基(10mL)、马铃薯蔗糖培养基(10mL)、淀粉琼脂培养基(10mL);供试药剂: 2.5%碘酒,75%酒精,0.1%HgCl2,5%石炭酸。 二、实验步骤 1、分离细菌、真菌、放线菌的步骤 (一)、培养基配制 l. 培养基配制的一般方法和步骤 (1)称量:按照培养基配方,正确称取各种原料放于搪瓷杯中。 (2)溶化:在搪瓷杯中加入所需水量(根据实验需要加入蒸馏水或自来水),用玻棒搅匀,加热溶解。 (3)调pH值(调pH也可以在加琼脂后再调),用1N NaOH或1N HCl调pH,用pH试纸对照。 (4)加琼脂溶化,在琼脂溶化过程中,需不断搅拌,并控制火力不要使培养基溢出或烧焦,待完全溶化后,补足所失水分,一般数量少,时间短不必补水。 (5)分装:在漏斗架上分装。根据不同的需要进行分装,一般制斜面的装置为管高的1/5 特别注意不要使培养基粘污在管(瓶)口上以免浸湿棉塞,引起污染。 (6)包扎成捆、挂上标签。培养基分装好后,塞上棉塞,用防水纸包扎成捆挂上所配培养基名称的标签。 (7)灭菌备用。灭菌后如需制成斜面的,应在下磅后取出,摆成斜面(见图6-1)。培养基经灭菌
课程名称:材料科学与工程基础实验指导老师:李雷成绩:__________________ 实验名称:介电材料电学性能实验类型:同组学生姓名:13组 一、实验目的和要求(必填)二、实验内容和原理(必填) 三、主要仪器设备(必填)四、操作方法和实验步骤 五、实验数据记录和处理六、实验结果与分析(必填) 七、讨论、心得 一、实验目的 1、了解低损耗介电材料在微波通讯技术中的应用; 2、了解介质谐振法的测试原理; 3、掌握利用介质谐振法测试低损耗材料微波介电性能的技术。 二、实验原理 微波指频率介于300MHz和300GHz之间的电磁波,在通讯领域有着非常广泛的应用。而微波介质材料指适用于微波频段的低损耗(通常在10-3数量级以下)、温度稳定型电介质材料(通常为陶瓷材料),被广泛应用于微波介质谐振器、振荡器、滤波器、双工器、微波电容器及微波基板等,是移动通讯、卫星通讯、全球卫星定位系统(GPS)、蓝牙技术以及无线局域网(WLAN)等现代微波通讯技术的关键材料之一。 对于工作于较低频率下的介电材料,一般用介电常数?r、介电损耗tanδ及介电性能的温度依赖性表征其介电性能。而对工作于微波频段的损耗介质材料,相对应的三个基本参数及其要求则为:合适的介电常数?r、高Qf值及近零谐振频率温度系数τf。其中。当微波介质材料作为谐振单元使用时,应具有较高的介电常数,以 满足器件小型化的需要;而当其作为微波基板使用时,由于微波在基板中传播的速
度,为了减小微波电路中的延迟,介质材料应具有尽可能低的介电常数?r。Qf值定义为品质因子Q(介电损耗tanδ的倒数)与频率的f的乘积,单位为GHz。高Qf值对应微波介质材料作为谐振单元使用时的良好频率选择性及作为微波基板使用时的低信号衰减。一般认为,低损耗材料在微波频段的Qf值为不随频率变化的常数。低损耗微波介质材料作为谐振单元使用时,其谐振频率f 通常随温度线性变化,故用谐振频率温度系数τf表征其温度稳定性,定义为,单位为ppm/, 其中T 2和T 1 表示两个测试温度。本实验课中只涉及介电常数?r及Qf值的测试。 在测试频率较低、试样尺寸远小于电磁波波长时(如1MHz以下),可以把片状 介质材料两端面镀上金属电极、构成平板电容器,直接用LCR仪或阻抗分析仪测试其介电性能。但当频率升至微波频段时,试样尺寸已可与电磁波波长相比拟,以上方法不再适用。 对于低损耗介质材料,其微波介电性能需用网络分析仪及介质谐振法进行测试。网络分析仪通常有两个端口,均可发射和接受微波信号,其测试参数为S参数,定义为接收与发射信号电压的比值,为模在0-1间的复数。S参数常用对数形式表示,定义为20loge∣S∣,取值在-∞ ~0之间,单位为dB。由S参数的定义知:两端口网络分析仪中共有四个S参数:S11,S21,S12,S22,其中第一、二个下标分别表示接收及发射端口。圆柱形金属空腔即为最简单的微波谐振器,其谐振频率f 及品质因子Qu由空腔的尺寸及金属内壁的表面电导率决定。用低损耗介质材料部分填充 金属腔,即构成介质谐振器,其谐振频率f 及品质因子Qu由试样的尺寸、介电性能(?r、Qf值)及金属腔的性质(尺寸及表面电导率)共同决定。因此,通过测试介 质谐振器谢振峰的性质(谐振频率f 及品质因子Qu),即可通过数值方法求解出待测试样的?r及Qf值。 三、测试步骤 1)将试样尺寸及估计的介电常数输入至程序,计算介质谐振器大致的谐振频率范围。 2)在估计的频率范围内找到谐振峰(对应于S21)参数的最大值。 3)将谐振频率处的S21参数调至-40dB以下,记录谐振频率f 及3dB带宽△f。
自动控制原理实验报告 一、实验名称:一、二阶系统的电子模拟及时域响应的动态测试 二、实验目的 1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系 2、学习在电子模拟机上建立典型环节系统模型的方法 3、学习阶跃响应的测试方法 三、实验内容 1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间T s 2、建立二阶系统电子模型,观测并记录不同阻尼比的响应曲线,并测定超调量及过渡过程时间T s 四、实验原理及实验数据 一阶系统 系统传递函数: 由电路图可得,取则K=1,T分别取:0.25, 0.5, 1 T 0.25 0.50 1.00 R2 0.25MΩ0.5M Ω1MΩ C 1μ1μ1μ T S 实测0.7930 1.5160 3.1050 T S 理论0.7473 1.4962 2.9927 阶跃响应曲线图1.1 图1.2 图1.3 误差计算与分析 (1)当T=0.25时,误差==6.12%; (2)当T=0.5时,误差==1.32%; (3)当T=1时,误差==3.58% 误差分析:由于T决定响应参数,而,在实验中R、C的取值上可能存在一定误差,另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。 实验结果说明 由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。 二阶系统 图1.1 图1.2 图1.3
系统传递函数: 令 二阶系统模拟线路 0.25 0.50 1.00 R4 210.5 C2 111 实测45.8% 16.9% 0.6% 理论44.5% 16.3% 0% T S实测13.9860 5.4895 4.8480 T S理论14.0065 5.3066 4.8243 阶跃响应曲线图2.1 图2.2 图2.3 注:T s理论根据matlab命令[os,ts,tr]=stepspecs(time,output,output(end),5)得出,否则误差较大。 误差计算及分析 1)当ξ=0.25时,超调量的相对误差= 调节时间的相对误差= 2)当ξ=0.5时,超调量的相对误差==3.7% 调节时间的相对误差==3.4% 4)当ξ=1时,超调量的绝对误差= 调节时间的相对误差==3.46% 误差分析:由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。 实验结果说明 由本实验可以看出,当ωn一定时,超调量随着ξ的增加而减小,直到ξ达到某个值时没有了超调;而调节时间随ξ的增大,先减小,直到ξ达到某个值后又增大了。 经理论计算可知,当ξ=0.707时,调节时间最短,而此时的超调量也小于5%,此时的ξ为最佳阻尼比。此实验的ξ分布在0.707两侧,体现了超调量和调节时间随ξ的变化而变化的过程,达到了预期的效果。 图2.2 图2.1 图2.3
Linux程序设计实验报告1 ——操作系统基本命令使用 一、实验目的 1.通过对Emacs、vi、vim、gedit文本编辑器的使用,掌握在Linux环境下文本文件的编辑方法; 2.通过对常用命令mkdir、cp、cd、ls、mv、chmod、rm等文件命令的操作,掌握Linux操作系统中文件命令的用法。 二、实验任务与要求 1.emacs的使用,要求能新建、编辑、保存一个文本文件 2.vi或vim的使用,要求能新建、编辑、保存一个文本文件 3.gedit的使用,要求能新建、编辑、保存一个文本文件 4.掌握mkdir、cd命令的操作,要求能建立目录、进入与退出目录 5.掌握cp、ls、mv、chmod、rm命令的操作,要求能拷贝文件、新建文件、查看文件、文件重命名、删除文件等操作。 三、实验工具与准备 计算机PC机,Linux Redhat Fedora Core6操作系统 四、实验步骤与操作指导 任务1.学习emacs的使用,要求能新建、编辑、保存一个文本文件 (1)启动emacs (2)输入以下C程序 (3)保存文件为kk.c (4)用emacs打开文件kk.c (5)修改程序 (6)另存为文件aa.txt并退出。 任务2.vi或vim的使用,要求能新建、编辑、保存一个文本文件 (1)点击”应用程序”→ “附件”→“终端”,打开终端,在终端输入命令: [root@localhost root]#vi kk.c 按i键,进入插入状态。 (2)输入以下C程序 #include
printf(“Hello world!\n”); return 0; } 此时可以用Backspace、→、←、↑、↓键编辑文本。 (3)保存文件为kk.c 按Esc键,进入最后行状态,在最后行状态输入:wq保存文件,退出vi。 (4)用vi打开文件kk.c,输入命令: [root@localhost root]#vi kk.c (5)修改程序为: #include
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
自动控制原理实验报告 学院: 班级: 姓名: 学号:
西安交通大学实验报告 课程自动控制原理实验日期2014 年12月22 日专业班号交报告日期 2014 年 12月27日姓名学号 实验五直流电机转速控制系统设计 一、实验设备 1.硬件平台——NI ELVIS 2.软件工具——LabVIEW 二、实验任务 1.使用NI ELVIS可变电源提供的电源能力,驱动直流马达旋转,并通过改变电压改变 其运行速度; 2.通过光电开关测量马达转速; 3.通过编程将可变电源所控制的马达和转速计整合在一起,基于计算机实现一个转速自 动控制系统。 三、实验步骤 任务一:通过可变电源控制马达旋转 任务二:通过光电开关测量马达转速 任务三:通过程序自动调整电源电压,从而逼近设定转速
编程思路:PID控制器输入SP为期望转速输出,PV为实际测量得到的电机转速,MV为PID输出控制电压。其中SP由前面板输入;PV通过光电开关测量马达转速得到;将PID 的输出控制电压接到“可变电源控制马达旋转”模块的电压输入控制端,控制可变电源产生所需的直流电机控制电压。通过不断地检测马达转速与期望值对比产生偏差,通过PID控制器产生控制信号,达到直流电机转速的负反馈控制。 PID参数:比例增益:0.0023 积分时间:0.010 微分时间:0.006 采样率和待读取采样:采样率:500kS/s 待读取采样:500 启动死区:电机刚上电时,速度为0,脉冲周期测量为0,脉冲频率测量为无限大。通过设定转速的“虚拟下限”解决。本实验电机转速最大为600r/min。故可将其上限值设为600r/min,超过上限时,转速的虚拟下限设为200r/min。 改进:利用LabVIEW中的移位寄存器对转速测量值取滑动平均。
课程名称: 电工电子学实验 指导老师: _ 实验名称: 一、实验目的 1?掌握单相半波及桥式整流电路的工作原理。 2?观察几种常用滤波电路的效果。 3?掌握集成稳压器的工作原理和使用方法。 、主要仪器设备 1. XJ4318型双踪示波器。 2. DF2172B 型交流毫伏表。 3. MS8200G 型数字万用表。 4. MDZ — 2型模拟电子技术实验箱。 5?单级放大、集成稳压实验板。 三、实验内容 1?单相整流、滤波电路 取变压器二次侧电压 15V 挡作为整流电路的输入电压 U 2,并实测U 2的值。负载电阻R L =240 Q,完成表 18-1所给各电路的连接和测量。 (注:以下各波形图均在示波器 DC 挡测得) 沖八丿■爭实验报告 专业: 应用生物科学 姓名: 学号:—_ 日期: 地点: _____________ 直流稳压电源
16.20 0.61 +10Q 1525 **fL/V if n/iiMi * ■百* 2S ?et/v 25 10 1S 20 2S 0.038 T- 王环役2 10叩F R l |…L Io 15.45 11.89 16.30 0.44 5.7 1.3 0.028 0.479 0.080 1+ 丰470|iF R t +470?F 16.96 0.97 0.057 ion T- If IW/flU 丄Rd I W L 16.16 0.183 0.011
2?集成稳压电路 (1)取变压器二次侧电压15V挡作为整流电路的输入电压U2,按图18-2连接好电路,改变负载电阻值R L, 完成表18-2的测量。(注:以下各波形图均在示波器DC挡测得) 图18-2整流、滤波、稳压电路 ⑵取负载电阻R L=120 Q不变,改变图18-2电路输入电压U2(调变压器二次侧抽头),完成表18-3的测量。(注:以下各波形图均在示波器DC挡测得)
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也
实验指导书第四章word操作 P74 五、实验报告 第1,2题 1.写出操作题的步骤,并附上课程表 ①题目一 Ⅰ新建Word文档 Ⅱ在文本编辑区输入“Word实验基本操作1” Ⅲ文件→另存为“Word练习-1” ②题目2 Ⅰ文本编辑区输入文字 Ⅱ“复制”“粘贴”移动文字 Ⅲ在行首回车。空白行输入“大熊猫” Ⅳ开始→替换→查找内容“小熊猫”→“替换为”“大熊猫”→“全部替换” ③题目3 Ⅰ选择标题,选择字体、字号、字体颜色,并单击“居中”按钮 Ⅱ单击框线按钮的下箭头,选择“边框与底纹”。选项卡中图案中样式选20,颜色选红色。 Ⅲ选择正文,选择字号为四号 Ⅳ“段落”→“缩进与间距”→首行缩进、2字符、行距为固定值20磅 Ⅴ“纸张”→“纸张大小”“32开”→“页边距”左右边距2cm、上下边距1.2cm Ⅵ页面布局中“页面设置”→“分栏”“两栏” Ⅶ打印“文件”→打印 ④题目4 Ⅰ“插入”→“表格”→建立2*4的表格 Ⅱ输入文字,将文字设为五号 Ⅲ将鼠标指针移动至分隔线上,拖动鼠标调整列宽 Ⅳ表格→“设计”→“表格样式”→“底纹” Ⅴ选择表格→“表格”“布局”→“对齐方式”→“中部两端对齐” ⑤题目5 Ⅰ插入→图片→选择图片插入 Ⅱ右键图片→“大小和位置”→“布局”→“文字环绕”“紧密型” Ⅲ选择图片,拖动缩放块改变图片大小与位置 Ⅳ插入→文本“艺术字”→在框中输入文字→设置字体与字号、首行缩进 选择艺术字→“绘图工具”→“格式”→“形状样式”→“形状效果”→“预设4” ⑥题目6 Ⅰ插入→分页插入一个空白页 Ⅱ选择首行,样式→“清除格式” 首页行首输入文字,设置字体字号、“水平居中”。“页面设置”→“版式”→“居中” Ⅲ文档最后,按enter新建一页 Ⅳ插入艺术字,设置“四周型环绕”“三维旋转”,拖动到页面中央 Ⅴ插入→“页眉与页脚”“页眉”→“空白”输入文字 Ⅵ“页眉与页脚工具”→“设计”“选项”“首页不同”→“位置”顶端与底端设为 0.5cm
实验三 利用MATLAB 导出连续状态空间模型的离散化模型 实验目的: 1、基于对象的一个连续时间状态空间模型,导出其相应的离散化状态空间模型; 2、通过编程、上机调试,掌握离散系统运动分析方法。 实验原理: 给定一个连续时间系统的状态空间模型: ()()()()()() x t Ax t Bu t y t Cx t Du t =+=+ (3.1) 状态空间模型(3.1)的输入信号()u t 具有以下特性: ()(),u t u kT kT t kT T =≤≤+ (3.2) 已知第k 个采样时刻的状态()x kT 和第k 个采样时刻到第1k +个采样时刻间的输入()()u t u kT =,可得第1k +个采样时刻(1)k T +处的状态 (1)((1))((1))()((1))()k T kT x k T k T kT x kT k T Bu d τττ++=Φ+-+Φ+-? (3.3) 其中: ((1))((1))A k T kT AT k T kT e e +-Φ+-== ((1))((1))A k T k T e ττ+-Φ+-= 由于输入信号在两个采样时刻之间都取常值,故对式(3.3)中的积分式进行一个时间变量替换(1)k T στ=+-后,可得 0((1))()()()AT A x k T e x kT e d Bu kT τ σσ+=+? (3.4) 另一方面,以周期T 对输出方程进行采样,得到 ()()()y kT Cx kT Du kT =+ 在周期采样的情况下,用k 来表示第k 个采样时刻kT 。因此,连续时间状态空间模型
(3.1)的离散化方程可以写成 (1)()()()()()()() x k G T x k H T u k y k Cx k Du k +=+=+ (3.5) 其中: 0()()()AT A G T e H T e d B τσσ==? (3.6) 已知系统的连续时间状态空间模型,MATLAB 提供了计算离散化状态空间模型中状态矩阵和输入矩阵的函数: [G ,H]=c2d(A,B,T) 其中的T 是离散化模型的采样周期。 实验步骤 1、导出连续状态空间模型的离散化模型,采用MA TLAB 的m-文件编程; 2、在MA TLAB 界面下调试程序,并检查是否运行正确。 例3.1 已知一个连续系统的状态方程是 010()()()2541x t x t u t ????=+????--???? 若取采样周期0.05T =秒,试求相应的离散化状态空间模型。 编写和执行以下的m-文件: A=[0 1;-25 –4]; B=[0;1]; [G ,H]=c2d(A,B,0.05) 得到 G= 0.9709 0.0448 -1.1212 0.7915 H= 0.0012 0.0448 因此,所求的离散化状态空间模型是 0.97090.04480.0012(1)()()1.12120.79150.0448x k x k u k ????+=+????-????