
第九章 结构的动力计算
一、是非题
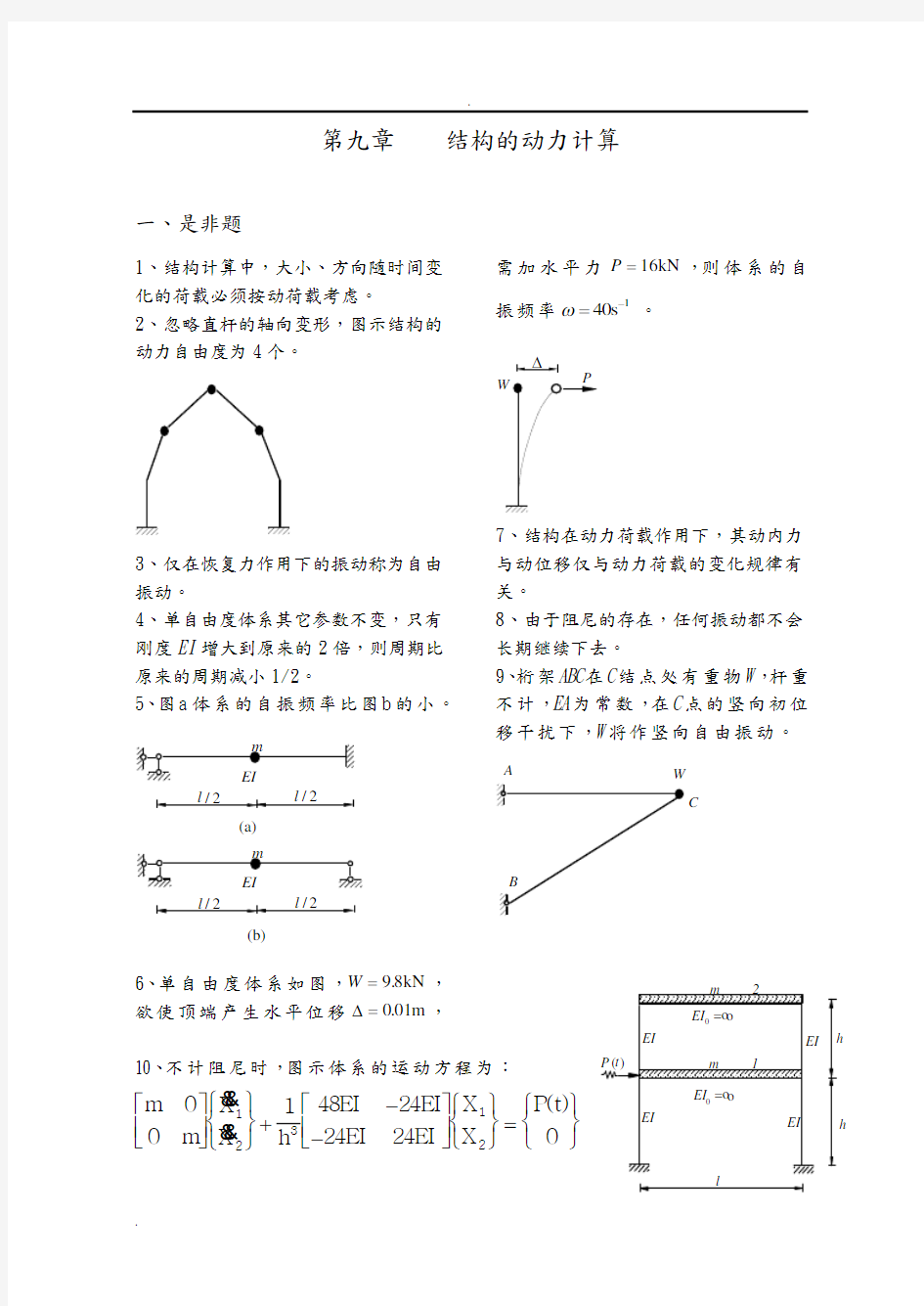
1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。
2、忽略直杆的轴向变形,图示结构的动力自由度为4个。
3、仅在恢复力作用下的振动称为自由振动。
4、单自由度体系其它参数不变,只有刚度EI 增大到原来的2倍,则周期比原来的周期减小1/2。
5、图 a 体 系 的 自 振 频 率 比 图 b 的 小 。
l /2
l /2
l /2
l /2(a)(b)
6、单 自 由 度 体 系 如 图 ,W =98.kN ,欲 使 顶 端 产 生 水 平
位 移 ?=001.m ,需 加 水 平 力 P =16kN ,则 体 系 的 自
振 频 率 ω=-40s 1
。
?
7、结构在动力荷载作用下,其动内力与动位移仅与动力荷载的变化规律有关。
8、由于阻尼的存在,任何振动都不会长期继续下去。 9、桁 架 ABC 在 C 结 点 处 有 重 物 W ,杆 重 不 计
,EA 为 常 数 ,在 C 点 的 竖 向 初 位 移 干 扰 下 ,W 将 作 竖 向 自 由 振 动 。
A
C
10、不 计 阻 尼 时 ,图 示 体 系 的 运 动 方 程 为 :
m m X
X h EI EI EI EI X X P t 00148242424012312????????????+--????????????=??????
&&&&()
二、选择题
1、图 示 体 系 ,质 点 的 运 动 方 程 为 : A .()()()y l Ps in my EI =-77683θ t &&/; B .()()my EI y l Ps in &&/+=19273θ t ;
C .()()my EI y l Ps in &&/+=38473θ t ;
D .()()()y l Ps in my EI =-7963θ t &&/ 。
l
l
0.50.5
2、在 图 示 结 构 中 ,若 要 使 其 自 振 频 率 ω增 大 ,可 以
A .增 大 P ;
B .增 大 m ;
C .增 大 E I ;
D .增 大 l 。
l
t )
3、单 自 由 度 体 系 自 由 振 动 的 振 幅 取 决 于 : A .初 位 移 ;
B .初 速 度 ;
C .初 位 移 、初 速 度 与 质 量 ;
D .初 位 移 、初 速 度 与 结 构 自 振 频 率 。 4、考 虑 阻 尼 比 不 考 虑 阻 尼 时 结 构 的 自 振 频 率 :
A .大 ;
B .小 ;
C .相 同 ;
D .不 定 ,取 决 于 阻 尼 性 质 。
5、已 知 一 单 自 由 度 体 系 的 阻 尼 比 ξ=12.,则 该 体 系
自 由 振 动 时 的
位 移 时 程 曲 线 的 形 状 可
能
为 :
D.
C.
B.
A.
6、图 a 所 示 梁 ,梁 重 不 计 ,其 自 振
频 率 ()
ω=76873
EI ml /;今 在 集 中
质 量 处 添 加 弹 性 支 承 ,如 图 b 所 示 ,则 该 体 系 的 自 振 频 率 ω为 :
A .
()
76873EI ml k m //+;
B .()76873EI ml k m //-;
C .
()76873
EI ml k m //-; D .()76873
EI ml k m //+ 。
l l
/2
/2
l l
/2
/2(a)(b)
7、图 示 结 构 ,不 计 阻 尼 与 杆 件 质 量 ,若 要 其 发 生 共 振 ,θ 应 等 于 A .23k m ; B .k m 3;
C .25k m ;
D .k m
5 。
t
sin θl /2
l /2
l /2
8、图 示 两 自 由 度 体 系 中 ,弹 簧 刚 度
为 C ,梁 的 EI = 常 数 ,其 刚 度 系 数 为 :
A .k EI l k C k k 113
221221480====/,, ; B .k EI l C k C k k C 113
22122148=+===-/,, ; C .k EI l C k C k k C 113
22122148=+===/,, ; D .k EI l k C k k C 113
22122148==
==/,, 。
l /2
l /2
9、图 为 两 个 自 由 度 振 动 体 系 ,其 自 振 频 率 是 指 质 点 按 下 列 方 式 振 动 时 的 频 率 :
A .任 意 振 动 ;
B .沿
x 轴 方 向 振 动 ;
C .沿 y 轴 方 向 振 动 ;
D .按 主 振 型 形 式 振 动 。
10、图 示 三 个 主 振 型 形 状 及 其 相 应 的 圆 频 率 ω,三 个 频 率 的 关 系 应 为 :
A .ωω
ω
a b c <<; B .ωωωb c a <<; C .ωωωc a b <<; D .ωωωa b c >> 。
(a)
(b)
(c)
ωa
ωb ωc
三、填充题
1、不 计 杆 件 分 布 质 量 和 轴 向 变 形 ,刚 架 的 动 力 自 由 度 为 :
(a) ,(b) ,(c) ,(d) ,(e) ,(f) 。
(d)
2、图示组合结构,不计杆件的质量,其动力自由度为 个。
3、图 示 简 支 梁 的 EI = 常 数 ,
其 无 阻 尼 受 迫 振 动 的
位 移 方 程 为 。
/3
l /3
l /3
l
4、图 示 体
系 的 自 振 频 率 ω= 。
l
l
5、图 示 体 系 中 ,已 知 横 梁 B
端 侧 移 刚 度 为 k 1 ,弹 簧 刚 度 为 k 2 ,则 竖 向 振 动 频 率 为 。
2
6、在 图 示 体 系 中 ,横 梁 的 质 量 为 m ,其 EI 1=∞;柱 高 为l ,两 柱 EI = 常 数 ,柱 重 不 计 。不 考 虑 阻 尼 时 ,动 力 荷 载 的 频 率 θ=
时 将
发 生 共 振 。
P sin t
θ 7、单 自 由 度 无 阻 尼 体 系 受 简 谐 荷 载 作 用 ,若 稳 态 受 迫 振 动 可 表 为 y y t =??μθst sin ,则 式 中 μ 计 算 公 式 为 , y s t 是 。
8、图 示 体 系 不 计 阻 尼 ,
θωω=2(为 自 振 频 率 ),其 动 力 系 数 =μ 。
其中δ22等于。
10、多自由度体系自由振动时的任何位移曲线,均可看
成
的线性组合。
四、计算题
1、图示梁自重不计,杆件无弯曲变形,
弹性支座刚度为k,求自振频率ω。
l/2l/2
2、求图示体系的自振频率ω。
l l
0.5l
0.5
3、求图示体系的自振频率ω。EI = 常
数。
l
l0.5
4、求图示结构的自振频率ω。
l l
5、求图示体系的自振频率ω。EI=常
数,杆长均为l。
6、求图示体系的自振频率ω。杆长均
为l。
7、图示梁自重不计,
W EI ==??2002104
kN kN m 2
,,求自振圆频率ω。
B
2m
2m
8、求图示单自由度体系的自振频率。已知其阻尼比ξ=0.05。
m
9、图示刚架横梁∞=EI 且重量W 集中于横梁上。求自振周期T 。
EI
EI
W
EI 2
10、求图示体系的自振频率ω。各杆EI = 常数。
a a
a
l /2
l /2(a)l /2
l /2(b)
12、图示桁架在结点C 中有集中重量W ,各杆EA 相同,杆重不计。求水平自振周期T 。
3W m 3m
13、忽略质点m 的水平位移,求图示桁架竖向振动时的自振频率ω。各杆EA = 常数。
m 4m
4m
14、求图示体系的运动方程。
l
l
m
0.50.5
15、图示体系
kN,5 s 20 kN/cm 102-124==?=P ,,EI θ 2cm kN, 480020==I W 。求质点处最大动位移和最大动弯矩。
W
4m
m
2sin P t
16、图示体系,已知质量m = 300kg ,EI l =??=910462N m m , ;支座B 的
弹簧刚度系数k EI l 03
48=/,干扰力幅
值P =20kN ,频率θ=80s -1
。试计算该体系无阻尼时的动力放大系数μD1和当系统阻尼比ξ=005.时的有阻尼动力放大系数μD2 。
l /2
l /2
17、求图示体系在初位移等于l/
1000,
初速度等于零时的解答。θωω=
020
.( 为自振频率),不计阻尼。
m
18、图示体系受动力荷载作用,不考虑阻尼,杆重不计,求发生共振时干扰力的频率θ。
/3
P t
sin( )
19、已知:m P ==38t, kN ,干扰力转
速为150r/min ,不计杆件的质量,EI =??6103kN m 2。求质点的最大动力位移。
2m
2m
20、图示体系中,电机重kN 10=W 置于刚性横梁上,电机转速n r =500/min ,水平方向干扰力为
) sin(kN 2)(t t P θ?=,
已知柱顶侧移刚度kN/m 1002.14?=k
,自振频率
ω=
-100s 1。求稳态振动的振幅及最大动力弯矩图。
( )
t m
21、图示体系中,kN 10=W ,质点所在点竖向柔度m kN /10917.14-?=δ,马达动荷载P t t ()sin()=4kN θ,马达转速n r =600/min 。求质点振幅与最大位移。
22、图示单自由度体系,欲使支座A 负弯矩与跨中点D 的正弯矩绝对值相等,求干扰力频率θ。EI =常数。
l
l /2
l
23、求图示体系支座弯矩M A 的最大值。荷载P t P t (),.==004sin θθω 。
l l /2
/2
24、求图示体系稳态阶段动力弯矩幅
值图。θωω=05.( 为自振频率),EI = 常数,不计阻尼。
l
l
l
25、试 列 出 图 示 体 系 的 振 幅 方 程 。
12层间侧移刚度均为k 。求自振频率及主振型。
m 1
m 2
2
1
27、求图示体系的自振频率并画出主振型图。
m
28、求图示体系的自振频率和主振型。
EI = 常数。
l l
29、求 图 示 体 系 的 自 振 频 率 及 绘 主 振 型 图 。已 知 EI 24960010=??kN cm 2, m l ==24kg m , 。
.
l
l
30、图示体系,设质量分别集中于各
层横梁上,
数值均为m 。求第一与第二自振频率之比ωω12:。
2
31、求图示体系的自振频率和主振型。m m m m 1
22==,。
32、求图示体系的频率方程。
l
33、图示体系分布质量不计,EI = 常数。求自振频率及 绘 主 振 型 图。
a
a
34、图示简支梁EI = 常数,梁重不计,m m m m 122==,,已求出柔度系数()δ123718
=a EI /。求自振频率及主振型。
a
a
a
35、求图示梁的自振频率及主振型,并画主振型图。杆件分布质量不计。
a
a
a
36、图示刚架杆自重不计,各杆EI = 常数。求自振频率和主振型。
2m
2m
2m
37、求图示体系的自振频率及主振型图。EI = 常数。
l/2l/2l
/2l/2
38、求图示结构的自振频率和主振型图。不计自重。
l/2l/2
39、求图示体系的自振频率和主振型图。不计自重,EI = 常数。
m
a a
a
40、求图示体系的自振频率和主振型
图。已知:m m m
12
==。EI = 常数。
m
1.51
m
1.5m1m
1m
41、求图示体系的自振频率和主振型,并作出主振型图。已知:m m m
12
==,EI = 常数。
2m 2
4m4m
42、求图示结构的自振频率和主振型图。
l/2
l/2
l/
43、求图示体系的自振频率和主振型图。设EI = 常数。
l
44、求图示体系的自振频率和主振型图。EI = 常数。
45、求图示体系的第一自振频率。
l/2l/2l/2l/2
46、求图示对称体系的自振频率和主振型图。EI = 常数。
l l l l
/2/2/2/2
47、求图示体系的自振频率及相应主振型图。EI = 常数。
/2l
l
/2l /2l /2
l
48、图示三铰刚架各杆EI =常数,杆自重不计。求自振频率与主振型图。
l l
49、用最简单方法求图示结构的自振频率和主振型图。
l
l
50、求图示体系的自振频率和主振型图。EI =常数。
2
a
a
a
51、求图示体系的自振频率和主振型。不计自重,EI = 常数。
a /2
a /2
a /2
a /2
52、求图示桁架的自振频率和主振型,标出质点的主振型方向并验算主振型正交性。各杆
EA = 常数。
m
53、求图示桁架的自振频率和主振型。杆件自重不计。
m 3m
3m
54、求图示桁架的自振频率和主振型,标出质点的主振型方向。不计杆件自重,EA = 常数。
m m
m
33
55、作图示体系的动力弯矩图。柱高均为h ,柱刚度EI =常数。
l l
θ=13257.EI
mh
3
0.50.5P
56、图示刚架梁为刚性杆,柱为等截
面弹性杆,EI =常数。求在图示荷载作用下,梁的最大动位移值。设 sin sin ,2)(,)(21θt P t P θt P t P -==
m m m m mh EI ===213
,5.0,)/(12θ 。
h
57、作出图示体系的动力弯矩图,已知:θ=082567
3
.EI
ml 。 0.5l
2
m
58、求图示体系各质点的振幅。已知θ=83EI ml /(),杆长均为l ,EI =常
数,m m m m 122=
=, 。
P t sin()
59、图示体系 ,欲使m 1处的振幅为
零,确定干扰力的振动频率θ。
EI =常数。
l
l
l
l
60、绘出图示体系的最大动力弯矩图。已知:动荷载幅值P =10kN ,
θ=-209441.s ,质量m =500kg ,
a =2m ,EI =??
481062.N m
。
m
()P t sin θ
61、已知图示体系的第一振型如下,
求体系的第一频率。EI = 常数。
振型101618054011 ..???????
?
?? /2
62、图示双自由度振动系统,
已知刚度
矩阵:
[]K EI
=
-
-
?
?
?
?
?
?
0359
0172
.
.
0.172
0.159
主振型向量
{}[]{}
Y Y
12
110924
==-
1.624T T
,[.],
质量
m m m m m EI
12
8
23101510
====??
,,.
t, N m2。
试求系统的自振频率。
2
1
常数
2
1
常数
63、用能量法求图示体系的第一频率
64、图示等截面均质悬臂梁,m
为单位质量,在跨中承受重量为W
的
重物,试用 Rayleigh 法求第一频率。(设悬臂梁自由端作用一荷载P ,并选择这个荷载所产生的挠曲线为振型函数,即:
()()()()()()
V x Pl EI x l x l V x l x l V
=-=-
3233
233
33232
///;为P 作用点的挠度) 。
l l
/2/20
P
第九章结构的动力计算(参考答案)
一、
1、(X)
2、(O)
3、(X)
4、(X)
5、(X)
6、(O)
7、(X)
8、(X)
9、(X) 10、(O)
二、
1、(A)
2、(C)
3、(D)
4、(B)
5、(D)
6、(D)
7、(B)
8、(B)
9、(D) 10、(A)
三、
1、 2 , 2 , 1 , 1 , 2 , 2
2、 5
3、
()()()()()t P EI /l EI /l t y
m t y sin 4867243433θ?+?-=&& 4、()
323
EI ml /
5、
)
k k (m k k 212
1+
6、()
36ml /EI 7、,,)
/(1/(11st 2
P y ?=-=ωθμ
为 简 谐 荷 载 幅 值 作 为 静 力 引 起 的 质 点 位 移。 8、 -1 9、 1121//k k + 10、主 振 型
四、
1、()W /kg 4=ω
2、)ml /(EI ,EI /l 32316483==ωδ
3、)5/(48,48/5323ml EI EI l ==ωδ
4、3
3477.11124ml
EI
ml EI ==
ω 5、)5/(3,3/5323ml EI EI l ==ωδ
6、32
3119,/9ml EI l EI k ==ω 7、1
s 2.54-=ω
8、()
'=ω2453
./EI ml
9、()
T Wh
EIg =2483
π/
10、)/(889.23ma EI =ω
11、2:1:=b a ωω
12、)/(56.16EAg W T
=
13、m EA m 5.10//1==δω
14、16)sin(533
t P y l
EI y m θ=+&& 15、
cm
Ystp Y M ml EI 3029.1,,
127.3)/1/(1,s 25.24)2/8/(Max Mstp Dmax 22-1====-===μμωθμω
16、
自振频率:
无阻尼时放大系数:55211D .=μ 有阻尼时放大系数:54512D .=μ
17、
),
sin(04167.1)sin(20833.0)cos(001.0,1000/ ,),sin()cos()sin(,04067.1 ,/st st st 2
2st t Y t Y t l Y l B Y A t m P
t B t A Y m P Y D
D D θωωω
θ
μθμωωωμω+-===++=== 18、)/(273ml EI =θ
19、-1s 92.38=ω ,-1s 71.15=θ ,19.1=μ ,m 10/09.23m ax =y
20、
,378.1 ,s 36.52-1==βθ m m 27.0 m ,9610.1st 4st ===-y A y β
M M F M D 756.2==β
21、
,s 83.62 ,s 50.71-1-1==θωβ=4389. ;A F ==βδ337.mm ; m m 28.5)(max =+=δβF w y
22、
EI
Pl ,EI l A m A Pl Pl m A l P P 86 2
423
13111112
2-
===+=-?δ?δθθ 3
212ml EI =
θ 23
3
33 , 3l EI
k ml EI ==
ω
运动方程: m
P
y y k ky y m P 165, 21=
+??=+ω&&&& 特征解y *
:
y P m t P m
t *sin .sin =
-=51600595
2
22
ωθω
θθ
1
1
()l P M t l P t l P l P Pl
l y m M A A 0max 000*56.0, sin 56.0 sin )2
0595.0(2==+=+
=θθ&& 24、 12sit 33443
st /P I )),t ((EI
Pl
Y ,/,EI /Pl
Y -=-=
==θμ Pl
13/24
I
25、
k k k k k k k k 111222212212=+===-,,
()()k m A k A P k A k m A 111211221211222220
-+=+-=θθ ,
26、
k k k k k k k 112212212====-,,
ωωω212228080219204682
15102=
??????==k m k m k
m
..,.,.
Y Y Y Y 112112221178110281
==-.,. 27、
k i l k k i l k i l 112211222226630===-=/,/,/, ω11/20146=.(/)EI m , 2/12)/(381.0ml EI =ω,
{}{}?
?
????-=?????
?=24412360121.,.ΦΦ
28、
k EI l k EI l k EI l 1131232231812998==-=/,/,/,
ωω13
2316925245==.
,.EI m l EI
m l
29、
k i l k i l k k i l 11222212212
122412=
===-,,
[][]K EI l M =
--??????=????
?
?23
121212241001,
ωω1232
2
321415605==.
,.EI ml EI ml ; {}{}ΦΦ121061811618=??????=-??????.,.
30、
设k EI l =243
/ 频率方程:
()()()
22,024,03222422
2
2
±=
=+-=---m
k
k km m k
m k m k ωωωωω 828.5:11:1716.0:21==ωω
31、
k EI l k EI l k EI
l 1131232233351=
=-=,, []M m EI ml EI
ml =?????
?==10021673507132
3,.,. ωω []?
?????-=566170661011..Φ
32、
列幅值方程:
?
??=+=+Y Y m X m X Y m X m 22222121221122ωδωδωδωδ, 21210
211122221112m m m m ωδδωωδδω--= δδδδ11
312213223
3243====l EI l EI l EI
,,
2
2
x
δ11
22
33、
{}EI
ma /1211.02123
.3/1T
32==ωλ
)/(874.2,)/(558.03231ma EI ma EI ==ωω
34、
{}EI ma /07350.0125984
.0/1T
32==ωλ
)/(|6886.3,)/(8909.03231ma EI ma EI ==ωω
954
.0/1/2111=Y Y ,()097.2/1/2212
-=Y Y
35、
EI
a EI a 6/,3/231232211===δδδ)/(414.1,)/(0954.13231ma EI ma EI ==ωω
{}λω==1561223////ma EI T
,Y Y Y Y 112112221111//,//()==-
M 1
21
第 二 主 振 型
第 一 主 振 型
图
1
1
1
1
36、
EI EI EI 2834122211
-
===δδδ,,,
???
???==779.0554.812EI m ωλ m EI
m EI 1328.1,3419
.021==ωω
37、
EI
l EI l EI l 96/5,24/,48/532112322311====δδδδ3
231/054.9,/736.2ml EI ml EI ==ωω
565012111./
Y /Y =,()766112212./Y /Y -=
38、
1
.01
,4.101,
16,382,48221221113
2112322311-======Y Y Y Y EI l EI l EI l δδδδ 39、
3
21321/2.397.0;/0975.007.1ma EI EI ma ??????=??????=ωωλλ
61.3/;28.0/)
2(2)2(1)1(2)1(1+=-=A A A A
40、
),
/(7708.1,/)(4393.0),/(3189.0),/(1818.5),/(6875.1),/(1),/(5.4212121122211m EI m EI EI m EI m EI EI EI ====-====ωωλλδδδδ
41、
)
/(6664.2),/(6645.12)
3/(32),/(4),3/(142122211211EI m EI m EI EI EI ===-===λλδδδδ
5
.0:1:,2:1:)/(6124.0,)/(281.022********=ΦΦ-=ΦΦ==m EI m EI ωω 42、
()
06424 , 5.123
213231=--=A l m A l m EI ml
EI ωωω, 0)248(3 , 28
.423
213232=-+=A EI l m A l m ml
EI ωωω 振型1
1
1
振型2
43、ωω132********==./,./EI ml EI ml
对称:,162/53EI l =δ
,)/(69.52/131ml EI =ω 反对称:,/00198.03EI l =δ,)/(46.222/132ml EI =ω
45、3
/48ml EI =ω
46、3
1/47.10ml EI =ω,,/86.1332
ml EI =ω
47、
对称:,)/(191.2 ,24/52/1323
22ml EI EI l ==ωδ
反对称:,8/ ,/4313313
11EI l EI l ===δδδ,48/333EI l =δ
,
)/(69.7,)/(5.02
/1332/131ml EI ml EI ==ωω
{}[]Y 1=1 0.03 -0.03T ,{}[]Y 2=0 1 1T , {}[]Y 3=1 -31.86 31.86T
48、
将振动分为竖向、水平分量,求M 1、M 2,
,0 ,4/ ,16/ 2112322311====δδδδEI l EI l
[],)/(4 ,)/(2 ,/625.0250.0/1323132ml EI ml EI EI ml T
===ωωω
, 10
12=
49、
利用对称性:
反对称:331311 450
.2 6,6l m EI
l m EI EI l ===ωδ, 对称:3
32311 703
.3 796,96l m EI
l m EI EI l ===ωδ 50、 对称:δω22
3230183333032==.,.a EI EI ma ,
反对称:δω11313
407071==a EI EI ma ,.
第九章 结构的动力计算 一、判断题: 1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。 2、仅在恢复力作用下的振动称为自由振动。 3、单自由度体系其它参数不变,只有刚度EI 增大到原来的2倍,则周期比原来的周期减小1/2。 4、结构在动力荷载作用下,其动内力与动位移仅与动力荷载的变化规律有关。 5、图示刚架不计分布质量和直杆轴向变形,图a 刚架的振动自由度为2,图b 刚架的振动自由度也为2。 (a)(b) 6、图示组合结构,不计杆件的质量,其动力自由度为5个。 7、忽略直杆的轴向变形,图示结构的动力自由度为4个。 8、由于阻尼的存在,任何振动都不会长期继续下去。 9、设ωω,D 分别为同一体系在不考虑阻尼和考虑阻尼时的自振频率,ω与ωD 的关系为ωω=D 。
二、计算题: 10、图示梁自重不计,求自振频率ω。 EI l W l/4 11、图示梁自重不计,杆件无弯曲变形,弹性支座刚度为k,求自振频率ω。 EI W o o l/2l/2 k 12、求图示体系的自振频率ω。 m l EI EI l 0.5l 0.5 2 13、求图示体系的自振频率ω。EI = 常数。 m l l0.5 14、求图示结构的自振频率ω。 m l l l l EI=常数
15、求图示体系的自振频率ω。EI =常数,杆长均为l 。 m 16、求图示体系的自振频率ω。杆长均为l 。 EA=o o EI m EI EI 17、求图示结构的自振频率和振型。 m m EI EI EI l /2 l /2 l /2 18、图示梁自重不计,W EI ==??2002104kN kN m 2 ,,求自振圆频率ω。 EI W A B C 2m 2m 19、图示排架重量W 集中于横梁上,横梁EA =∞,求自振周期ω。 h EI EI W
《结构力学》计算题61.求下图所示刚架的弯矩图。 a a a a q A B C D 62.用结点法或截面法求图示桁架各杆的轴力。 63.请用叠加法作下图所示静定梁的M图。 64.作图示三铰刚架的弯矩图。 65.作图示刚架的弯矩图。
66. 用机动法作下图中E M 、L QB F 、R QB F 的影响线。 1m 2m 2m Fp 1 =1m E B A 2m C D 67. 作图示结构F M 、QF F 的影响线。 68. 用机动法作图示结构影响线L QB F F M ,。 69. 用机动法作图示结构R QB C F M ,的影响线。 70. 作图示结构QB F 、E M 、QE F 的影响线。
71.用力法作下图所示刚架的弯矩图。 l B D P A C l l EI=常数 72.用力法求作下图所示刚架的 M图。 73.利用力法计算图示结构,作弯矩图。 74.用力法求作下图所示结构的M图,EI=常数。 75.用力法计算下图所示刚架,作M图。
76. 77. 78. 79. 80. 81. 82.
83. 84. 85.
答案 q A B C D F xB F yB F yA F xA 2qa3 2/ 2qa3 2/ q2a ()2/8 2qa3 2/ =/ qa2 2 取整体为研究对象,由0 A M=,得 2 220 yB xB aF aF qa +-=(1)(2分) 取BC部分为研究对象,由0 C M= ∑,得 yB xB aF aF =,即 yB xB F F =(2)(2分) 由(1)、(2)联立解得 2 3 xB yB F F qa ==(2分) 由0 x F= ∑有20 xA xB F qa F +-=解得 4 3 xA F qa =-(1分) 由0 y F= ∑有0 yA yB F F +=解得 2 3 yA yB F F qa =-=-(1分) 则222 422 2 333 D yB xB M aF aF qa qa qa =-=-=()(2分) 弯矩图(3分) 62.解:(1)判断零杆(12根)。(4分) (2)节点法进行内力计算,结果如图。每个内力3分(3×3=9分)63.解:
结构动力学学习总结
通过对本课程的学习,感受颇深。我谈一下自己对这门课的理解: 一.结构动力学的基本概念和研究内容 随着经济的飞速发展,工程界对结构系统进行动力分析的要求日益提高。我国是个多地震的国家,保证多荷载作用下结构的安全、经济适用,是我们结构工程专业人员的基本任务。结构动力学研究结构系统在动力荷载作用下的位移和应力的分析原理和计算方法。它是振动力学的理论和方法在一些复杂工程问题中的综合应用和发展,是以改善结构系统在动力环境中的安全和可靠性为目的的。高老师讲课认真负责,结合实例,提高了教学效率,也便于我们学生寻找事物的内在联系。这门课的主要内容包括运动方程的建立、单自
由度体系、多自由度体系、无限自由度体系的动力学问题、随机振动、结构抗震计算及结构动力学的前沿研究课题。既有线性系统的计算,又有非线性系统的计算;既有确定性荷载作用下结构动力影响的计算,又有随机荷载作用下结构动力影响的随机振动问题;阻尼理论既有粘性阻尼计算,又有滞变阻尼、摩擦阻尼的计算,对结构工程最为突出的地震影响。 二.动力分析及荷载计算 1.动力计算的特点 动力荷载或动荷载是指荷载的大小、方向和作用位置随时间而变化的荷载。如果从荷载本身性质来看,绝大多数实际荷载都应属于动荷载。但是,如果荷载随时间变化得很慢,荷载对结构产生的影响与
静荷载相比相差甚微,这种荷载计算下的结构计算问题仍可以简化为静荷载作用下的结构计算问题。如果荷载不仅随时间变化,而且变化很快,荷载对结构产生的影响与静荷载相比相差较大,这种荷载作用下的结构计算问题就属于动力计算问题。 荷载变化的快与慢是相对与结构的固有周期而言的,确定一种随时间变化的荷载是否为动荷载,须将其本身的特征和结构的动力特性结合起来考虑才能决定。 在结构动力计算中,由于荷载时时间的函数,结构的影响也应是时间的函数。另外,结构中的内力不仅要平衡动力荷载,而且要平衡由于结构的变形加速度所引起的惯性力。结构的动力方程中除了动力荷载和弹簧力之外,还要引入因其质量产生的惯性力和耗散能量的阻尼力。而
160 结构动力计算习题 一.选择题 8-1 体系的动力自由度是指( )。 A .体系中独立的质点位移个数 B .体系中结点的个数 C .体系中质点的个数 D .体系中独立的结点位移的个数 8-2 下列说法中错误的是( )。 A .质点是一个具有质量的几何点; B .大小、方向作用点随时间变化的荷载均为动荷载; C .阻尼是耗散能量的作用; D .加在质点上的惯性力,对质点来说并不存在 8-3 图示体系EI =常数,不计杆件分布质量,动力自由度相同的为( )。 题8-3图 A .(a )、(b )、(c ) B .(a )、(b ) C .(b )、(c ) D .(a )、(c ) 8-4图示体系不计杆件分布质量,动力自由度相同的为( )。 (b ) (c ) 题8-4图 A .(a )、(b )、(c ) B .(a )、(b ) C .(b )、(c ) D .(a )、(c ) 8-5 若要提高单自由度体系的自振频率,需要( )。 A .增大体系的刚度 B .增大体系的质量 C .增大体系的初速度 D .增大体系的初位移 8-6 不计阻尼影响时,下面说法中错误的是( )。 A .自振周期与初位移、初速度无关; B .自由振动中,当质点位移最大时,质点速度为零; C .自由振动中,质点位移与惯性力同时达到最大值; D .自由振动的振幅与质量、刚度无关 8-7 若结构的自振周期为T ,当受动荷载)(P t F =t F θsin 0作用时,其自振周期T ( )。 A .将延长 B .将缩短 C .不变 D .与荷载频率 θ的大小有关 8-8 若图(a )、(b )和(c )所示体系的自振周期分别为a T 、b T 和c T ,则它们的关系为( )。 (a) (b) (c) 题8-8图 A .a T >b T >c T B .a T >c T >b T C .a T 三、计算题(共5小题,共70 分) = ∣qi (2 分) X ∣ 1 1 ∏2q'2ql (2 分) M A =0= Y2I 1 ql 2 =ql2 =丫 2 Jql (2 分) 2 =1 ql (2 分) 2 2、用机动法求图示多跨静定梁M B、R B、Q C的影响线。(12分) P=1 P=I 3、求图示桁架结点 C 的水平位移,各杆 EA 相等。(15分) P 解:(1)求支座反力:H A= Py A = P,V B = P I- 3m M B 影响线: P=1 B JL 2m 夕冷 2m C D -≡≡M L B 2m 2m J r 3m C -O ---------- 2 2m 2m 2m 2m i A P h-Y- 3m B -H 2m 2m 2m 1 R B 影响线: 2m N BC ~ 0 N BD P N BD=I P *N, Bn P (3)求 N AC 、N AD N AC ' N AD cos45 =P = N AC =° N AD Sin 45 =P= N A ^= 2P N CD N AD cos45 =°= N CD--P (2)求 N BC 、 N BD (4)求 N CD A CH =送 N P N I l =丄 p*5 +J2P*(?*』2*5) =10(1 + EA EA 3、求图示结构B 点竖直方向的位移△ BV 。 ( 12分) q=10kN∕m 20k N 4m (5)外荷载作用下,各杆的轴力 N P 如下: (6) C 点水平单位荷载作用下,各杆的轴力 N 1如下: 4m El 2)PzEA 结构动力学历年试题(简答题) 1.根据荷载随时间的变化规律,动力荷载可以划分为哪几类?每一类荷载包括哪几种,请 简述每一种荷载的特点。P2 2.通过与静力问题的对比,试说明结构动力计算的特点。P3 3.动力自由度数目计算类 4.什么叫有势力?它有何种性质。P14 5.广义力是标量还是矢量?它与广义坐标的乘积是哪个物理量的量纲?P16 6.什么是振型的正交性?它的成立条件是什么?P105 7.在研究结构的动力反应时,重力的影响如何考虑?这样处理的前提条件是什么?P32 8.对于一种逐步积分计算方法,其优劣性应从哪些方面加以判断?P132 9.在对结构动力反应进行计算的思路上,数值积分方法与精确积分方法的差异主要表现在 哪里?第五章课件 10.利用Rayleigh法求解得到的振型体系的基本振型和频率及高阶振型和频率与各自的精确 解相比有何特点?造成这种现象的原因何在?P209 11.根据荷载是否预先确定,动荷载可以分为哪两类?它们各自具有怎样的特点?P1 12.坐标耦联的产生与什么有关,与什么无关?P96 13.动力反应的数值分析方法是一种近似的计算分析方法,这种近似性表现在哪些方面? P132及其课件 14.请给出度哈姆积分的物理意义?P81 15.结构地震反应分析的反应谱方法的基本原理是什么?P84总结 16.某人用逐步积分计算方法计算的结构位移,得到如下的位移时程的计算结果:。。。 17.按照是否需要联立求解耦联方程组,逐步积分法可以分为哪两类?这两类的优劣性应该 如何进行判断?P132 18.根据荷载随时间的变化规律,动力荷载可以划分为哪几类?每一类荷载又包括哪些类型, 每种类型请给出一种实例。P2 19.请分别给出自振频率与振型的物理意义?P103 20.振型叠加法的基本思想是什么?该方法的理论基础是什么?P111参考25题 21.在振型叠加法的求解过程中,只需要取有限项的低阶振型进行分析,即高阶振型的影响 可以不考虑,这样处理的物理基础是什么?P115 22.我们需要用数值积分方法求解一座大型的高坝结构的地震反应时程,动力自由度的总数 为25000个,我们如何缩短计算所耗费的机时?P103 23.什么是结构的动力自由度?动力自由度与静力自由度的区别何在?P11及卷子上答案 24.一台转动机械从启动到工作转速正好要经过系统的固有频率(又称为转子的临界转速), 为减小共振,便于转子顺利通过临界转速,通常采用什么措施比较直接有效?简要说明理由。详解见卷子上答案 25.简述用振型叠加法求解多自由度体系动力响应的基本原理及使用条件分别是什么?若 振型叠加法不适用,可采用何种普遍适用的方法计算体系响应?详解见卷子上答案 26.振型函数边界条件。。。 27.集中质量和一致质量有限元的差异和优缺点,采用这两种有限元模型给出的自振频率与 实际结构自振频率相比有何种关系?P242及卷子上答案 28.人站在桥上可以感觉到桥面的震动,简述当车辆行驶在桥上和驶离桥面的主要振型特征 有何不同? 29.简述用Duhamel积分法求体系动力响应的基本原理,以及积分表达式中的t和τ有何差 精品文档 [0729]《结构力学》 1、桁架计算的结点法所选分离体包含几个结点 A. 单个 2、固定铰支座有几个约束反力分量 B. 2个 3、从一个无多余约束的几何不变体系上去除二元体后得到的新体系是 A. 无多余约束的几何不变体系 4、两刚片用三根延长线交于一点的链杆相连组成 A. 瞬变体系 5、定向滑动支座有几个约束反力分量 B. 2个 6、结构的刚度是指 C. 结构抵抗变形的能力 7、桁架计算的截面法所选分离体包含几个结点 B. 最少两个 8、对结构进行强度计算的目的,是为了保证结构 A. 既经济又安全 9、可动铰支座有几个约束反力分量 A. 1个 10、固定支座(固定端)有几个约束反力分量 C. 3个 11、改变荷载值的大小,三铰拱的合理拱轴线不变。 A.√ 12、多余约束是体系中不需要的约束。 B.× 13、复铰是连接三个或三个以上刚片的铰 A.√ 14、结构发生了变形必然会引起位移,结构有位移必然有变形发生。 B.× 精品文档. 精品文档 15、如果梁的截面刚度是截面位置的函数,则它的位移不能用图乘法计算。 A.√ 16、一根连杆相当于一个约束。 A.√ 17、单铰是联接两个刚片的铰。 A.√ 18、连接四个刚片的复铰相当于四个约束。 B.× 19、虚功原理中的力状态和位移状态都是虚设的。 B.× 20、带拉杆三铰拱中拉杆的拉力等于无拉杆三铰拱的水平推力。 A.√ 21、瞬变体系在很小的荷载作用下会产生很大的内力,所以不能作为结构使用。 A.√ 22、一个无铰封闭框有三个多余约束。 A.√ 23、三铰拱的水平推力不仅与三铰的位置有关,还与拱轴线的形状有关。 B.× 24、三铰拱的主要受力特点是:在竖向荷载作用下产生水平反力。 A.√ 25、两根链杆的约束作用相当于一个单铰。 B.× 26、不能用图乘法求三铰拱的位移。 A.√ 27、零杆不受力,所以它是桁架中不需要的杆,可以撤除。 B.× 15 结构的动力计算判断题 体系的振动自由度等于集中质量数。() 图示体系具有1个振动自由度。() 图示体系具有2个振动自由度。() 图示体系具有3个振动自由度。() 图示体系具有2个振动自由度。() 图示体系具有2个振动自由度。() 结构的自振频率除与体系的质量分布状况、杆件刚度有关外,还与干扰力有关。()自由振动是指不受外界干扰力作用的振动。() 自由振动是由初位移和初速度引起的,缺一不可。() 有阻尼单自由度体系的阻尼比越大,自振频率越小。() 临界阻尼现象是指起振后振动次数很少且振幅很快衰减为零的振动。()惯性力并不是实际加在运动质量上的力。() 计算一个结构的自振周期时,考虑阻尼比不考虑所得的结果要大。()临界阻尼振动时质点缓慢地回到平衡位置且不过平衡点。() 阻尼力总是与质点加速的方向相反。() 在某些情形下建立振动微分方程式时,不考虑重力的影响是因为重力为恒力。() 图示结构的自振频率为w,在干扰力P(t)=P sin qt作用下,不管频率q怎样改变,动位移y(t)的方向总是和P(t)的方向相同。() 计算图示振动体系的最大动内力和动位移时可以采用同一个动力系数。() 不论干扰力是否直接作用在单自由度体系的质量m上,都可用同一个动力系数计算任一点的最大动位移。() 单自由度体系受迫振动的最大动位移的计算公式y max=my j中,y j是质量m的重量所引起的静位移。 () 多自由度体系作自由振动,一般包括所有的振型,不可能出现仅含某一主振型的振动。()解得图(a)所示两个自由度体系的两个主振型为图(b)和图(c),此解答是正确的。() 图(a)与图(b)所示梁的自由振动频率w A、w B相比,w A>w B。() 填空题 动力荷载是指_____________________荷载。 第三章 多自由度系统 试求图3-10所示系统在平衡位置附近作微振动的振动方程。 图3-10 解:(1)系统自由度、广义坐标 图示系统自由度N=2,选x1、x2和x3为广义坐标; (2)系统运动微分方程 根据牛顿第二定律,建立系统运动微分方程如下: ;)(;)()(;)(3 4233332625323122222121111x K x x K x m x K x K x x K x x K x m x x K x K x m ---=------=---=&&&&&& 整理如下 ; 0)(;0)(;0)(3432333332653212222212111=++-=-++++-=-++x K K x K x m x K x K K K K x K x m x K x K K x m &&&&&& 写成矩阵形式 ;000)(0)(0) (0 0000321433365322221321321 ?? ????????=????????????????????+--+++--++????????????????????x x x K K K K K K K K K K K K x x x m m m &&&&&&(1) (3)系统特征方程 设)sin(,)sin(,)sin(332211?ω?ω?ω+=+=+=t A x t A x t A x 代入系统运动微分方程(1)得系统特征方程 ;000)(0)(0)(321234333 2 26532222121?? ????????=????????????????????-+---+++---+A A A m K K K K m K K K K K K m K K ωωω(2) (4)系统频率方程 系统特征方程(2)有非零解的充要条件是其系数行列式等于零, 即 ;0) (0)(0)(234333226532222121=-+---+++---+ωωωm K K K K m K K K K K K m K K 展开得系统频率方程 第九章 结构动力计算 一、是非题 1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。 2、忽略直杆的轴向变形,图示结构的动力自由度为4个。 3、仅在恢复力作用下的振动称为自由振动。 4、单自由度体系其它参数不变,只有刚度EI 增大到原来的2倍,则周期比原来的周期减小1/2。 5、图 a 体 系 的 自 振 频 率 比 图 b 的 小 。 l /2 l /2 l /2 l /2 (a)(b) 6、单 自 由 度 体 系 如 图 ,W =98 .kN ,欲 使 顶 端 产 生 水 平 位 移 ?=001 .m ,需 加 水 平 力 P =16kN ,则 体 系 的 自 振 频 率 ω=-40s 1 。 ? 7、结构在动力荷载作用下,其动内力 与动位移仅与动力荷载的变化规律有关。 8、由于阻尼的存在,任何振动都不会长期继续下去。 9、桁 架 ABC 在 C 结 点 处 有 重 物 W ,杆 重 不 计 , EA 为 常 数 ,在 C 点 的 竖 向 初 位 移 干 扰 下 ,W 将 作 竖 向 自 由 振 动 。 A C 10、不 计 阻 尼 时 ,图 示 体 系 的 运 动 方 程 为 : m m X X h EI EI EI EI X X P t 00148242424012312????????????+--????????????=?????? () 二、选择题 1、图 示 体 系 ,质 点 的 运 动 方 程 为 : A .()()()y l P s in m y EI =-77683θ t /; B .()()m y EI y l P s in /+=19273 θ t ; C .()()m y EI y l P s in /+=38473θ t ; D .()()()y l P s in m y EI =-7963θ t / 。 l l 0.50.5 2、在 图 示 结 构 中 ,若 要 使 其 自 振 频 率 ω增 大 ,可 以 A .增 大 P ; B .增 大 m ; C .增 大 E I ; D .增 大 l 。 l t ) 3、单 自 由 度 体 系 自 由 振 动 的 振 幅 取 决 于 : A .初 位 移 ; B .初 速 度 ; C .初 位 移 、初 速 度 与 质 量 ; D .初 位 移 、初 速 度 与 结 构 自 振 频 率 。 4、考 虑 阻 尼 比 不 考 虑 阻 尼 时 结 构 的 自 振 频 率 : A .大 ; B .小 ; C .相 同 ; D .不 定 ,取 决 于 阻 尼 性 质 。 5、已 知 一 单 自 由 度 体 系 的 阻 尼 比 ξ=12.,则 该 体 系 自 由 振 动 时 的 位 移 时 程 曲 线 的 形 状 可 能 为 : D. C. B. A. 6、图 a 所 示 梁 ,梁 重 不 计 ,其 自 振 频 率 () ω=76873 EI ml /;今 在 集 中 质 量 处 添 加 弹 性 支 承 ,如 图 b 所 示 ,则 该 体 系 的 自 振 频 率 ω为 : A .() 76873 EI ml k m //+; B . ()76873EI ml k m //-; C .()76873 EI ml k m //-; D . () 76873 EI ml k m //+ 。 l l /2 /2 l l /2 /2(a)(b) 7、图 示 结 构 ,不 计 阻 尼 与 杆 件 质 量 ,若 要 其 发 生 共 振 ,θ 应 等 于 A . 23k m ; B .k m 3; 结构动力学与稳定复习 1.1 结构动力计算与静力计算的主要区别是什么? 答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力; (2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。 1.2 什么是动力自由度,确定体系动力自由度的目的是什么? 答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。 确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。 1.3 结构动力自由度与体系几何分析中的自由度有何区别? 答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析的目的是要确定体系能否发生刚体运动。结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确定结构振动形状。1.4 结构的动力特性一般指什么? 答:结构的动力特性是指:频率(周期)、振型和阻尼。动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度)所确定的、表征结构动力响应特性的量。动力特性不同,在振动中的响应特点亦不同。 1.5 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼? 答:振动过程的能量耗散称为阻尼。 产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。当然,也包括结构中安装的各种阻尼器、耗能器。 阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假 结构力学主要知识点 一、基本概念 1、计算简图:在计算结构之前,往往需要对实际结构加以简化,表现其主要特点,略去 其次要因素,用一个简化图形来代替实际结构。通常包括以下几个方面: A、杆件的简化:常以其轴线代表 B、支座和节点简化: ①活动铰支座、固定铰支座、固定支座、滑动支座; ②铰节点、刚节点、组合节点。 C、体系简化:常简化为集中荷载及线分布荷载 D、体系简化:将空间结果简化为平面结构 2、结构分类: A、按几何特征划分:梁、拱、刚架、桁架、组合结构、悬索结构。 B、按内力是否静定划分: ①静定结构:在任意荷载作用下,结构的全部反力和内力都可以由静力平衡条件确定。②超静定结构:只靠平衡条件还不能确定全部反力和内力,还必须考虑变形条件才能确定。二、平面体系的机动分析 1、体系种类 A、几何不变体系:几何形状和位置均能保持不变;通常根据结构有无多余联系,又划分为无多余联系的几何不变体系和有多余联系的几何不变体系。 B、几何可变体系:在很小荷载作用下会发生机械运动,不能保持原有的几何形状和位置。常具体划分为常变体系和瞬变体系。 2、自由度:体系运动时所具有的独立运动方程式数目或者说是确定体系位置所需的独立 坐标数目。 3、联系:限制运动的装置成为联系(或约束)体系的自由度可因加入的联系而减少,能减少一个自由度的装置成为一个联系 ①一个链杆可以减少一个自由度,成为一个联系。②一个单铰为两个联系。 4、计算自由度:W 3m (2h r ) ,m为刚片数,h为单铰束,r为链杆数。 A 、 W>0, 表明缺少足够联系,结构为几何可变; B、 W=0 ,没有多余联系; C、 W<0, 有多余联系,是否为几何不变仍不确定。 5、几何不变体系的基本组成规则: A、三刚片规则:三个刚片用不在同一直线上的三个单铰两两铰联,组成的体系是几何不变的,而且没有多余联系。 B、二元体规则:在一个刚片上增加一个二元体,仍未几何不变体系,而且没有多余联系。 C、两刚片原则:两个刚片用一个铰和一根不通过此铰的链杆相联,为几何不变体系,而且 没有多余联系。 6、虚铰:连接两个刚片的两根链杆的作用相当于在其交点处的一个单铰。虚铰在无穷远 处的体系分析可见结构力学 P20,自行了解。 7、静定结构的几何构造为特征为几何不变且无多余联系。 三、静定梁与静定钢架 1、内力图绘制: A、内力图通常是用平行于杆轴线方向的坐标表示截面的位置,用垂直于杆轴线的坐标表示 概念题 1.1 结构动力计算与静力计算的主要区别是什么? 答:主要区别表现在:(1) 在动力分析中要计入惯性力,静力分析中无惯性力;(2) 在动力分析中,结构的内力、位移等是时间的函数,静力分析中则是不随时间变化的量;(3) 动力分析方法常与荷载类型有关,而静力分析方法一般与荷载类型无关。 1.2 什么是动力自由度,确定体系动力自由度的目的是什么? 答:确定体系在振动过程中任一时刻体系全部质量位置或变形形态所需要的独立参数的个数,称为体系的动力自由度(质点处的基本位移未知量)。确定动力自由度的目的是:(1) 根据自由度的数目确定所需建立的方程个数(运动方程数=自由度数),自由度不同所用的分析方法也不同;(2) 因为结构的动力响应(动力内力和动位移)与结构的动力特性有密切关系,而动力特性又与质量的可能位置有关。 1.3 结构动力自由度与体系几何分析中的自由度有何区别? 答:二者的区别是:几何组成分析中的自由度是确定刚体系位置所需独立参数的数目,分析的目的是要确定体系能否发生刚体运动。结构动力分析自由度是确定结构上各质量位置所需的独立参数数目,分析的目的是要确定结构振动形状。 1.4 结构的动力特性一般指什么? 答:结构的动力特性是指:频率(周期)、振型和阻尼。动力特性是结构固有的,这是因为它们是由体系的基本参数(质量、刚度) 所确定的、表征结构动力响应特性的量。动力特性不同,在振动中的响应特点亦不同。 1.5 什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼? 答:振动过程的能量耗散称为阻尼。 产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。当然,也包括结构中安装的各种阻尼器、耗能器。阻尼力是根据所假设的阻尼理论作用于质量上用于代替能量耗散的一种假想力。粘滞阻尼理论假定阻尼力与质量的速度成比例。粘滞阻尼理论的优点是便于求解,但其缺点是与往往实际不符,为扬长避短,按能量等效原则将实际的阻尼耗能换算成粘滞阻尼理论的相关参数,这种阻尼假设称为等效粘滞阻尼。 1.6 采用集中质量法、广义位移法(坐标法)和有限元法都可使无限自由度体系简化为有限自由度体系,它们采用的手法有何不同? 答:集中质量法:将结构的分布质量按一定规则集中到结构的某个或某些位置上,认为其他地方没有质量。质量集中后,结构杆件仍具有可变形性质,称为“无重杆”。 广义坐标法:在数学中常采用级数展开法求解微分方程,在结构动力分析中,也可采用相同的方法求解,这就是广义坐标法的理论依据。所假设的形状曲线数目代表在这个理想化形式中所考虑的自由度个数。考虑了质点间均匀分布质量的影响(形状函数),一般来说, 第十章 结构动力计算基础 一、判断题: 1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。 2、仅在恢复力作用下的振动称为自由振动。 3、单自由度体系其它参数不变,只有刚度EI 增大到原来的2倍,则周期比原来的周期减小1/2。 4、结构在动力荷载作用下,其动内力与动位移仅与动力荷载的变化规律有关。 5、图示刚架不计分布质量和直杆轴向变形,图a 刚架的振动自由度为2,图b 刚架的振动自由度也为2。 6、图示组合结构,不计杆件的质量,其动力自由度为5个。 7、忽略直杆的轴向变形,图示结构的动力自由度为4个。 8、由于阻尼的存在,任何振动都不会长期继续下去。 9、设ωω,D 分别为同一体系在不考虑阻尼和考虑阻尼时的自振频率,ω与ωD 的关系为ωω=D 。 二、计算题: 10、图示梁自重不计,求自振频率ω。 l l /4 11、图示梁自重不计,杆件无弯曲变形,弹性支座刚度为k ,求自振频率ω。 l /2 l /2 12、求图示体系的自振频率ω。 l l 0.5l 0.5 13、求图示体系的自振频率ω。EI = 常数。 l l 0.5 14、求图示结构的自振频率ω。 l l 15、求图示体系的自振频率ω。EI =常数,杆长均为l 。 16、求图示体系的自振频率ω。杆长均为l 。 17、求图示结构的自振频率和振型。 l /2 l /2 l / 18、图示梁自重不计,W EI ==?? 2002104kN kN m 2 ,,求自振圆频率ω。 B 2m 2m 19、图示排架重量W 集中于横梁上,横梁EA =∞,求自振周期ω。 EI EI W 第2章 分析动力学基础 2.1 基本概念 2.1.1 约束 对质点系各质点的位移和速度提供的限制,约束在数学上通过约束方程来表达。对于n 个质点组成的系统,约束方程的一般形式为: m k t r r r r r r f n n k ,1,0),,...,,,,...,,(2 121== 或简写为: m k t r r f i i k ,1,0),,(== 式中,i r 、i r 分别为质点i 的位置矢量和速度矢量,t 为时间,m 为约束方程的个数。 注:弹性支座不对位置和速度提供直接限制,不作为约束。 约束方程的分类: (1) 几何约束和运动约束 几何约束:约束方程中不显含速度项,如:0),(=t r f i k 运动约束:约束方程中显含速度项,如:0),,(=t r r f i i k 下图中,如果圆轮与地面之间无滑动,则其约束方程为:0=-? a x c (2) 定常约束和非定常约束 定常约束:约束方程中不显含时间t ,如:0),(=i i k r r f 非定常约束:约束方程中显含时间t ,如:0),,(=t r r f i i k 222l y x =+ 222)(ut l y x -=+ (3) 完整约束与非完整约束 完整约束:几何约束以及可积分的运动约束 非完整约束:不可积分的运动约束 方程0=-? a x c 可积分为0=-?a x c ,因此是完整约束。 (4) 单面约束与双面约束 单面约束:约束方程为不等式,如:0),,(≤t r r f i i k 双面约束:约束方程为等式,如:0),,(=t r r f i i k 下图中,如果考虑到绳子可以缩短,则其约束方程为:222l y x ≤+,表现为不等式形式,就是一个单面约束。 一般分析力学的研究对象为:完整的双面约束,方程为:0),(=t r f i k 。 2.1.2 广义坐标与自由度 广义坐标:描述系统位置状态的独立参数,称为系统 的广义坐标。 广义坐标的个数: (1) 空间质点系:m n N -=3 (2) 平面质点系:m n N -=2 第十章 矩阵位移法 一、判断题: 1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。 2、单元刚度矩阵均具有对称性和奇异性。 3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。 4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。 5、结构刚度方程矩阵形式为:[]{}{}K P ?=,它是整个结构所应满足的变形条件。 6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。 7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。 8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。 9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。 10、矩阵位移法既能计算超静定结构,也能计算静定结构。 11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: (0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0)(1,2,0) (0,0,0)(0,0,3) (1,0,2) (0,0,0) (0,0,0)(1,0,3) (0,0,0) (0,1,2) (0,0,0)(0,3,4) A. B. C. D. 2134123412341234 ( ) 二、计算题: 12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。 12 3l l 4 l 5EI 2EI EA (0,0,0) (0,0,1) (0,2,3) (0,0,0) (0,2,4)(0,0,0) EI 13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。EI ,EA 均为常数。 l ,0) 14、计算图示结构整体刚度矩阵的元素665544,,K K K 。E 为常数。 l l 1 3 4 2A , I A A /222A I , 2A 15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。 [][]k k 1112 [][] k k 2122 [] k = i i i i i 单刚分块形式为 : 16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵 []K 中的元素,,7877K K EA =常数。,cos α=C ,sin α=S ,C C A ?= S S D S C B ?=?=,,各杆EA 相同。 l [] k EA l i = A B A B D B D A B D -i i ---对称 17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。 结构动力学习题 2.1 建立题2.1图所示的三个弹簧-质点体系的运动方程(要求从刚度的基本定义出发确定体系的等效刚度)。 题2.1图 2.2 建立题2.2图所示梁框架结构的运动方程(集中质量位于梁中,框架分布质量和阻尼忽略不计)。 题2.2图 2.3 试建立题2.3图所示体系的运动方程,给出体系的广义质量M、广义刚度K、广义阻尼C和广义荷载P(t),其中位移坐标u(t)定义为 无重刚杆左端点的竖向位移。 题2.3图 2.4 一总质量为m1、长为L的均匀刚性直杆在重力作用下摆动。一 集中质量m2沿杆轴滑动并由一刚度为K2的无质量弹簧与摆轴相连, 见题 2.4图。设体系无摩擦,并考虑大摆角,用图中的广义坐标q1和q2建立体系的运动方程。弹簧k2的自由长度为b。 题2.4图 2.5 如题2.5图所示一质量为m1的质量块可水平运动,其右端与刚度为k的弹簧相连,左端与阻尼系数为c的阻尼器相连。摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置)。 题2.5图 2.6如题2.6图所示一质量为m1的质量块可水平运动,其上部与一无重刚杆相连,无重刚杆与刚度为k2的弹簧及阻尼系数为c2的阻尼器相连,m1右端与刚度为k1的弹簧相连,左端与阻尼系数为c1的阻尼器相连。摆锤m2以长为L的无重刚杆与滑块以铰相连,摆锤只能在图示铅垂面内摆动。建立以广义坐标u和θ表示的体系运动方程(坐标原点取静平衡位置,假定系统作微幅振动,sinθ=tanθ=θ)。计算 结果要求以刚度矩阵,质量矩阵,阻尼矩阵的形式给出。 结构力学(二) 重庆大学土木工程学院建筑力学系结构力学教研室研制 2004年10月 本章主要内容 §11-1概述 §11-2单自由度体系的运动方程 §11-3单自由度体系的自由振动 §11-4单自由度体系在简谐荷载作用下的强迫振动§11-5单自由度体系在任意荷载作用下的强迫振动§11-6两个自由度体系的自由振动 §11-7一般多自由度体系的自由振动 §11-8多自由度体系在简谐荷载作用下的强迫振动§11-9振型分解法 §11-11能量法计算自振频率 第11章结构的动力计算 §11-1 概述 一. 静力荷载和动力荷载 1。静力荷载 荷载的大小?方向和作用位置都不随时间而变化或变化非常缓慢,使结构质量产生的加速度很小,由它引起的惯性力与作用荷载相比可以忽略不计。 2.动力荷载 荷载的大小、方向或作用位置随时间迅速变化的荷载,它使结构质量产生的加速度比较大,因而不能忽略惯性力对结构的影响。动力荷载使结构产生明显的振动,即在某一位置附近来回运动。 BACK 3.动力荷载的分类 (1)简谐荷载 随时间t按正弦函数或余弦函数规律变化的周期函数,称为简谐荷载(图a)。安装在结构上的具有偏心质量的电动机作匀速转动时就产生这样的动力荷载。例如某电动机的偏心质量m以角速度作匀速转动(图b),偏心质量与转动轴之间的距离为r,则由偏心质量m产生的离心力P为 P=ma=mθ2r 上式中a=θ2r,为向心加速度。若以通过转轴的水平线作为x轴,则经过时间t后,偏心质量m转动的角度为θt,此时离心力P的水平分力和竖向分力分别为 P x (t)=Pcos θt=m2rcos θt P y (t)=Psin θt=m2rsin θt 第五章结构力学的方法 1、常用的计算模型与计算方法 (1)常用的计算模型 ①主动荷载模型:当地层较为软弱,或地层相对结构的刚度较小,不足以约束结构茂变形时,可以不考虑围岩对结构的弹性反力,称为主动荷载模型。 ②假定弹性反力模型:先假定弹性反力的作用范围和分布规律、然后再计算,得到结构的内力和变位,验证弹性反力图形分布范围的正确性。 ③计算弹性反力模型:将弹性反力作用范围内围岩对衬砌的连续约束离散为有限个作用在衬砌节点巨的弹性支承,而弹性支承的弹性特性即为所代表地层范围内围岩的弹性特性,根据结构变形计算弹性反力作用范围和大小的计算方法。 (2)与结构形式相适应的计算方法 ①矩形框架结构:多用于浅埋、明挖法施工的地下结构。 关于基底反力的分布规律通常可以有不同假定: a.当底面宽度较小、结构底板相对地层刚度较大时假设底板结构是刚性体,则基底反力的大小和分布即可根据静力平衡条件按直线分布假定求得(参见图5.2.1 ( b )。 b.当底面宽度较大、结构底板相对地层刚度较小时,底板的反力与地基变形的沉降量成正比。若用温克尔局部变形理论,可采用弹性支承法;若用共同变形理论可采用弹性地基上的闭合框架模型进行计算。此时假定地基为半无限弹性体,按弹性理论计算地基反力。 矩形框架结构是超静定结构,其内力解法较多,主要有力法和位移法,并由此法派生了许多方法如混合法、三弯矩法、挠角法。在不考虑线位移的影响时,则力矩分配法较为简便。由于施工方法的可能性与使用需要,矩形框架结构的内部常常设有梁、板和柱,将其分为多层多跨的形式,其内部结构的计算如同地面结构一样,只是要根据其与框架结构的连接方式(支承条件),选择相应的计算图式。 ②装配式衬砌 根据接头的刚度,常常将结构假定为整体结构或是多铰结构。根据结构周围的地层情况,可以采用不同的计算方法。松软含水地层中,隧道衬砌朝地层方向变形时,地层不会产生很大的弹性反力,可按自由变形圆环计算。若以地层的标准贯入度N来评价是否会对结构的变形产生约束作用时,当标准贯入度N>4时可以考虑弹性反力对衬砌结构变形的约束作用。此时可以用假定弹性反力图形或性约束法计算圆环内力。当N<2时,弹性反力几乎等于零,此时可以采用白由变形圆环的计算方法。 接头的刚度对内力有较大影响,但是由于影响因素复杂,与实际往往存在较大差距,采用整体式圆形衬砌训算方法是近似可行的。此外,计算表明,若将接头的位置设于弯矩较小处,接头刚度的变化对结构内力的影响不超过5%。 目前,对于圆形结构较为适用的方法有: a.按整体结构计算。对接头的刚度或计算弯矩进行修正; 结构动力学大作业 班级土木卓越1201班 学号 U201210323 姓名陈祥磊 指导老师叶昆 2014.12.30 结构动力学大作业 ——SDOF 体系在任意荷载作用下的动力响应 一、结构参数 计算结构为右图所示的 1、kg m 3101000?= m N k /1020006?= 2、m m m m N =??????==21 k k k k N λ==??????==21 3、结构参数中5=N ;0.1=λ。 二、确定各阶频率和振型 多自由度体系自由振动时的运动方程为 012121111=+???+++n n y k y k y k y m 022221212=+???+++n n y k y k y k y m ...... 02211=+???+++n nn n n n y k y k y k y m 写成矩阵形式即为 m 1 m 2 m j m N-1m N k N k j k 1 k 2 []{}[]{}{}0=+y K y M 假设此方程的解答为{}{}()αω+=t Y y sin ,带入到运动方程中得到振动方程 [][](){}{}02=-Y M K ω 此方程要有非零解必须满足频率方程[][]02=-M K ω,可解得各阶主频率i ω 再根据 [][](){}(){}02=-i i Y M K ω 可求出结构的主振型。在主振型中,通常将最后一个位移值设定为1,只要在程 序中加入下列语句: MDOF.YMatrix(:,i)=MDOF.YMatrix(:,i)/MDOF.YMatrix(MDOF.ND,i) 运行程序之后得到如下结果: 1、各阶频率i ω和周期i T W1 12.7290261 T1 0.493610843 W2 37.15584832 T2 0.169103535 W3 58.57252468 T3 0.107271888 W4 75.24400343 T4 0.083504133 W5 85.81966052 T5 0.073213822 2、各阶阵型i Y Y1 Y2 Y3 Y4 Y5 0.284629677 -0.830830026 1.30972147 -1.682507066 1.918985947 0.546200349 -1.088155921 0.37278559 1.397877389 -3.22870741 0.763521118 -0.594351144 -1.2036156 0.521108558 3.513337092 0.918985947 0.309721468 -0.7153703 -1.830830026 -2.68250706 1 1 1 1 1 由主振型可以求得广义质量矩阵M 和广义刚度矩阵K ,均为对角矩阵。程序如下所示: MDOF.MGMatrix = zeros(MDOF.ND,MDOF.ND); for i = 1:MDOF.ND MDOF.MGMatrix(i,i)= (transpose(MDOF.YMatrix(:,i)))*MDOF.MMatrix*MDOF.YMatrix(:,i); end结构力学计算题
(完整版)结构动力学历年试题
最新结构力学作业答案
结构力学习题库
结构动力学习题解答(三四章)
结构动力学习题分析
结构动力学复习 新
结构力学主要知识点归纳
结构力学问答题总结
结构的动力计算
(整理)计算结构动力学2
结构力学 矩阵位移法 结构动力学 习题
结构动力学习题
重庆大学结构力学(二)
第五章 结构力学的方法
结构动力学大作业
相关主题
文本预览