激光三角测距系统
- 格式:doc
- 大小:806.54 KB
- 文档页数:5

测绘技术中的三角测量与交会原理解析测绘技术在现代社会中扮演着重要角色,它不仅应用于地理信息系统、建筑工程、导航系统等领域,也广泛应用于自然资源管理和国家安全。
在测绘技术中,三角测量与交会原理是常用的测量方法之一,它为我们提供了高精度和高可靠性的测量结果。
三角测量是通过测量三角形的边长和角度来计算距离和位置的方法。
这种方法基于几何的基本原理,包括相似三角形的性质和三角函数的关系。
三角测量的关键在于测量准确的角度和边长。
为了实现这一目标,测量人员需要使用精密的测量仪器,并采用精确的操作技术。
在实际测量中,常用的三角测量仪器包括全站仪和电子经纬仪。
全站仪可以同时测量角度和距离,通过内置的计算机可以实时计算和记录测量数据。
电子经纬仪主要用于测量地面控制点的经纬度坐标,它的精度可以达到毫米级。
除了仪器的选择,测量人员还需要注意环境因素,例如大气压力、温度和湿度的变化,这些因素会对测量结果产生一定影响。
三角测量的原理包括两个基本概念:相似三角形和三角函数。
相似三角形指的是具有相同形状但大小不同的三角形。
当两个三角形的对应角度相等时,它们是相似的。
根据相似三角形的性质,我们可以根据已知边长和角度,求解其他未知边长和角度的值。
三角函数是基于直角三角形定义的函数,包括正弦、余弦和正切。
通过测量角度和边长,我们可以利用三角函数来计算未知的距离和位置。
交会原理是三角测量的核心原理之一,它是基于三角形的夹角和边长关系。
交会是指通过测量两个或更多的角度和边长,计算未知点的坐标。
在交会原理中,需要先确定控制点的坐标,并测量与这些控制点之间的角度和边长。
然后,利用三角测量原理,我们可以通过推导和计算确定未知点的坐标。
然而,在实际测绘过程中,存在一些误差和不确定性。
误差可能来自于测量仪器的精度、人为因素的影响以及环境条件的变化。
为了减小误差,测量人员需要进行合理的测量设计、数据处理和质量控制。
此外,为了提高测绘结果的可靠性,常常需要进行多次独立的测量,并进行数据比对和分析。

求实际距离的三种方法当我们需要测量两个点之间的距离时,我们可以使用许多不同的方法。
但是,实际距离的测量需要考虑到许多因素,例如地形、障碍物、海拔高度等。
在本文中,我们将介绍三种测量实际距离的方法,以帮助您选择最适合您需要的测量方法。
第一种方法:三角测量法三角测量法是一种基于三角形原理的测量方法。
这种方法适用于两个点之间没有障碍物的场合。
首先,我们需要在两个点之间建立一个基线,然后在两个点的位置上测量出一个直角三角形的两个角度和一个角度的距离。
根据三角形的原理,我们可以使用三角函数计算出两个点之间的距离。
三角测量法需要使用专业的测量仪器,例如全站仪、经纬仪等。
这些工具可以提供高精度的测量结果,并且可以在不同的地形和环境条件下使用。
但是,这种方法需要专业的技能和经验,因此需要受过专业培训的人员来执行。
第二种方法:激光测距法激光测距法是一种使用激光器测量距离的方法。
这种方法可以测量两个点之间的距离,而且可以在有障碍物的情况下使用。
激光测距法使用激光束发射器从一个点向另一个点发射激光束,然后使用接收器接收反射回来的激光束。
根据激光束的时间和速度,我们可以计算出两个点之间的距离。
激光测距法是一种非常准确的测量方法,可以提供高精度的测量结果。
此外,激光测距器非常小巧轻便,可以携带到不同的地方使用。
但是,激光测距法需要有一个明显的反射面,否则激光束将无法反射回来,无法测量距离。
第三种方法:GPS测距法GPS测距法是一种使用全球定位系统(GPS)测量距离的方法。
这种方法可以测量两个点之间的距离,而且可以在不同的地形和环境条件下使用。
GPS测距法使用GPS接收器接收来自卫星的信号,并使用这些信号计算出两个点之间的距离。
GPS测距法是一种非常方便的测量方法,可以在任何地方使用。
此外,GPS接收器也非常小巧轻便,可以携带到不同的地方使用。
但是,GPS测距法的精度受到许多因素的影响,例如卫星信号的质量、天气条件、地形和建筑物的遮挡等。

测绘技术中的空间测量原理解析引言:在测绘工作中,空间测量是一项极为重要的技术。
它涉及到如何准确地测量物体在三维空间中的位置、形状和大小等信息。
本文将从三个方面对测绘技术中的空间测量原理进行解析,包括三角测量原理、激光测距原理和卫星测绘原理。
一、三角测量原理三角测量是一种通过测量三角形边长和角度来确定未知物体位置的方法。
在空间测量中,通常采用的是多边形三角网平差法。
该方法基于三角形的几何关系和三角函数,通过测量三角形的边长和角度,利用三角函数计算未知点的坐标。
三角测量常用的仪器有经纬仪和全站仪。
例如,在建筑工地上,若要确定某一地点的位置,可以先选取两个已知点,通过在仪器上观测这两个点的方位角和仰角,再观测目标点与已知点之间的夹角和距离。
通过计算,即可求解目标点的坐标。
二、激光测距原理激光测距是利用光的传播速度和测距仪的测量时间来计算距离的一种方法。
它基于光的性质,具有测量快速、精度高的特点。
激光测距通常采用的仪器有激光测距仪和激光雷达。
激光测距仪通过发射激光束,测量激光的发射时间和接收时间,根据光速和时间差求解距离。
激光雷达则通过接收激光束反射回来的信号,根据激光的传播时间和回波强度来计算距离。
激光测距广泛应用于测绘中的地形测量、非接触式三维扫描、建筑物立面测量等领域。
它能够快速、高精度地获取目标物体的坐标和形状信息,为测绘工作提供了强有力的技术支持。
三、卫星测绘原理卫星测绘是利用人造卫星对地球进行遥感观测和测量的技术。
它通过接收卫星传回的遥感图像数据,并结合地面控制点的测量数据,利用几何校正和数学模型计算出地球表面的坐标、高程和形状等信息。
卫星测绘广泛应用于地理信息系统、环境监测、城市规划等领域。
通过卫星遥感技术,可以全面、高效地获取大范围的地理信息,为决策提供准确的空间数据。
结语:测绘技术中的空间测量原理是现代测绘工作中不可或缺的一部分。
通过三角测量、激光测距和卫星测绘等方法,可以准确地测量物体在空间中的位置、形状和大小等信息。
利用光电池进行激光三角法测距张琬祺(20142301038),苏秀崖,王美凤(华南师范大学物理与电信工程学院,广东广州510006)摘要:利用光电池对于不同强度的光转换成不同的电信号的特性以及光反射的原理,进行近距离精密测距实验。
物体的移动导致光反射点的位置的改变,通过光电池接收光的强度确定光反射点的改变位置。
当入射角确定时,光电池的移动距离和物体移动的距离存在一定关系。
关键词:光电池,三角法,近距离精密测距Using photovoltsic cell laser triangulation ranging(Zhang wan-qi Su xiu-ya Wang mei-feng)(1.School of physics and communicationengineering , South China Normal University,Guangzhou 510006, China)Abstract: Using photovoltsic cell for different intensity of light into different characteristics of the electrical signals and the principle of light reflection, precision ranging from close range to experiment on.Moving the position of thelight reflection point of the object changes, through cell receives light intensity determine the change of light reflection point position.When the incident Angle to determine cell moving distance and moving object distance there is a certain relationship.Key words:photovoltaic cell,trigonometry,precision ranging from close range一、引言激光是20世纪以来,继原子能、计算机、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”。

距离测量的不同方法及其适用范围在日常生活和科学研究中,我们经常需要测量距离。
然而,在不同的场景下,测量距离的方法可能有很大的差异,并且适用范围也不尽相同。
本文将介绍几种常见的距离测量方法,并探讨它们的应用。
一、直接测量法直接测量法是最常用的一种距离测量方法。
它通过使用直尺、卷尺、测距仪等工具,直接测量出两点之间的实际距离。
这种方法适用于小范围的距离测量,如家具的尺寸、建筑物的大小等。
二、三角测量法三角测量法是基于几何原理的一种距离测量方法。
它利用三角形的几何关系,通过测量角度和已知边长,计算出未知边长的方法。
这种方法适用于无法直接测量的远距离或难以到达的地点。
例如,在地理测量和山地测量中,三角测量法被广泛应用。
三、雷达测距法雷达测距法是利用电磁波的反射原理来测量距离的一种方法。
它通过发射一束脉冲电磁波,然后接收反射回来的波来计算出目标物体与测距仪之间的距离。
雷达测距法适用于大范围、高精度的距离测量,如航空、导航等领域。
四、激光测距法激光测距法是利用激光束的传播速度和时间的关系来测量距离的一种方法。
它通过发射一束激光光束,然后测量光束从发射到返回所花费的时间,再根据光的速度计算出距离。
激光测距法适用于室内测距、建筑测量、制图等需要高精度的应用。
五、声波测距法声波测距法是利用声波的传播速度和时间的关系来测量距离的一种方法。
它通过发射一系列声波信号,然后测量声波从发射到返回所花费的时间,再根据声速计算出距离。
声波测距法适用于水下测距、深海勘探等领域。
六、卫星定位系统卫星定位系统是一种利用卫星和接收器之间的信号交互来确定位置和距离的方法。
它通过接收来自卫星的定位信息,计算出接收器与卫星之间的距离,并进一步确定位置。
卫星定位系统广泛应用于导航、地理测量等领域。
以上是几种常见的距离测量方法,它们各有优劣,并且适用范围也不同。
在选择合适的距离测量方法时,需要根据具体的需求和实际情况来综合考虑。
最后,需要注意的是,在进行任何距离测量时,都应该遵循相关的测量原则和方法,保证测量的准确性和可靠性。
测绘技术中的地面实测方法近年来,随着科技的不断发展与进步,测绘技术也取得了长足的进步。
地面实测作为测绘技术中的重要环节,对于准确获取地理信息起着关键作用。
本文将就地面实测方法进行探讨。
一、三角测量法:测绘技术中最基础的方法之一三角测量法是一种最基础也最常用的地面实测方法。
它通过测量两个固定的点与一个待测点的夹角,再通过三角函数计算出距离或高度。
这种方法具有测量精度高、适用范围广、操作简便等优点。
以地图绘制为例,通过三角测量法可以测得地图上各地点之间的距离与方位角,进而建立地图的坐标系。
这种方法广泛应用于测绘、导航、地理信息系统等领域。
二、全站仪:高精度地面实测的重要工具随着科技的进步,全站仪作为一种先进的测绘仪器,被广泛应用于地面实测工作中。
全站仪是一种综合了角度测量、距离测量和高度测量等功能于一体的仪器,具有测量精度高、功能强大、操作简便等优点。
在地面实测中,全站仪可以通过测量不同测站上的角度与距离来计算出地面上各点的坐标。
并且,全站仪还可以进行倾角测量和高程测量,从而得到更为准确的地理信息。
三、GPS测量:利用卫星技术实现高精度测量全球定位系统(GPS)是一种基于卫星技术的地面实测方法。
GPS测量通过接收多颗卫星发出的信号,计算出接收站与各卫星之间的距离,进而确定接收站的坐标。
GPS测量具有高度精度、全球覆盖、实时性强等特点。
在地面实测中,GPS测量可以用于测量较大范围的地理信息,如国家边界、山脉、湖泊等。
而且,GPS测量还可以与其他测量方法相结合,提高整体测量的精度与可靠性。
四、激光测距仪:高效快速实现地面距离测量激光测距仪是一种基于激光技术的地面实测方法。
激光测距仪通过发射激光束,然后接收反射回来的闪烁光,并测量激光束往返所用的时间来计算出距离。
激光测距仪具有测量快速、操作简单、结果准确等特点。
在地面实测中,激光测距仪可以用于快速测量建筑物、道路、河流等地面距离。
而且,激光测距仪还可以进行多点测量,从而得到更为详细的地理信息。
四等光电测距三角高程测量技术要求一、概述1.1 背景介绍随着社会科技的不断发展,地理测量技术在国家建设和发展中扮演着重要的角色。
而在地理测量技术中,测距三角高程测量技术是一种常用的测量手段,可以用于地面的高程测量、建筑物的测量和地形地貌的测绘等领域。
1.2 本文意义本文旨在探讨四等光电测距三角高程测量技术的要求,包括技术原理、设备要求、操作规范等方面,以期为相关领域的研究和实践提供指导。
二、技术原理2.1 光电测距原理光电测距是利用光电传感器对物体反射或发射的光信号进行接收和处理,根据信号的时间、幅度等信息来测量物体的距离。
在三角高程测量中,光电测距被应用于测量目标点到测量仪器的距离。
2.2 三角高程测量原理三角高程测量是利用三角形的相似性原理,通过测量不同位置的目标点到测量仪器的距离,结合测量仪器之间的位置关系,来计算目标点的高程。
三、设备要求3.1 测距仪器在四等光电测距三角高程测量中,需要选用精度高、测距范围广的测距仪器,以确保测量的准确性和可靠性。
3.2 观测设备观测设备包括望远镜、测角仪等,需要具备较高的光学分辨率和角度测量精度,同时还需要保证观测设备的稳定性和耐用性。
3.3 数据处理设备在测量过程中,需要使用计算机等设备进行数据处理,以实现对测距数据和角度数据的处理和分析,因此需要配备相应的数据处理软件和硬件设备。
四、操作规范4.1 测量前准备在进行测量之前,需要对测量仪器和设备进行校准和检查,确保其性能和精度良好,同时需要合理选择测量地点和设置测量方向。
4.2 观测过程在进行观测时,需要保证测量仪器和设备的稳定和垂直,并确保观测过程中受到外界干扰的最小化。
4.3 数据处理在收集到测量数据后,需要进行数据处理和分析,在处理过程中需要注意数据的准确性和完整性,并进行误差修正和精度评定。
五、应用范围四等光电测距三角高程测量技术可以被广泛应用于地面高程测量、建筑物测绘、地质勘探等领域,具有较高的测量精度和适用范围。
透镜中心厚度的在线非接触测量系统摘要:透镜中心厚度检测是透镜生产中的一个重要环节,传统的方法是采用接触式测量法,这种检测法精度低、耗时长、容易划伤透镜并且无法实现实时在线测量。
本文设计了一种基于激光三角法测距原理的透镜中心厚度检测系统,该系统是一种新型的非接触测量系统,测量精度高,并且实现了生产线上的实时测量。
论文首先介绍了激光三角法测距的基本原理,其次介绍了透镜中心厚度检测系统的结构组成,系统采用精密的四维调整台和改进的激光三角探头对透镜中心进行精确定位,定位精度可以达到亚微米级,系统用两个性能指标完全一样的激光三角探头进行测量,达到了较好的测量效果,测量范围为0.5~20mm。
最后,论文通过对系统的误差来源进行分析,得出了系统的测量精度,透镜中心厚度检测系统的测量精度≤5 m。
关键词:非接触测量,激光三角法,透镜中心厚度检测Abstract:Lens center thickness detection is an important part in the production of lens, the traditional method is the contact measurement which has a low accuracy, time-consuming, easy to scratch the lens and can not achive real-time and on-line measurement.Based on the principle of laser triangulation rangefinder we designed a lens center thickness detection system in the paper, which is a new non-contact measurement system with high accuracy and a real-time measurement on the lens production. First, the paper introduces the basic principle of the laser triangulation ranging. Second, the paper describes the structure of the lens center thickness detection system, which uses the precision four-dimensional adjustment platform and the improved laser triangulation probes to achieve precision positioning of the lens centre, therefore the positioning accuracy can be reached sub-micron. The system uses two laser triangulation probes with the entirely same technical indicators to measure and achieves a better measurement result. The measurement range reaches 0.5~20mm. Finally, the paper analysis the source of the error, the precision of the lens center thickness detection system reaches≤5mm.Key words: Non-contact measurement, Laser triangulation, Thickness of lens center testing引言透镜是光学系统中最基本的元件,现代光学仪器要求具有非常高的成像质量,这就对透镜的加工质量提出了很高的要求,加工出来的透镜必须严格限制在公差范围内。
激光测距三角系统
1.激光三角法基本原理
在被测物体表面上方,用一束激光以一定的角度照射,激光在物体表面发生反射或者散射,在另一个角度用成像系统对激光反射或散射光进行汇聚成像,被测物体上激光照射所产生的光斑的位置变化,光反射或散射的角度也会变化,用光学系统对光线进行汇聚,光斑成像在CCD或者PSD位置传感器上,沿激光方向当被测物体发生移动时,位置传感器上的成像光斑就会发生移动,其位移对应物体移动距离,从而间接的实现激光测量。
由于入射和反射光构成一个三角形,对光斑位移的计算,几何三角和激光器运用其中,所以这种方法被称为激光三角测量法。
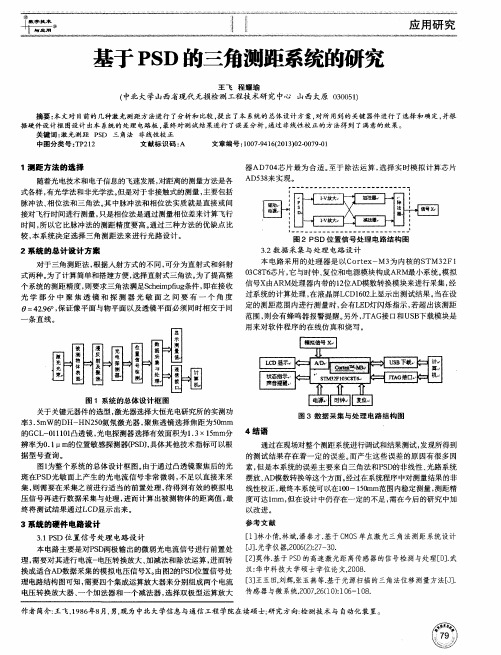
2.系统组成
图1 光学系统结构图
光学器件:AL0650P2尾纤型激光器
A414-光纤准直器
650BP35-OD3T0E02窄带滤光片
DLB-10-25PM的双胶合透镜
系统软硬件设计:
电路部分以AVR单片机为核心的硬件电路,包括线阵CCD驱动电路、CCD信号处理电路,以及以单片机为核心的测量、显示电路,基本满足系统测量精度和在
线检测的要求。
图2 系统硬件框图
软件模块包括单片机对线阵CCD的驱动、信号数据二值化、单片机采集处理和发送程序,控制LCD显示测量结果。
主程序的结构为:
(1)开始,LCD液晶显示屏点亮,初始化单片机和显示器。
(2)等待外部按键的幵始命令。
(3)开始命令发出后,执行CCD驱动程序、脉冲计数填充和采集程序
(4)关闭计数器,控制LCD显示数据。
3.系统CCD
本系统为微位移检测装置,即通过测量被测物体在CCD上成像的像点移动来测量物体的位移,所以选用线阵CCD。
考虑到测量系统应该要满足实时测量要求,并且有较好的动态范围,所以要求系统至少1kHz的响应频率,要求CCD有较好的转移速率,最终选定了 TCD1206SUP。
其驱动波形如下,本系统采用ATmegal6单片机最小系统对CCD进行驱动,另外单片机在小数据处理和LCD控制方面也足以胜任。
图3 TCD1206SUP驱动脉冲波形图
4.信号处理电路
(1)差分放大电路
考虑到CCD的输出信号频率较高(1MHz),所以在对输出信号进行放大处理的时候,要选用通频带较宽的运算放大器,且在本设计中选用的CCD输出信号包含两路输出,需对其进行差分放大处理。
综合考虑以上因素,选择了 AD822放大器。
图4 由AD822组成的差动放大电路
(2)滤波器电路
从放大器输出的信号含有高频成分,需经低通滤波器将高频信号滤掉,另外滤波器所用元件性能好坏影响滤波效果,应该选取精密的电阻器和电容器,这里结合差动放大电路中有AD822运放,所以设计符合要求的有源滤波器,另外,有源滤波器具有一定的信号放大作用和较强的带负载能力。
图5 由AD822组成的一阶有源低通滤波电路图6 由AD822组成的二阶有源低通滤波器(3)二值化处理
二值化处理是把图像包括目标物体、背景还有噪声,从多值的数字图像中分离提取出目标物,在采样精度要求不高的系统里,从运算速度和成本方面考虑,尽可能采用二值化处理信号,本系统采用固定阈值法对信号进行二值化。
基于AVR 单片机内部自带模拟比较器,这样我们省去了外部硬件器件和搭建电路的麻烦。
图7 采用固定國值法的二值化处理电路
(4)光点位置测量(软件)
图8 光点位置测量处理软件流程图
(5)显示接口电路
本系统采用的SMC1602A液晶芯片,与单片机相连,实现显示功能。
5.结束语
本文是阅读了激光三角测距系统相关文献后作出的简单总结,在对激光三角系统理解还有许多不足之处,在以后的学习科研工作中会继续努力。
参考文献
[1] 朱尚明,葛运建.激光三角法测距传感器的设计与实现[J],工业仪表与自动化装置,1998.2
[2] 徐俊峰.激光三角法测距系统[硕士学术论文],长春理工大学,2012.3
[3] 苏煜伟.激光三角法精密测距系统研究[硕士学术论文],西安工业大学,2013.4。