基于模糊控制器的粒子群优化算法
- 格式:pdf
- 大小:287.96 KB
- 文档页数:4
LabVIEW中的模糊逻辑控制与智能优化LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种广泛应用于科学研究、工程技术和教育领域的图形化编程环境,其引入了模糊逻辑控制与智能优化的概念,以提高控制系统的性能和可靠性。
一、模糊逻辑控制1. 模糊逻辑概述模糊逻辑是一种用于处理不确定性和模糊性问题的数学工具,与传统的逻辑控制方法相比,模糊逻辑控制能够更好地处理模糊和非精确的输入,从而提高控制系统的适应性和稳定性。
2. 模糊逻辑控制的原理模糊逻辑控制基于模糊规则和模糊推理,通过将模糊集和模糊关系应用于系统输入与输出之间的映射,实现对控制系统的模糊控制。
它采用模糊集合的运算和模糊逻辑规则的推理来处理具有模糊性质的输入和输出。
3. 模糊逻辑控制在LabVIEW中的实现LabVIEW提供了一套完整的模糊逻辑控制工具包,包括模糊逻辑建模、模糊规则设计和模糊推理等功能。
用户可以通过可视化界面,利用LabVIEW提供的模糊逻辑控制工具包进行系统建模、规则设计和控制参数优化,从而实现对控制系统的模糊控制。
二、智能优化1. 智能优化概述智能优化是一种利用智能算法搜索和优化问题解的方法,通过模拟生物进化、群体行为或其他智能机制,不断搜索最优解并优化系统性能。
与传统的优化方法相比,智能优化方法具有适应性强、全局搜索能力好等优点。
2. 智能优化算法LabVIEW中集成了多种智能优化算法,如遗传算法、粒子群算法、蚁群算法等。
用户可以通过LabVIEW提供的工具包选择适合的算法,并利用其在控制系统设计和优化问题中的应用。
三、LabVIEW中的模糊逻辑控制与智能优化的应用案例1. 温度控制系统以温度控制系统为例,通过LabVIEW中的模糊逻辑控制与智能优化方法,可以实现对温度控制过程的精确控制。
用户可以通过模糊逻辑控制建模工具包,对温度控制系统进行建模和规则设计;然后利用智能优化算法,对模糊控制器的参数进行优化,以提高控制系统的性能。
模糊控制技术发展现状及研究热点【模糊控制技术发展现状及研究热点】一、引言模糊控制技术是一种基于模糊逻辑的控制方法,它能够处理不确定性和模糊性的问题,在工业控制、自动化系统、人工智能等领域得到了广泛的应用。
本文旨在介绍模糊控制技术的发展现状以及当前的研究热点。
二、模糊控制技术的发展现状1. 发展历程模糊控制技术起源于上世纪60年代,由日本学者松井秀树首次提出。
随后,美国学者津田一郎对模糊控制进行了深入研究,并提出了模糊控制的基本理论框架。
自此以后,模糊控制技术得到了快速发展,并在工业控制领域得到了广泛应用。
2. 应用领域模糊控制技术在许多领域都有广泛的应用。
其中,工业控制是模糊控制技术的主要应用领域之一。
通过模糊控制技术,可以实现对复杂工业过程的控制和优化。
此外,模糊控制技术还应用于自动驾驶、机器人控制、电力系统控制等领域。
3. 发展趋势随着信息技术的迅速发展,模糊控制技术也在不断创新和进步。
目前,模糊控制技术正朝着以下几个方向发展:(1)深度学习与模糊控制的结合:将深度学习技术与模糊控制相结合,可以提高模糊控制系统的性能和鲁棒性。
(2)模糊控制理论的拓展:研究者们正在不断完善模糊控制理论,以适应更加复杂和多变的控制问题。
(3)模糊控制技术在新领域的应用:随着科技的发展,模糊控制技术将在更多领域得到应用,如医疗、金融等。
三、模糊控制技术的研究热点1. 模糊控制算法优化目前,研究者们正致力于改进模糊控制算法,以提高控制系统的性能。
其中,遗传算法、粒子群算法等优化算法被广泛应用于模糊控制系统的参数优化和规则提取。
2. 模糊控制系统的建模方法模糊控制系统的建模是模糊控制技术研究的重要内容之一。
目前,常用的建模方法包括基于经验的建模方法、基于数据的建模方法以及基于物理模型的建模方法。
研究者们正在探索更加准确和高效的建模方法。
3. 模糊控制技术在自动驾驶领域的应用随着自动驾驶技术的快速发展,模糊控制技术在自动驾驶领域的应用也备受关注。
自动化系统中的智能优化算法及应用自动化系统在现代工业生产中扮演着重要角色,通过自动化技术实现对生产过程的智能管理,提高生产效率和产品质量。
而智能优化算法则是自动化系统中的关键技术,能够通过对系统进行实时分析和优化,使得系统在不断变化的环境下能够自适应和优化。
本文将介绍几种常见的智能优化算法,并讨论其在自动化系统中的应用。
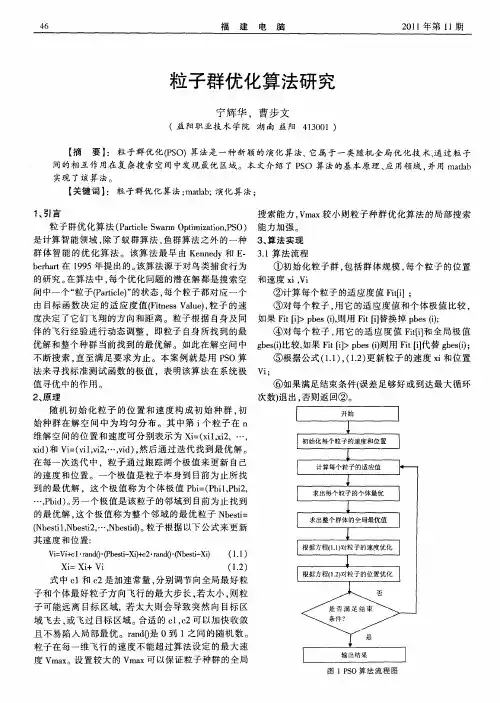
一、遗传算法遗传算法是模拟生物进化过程的一种优化算法,通过模拟自然选择、交叉和变异等操作,通过代际的演化来搜索最优解。
在自动化系统中,遗传算法可以用于优化生产过程的参数配置,例如优化机器人路径规划、优化供应链的调度等。
通过遗传算法,系统可以根据实时数据进行自适应调整,从而提高生产效率和降低成本。
二、神经网络算法神经网络算法是一种模仿生物神经网络的计算模型,通过模拟神经元之间的连接和传递信号来进行信息处理。
在自动化系统中,神经网络算法可以用于模式识别和预测,例如通过分析历史数据来预测产品的需求量,从而优化生产计划。
另外,神经网络算法还可以用于故障检测和智能控制,通过学习和训练的方式提高系统的自适应性。
三、模糊逻辑算法模糊逻辑算法是一种用于处理不确定性和不精确性信息的计算模型,通过建立模糊规则和模糊推理来进行决策和控制。
在自动化系统中,模糊逻辑算法可以用于智能控制和决策支持,例如通过模糊控制器来调节温度、湿度等参数,使系统能够在不确定的环境下保持稳定运行。
此外,模糊逻辑算法还可以用于优化系统的调度和资源分配,提高系统的效率。
四、粒子群优化算法粒子群优化算法是一种模拟鸟群搜索行为的优化算法,通过模拟粒子在多维搜索空间中的移动和信息共享来搜索最优解。
在自动化系统中,粒子群优化算法可以用于参数优化和资源调度,例如通过优化控制器的参数来提高系统的性能,通过优化能源的使用来降低能耗。
通过粒子群优化算法,系统可以自动调整参数和资源的分配,从而实现系统的自适应调节。
总结起来,自动化系统中的智能优化算法有遗传算法、神经网络算法、模糊逻辑算法和粒子群优化算法等。
总第382期计算机与数字工程Vol.49No.8 2021年第8期Computer&Digital Engineering1525基于改进PSO与规则约简的模糊系统优化算法”蔡际杰陈德旺黄允浒黄玮3(1.福州大学数学与计算机科学学院福州350108)(2.福州大学智慧地铁福建省高校重点实验室福州350108)(3.福州理工学院计算与信息科学学院福州350506)摘要模糊系统是一种具有强可解释性和高鲁棒性的智能方法,但目前仍存在精度不高、产生的模糊规则太多等缺陷。
针对目前存在的问题,论文通过改进粒子群优化算法优化模糊系统高斯型隶属度函数的参数,以及计算规则支持度约简模糊规则,提出了CPSFS和SPSFS两种模糊系统优化算法。
在两个不同领域的经典数据集上的研究结果表明:1)CPSFS 算法在训练集和测试集上的预测精度明显优于传统的BP神经网络、RBF神经网络、线性回归等算法;2)CPSFS算法与SPSFS 算法减少了大量模糊规则,保证了模型的可解释性;3)CPSFS算法在约简模糊规则后预测精度依然表现最优,符合新时代下回归问题对于AI技术的要求。
关键词模糊系统;可解释性;鲁棒性;粒子群优化算法;高斯型隶属度函数中图分类号TP391DOI:10.3969/j.issn.1672-9722.2021.08.005Fuzzy System Optimization Algorithm Based on Improved PSO andRule ReductionCAI Jijie1-2CHEN Dewang1-2HUANG Yunhu1-2HUANG Wei3(1.College of Mathematics and Computer Science-Fuzhou University-Fuzhou350108)(2.Key Laboratory of Intelligent Metro of Universities in Fujian Province-Fuzhou University-Fuzhou350108)(3.School of Computing and Information Science,Fuzhou Institute of Technology,Fuzhou350506)Abstract Fuzzy system is a kind of intelligent method with strong interpretability and high robustness,but at present,there are still some defects,such as low precision,too many fuzzy rules and so on.Aiming at the existing problems,this paper proposes two fuzzy system optimization algorithms,which are CPSFS and SPSFS by improving particle swarm optimization algorithm to optimize the parameters of gauss membership function of fuzzy system,and reducing the fuzzy rules by calculating the support degree of rules.The research results on two classical data sets in different fields show that the prediction accuracy of CPSFS algorithm in training set and test set is obviously better than that of traditional BP neural network,RBF neural network and linear regression algorithm.CPSFS algorithm and SPSFS algorithm reduce a lot of fuzzy rules and ensure the interpretability of the model.CPSFS algorithm still has the best prediction accuracy after reducing the fuzzy rules,which meets the requirements of AI technology for regression problems in the new era.Key Words fuzzy system,interpretability,robustness,particle swarm optimization algorithm,gauss membership function Class Number TP3911引言模糊系统(Fuzzy System,FS)在二十世纪90年代初期间发展迅速,尤其是在模糊控制领域的应用效果突出l1]o但是近年来FS的研究并非主流,究其原因主要是因为目前FS的研究还不够成熟l2],主要*收稿日期:2021年1月13日,修回日期:2021年2月24日基金项目:国家自然科学基金面上项目(编号:61976055);智慧地铁福建省高校重点实验室建设基金项目(编号:53001703,50013203)资助。
模糊控制系统的稳定性与鲁棒性设计模糊控制系统是一种基于模糊逻辑原理的控制方法,它能够应对一些复杂、非线性且具有不确定性的系统。
然而,为了确保模糊控制系统的有效性和稳定性,在设计过程中需要考虑其稳定性与鲁棒性。
本文将介绍模糊控制系统的稳定性与鲁棒性设计的相关原理和方法。
一、稳定性分析稳定性是衡量控制系统是否能够始终保持预定状态的重要指标。
对于模糊控制系统而言,稳定性可以通过分析其输出的响应曲线来判断。
一种常用的方法是利用模糊控制系统的输入输出关系进行稳定性分析。
在模糊控制系统中,输入是基于模糊规则的模糊集,输出是经过模糊综合运算得到的模糊集。
通过将输入集合和输出集合表示为隶属函数的形式,可以构建输入输出关系。
稳定性分析可以通过计算系统的稳定方程和判断系统的极点来实现。
稳定方程可以通过线性化系统的非线性部分并进行分析得到。
通过分析系统的极点,可以判断系统的稳定性。
二、鲁棒性设计鲁棒性是指控制系统对于外部扰动、系统参数变化以及测量噪声等干扰的抵抗能力。
在模糊控制系统中,通过设计合适的控制规则和调整模糊集合的形状来提高系统的鲁棒性。
一种常用的方法是通过增加保守规则来提高鲁棒性。
保守规则是一种对于不确定性情况下的应对策略,它可以使系统对于参数变化和噪声的干扰产生抑制作用。
通过引入保守规则,可以使系统在不稳定情况下仍能保持良好的控制性能。
另一种方法是通过优化模糊控制器的参数来提高系统的鲁棒性。
传统的优化方法可以通过最小化误差评价函数来确定最优参数。
然而,在面对不确定性情况时,可以引入鲁棒优化方法来提高系统的鲁棒性。
三、实例分析对于模糊控制系统的稳定性与鲁棒性设计,下面以用于车辆自动驾驶的模糊控制系统为例进行分析。
在车辆自动驾驶系统中,由于道路条件、车辆状态等因素的不确定性,模糊控制系统需要具备较高的稳定性和鲁棒性。
通过对车辆运动模型进行建模,可以得到模糊控制系统的输入输出关系。
在稳定性分析中,可以通过线性化车辆运动模型并分析其稳定方程来判断系统的稳定性。
第38卷第2期______________________________计算机仿真________________________________2021年2月文章编号:1006 -9348(2021 )02 -0220 -05基于改进粒子群算法的倒立摆L Q R优化控制王鹏飞,杜忠华,牛坤,马祥(南京理工大学机械工程学院,江苏南京210094)摘要:在使用LQR线性二次型调节器的直线二级倒立摆中控制器的加权矩阵Q和R的取值经常依靠先验知识选取,为降低 在权矩阵取值上的复杂性,设计了一种引入交叉算子和非线性动态惯性权重的粒子群优化算法,通过引用交叉算子提高粒子群的全局搜索能力,同时在粒子进化的不同阶段调整惯性权重从而更好的平衡全局和局部搜索能力。
直线二级倒立摆的控制仿真结果表明,提出的方法与传统PSO算法优化的方法相比能够提高二级倒立摆平衡控制的稳定性和快速性,具有更优的控制效果。
关键词:粒子群;线性二次型控制器;倒立摆中图分类号:TP27 文献标识码:BL Q R Optimal Control of Inverted Pendulum Based onImproved Particle Swarm Optimization AlgorithmWANG Peng - f e i, Du Zhong - hua, NIU K un, MA Xiang(College of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing Jiangsu210094, China)ABSTRACT :In the problem of linear double inverted pendulum balance control,we usually use the linear quadratic regulator L Q R to solve the optimal state feedback control rate quickly and easily,and i t has good robustness.The values of the weighting matrices Q and R in the L Q R control algorithm often rely on prior knowledge selection.W e introduced a kind of Particle swarm optimization algorithm that contains Crossover Operator and Nonlinear Dynamic Inertia Weight.The algorithm can not only improve the ability of swarms'global searching,but also balance the ability of global and local during the different process of the particles’evolution.The simulation result of the liner double inverted pendulum shows that,the method introduced i n the paper can improve the stability and rapidity of the balance control of the inverted pendulum,and has better control effect,compared with the traditional method of PSO algorithm optimization.KEYWORDS:Particle swarm;Linear quadratic(L Q R)controller,Inverted pendulumi引言倒立摆是典型的多变量、高阶次、非线性的不稳定系统,倒立摆的原理与多旋翼无人机,人形机器人有着相似的特征,可将其推广到更多的具有类似特征的智能控制领域,因此对其研究具有十分重要的理论和实践意义。
基于模糊PID控制器的控制方法研究一、本文概述随着科技的进步和工业的快速发展,控制系统的精确性和稳定性成为了诸多领域,如自动化、机器人技术、航空航天等的关键需求。
PID (比例-积分-微分)控制器作为经典的控制策略,已被广泛应用于各种实际工程问题中。
然而,传统的PID控制器在面对复杂、非线性和不确定性的系统时,其性能往往会受到限制。
因此,寻求一种更加灵活、适应性强的控制方法成为了当前的研究热点。
本文旨在探讨和研究基于模糊PID控制器的控制方法。
模糊PID控制器结合了传统PID控制器的优点和模糊逻辑控制的灵活性,能够在不确定和非线性环境中实现更为精准和稳定的控制。
文章首先将对模糊PID控制器的基本原理进行介绍,包括其结构、特点和工作机制。
然后,通过对比实验和仿真分析,评估模糊PID控制器在不同场景下的控制效果,并探讨其在实际应用中的潜力和挑战。
文章还将讨论模糊PID控制器的参数优化方法,以提高其控制性能和鲁棒性。
本文的研究不仅有助于深入理解模糊PID控制器的控制机理,也为相关领域提供了一种新的控制策略选择,对于推动控制理论的发展和应用具有重要的理论价值和实践意义。
二、模糊PID控制器的基本原理模糊PID控制器是一种结合了模糊逻辑与传统PID控制算法的控制方法。
它旨在通过引入模糊逻辑的优点,改善传统PID控制在处理复杂、非线性系统时的不足。
模糊化过程:将PID控制器的三个主要参数——比例系数(Kp)、积分系数(Ki)和微分系数(Kd)进行模糊化。
这通常涉及到将连续的参数值映射到一组离散的模糊集合上,如“小”“中”和“大”。
模糊推理:在模糊化之后,模糊PID控制器使用模糊逻辑规则对输入误差(e)和误差变化率(ec)进行推理。
这些规则通常基于专家知识和经验,旨在确定如何调整Kp、Ki和Kd以优化系统性能。
解模糊化:经过模糊推理后,得到的输出是模糊的。
为了将这些输出应用于实际的控制系统,需要进行解模糊化过程,即将模糊输出转换为具体的、连续的控制信号。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。