永磁同步电机匝间短路故障在线诊断研究2500字
- 格式:docx
- 大小:13.38 KB
- 文档页数:2
《永磁同步电机鲁棒控制及故障识别研究》篇一一、引言永磁同步电机(PMSM)以其高效率、高功率密度和良好的调速性能在工业领域得到了广泛应用。
然而,为了确保其稳定运行和延长使用寿命,对其控制策略及故障识别技术的深入研究显得尤为重要。
本文将重点探讨永磁同步电机的鲁棒控制及故障识别技术,旨在提高电机的运行效率和可靠性。
二、永磁同步电机鲁棒控制研究1. 鲁棒控制概述鲁棒控制是一种针对系统不确定性和外部干扰的控制系统设计方法。
在永磁同步电机控制中,鲁棒控制能够有效地抑制参数变化和外界干扰对电机性能的影响,提高电机的控制精度和稳定性。
2. 鲁棒控制策略(1)模型预测控制:通过建立电机的数学模型,预测电机未来的行为,从而实现对电机的精确控制。
这种方法能够有效地抑制电机参数变化和外界干扰的影响。
(2)滑模控制:滑模控制是一种非线性控制方法,通过设计滑模面,使系统状态在滑模面上滑动,达到对电机的鲁棒控制。
该方法对电机参数变化和外界干扰具有较强的适应能力。
(3)自适应控制:自适应控制能够根据电机的实际运行状态,自动调整控制器的参数,以适应电机参数的变化和外界干扰。
这种方法能够提高电机的控制精度和稳定性。
三、故障识别技术研究1. 故障识别方法概述故障识别是永磁同步电机运行过程中的重要环节。
通过对电机运行状态的监测和分析,及时发现并诊断电机的故障,对于保障电机的安全运行具有重要意义。
2. 故障识别技术(1)基于电流监测的故障识别:通过监测电机的电流信号,分析电流的波形、幅值等特征,判断电机是否存在故障。
这种方法简单有效,适用于多种故障类型的识别。
(2)基于振动信号的故障识别:通过监测电机的振动信号,分析振动的频率、幅度等特征,判断电机的故障类型和严重程度。
该方法能够有效地识别电机的机械故障。
(3)基于神经网络的故障识别:利用神经网络对电机的运行数据进行学习和分析,实现对电机故障的自动识别和诊断。
该方法具有较高的诊断准确率和较强的适应性。
基于Ansoft的永磁同步电机早期匝间短路故障分析_朱喜华基于Ansoft的永磁同步电机早期匝间短路故障分析朱喜华,李颖晖,张敬,李宁(空军⼯程⼤学⼯程学院,西安 710038)[摘要]针对路的⽅法的不⾜,建⽴了基于Ansoft的永磁同步电动机⼆维瞬态场有限元模型,利⽤Ansoft强⼤的电磁场分析和后处理功能,仿真得到了电机在正常和匝间短路2%、5%故障下的电磁场分布和相关性能曲线,并分析了各种条件下反电势的谐波含量,得出了反电势三次谐波含量随匝间短路程度加剧⽽减少等结论,为永磁同步电机定⼦绕组早期匝间短路故障诊断提供了依据。
[关键词]永磁同步电动机;Ansoft;有限元;匝间短路;故障诊断[中图分类号] TM313 [⽂献标识码]A [⽂章编号]1000-3983(2010)05-0035-05Analysis of Inchoate Interturn Short Circuit Faultfor Permanent Magnet Synchronous Motor Based on Ansoft(Air Force Engineering University Engineering College, Xi’an 710038, China)ZHU Xi-hua, LI Ying-hui, ZHANG Jing, LI NingAbstract: Considering the defect of electric circuit method, This paper establish the two-dimensioninstantaneous finite element model of Permanent Magnet Synchronous Motor (PMSM ) based onAnsoft. The electromagnetic field distribution and relevant performance curves are obtained bysimulation using the powerful electromagnetic field analysis and post process functions of Ansoftwhen PMSM works normally and at 2%、5% interturn short circuit fault of the stator winding. Theharmonic content of back EMF when PMSM works at different conditions are analyzed. Conclusionsare drew such as that the third harmonic of back EMF decrease with the in crease of interturn shortcircuitwhich provide foundation for the diagosis of inchoate stator winding interturn short circuit ofPMSM.Key words: permanent magnet synchronous motor,ansoft,finite element, short circuit, faultdiagnosis引⾔稀⼟永磁同步电机是20世纪70年代初期出现的⼀种新型永磁电机。
浅谈发电机转子绕组匝间短路故障诊断摘要:发电机作为电能生产的主要设备,对整个电力系统的安全稳定运行起着至关重要的作用。
发电机转子绕组匝间短路是一种常见的发电机电气故障,对发电机进行监测,提前发现转子匝间短路故障,可以防止发电机转子一点和两点接地,避免事故的进一步扩大,从而保护发电机设备。
基于此,本文介绍了发电机转子绕组匝间短路故障的研究现状、危害、分类和原因,并探讨了一些常用的诊断方法,仅供参考。
关键词:发电机;转子绕组;匝间短路;故障诊断引言转子绕组匝间短路是发电机的一种常见电气故障。
轻微的匝间短路故障机组仍可继续运行,一旦故障恶化,会导致转子一点甚至两点接地等恶性故障的发生,使得被迫停机检修,造成巨大经济损失。
如果在匝间短路故障发生初期能够及时做出预报,不仅可以避免恶性事故带来的经济损失,还有利于机组安排检修,提高故障处理效率。
因此,发电机转子绕组匝间短路故障的早期检测预报十分必要。
一、发电机转子绕组匝间短路故障的研究现状与危害(一)发电机转子绕组匝间短路故障的研究现状关于发电机转子绕组匝间短路故障的研究,目前主要分为两个方向,即离线和在线,而且提出了很多解决的方法,其中在线监测的方式越来越被学者看重,故目前发电机转子绕组匝间短路故障研究的方向开始偏重在线监测。
(二)发电机转子绕组匝间短路的故障危害若发电机的短路故障无法准确灵敏的检测出来,会给发电机带来巨大的损坏,主要危害可分为两点:第一,由于短路时会在一点产生大量的热,烧坏绝缘层而导致线路接地,若过热点在线棒,还会变形甚至融化。
若这个时候没有处理,故障会进一步恶化,比如由于过热导致护环破坏或者发生主轴承磁化等严重后果,更严重的会将转子损坏;第二,当出现短路问题时,会使绕组温度升高,机组无用功功率输出降低,同时励磁电流产生变大的情况。
若是一个磁极匝间发生短路时,会导致电力系统输出质量降低,烧损轴瓦、轴径,而短路故障会使旋转磁场平衡遭到毁坏,导致发电机磁场平衡,发电机组产生剧烈的震动,导致其他保护部件的损伤。
《永磁同步电机鲁棒控制及故障识别研究》篇一一、引言随着工业自动化和智能化水平的不断提高,永磁同步电机(PMSM)作为高效、节能的电机类型,在各个领域得到了广泛应用。
然而,要实现PMSM的稳定、高效运行,其控制策略和故障识别技术显得尤为重要。
本文将针对永磁同步电机的鲁棒控制及故障识别进行深入研究,旨在提高电机的运行性能和可靠性。
二、永磁同步电机鲁棒控制研究1. 鲁棒控制理论概述鲁棒控制是一种针对系统不确定性和干扰的控制方法,通过优化控制策略,使系统在面对各种干扰时仍能保持稳定。
在永磁同步电机控制中,鲁棒控制可以有效提高电机的动态性能和稳定性。
2. 永磁同步电机鲁棒控制策略(1)基于滑模观测器的鲁棒控制:滑模观测器具有良好的抗干扰性能,可以实现对电机状态的实时观测和反馈。
通过设计合适的滑模面和控制器,可以实现对永磁同步电机的鲁棒控制。
(2)基于模糊控制的鲁棒控制:模糊控制可以处理系统的不确定性和非线性问题,通过建立模糊规则和推理机制,实现对电机的精确控制。
将模糊控制应用于永磁同步电机控制中,可以提高系统的鲁棒性和动态性能。
3. 实验验证与分析通过搭建实验平台,对上述鲁棒控制策略进行验证。
实验结果表明,采用滑模观测器和模糊控制的永磁同步电机控制系统具有较好的动态性能和稳定性,能够有效抑制系统的不确定性和干扰。
三、永磁同步电机故障识别研究1. 故障识别技术概述故障识别是保证电机正常运行的重要手段,通过对电机运行状态的监测和分析,及时发现并处理潜在故障。
在永磁同步电机中,常见的故障包括绕组故障、轴承故障等。
2. 故障特征提取与识别方法(1)基于信号处理的故障特征提取:通过对电机的电流、电压等信号进行处理,提取出与故障相关的特征信息。
常用的方法包括频谱分析、波形分析等。
(2)基于机器学习的故障识别:利用机器学习算法对提取的故障特征进行学习和分类,实现故障的自动识别。
常用的机器学习算法包括神经网络、支持向量机等。

《永磁同步电机鲁棒控制及故障识别研究》篇一一、引言永磁同步电机(PMSM)因高效率、高精度和高稳定性等特点在工业和电动汽车等众多领域得到广泛应用。
然而,对于复杂的工作环境和潜在的故障风险,电机控制系统的稳定性和鲁棒性成为了重要的研究课题。
本文将重点研究永磁同步电机的鲁棒控制及故障识别技术,以提高电机的性能和可靠性。
二、永磁同步电机鲁棒控制研究1. 鲁棒控制理论基础鲁棒控制是一种针对系统不确定性和外部干扰的控制系统设计方法。
在永磁同步电机控制中,鲁棒控制能够提高电机的动态性能和稳定性,降低外界干扰对电机运行的影响。
2. 鲁棒控制器设计针对永磁同步电机的特点,设计合适的鲁棒控制器是关键。
通过引入适当的反馈机制和优化算法,可以提高控制器的抗干扰能力和鲁棒性。
此外,利用现代控制理论,如滑模控制、自适应控制等,可以进一步提高控制器的性能。
3. 仿真与实验验证通过仿真和实验验证,对设计的鲁棒控制器进行性能评估。
通过对比传统控制和鲁棒控制的性能指标,如响应速度、稳态误差等,验证鲁棒控制在永磁同步电机控制中的优越性。
三、永磁同步电机故障识别研究1. 故障类型与识别方法永磁同步电机可能出现的故障包括绕组断路、绕组短路、轴承故障等。
针对这些故障,采用不同的识别方法,如电流分析法、振动分析法、温度检测法等。
这些方法可以有效地检测和识别电机的故障。
2. 故障识别系统设计设计一套完整的故障识别系统,包括传感器、数据处理和分析模块等。
传感器用于实时监测电机的运行状态,数据处理和分析模块则负责分析和识别电机的故障。
通过实时监测和故障识别,可以及时发现并处理潜在的故障,提高电机的运行可靠性和安全性。
3. 故障诊断与处理策略针对不同的故障类型,制定相应的诊断与处理策略。
通过实时监测电机的运行状态和故障信息,及时诊断出故障类型和原因,并采取相应的处理措施,如报警、停机等,以避免故障进一步扩大,保证电机的正常运行。
四、结论本文对永磁同步电机的鲁棒控制和故障识别技术进行了深入研究。
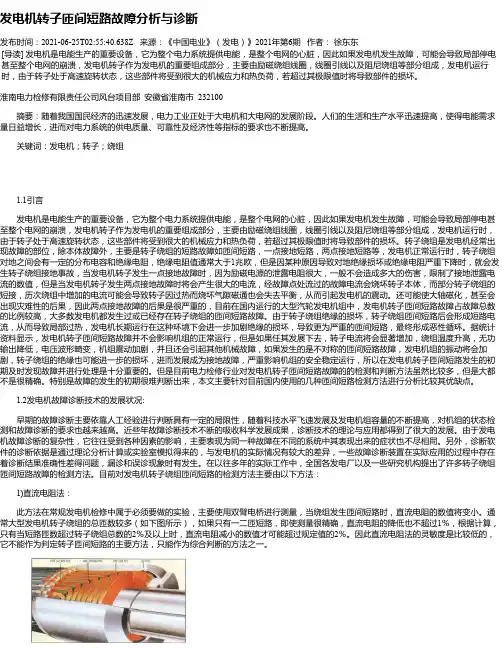
发电机转子匝间短路故障分析与诊断发布时间:2021-06-25T02:55:40.638Z 来源:《中国电业》(发电)》2021年第6期作者:徐东东[导读] 发电机是电能生产的重要设备,它为整个电力系统提供电能,是整个电网的心脏,因此如果发电机发生故障,可能会导致局部停电甚至整个电网的崩溃,发电机转子作为发电机的重要组成部分,主要由励磁绕组线圈,线圈引线以及阻尼绕组等部分组成,发电机运行时,由于转子处于高速旋转状态,这些部件将受到很大的机械应力和热负荷,若超过其极限值时将导致部件的损坏。
淮南电力检修有限责任公司风台项目部安徽省淮南市 232100摘要:随着我国国民经济的迅速发展,电力工业正处于大电机和大电网的发展阶段。
人们的生活和生产水平迅速提高,使得电能需求量日益增长,进而对电力系统的供电质量、可靠性及经济性等指标的要求也不断提高。
关键词:发电机;转子;绕组1.1引言发电机是电能生产的重要设备,它为整个电力系统提供电能,是整个电网的心脏,因此如果发电机发生故障,可能会导致局部停电甚至整个电网的崩溃,发电机转子作为发电机的重要组成部分,主要由励磁绕组线圈,线圈引线以及阻尼绕组等部分组成,发电机运行时,由于转子处于高速旋转状态,这些部件将受到很大的机械应力和热负荷,若超过其极限值时将导致部件的损坏。
转子绕组是发电机经常出现故障的部位,除本体故障外,主要是转子绕组的短路故障如匝间短路,一点接地短路,两点接地短路等,发电机正常运行时,转子绕组对地之间会有一定的分布电容和绝缘电阻,绝缘电阻值通常大于1兆欧,但是因某种原因导致对地绝缘损坏或绝缘电阻严重下降时,就会发生转子绕组接地事故,当发电机转子发生一点接地故障时,因为励磁电源的泄露电阻很大,一般不会造成多大的伤害,限制了接地泄露电流的数值,但是当发电机转子发生两点接地故障时将会产生很大的电流,经故障点处流过的故障电流会烧坏转子本体,而部分转子绕组的短接,历次绕组中增加的电流可能会导致转子因过热而烧坏气隙磁通也会失去平衡,从而引起发电机的震动。
车用永磁同步电机动态故障检测与诊断策略研究摘要:车用永磁同步电机是新能源汽车中常用的电机类型,且其动态性能受到车载电池状态和驾驶行为等复杂因素的影响。
因此,动态故障检测与诊断对于保障电机安全运行和提高整车可靠性意义重大。
本文通过对车用永磁同步电机典型故障特征和机理进行分析,提出了基于Vold-Kalman滤波的电机状态估计方法、基于典型故障特征的故障识别方法以及基于灰度关联度的故障程度评估方法。
实验结果表明,所提出的方法能够有效检测和诊断车用永磁同步电机的故障。
关键词:车用永磁同步电机;动态故障检测;诊断策略;Vold-Kalman滤波;灰度关联度1.引言随着新能源汽车的快速发展,车用永磁同步电机作为主要动力源受到越来越广泛的关注。
在实际应用中,由于车载电池状态、驾驶行为和工作环境等复杂因素的影响,车用永磁同步电机容易发生故障,导致电机性能下降甚至停机。
因此,对车用永磁同步电机的动态故障检测和诊断具有重要的现实意义。
2.车用永磁同步电机故障特征分析车用永磁同步电机的故障表现为机械故障和电气故障两类。
机械故障包括轴承磨损、定子绕组断线、转子断裂等;电气故障包括相间短路、转子断路、定子与转子短路等。
为了更好地理解和刻画车用永磁同步电机故障特征,本文重点分析了若干典型故障的时域、频域和时频分析特征,并分析了故障产生的机理。
3.车用永磁同步电机动态故障检测与诊断策略本文基于车用永磁同步电机典型故障特征和机理,提出了三种动态故障检测与诊断策略,分别是基于Vold-Kalman滤波的电机状态估计方法、基于典型故障特征的故障识别方法以及基于灰度关联度的故障程度评估方法。
3.1 基于Vold-Kalman滤波的电机状态估计方法使用Vold-Kalman滤波器,可以准确估计车用永磁同步电机的相电流和相电压等状态量,进而刻画电机的正常工作状态和故障状态,并进一步判定电机是否存在故障。
3.2 基于典型故障特征的故障识别方法本文通过对车用永磁同步电机典型故障的时域、频域和时频分析特征进行分析,提取了故障识别的特征向量,并进行支持向量机(SVM)分类器的训练,以实现车用永磁同步电机的故障识别。
发电电动机励磁绕组匝间短路故障在线监测分析摘要:发电电动机在投入使用的过程中难免会发生一些故障,常见的故障就包括励磁绕组匝间短路,一旦出现这种故障就会导致转子励磁的输出无功减小,导致电流增加,这些不良后果的出现如果没有得到及时的处理就会引发一些安全事故。
所以通过结合发电电动机在运行过程中容易出现的一些故障,并对故障进行实时的监测,尽早的发现可能存在的一些故障十分重要。
这篇文章通过分析中性点电流互感器对励磁绕组匝间短路故障的反映情况,总结了基于中性点不平衡电流的发电电动机励磁绕组匝间短路故障在线监测通用方案,阐述了改进的发电电动机在线监测灵敏方案。
关键词:发电电动机;励磁绕组匝间短路;故障;在线监测;分析引言随着我国经济以及科技的不断发展,我国人民的生活水平也在不断的得到提高,对于电力的需求量不断增加,巨大的电力需求量促进我国电力行业有了更大的发展,现代社会中使用的电能为交流电能,这种电能是由同步发电机产生的,并且最基本的生产电能的设备就是同步发电机,为保障人们能够更加安全的用电,就要充分保障同步发电机以及电力系统的安全运行。
而在同步发电机使用的过程中难免会发生一些故障,其中励磁绕组匝间短路是最为常见的故障,这一故障的存在会严重影响整个电力系统的安全与稳定,因此,对同步发电机进行保护以及故障监测十分重要。
一、研究背景我国电力工程在不断的发展变化,从传统的水轮发电机到现在的抽水蓄能电站,抽水蓄能电站的安全以及稳定受到更多人的关注,由于其具有一定的复杂性,并且其运行环境比较恶劣,再加上使用年限在不断的增加,就会增加故障发生的概率,例如励磁绕组匝间短路这一故障[1]。
轻微的励磁绕组匝间短路不会严重影响同步发电机的正常运行,但是如果长此以往就会增加短路的匝数,进而导致故障进一步加深。
另外励磁绕组匝间短路点的温度还会升高,会导致转子铁芯受到破坏。
由此可见,励磁绕组匝间短路会带来多方面的影响,通过对电机运行过程中可能存在的故障进行监控,能够及时的发现正在处于萌芽期的故障,对这些故障进行及时的检修,避免更多故障的出现,确保电力系统的安全运行。
迫机>易校镂丿应用2020,47(12)故障诊断与保护EMCA线间补偿型匝间短路故障自动容错永磁同步电机故障位置检测方法**景少勇,王旭平,白崟儒,李渊(太原理工大学电气与动力工程学院,山西太原030024)摘要:定子绕组匝间短路故障是永磁同步电机(PMSM)最常见的故障之一。
该故障会造成三相电流不平衡,输出转矩剧烈波动,输出能力下降。
故障严重时,过大的短路电流会烧毁绕组。
为了解决匝间短路故障产生的问题,课题组此前提出了一种具有匝间短路故障自动容错能力的PMSM。
针对该特种电机,提出了一种匝间短路故障位置的检测方法。
介绍了电机的特殊结构,并通过数学模型推导出利用电机漏磁路特性和原有定子线圈判别故障线圈所在相的方法。
使用ANSYS软件建立电机有限元模型,对电机不同匝间短路情况进行仿真,验证了该检测方法的正确性。
关键词:永磁同步电机;匝间短路故障;短路电流抑制;故障位置检测中图分类号:TM351文献标志码:A 文章编号:1673-6540(2020)12-0087-05doi:10.12177/emca.2020.161Fault Location Detection Method for Inter-Line Compensation Permanent Magnet Synchronous Motor with Automatic Inter-Turn ShortCircuit Fault Tolerance*JING Shaoyong,WANG Xuping,BAI Yinru,LI Yuan(College of Electrical and Power Engineering,Taiyuan University of Technology,Taiyuan030024,China)Abstract:The stator winding inter-tum short circuit fault is one of the most common faults of permanent magnet synchronous motor(PMSM).This fault will cause imbalanced three-phase currents,leading to violent fluctuation of output torque and decreasing the output capacity.When the fault is serious,excessive short-circuit current will bum the winding.In order to solve the above problems caused by inter-tum short circuit faults,a PMSM with automatic inter-tum short circuit fault tolerance has been proposed.A detection method for inter-tum short circuit fault location is proposed for this special motor.The special structure of the motor is introduced,and then the method of judging the phase of the fault coil by the characteristics of the magnetic leakage circuit and the original stator coil is deduced through the mathematical model.Finally,the finite element model of the motor is established by ANSYS software, and the simulation of different inter-tum short circuit cases of the motor verifies the correctness of the detection method.Key words:permanent magnet synchronous motor(PMSM);inter-turn short circuit fault;short circuit current suppression;fault location detection收稿日期:2020-09-16;收到修改稿日期:2020-10-16*基金项目:国家自然科学基金项目(51477110);中国博士后科学基金项目(2018M640250);山西省应用基础研究项目面上青年基金项目(201701D221145)作者简介:景少勇(1996-),男,硕士研究生,研究方向为特种电机理论与控制技术。
第27卷㊀第3期2023年3月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electric㊀Machines㊀and㊀Control㊀Vol 27No 3Mar.2023㊀㊀㊀㊀㊀㊀永磁同步电机匝间短路故障短路线圈定位方法陈昊1ꎬ㊀张楠2ꎬ㊀高彩霞2ꎬ㊀桑晓晨3ꎬ㊀许孝卓2ꎬ㊀封海潮2(1.河南理工大学应急管理学院ꎬ河南焦作454003ꎻ2.河南理工大学电气工程与自动化学院ꎬ河南焦作454003ꎻ3.西南交通大学利兹学院ꎬ四川成都610097)摘㊀要:为了研究基于电机外部电信号的直驱永磁同步电机早期匝间短路故障检测及定位方法ꎬ提出一种基于探测线圈阵列的DDPMSM的ISF短路线圈定位方法ꎮ首先ꎬ提出一种基于电机绕组分布及连接方式的探测线圈阵列ꎻ其次ꎬ分析了探测线圈工作机理ꎬ建立了考虑短路线圈位置的探测线圈反电势矩阵ꎻ然后ꎬ利用所建立的探测线圈反电势矩阵ꎬ分析用于ISF短路线圈位置的故障特征量ꎮ提出了利用探测线圈反电势差值进行ISF故障检测和故障线圈组的定位ꎬ利用探测线圈反电势残差进行短路线圈的定位ꎬ提出基于上述定位特征量的ISF定位方法ꎮ仿真和实验结果验证了所提出方法的正确性和有效性ꎮ最后ꎬ以样机为例ꎬ将所提出的定位方法与现有故障定位方法进行比较ꎬ进一步证明方法的准确性和灵敏性ꎮ关键词:直驱永磁同步电机ꎻ匝间短路故障ꎻ故障定位ꎻ探测线圈阵列ꎻ数学模型ꎻ反电势差值ꎻ反电势残差DOI:10.15938/j.emc.2023.03.012中图分类号:TM351文献标志码:A文章编号:1007-449X(2023)03-0124-11㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2021-12-02基金项目:国家自然科学基金(52177039)ꎻ河南理工大学博士基金(B2021-22ꎬB2018-48)ꎻ河南省科技攻关项目(222102220017)作者简介:陈㊀昊(1979 )ꎬ男ꎬ博士ꎬ副教授ꎬ研究方向为机电一体化技术ꎻ张㊀楠(1996 )ꎬ男ꎬ硕士ꎬ研究方向为电机故障诊断ꎻ高彩霞(1981 )ꎬ女ꎬ博士ꎬ教授ꎬ研究方向为电机状态监测与故障诊断㊁特种电机理论及控制等ꎻ桑晓晨(2002 )ꎬ女ꎬ本科ꎬ研究方向为信号处理ꎻ许孝卓(1981 )ꎬ男ꎬ博士ꎬ副教授ꎬ研究方向为特种电机理论与控制ꎻ封海潮(1983 )ꎬ男ꎬ博士研究生ꎬ副教授ꎬ研究方向为特种电机及其控制ꎮ通信作者:高彩霞FaultcoillocationapproachofpermanentmagnetsynchronousmotorwithinterturnshortcircuitfaultCHENHao1ꎬ㊀ZHANGNan2ꎬ㊀GAOCai ̄xia2ꎬ㊀SANGXiao ̄chen3ꎬ㊀XUXiao ̄zhuo2ꎬ㊀FENGHai ̄chao2(1.SchoolofEmergencyManagementꎬHenanPolytechnicUniversityꎬJiaozuo454003ꎬChinaꎻ2.SchoolofElectricalEngineeringandAutomationꎬHenanPolytechnicUniversityꎬJiaozuo454003ꎬChinaꎻ3.LeedsCollegeꎬSouthwestJiaotongUniversityꎬChengdu610097ꎬChina)Abstract:Inordertodetectandlocatetheinter ̄turnshort ̄circuitfault(ISF)ofdirect ̄drivepermanentmagnetsynchronousmotor(DDPMSM)usingexternalelectricalsignalꎬafaultcoillocationapproachwasproposedforDDPMSMwithISFbasedonthenovelsearchcoil.Firstlyꎬthearrangementprincipleofthenovelsearchcoilwaspresentedꎬwhichdependsonthewindingdistributionandconnection.Secondlyꎬtheworkingmechanismofthesearchcoilwasanalyzedꎬthematrixofthebackelectromotiveforce(EMF)ofthenovelsearchcoilwasestablishedconsideringtheshort ̄circuitcoilposition.Thirdlyꎬthesearchcoildifferentialback ̄EMFandsearchcoilresidualbackEMFasfaultlocationindicatorswerepro ̄posedthroughthedevelopedmatrixꎬtheISFlocationapproachwasproposed.Simulationandexperimen ̄talresultsverifyeffectivenessandcorrectnessoftheproposedmethod.FinallyꎬacomparativeanalysisoftheexistingfaultlocationmethodshowsthattheproposedmethodismoresensitiveandaccuratetodetectandlocatetheISFintheearlystage.Keywords:direct ̄drivepermanentmagnetsynchronousmotorꎻinter ̄turnshort ̄circuitfaultꎻfaultloca ̄tionꎻthenovelsearchcoilꎻmathematicalmodelꎻdifferentialback ̄EMFꎻresidualback ̄EMF0㊀引㊀言直驱永磁同步电动机(driect ̄drivepermanentmagnetsynchronousmotorꎬDDPMSM)因其高转矩/惯量比㊁高效率㊁结构紧凑等优点ꎬ被广泛应用于高端制造装备㊁电动汽车㊁航空航天㊁国防军工等领域[1]ꎮ在电动汽车[2]和工业机器人[3]等大功率应用中ꎬ多支路并联永磁同步电机(DDPMSMwithmultiplebranchesparallelwindingꎬMB ̄DDPMSM)得到了广泛的应用ꎮ然而ꎬMB ̄DDPMSM在长期的运行中受热应力㊁电应力㊁机械应力等因素影响ꎬ定子绕组易发生匝间短路故障(interturnshort ̄circuitfaultꎬISF)[4]ꎮ如果早期ISF未被发现并采取相应措施ꎬ故障会迅速发展成更严重的短路故障ꎬ甚至可能引发重大安全事故[5]ꎮ及时检测出早期ISF并采取有效措施能够有效防止故障恶化ꎬ预防灾难性故障发生ꎮ若能进一步诊断出短路线圈的位置ꎬ不仅能为故障后的运行策略和容错策略制定提供重要信息ꎬ还能极大的减少MB ̄DDPMSM的维修时间和成本[6]ꎮ因此ꎬ开展早期ISF的检测与定位研究具有重要的理论研究价值与工程应用价值ꎮ匝间短路故障会使故障位置处磁通减小ꎬ改变磁场分布ꎬ导致磁通密度发生畸变ꎮ因此ꎬ磁通信号包含了诊断匝间短路故障的重要信息ꎮ为了实现短路线圈的定位ꎬ国内外学者提出了基于磁信号的ISF诊断方法ꎮ精准检测故障位置处的磁信号是该类方法的关键ꎮ探测线圈因其易安装㊁精度高等优点常用于测量磁通ꎮ文献[7-8]在电机外壳上安装探测线圈检测定子轭外部的漏磁场ꎬ利用漏磁场实现了ISF的检测与定位ꎮ该方法虽然可以定位ISF故障位置ꎬ但其测量精度易受外部电磁信号影响ꎮ同时由于漏磁通信号较弱ꎬ因此在诊断早期ISF故障时精度较低ꎮ为了提高早期故障诊断的灵敏性与准确性ꎬ有学者提出通过检测定子齿磁通的变化ꎬ来检测ISF及识别故障位置ꎮ文献[9-15]在每个定子齿上安装探测线圈来测量定子齿中磁通ꎮ文献[9-10]利用定子齿磁通中的高次谐波实现了ISF定位ꎮ电机运行时ꎬ探测线圈上的感应电势可反映对应的定子齿磁通ꎮ文献[11-13]通过傅里叶变换分析了探测线圈感应电势ꎬ利用感应电势的基波与三次谐波分量实现了ISF检测与定位ꎮ上述这些ISF定位方法由于采用FFT等谐波分析方法ꎬ导致定位算法计算量比较大ꎮ文献[14-15]提取了故障前后每个定子齿上的探测线圈反电势幅值ꎬ并绘制相应的雷达图ꎮ通过在比较故障前后雷达图的变化来确定ISF位置ꎮ该定位方法不需要任何先进的信号分析方法ꎬ降低了故障定位算法的复杂性ꎮ然而上述方法需要在每个定子齿上安装探测线圈ꎬ对电机的侵入性较大ꎮ为了减小故障诊断方法的侵入性与复杂性ꎬ提出了一种基于探测线圈阵列的ISF定位方法ꎮ首先ꎬ提出了一种探测线圈阵列ꎮ根据电机绕组分布及连接方式ꎬ阵列中的探测线圈仅需安装在一些特定的定子齿上ꎬ极大减少了探测线圈数量ꎮ其次ꎬ建立了ISF下的探测线圈反电势与短路线圈位置的映射关系ꎬ并利用样机的有限元模型验证了所建立反电势矩阵的正确性ꎮ接着ꎬ通过建立反电势矩阵分析故障线圈组定位特征量和短路线圈定位特征量ꎬ并通过仿真与实验证明所提出故障特征量的正确性与有效性ꎮ最后ꎬ将所提出的定位方法与Zeng的方法在不同ISF程度下进行比较ꎬ结果进一步证明了早期匝间短路故障下本文所提出的ISF故障定位方法的准确性与灵敏性ꎮ1㊀探测线圈阵列探测线圈阵列中包括电机中所有位于不同定子齿上的探测线圈ꎮ阵列中探测线圈的布置与线圈组(将同一相彼此相邻的串联的定子线圈定义为线圈组)中线圈个数有关ꎮ当线圈组中有3个线圈时(a型线圈组)ꎬ将探测线圈安装在线圈组的第二个线圈所在的定子齿上ꎬ如图1(a)所示ꎬ这种探测线圈布置方式定义为Type-I型ꎻ当线圈组中有2个线圈时(b型线圈组)ꎬ将探测线圈安装在线圈组中任意一个线圈所在定子齿上ꎬ如图1(b)所示ꎬ这种探521第3期陈㊀昊等:永磁同步电机匝间短路故障短路线圈定位方法测线圈布置方式定义为Type-II型ꎮ上述两种类型被称为探测线圈基本安装单元ꎬ其探测线圈分别称为Type-I型探测线圈与Type-II型探测线圈ꎮ图1㊀探测线圈基本安装单元示意图Fig.1㊀BasicinstallationunitofSC当线圈组的线圈个数大于3时ꎬ线圈组可看作若干个a型与b型线圈组串联构成ꎬ其探测线圈的布置由基本安装单元组合而成ꎮType-I型和Type-II型探测线圈安装数量可由下式初步确定:Ncoil=3NT-I+2NT-IIꎬ(NT-IꎬNT-II=1ꎬ2ꎬ3ꎬ )ꎮ(1)式中Ncoil㊁NT-I㊁NT-II分别代表了线圈组中的定子线圈个数㊁Type-I型探测线圈安装数量和Type-II型探测线圈安装数量ꎮ(NT-IꎬNT-II)被称为探测线圈的配置组合ꎮ通常情况下ꎬ(NT-IꎬNT-II)不唯一ꎮ为了尽可能减小对电机侵入性ꎬ选取探测线圈安装数量最少的组合(NT-IꎬNT-II)ꎮ例如ꎬ当线圈组中有6个线圈时ꎬ满足式(1)的组合有两种ꎬ分别为(2ꎬ0)和(0ꎬ3)ꎮ对比两种配置组合所需探测线圈的数量ꎬ(2ꎬ0)比(0ꎬ3)少一个ꎬ因此选(2ꎬ0)作为该线圈组中探测线圈的配置组合ꎮ综上ꎬ探测线圈配置组合的确定方法为:1)确定满足式(1)的所有配置组合ꎻ2)从中选取所需探测线圈数量最少的一种组合ꎮ在确定探测线圈配置组合后ꎬ需要将探测线圈布置在电机中ꎮ对于一台M(M=3ꎬ6ꎬ9ꎬ )相ꎬ每相n条支路ꎬ每条支路m个线圈的DDPMSMꎬ其X(X=AꎬBꎬCꎬ )相探测线圈布置示意图如图2所示ꎮ图2中:Xij为X(X=AꎬBꎬCꎬ ꎬM)相第i(i=1ꎬ2ꎬ ꎬn)条支路ꎬ编号为j(j=1ꎬ2ꎬ ꎬm)的定子线圈ꎬTXij为Xij所在的定子齿ꎬSCXij为装在TXij上探测线圈ꎮ图2㊀X相探测线圈布置示意图Fig.2㊀SClayoutinXphase根据Type-I型和Type-II型的不同组合方式ꎬ探测线圈的安装有3种情况:1)仅安装Type-I型探测线圈(即NT-I>0ꎬNT-II=0)ꎻ2)仅安装Type-II型探测线圈(即NT-I=0ꎬNT-II>0)ꎻ3)同时安装Type-I型和Type-II型探测线圈(即NT-I>0ꎬNT-II>0)ꎮ表1列出了X相第i条支路3种探测线圈配置组合的探测线圈安装位置ꎮ表1㊀3种探测线圈配置组合的探测线圈安装位置Table1㊀SCpositionforthreeconfigurationcombination定子齿探测线圈位置NT-I>0ꎬNT-II=0(组合I)NT-I=0ꎬNT-II>0(组合II)NT-I>0ꎬNT-II>0(组合III)TXi1ɿɿTXi2ɿTXi3ɿTXi4ɿTXi5ɿɿ⋮⋮⋮⋮TXijɿɿTXi(j+1)ɿTXi(j+2)ɿTXi(j+3)ɿTXi(j+4)ɿɿ⋮⋮⋮⋮从表1可以看出:1)当NT-I>0ꎬNT-II=0时ꎬ电机中仅安装Type-I型ꎬ这些探测线圈分别绕制在TXi2ꎬTXi5ꎬ ꎬTXi(j+1)ꎬTXi(j+4)ꎬ ꎻ2)当NT-I=0ꎬNT-II>0时ꎬ电机中仅安装Type-II型ꎬ这些探测线圈分别绕制在TXi1ꎬTXi3ꎬTXi5ꎬ ꎬTXijꎬTXi(j+2)ꎬTXi(j+4)ꎬ ꎻ3)当NT-I>0ꎬNT-II>0时ꎬ电机中同时安装Type-I和Type-II型ꎬ这两种探测线圈交替绕621电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀制在定子齿上ꎬ探测线圈分别缠绕在TXi1ꎬTXi4ꎬ ꎬTXijꎬTXi(j+3)ꎬ ꎮ至此ꎬ通过上述步骤得到了线圈组中的线圈个数大于3时探测线圈的布置方式ꎮ综上ꎬ探测线圈阵列中探测线圈的布置原则为:1)确定满足式(1)的所有配置组合ꎻ2)从中选取所需探测线圈数量最少的一种组合ꎻ3)根据确定的(NT-IꎬNT-II)中两种基本单元的组合方式ꎬ参照表1确定探测线圈安装位置ꎮ采用探测线圈阵列仅需要在一些特定的定子齿上安装探测线圈ꎬ简化了电机中探测线圈的安装数量ꎮ2㊀探测线圈工作机理分析当电机工作在健康状态时ꎬ根据电磁感应定律可知ꎬ探测线圈反电势为eSC(Xij)-H=-Nscdφdtꎮ(2)式中:eSC(Xij)-H是健康状态下SCXij中的反电动势ꎻNsc是探测线圈的匝数ꎻφ是探测线圈所在的定子齿磁通ꎮ电机正常运行时ꎬφ由旋转磁场产生ꎬ因此不同位置的探测线圈反电势幅值相同ꎮ当电机发生匝间短路故障时ꎬ故障相各支路不对称ꎬ导致支路中产生环流ꎬ环流流过定子线圈会产生与探测线圈相交链的磁通ꎮ另外ꎬ故障线圈的短路部分与短路电阻形成闭合回路ꎬ在短路部分中产生短路电流ꎬ该电流也会产生与探测线圈相交链的磁通ꎮ故匝间短路时探测线圈中的磁通可以分为以下4个部分:1)旋转磁场产生的磁通ꎻ2)故障线圈的短路部分流过短路电流产生的磁通ꎻ3)故障线圈的健康部分流过环流产生的磁通ꎻ4)健康线圈流过环流产生的磁通ꎮ早期匝间短路十分微弱ꎬ对旋转磁场影响非常小ꎬ因此可以近似认为匝间短路故障前后的旋转磁场不变ꎮ由于MB ̄DDPMSM绕组采用集中分数槽结构ꎬ线圈间的互感很小ꎬ因此只需分析与探测线圈相邻的线圈在其中产生的磁通ꎮ根据上述分析ꎬ空间不同位置的探测线圈反电势可以分为以下5种情况:1)故障齿(短路线圈所在的定子齿)上的探测线圈反电势由上述四部分磁通产生ꎻ2)与故障齿相邻的定子齿上的探测线圈反电势由上述四部分磁通产生ꎻ3)故障支路(短路线圈所在的支路)中的其余定子齿上的探测线圈反电势由1)和4)两部分磁通产生ꎻ4)故障相(短路线圈所在相)健康支路中定子齿上的探测线圈反电势由1)和4)两部分磁通产生ꎻ5)健康相的定子齿上的探测线圈反电势由1)产生ꎮ综合以上分析ꎬ当Xij发生匝间短路故障时ꎬ空间不同位置处的探测线圈反电势矩阵为eSC(Xij)eSC(Xi(j+1))eSC(Xijᶄ)eSC(Xiᶄj)eSC(Xᶄij)éëêêêêêêêùûúúúúúúú=eSC(Xij)-HeSC(Xi(j+1))-HeSC(Xijᶄ)-HeSC(Xiᶄj)-HeSC(Xᶄij)-Héëêêêêêêêùûúúúúúúú+dIsfdt-μMαμMγ000éëêêêêêêùûúúúúúú+㊀㊀dIcdt(n-1)((1-μ)Mα+λMγ)(n-1)(Mα+(λ-μ)Mγ)(n-1)(Mα+λMγ)-(Mα+λMγ)0éëêêêêêêêùûúúúúúúúꎮ(3)其中μ=NfNꎻ(4)MSC(Xij)Xij(F)=μMαꎻ(5)MSC(Xi(j+1))Xij(F)=μMγꎮ(6)式中:eSC(Xij)㊁eSC(Xi(j+1))㊁eSC(Xijᶄ)㊁eSC(Xiᶄj)㊁eSC(Xᶄij)分别为匝间短路故障下SCXij㊁SCXi(j+1)㊁SCXijᶄ㊁SCXiᶄj㊁SCXᶄij的反电势ꎬ即典型的5种不同位置处的探测线圈反电势ꎻNf为故障线圈的短路匝数ꎻN为线圈的总匝数ꎻMα为探测线圈与同齿定子线圈之间的互感ꎻMγ为探测线圈与相邻齿定子线圈之间的互感ꎬ对于采用分数槽集中绕组的电机来说ꎬMα远大于MγꎻMSC(Xij)Xij(F)和MSC(Xi(j+1))Xij(F)分别为探测线圈SCXij和SCXi(j+1)与定子线圈Xij故障部分之间的互感ꎻλ为线圈组中与探测线圈相邻的定子线圈个数(Type-I型探测线圈的λ为2ꎬType-II型探测线圈的λ为1)ꎻIsf为流过线圈短路部分的瞬时电流ꎻIc为流过线圈健康部分的环流ꎮ为了验证上述匝间短路故障下探测线圈数学模型的正确性ꎬ本文以一台72槽66极的MB ̄DDPMSM作为研究对象ꎬ其关键的参数如表2所示ꎮ表2㊀MB ̄DDPMSM的主要参数Table2㊀KeyparametersofMB ̄DDPMSM721第3期陈㊀昊等:永磁同步电机匝间短路故障短路线圈定位方法㊀㊀在MagNet中建立了MB ̄DDPMSM有限元模型(finiteelementmodelꎬFEM)ꎮ为了模拟匝间短路故障ꎬ需要在MagNet中对绕组外电路模型进行故障设置ꎮ以A11为例ꎬ在绕组外电路中将A11的两端并联一个短路电阻ꎮ当电机正常运行时ꎬ将短路电阻阻值设置为1MΩꎬ此时A11为健康状态ꎻ当A11发生匝间短路故障时ꎬ将短路电阻阻值设置为0ꎬ此时A11故障匝数为48匝ꎮ若要调整线圈的短路匝数ꎬ需要把短路线圈的几何模型按照匝数比例分成短路与正常部分两部分ꎬ这两部分各自为一个线圈ꎬ然后外电路中将短路部分线圈两端并联一个短路电阻ꎬ其余故障设置方式与A11故障时一致ꎮ图3为布置有探测线圈的MB ̄DDPMSM样机结构示意图ꎮ图3㊀MB ̄DDPMSM结构示意图Fig.3㊀MB ̄DDPMSMstructure图3中A11为短路线圈ꎮ以A11作为参照ꎬ选取了前述5个典型位置安装探测线圈ꎬ即在TA11㊁TA12㊁TA13㊁TA31㊁TB13上安装探测线圈SCA11㊁SCA12㊁SCA13㊁SCA31㊁SCB13ꎮ利用有限元模型与所提出的数学模型对电机健康与A11短路48匝时探测线圈反电势进行分析ꎬ结果如图4所示ꎮ由图4可以看出ꎬ电机健康以及A11匝间短路故障下解析结果和有限元结果都具有较好的一致性ꎮ健康状态下ꎬ峰值解析结果与有限元结果的最大误差为1%ꎬ该误差是建模时忽略了磁路饱和㊁谐波等影响造成的ꎮA11匝间短路故障下ꎬ峰值解析结果与有限元结果的最大误差为5.75%ꎬ该误差是建模时忽略了ISF故障对旋转磁场影响ꎬ忽略了磁路饱和㊁谐波等影响造成的ꎮ上述结果表明ꎬ所建立的匝间短路故障下不同位置处探测线圈反电势数学模型是正确有效的ꎮ图4㊀探测线圈反电势对比结果Fig.4㊀ComparisonoftheSCback ̄EMF821电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀3㊀匝间短路故障特征量研究可靠㊁有效㊁敏感的故障特征量对于匝间短路故障检测及短路线圈定位十分重要ꎮ本节根据所建立的探测线圈反电势矩阵ꎬ进行匝间短路故障检测及线圈组定位特征量研究㊁短路线圈定位特征量研究ꎮ3.1㊀探测线圈组为了得到故障定位特征量ꎬ将探测线圈进行分组ꎬ具体方式为:X相每条支路上第j个线圈所在的定子齿上的探测线圈分成一个探测线圈组ꎬ该探测线圈组定义为SCGXjꎮ电机X相上探测线圈及探测线圈组的示意图如图5所示ꎮ图5㊀X相探测线圈组Fig.5㊀SCgroupofXphase3.2㊀匝间短路故障检测及定位特征量1)匝间短路故障检测及故障线圈组定位特征量ꎮ对于MB ̄DDPMSMꎬ确定故障线圈组的位置需要先确定故障相的故障支路的位置ꎬ然后再确定短路线圈所在的线圈组的位置ꎮ为了能获取包含上述位置信息的特征量ꎬ对探测线圈组中的探测线圈反电势进行分析ꎮ将同一个探测线圈组中不同支路上的探测线圈反电势相减ꎬ所得差值就是探测线圈组中的探测线圈反电势差值(searchcoildifferentialback ̄EMFꎬSC ̄DB)ꎬ其表达式为eiiᶄ-(Xj)=eSC(Xij)-eSC(Xiᶄj)ꎮ(7)式中:eSC(Xij)和eSC(Xij)分别为SCGXj中SCXij和SCXiᶄj的反电势(iʂiᶄ)ꎻeiiᶄ-(Xj)被定义为探测线圈SCXij与SCXiᶄj反电势差值ꎮ当电机处于健康状态时ꎬ根据式(2)可知ꎬ探测线圈组中的各个探测线圈反电势幅值相同ꎬ因此SCDB为0ꎮ当定子线圈Xij发生匝间短路故障时ꎬ根据式(3)的第五行可知ꎬ非故障相Xᶄ上的探测线圈组中各个探测线圈反电势几乎不变ꎬ因此SCDB为0ꎮ对于故障相Xꎬ根据式(3)的第一和第四行可得SCGXj中Xi支路与Xiᶄ支路上的探测线圈之间的反电势差值eiiᶄ-(Xj)为eiiᶄ-(Xj)=μMαdIsfdt+n((1-μ)+1nμ)Mα+λMγ)dIcdtꎮ(8)根据式(3)的第四行可得SCGXj中Xiᶄ支路与Xiᵡ支路上的探测线圈之间的反电势差值(iᵡʂiꎬiᶄ)eiᶄiᵡ-(Xj)为eiᶄiᵡ-(Xj)=0ꎮ(9)对于线圈组SCGXjᶄ(jᶄʂj)ꎬ根据式(3)的第三和第四行可得SCGXjᶄ中Xi支路与Xiᶄ支路上的探测线圈之间的反电势差值eiiᶄ-(Xjᶄ)为eiiᶄ-(Xjᶄ)=n(Mα+λMγ)dicdtꎮ(10)根据式(3)的第四行可得SCGXj中Xiᶄ支路与Xiᵡ支路上的探测线圈之间的反电势差值eiᶄiᵡ-(Xj)为eiᶄiᵡ-(Xjᶄ)=0ꎮ(11)由式(8)~式(11)可知ꎬ当Xij匝间短路发生时ꎬ故障支路Xi与健康支路Xiᶄ上的探测线圈之间反电势存在明显差值ꎬ故障相健康支路Xiᶄ支路与Xiᵡ支路上的探测线圈之间反电势差值为0ꎮ因此ꎬ可以根据同一探测线圈组中故障支路与健康支路的探测线圈间反电势差值非零ꎬ而健康支路间的探测线圈反电势差值皆接近于0的特点判定故障支路ꎮ确定故障支路后ꎬ需要进一步确定故障线圈组的位置ꎮ当Xij匝间短路发生时ꎬ对比式(10)与式(8)ꎬ由于Isf远大于Icꎬ因此eiiᶄ-(Xj)与eiiᶄ-(Xjᶄ)存在以下关系:Eiiᶄ-(Xj)<Eiiᶄ-(Xjᶄ)ꎮ(12)式中Eiiᶄ-(Xj)和Eiiᶄ-(Xjᶄ)分别为eiiᶄ-(Xj)和eiiᶄ-(Xjᶄ)的幅值ꎮ由式(12)可知ꎬ当Xij发生匝间短路故障时ꎬSCGXj中的eiiᶄ-(Xj)的幅值为所有SCDB中最大的ꎮ当Xi(j-1)或Xi(j+1)发生匝间短路故障时(Xi(j-1)ꎬXijꎬXi(j+1)是同一线圈组中的线圈)ꎬ根据式(3)的第四和第五行可得非故障相Xᶄ上ꎬ及故障相X上SCGXj㊁SCGXjᶄ中Xiᶄ支路与Xiᵡ支路上探测线圈间的SCDB为0ꎮ根据式(3)中第二㊁三㊁四行可得故障相X上SCGXj㊁SCGXjᶄ中Xi支路与Xiᶄ支路上921第3期陈㊀昊等:永磁同步电机匝间短路故障短路线圈定位方法探测线圈间的SCDB分别为:eiiᶄ-(Xj)=μMγdIsfdt+n(Mα+((λ-μ)+μn)Mγ)dIcdtꎻ(13)eiiᶄ-(Xjᶄ)=n(Mα+λMγ)dIcdtꎮ(14)对比式(13)与式(14)ꎬ二者幅值大小关系为:当Xi(j-1)或Xi(j+1)发生匝间短路故障时ꎬSCGXj中的eiiᶄ-(Xj)的幅值为所有SCDB中最大的ꎮ综上ꎬ当Xi(j-1)㊁Xij㊁Xi(j+1)任意一个线圈发生匝间短路故障时ꎬSCGXj中SCXij与其他支路探测线圈间的SCDB大于SCGXjᶄ中SCXijᶄ与其他支路上探测线圈间的SC ̄DBꎮ因此ꎬ可以根据故障线圈组对应位置处的探测线圈与其他支路的探测线圈的反电势差值幅值是所有SCDB中最大的特点判定故障线圈组的位置ꎮ综上ꎬ探测线圈组中的SCDB可以被用来进行匝间短路故障检测与故障线圈组的定位ꎮ根据上述分析可以看出ꎬ当线圈组中有3个线圈时ꎬ若要确定该线圈组是否为故障线圈组ꎬ仅需在第2个线圈所在定子齿上安装探测线圈ꎻ当线圈组中有两个线圈时ꎬ若要确定该线圈组是否为故障线圈组ꎬ仅需在任意一个线圈所在定子齿上安装探测线圈ꎮ因此第一节中所提出探测线圈阵列中的Type-I型和Type-II型探测线圈作为ISF诊断工具是有效的ꎮ为了验证故障线圈组定位特征量的有效性ꎬ以样机为例ꎬ在样机的每个线圈组中安装一个Type-II型探测线圈ꎬ样机A相探测线圈及探测线圈组的示意图如图6所示ꎮ图6㊀样机A相的探测线圈及探测线圈组Fig.6㊀SCandSCgroupofXphaseinmodelmachine由于样机的每相和每个线圈组是等效的ꎬ因此B㊁C相的探测线圈与探测线圈组的安装与分组情况与A相类似ꎬ表3列出了探测线圈及分组情况ꎮ表3㊀样机中探测线圈及探测线圈组Table3㊀SCandSCgroupofthemodelmachine所在相探测线圈组探测线圈ASCGA1SCA11ꎬSCA21ꎬSCA31SCGA3SCA13ꎬSCA23ꎬSCA33BSCGB1SCB11ꎬSCB21ꎬSCB31SCGB3SCB13ꎬSCB23ꎬSCB33CSCGC1SCC11ꎬSCC21ꎬSCC31SCGC3SCC13ꎬSCC23ꎬSCC33将A11和A12构成的线圈组记为线圈组1ꎬA13与A14构成的线圈组记为线圈组2ꎮ表4列出了健康㊁A11短路48匝和A12短路48匝的探测线圈组中SC ̄DB的幅值ꎮ表4㊀不同匝间短路故障下探测线圈组中SCDB的幅值Table4㊀PeakofSCDBinSCgroupunderISF探测线圈组SCDB幅值/V健康A11故障A12故障SCGA1e12-(A1)0.088.043.92e23-(A1)0.090.230.24e31-(A1)0.037.993.95SCGA3e12-(A3)0.050.840.99e23-(A3)0.090.090.09e31-(A3)0.080.891.01SCGB1e12-(B1)0.110.140.16e23-(B1)0.080.120.11e31-(B1)0.110.130.11SCGB3e12-(B3)0.120.120.12e23-(B3)0.110.150.24e31-(B3)0.090.150.23SCGC1e12-(C1)0.090.090.14e23-(C1)0.020.120.11e31-(C1)0.110.130.17SCGC3e12-(C3)0.110.120.14e23-(C3)0.020.090.07e31-(C3)0.110.130.14从表4中可以看出ꎬB㊁C相探测线圈组中SC ̄DB的幅值很小且故障前后没有明显变化ꎮ对于A相探测线圈组中的SCDBꎬ当A11故障SCGA1中e12-(A1)和e31-(A1)的幅值相较于健康时有明显变化且大小相同ꎬe23-(A1)的幅值几乎没有变化且大小几乎为0ꎮSCGA3中e12-(A3)和e31-(A3)的幅值相较于健康时有变化且大小相同ꎬ而e23-(A3)的幅值几乎没031电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀有变化且大小几乎为0ꎮ上述SCDB幅值间的逻辑关系表明故障发生在A相的A1支路上ꎮ另外ꎬe12-(A1)的幅值为8.04ꎬe12-(A3)的幅值为0.84ꎬe12-(A1)的幅值大于e12-(A3)的幅值ꎬ因此判定故障线圈组为线圈组1ꎬ而非线圈组2ꎮ该识别结果与预设故障情况一致ꎮ当A12故障SCGA1中e12-(A1)和e31-(A1)的幅值相较于健康时有明显变化且大小相同ꎬe23-(A1)的幅值几乎没有变化且大小几乎为0ꎮSCGA3中e12-(A3)和e31-(A3)的幅值相较于健康时有变化且大小相同ꎬ而e23-(A3)的幅值几乎没有变化且大小几乎为0ꎮ上述SCDB幅值间的逻辑关系表明故障发生在A相的A1支路上ꎮ另外ꎬe31-(A1)的幅值为3.95ꎬe12-(A3)的幅值为0.99ꎬe31-(A1)的幅值大于e31-(A3)的幅值ꎬ因此判定故障线圈组为线圈组1ꎬ而非线圈组2ꎮ该识别结果与预设故障情况一致ꎮ上述结果验证了SCDB作为匝间短路故障检测与故障线圈组定位特征量的正确性与有效性ꎮ2)匝间短路故障线圈定位特征量ꎮ在确定故障线圈组后ꎬ为了确定具体发生匝间短路故障的线圈ꎬ对位于故障线圈组中的探测线圈反电势进行分析ꎮ根据电磁感应定律可知ꎬ探测线圈反电势大小与所在定子齿磁通有关ꎮ文献[16]指出ꎬ线圈匝间短路前后故障齿中的磁通为ϕFϕH=Rf|Rf+jkωηN2fL|ꎮ(15)其中:Rf为短路电阻ꎻj为虚数符号ꎻL为线圈的电感ꎻω为电机旋转的角速度ꎻη为线圈一匝电感与总电感之比ꎮ从式(15)可以看出ꎬ匝间短路故障后故障齿上探测线圈中的磁通减小ꎬ反电势减小ꎮ对于集中绕组结构的电机来说ꎬ彼此相邻的定子齿中的磁通向量相差180ʎ电角度ꎬ因此与故障齿相邻的定子齿中的磁通增加ꎬ该齿上的探测线圈反电势增加ꎮ将实时获取的探测线圈反电势与电机健康状态下的探测线圈反电势相减ꎬ所得差值为该探测线圈反电势残差(searchcoilresidualback ̄EMFꎬSCRB)ꎬ其表达式为ΔeSC(Xij)=eSC(Xij)-eSC(Xij)-Hꎮ(16)式中:ΔeSC(Xij)为SCXij的反电势残差ꎻeSC(Xij)㊁eSC(Xij)-H分别为实际获取的SCXij反电势的瞬时值和电机健康状态下SCXij反电势的瞬时值ꎮ当电机处于健康状态时ꎬ探测线圈的反电势残差为0ꎮ当电机发生匝间短路故障时ꎬ若短路线圈与探测线圈在同一个定子齿上ꎬ该探测线圈反电势残差小于0ꎻ若短路线圈与探测线圈相邻ꎬ该探测线圈反电势残差大于0ꎮ为了验证故障线圈定位特征量的正确性ꎬ以样机为例ꎬ分别对A11发生100%匝间短路故障和A12发生100%匝间短路故障时探测线圈SCA11的反电势及反电势残差进行分析ꎬ仿真结果如表5所示ꎮ表5㊀不同匝间短路故障下SCXij的探测线圈反电势残差Table5㊀SCRBinSCXijunderISF故障线圈SCA11反电势幅值/V健康故障反电势残差/VA1115.918.73-7.18A1215.9117.671.76从表5中可以看出ꎬ当A11故障时ꎬSCA11的反电势相较于健康时幅值减小ꎬSCRB为-7.18Vꎬ小于0ꎻ当A12故障时ꎬSCA11的反电势相较于健康时幅值增加ꎬSCRB为1.76Vꎬ大于0ꎮ该结果与解析结果一致ꎬ验证了所提出的结论的正确性ꎬ说明了可以根据SCRB来实现短路线圈的定位ꎮ另外文献[17]指出ꎬ故障线圈中的电流在定子齿中产生的磁通的相位与定子齿空间位置有关ꎮ不同线圈发生匝间短路故障时ꎬ同一个探测线圈的反电势相位不同ꎮ因此对于a型线圈组ꎬ进一步分析Type-II型探测线圈反电势相位即可确定短路线圈位置ꎮ综上所述ꎬMB ̄DDPMSM中故障线圈的位置ꎬ可以利用探测线圈组中SCDB的幅值最大值与故障线圈组中探测线圈的SCRB来确定ꎮ探测线圈阵列可以作为MB ̄DDPMSM匝间短路故障诊断的工具ꎮ4㊀实验与分析4.1㊀实验平台搭建为了验证本文所提出的永磁同步电机匝间短路故障定位方法的有效性与准确性ꎬ以文中的样机为研究对象搭建了实验测试平台ꎬ如图7所示ꎮ该实验测试平台由故障电机㊁驱动电机㊁转速转矩测量仪㊁工控机㊁驱动器㊁数据采集卡等构成ꎮ其中ꎬ驱动器用来驱动和控制样机ꎬ数字示波器用于显示对应电压波形ꎮ数据采集卡同步采集电机中探测线圈感131第3期陈㊀昊等:永磁同步电机匝间短路故障短路线圈定位方法应电势ꎬ数据采集器选取阿尔泰USB-3202Nꎬ其采用频率为250kS/sꎬ16ADC分辨率ꎬ增益误差为ʃ0.2%ꎬ输入阻抗为10MΩꎮ图7㊀匝间短路样机实验平台Fig.7㊀ExperimentalsetupofMB ̄DDPMSMwithISF如图7所示ꎬ为了研究早期匝间短路ꎬ将一个线圈拆分成了4个子单元ꎬ并将每个子单元的抽头两端接在外部的端子排上ꎮ将子单元的抽头并电阻并联就可以模拟电机发生匝间短路故障ꎮ下面对A11和A12分别短路50%情况下进行实验研究ꎮ故障设置方法如下:将A11线圈(A12线圈)抽头所在的端子排上外接一个短路电阻ꎬ以模拟电机发生匝间短路故障ꎮ为了保证实验的安全性ꎬ将短路电阻设置为2Ωꎬ电机在空载条件下运行ꎮ4.2㊀匝间短路故障实验图8为A11和A12分别短路50%情况下实测的各个探测线圈中的SCDB的幅值ꎮ从图8中可以看出ꎬ在两种故障情况下ꎬA1支路与A2支路㊁A1支路与A3支路上探测线圈间的SCDB幅值明显大于0且大小几乎相同ꎬ而A2与A3支路上探测线圈间的SCDBꎬB㊁C相探测线圈组中SCDB的幅值几乎为0ꎮ同时e12-(A1)和e31-(A1)的值远大于其它SCDBꎮ上述实测的SCDB的逻辑关系说明:故障线圈组为线圈组1ꎬ短路线圈可能为A11或A12ꎮ该识别结果与样机实际设置的匝间短路故障一致ꎬ证明SCDB可以确定短路线圈组的位置ꎮ表6为A11和A12分别短路50%情况下实测的和解析计算的SCA11的反电势与SCRB的幅值ꎮ从表6中可以看出ꎬSCA11反电势幅值的实验结果与解析计算结果基本一致ꎬ其最大误差为4.1%ꎮ另外ꎬ由表6可知ꎬ当A11故障时ꎬSCA11反电势幅值减小ꎬSCA11的SCRB为-3.05Vꎻ当A12故障时ꎬSCA11反电势幅值增加ꎬSCA11的SCRB为1.79Vꎮ上述实验结果与3.2.2节中不同故障下SCRB的理论分析结果一致ꎬ证明SCRB可以确定短路线圈位置ꎮ图8㊀不同位置匝间短路故障时探测线圈反电势差值幅值Fig.8㊀SimulationandexperimentalresultofthepeakofSCDBwithdifferentISFlocation表6㊀不同匝间短路故障下SCXij的探测线圈反电势残差Table6㊀ExperimentalresultofSCRBinSCXijunderISF短路线圈反电势(实验)/V反电势(解析)/VSCRB/V健康故障健康故障实验解析A116.313.266.193.09-3.05-3.1A126.318.176.197.981.861.79综上ꎬ利用所提出的故障特征量能够确定电机实际运行时发生匝间短路故障的线圈位置ꎮ同时ꎬ实验中所设置的短路匝数仅占相绕组总匝数的12.5%ꎬ因此所提出的方法可以实现电机早期匝间短路故障的定位ꎮ231电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀。
永磁同步电机匝间短路故障在线诊断研究2500字
分析永磁同步电机匝间短路故障常用的模拟方法,研究我国匝间短路故障诊断方法,在目前发展状况,预测定子匝间短路故障的处理方法,提出了针对解决匝间短路故障的解决注意问题。
永磁同步电机匝间短路故障不能被诊断得到纠正,会造成一定故障问题,需要及时对于故障进行诊断,对于影响车辆的正常运行,减少故障的破坏性,早期及时发现故障及时处理,减少故障诱发的停机问题,保障机器正常运转模式。
/3/view-13032379.htm
永磁;同步;电机;匝间短路故障;诊断
永磁同步电机的结构一般比较紧凑,体积比较小,重量比较轻,工作效率也比较高,工作具有很高可靠性,噪声比较低的特点。
在电动汽车驱动综合指标中,电动汽车的电机需要合理选择。
通常情况下电动汽车的运行环境比较复杂,会涉及到很多方面问题,比如振动、湿度、粉尘和频繁起动等问题,这些都会直接影响到电机安全运行问题,会诱发一定电机故障问题。
一、永磁同步电机定子匝间短路故障模拟方法分析
永磁同步电机定子匝间短路故障诊断研究中,可以集中分为两个方面,要寻找故障特征量,判断故障发生,判定故障的严重程度,对于永磁同步电机定子匝间短路故障进行及时处理,总结变化规律,及时判断故障发生的原因,有效分析故障出现问题,利用有效办法解决故障问题,比如采用有限元分析方法,建立良好故障模型,减少故障发生,设定良好电机运行环境,对于电机故障仿真处理,分析形成故障原因,采用有效措施解决故障。
另一种办法就是建立永磁同步电机数学模型,借助仿真平台,提高故障处理,设定良好的接头和附加电阻,及时调整好电阻大小,分析定性电阻之间关系。
二、永磁同步电机定子匝间短路故障短路故障诊断方法研究分析
在电机运行过程中,要提高内部空间存在的气隙磁场,电机中的点磁场要在不同媒质中分布,根据变化情况分析,实现对于电机运行状态性能分析,及时反映电机内部磁场的数学模型,运用良好的诊断方法对于电机进行分析研究,常用的方法有参数辨识法、卡尔曼滤波算法和磁通估计法等。
建立良好永磁同步电机匝间短路故障处理模式,有效控制好系统基础上的仿真模型,针对电流发生的故障处理好数学模型,如果出现电机的绕组故障问题,快要针对坐标数学模型,做好建模仿真工作,实现对于电机常见故障仿真方法处理。
在永磁同步电机数学模型基础上,推动坐标系的匝间短路故障处理,建立良好电机互感和反向磁动势动态参数分析,建立良好故障电机仿真模型,附加合理电机模拟匝间短路故障严重程度分析,解决故障电流不平衡问题。
在电机发生故障的时候,电气量的电流的电压都会发生一定变化,需要借助变换的信号及时处理好故障信息问题,常见的信号变换主要是对于电机状态的监测和故障诊断工作,比如小波?化、电机电流频谱分析和傅里叶的变换方法处理。
要及时消除电机固有不对称供电影响问题,提出功率分解技术故障检测方法,有效消除故障产生的负序电流影响问题,及时检测电流线圈故障问题,准确获得电机参数,提高大幅度的故障诊断精度分析,
基于人工职能的诊断方法研究中,人工职能可以有效模拟人类分析处理问题的职能行为,需要提高数学模型分析和研究,保障永磁同步电机故障有效诊断研究,采用新的研究方法,提高故障诊断系统维护智能化,保障人工职能诊断方法处理合理性。
处理中要及时有效将负荷波动产生的高频成分从负面电流中分离出来,调整好电流的负序阻抗作用,及时判断故障
发生原因,定性评价故障问题,解决网络电流预测,分析电流预测电流之间的残差问题,解决故障问题,保障运行顺利。
三、永磁同步电机匝间短路故障诊断方法发展趋势分析
基于数学模型的诊断过程中,要充分提高电机磁场数值计算,提高精度管理效果,针对计算机中复杂问题,要保障信号处理的故障诊断合理性,在电机设备故障诊断过程中,要保障人工智能诊断学习方法合理性。
对于诊断方法智能化程度研究中,要促进永磁同步电机和传统电机结构性分析,保障结构复杂性,控制好结构的复杂性,变频器是驱动电源的永磁同步电机最重要问题,变频器大量功率器可以增加电机面对故障短路问题,根据故障诊断技术提高复杂电机的设备故障处理。
人工智能的方法研究中,要充分结合诊断方法,保障系统和神经网络结合,提高逻辑和神经网络诊断合理性,采用融合模糊理论和神经网络理论,保障结构的多层性,优化检测故障信号和网络输入,经过模糊量化处理故障,保障故障隶属关系合理,提高阀值判别的方法准确性和灵活性,提高永磁直线同步电机故障处理。
人工智能信号的变换频谱分析和优化算法结合中,要充分诊断高频分辨率,准确估计故障特征,提高频率的分量幅值和估计却准确性,优化算法,确定诸多频率分量幅值和理想性。
四、结论
综上所述,永磁同步电机故障诊断系统中,要不断发展集成化、高精度化、智能化和网络化,做好永磁同步电机转子结构特殊性转化,准确的建立永磁体模型研究课题,采用有限元方法建立故障模型,及时考虑建模准确性,提高网格化精细度分析。
在电机各个部分做好网格划分,提高网格机密处理,处理好故障特征,保证故障有效处理,做好电机故障检测和故障诊断工作,在设计线诊断系统中考虑到信号提取,保障器件高效运行。
参考文献:
[1]张志艳,马宏忠,钟钦,赵利军.永磁同步电机不对称运行负序分量特性分析[J].电测与仪表,2014(16);
[2]梁伟铭,陈诚,任纪良,郑瑞广.永磁同步电机定子匝间短路故障诊断的研究现状及发展趋势[J].微电机,2013(02).
[3]刘平,孟江,何强.基于MATLAB/SIMULINK的异步电机故障诊断[J].煤矿机械,2013(02).
[4]宋辉,张立华,李坤,李来营.基于扩展Park矢量的电机故障诊断系统设计[J].电气自动化,2012(03).
[5]王海岗,张坤宇,张雁佳,刘特力,VC与MATLAB混合编程在图像处理中的应用[J].计算机应用与软件,2012(01).。