双足机器人上楼梯步态的规划与控制
- 格式:pdf
- 大小:381.26 KB
- 文档页数:5

双足行走机器人知识点总结一、概述双足行走机器人是一种仿生机器人,模拟人类的行走方式,具有独特的工作原理和技术特点。
双足行走机器人的出现,不仅是人工智能和机器人技术的进步,也是对人类步行机理的深入研究和模拟。
双足行走机器人在军事、医疗、救援、娱乐等领域有着广泛的应用前景,具有较高的研究和开发价值。
本文将对双足行走机器人的相关知识点进行总结,包括其工作原理、技术特点、应用领域、研究进展等方面的内容。
二、工作原理双足行走机器人的工作原理主要包括下面几个方面:1. 仿生学原理双足行走机器人的设计初衷是模拟人类的行走方式,因此其工作原理主要受到仿生学的影响。
通过对人类步行过程和髋关节、膝关节等关节运动原理的研究,获得了双足行走机器人的灵感和设计方向。
2. 动力学原理双足行走机器人的行走是由电动机、液压系统或气动系统提供动力,通过控制步进和踢腿的方式,实现机器人步态的模拟。
通过对机械结构的精确设计和动力学方程的优化计算,提高了双足行走机器人的步行效率和稳定性。
3. 控制原理双足行走机器人的控制系统是其核心技术之一,包括硬件控制和软件控制两方面。
在硬件控制方面,采用传感器检测地面状态和机器人姿态,实现对机器人动作的精确控制;在软件控制方面,采用运动规划和动力学优化算法,实现机器人稳定行走和适应不同地形的能力。
4. 感知与决策双足行走机器人的感知与决策系统是其智能化的重要组成部分,包括视觉、声音、激光雷达等传感器,以及路径规划、障碍避障等决策算法。
通过对环境信息的感知和对行为的决策,实现双足行走机器人在复杂环境中的稳定行走和智能导航。
三、技术特点双足行走机器人具有以下技术特点:1. 多关节结构双足行走机器人与传统的轮式机器人相比,具有更加复杂的多关节结构,可以实现更加灵活的步态和更加复杂的动作。
通过对关节结构和驱动方式的优化设计,提高了机器人的运动性能和动态稳定性。
2. 动力系统双足行走机器人的动力系统包括电动机、液压系统或气动系统,可以实现不同的步态演示和负重运输。
双足机器人走路原理首先,双足机器人走路的基本原理是通过仿生学的方式,模拟人类的步行动作。
人类的步行是通过身体的平衡、肌肉的收缩和放松、身体的倾斜和踏步等一系列复杂的生理过程来完成的。
双足机器人需要模拟这些步行动作,并将其转化为机械动作。
其次,双足机器人走路的关键是保持身体平衡。
为了实现这一点,机器人需要使用一些传感器来感知自己的姿态和环境的变化。
典型的传感器包括陀螺仪、加速度计、力、力矩传感器等。
同时,机器人还需要一个控制系统来读取这些传感器的数据,并做出相应的反馈调整。
这种控制系统可以是基于传感器反馈的闭环控制系统,也可以是基于预设参数的开环控制系统。
第三,双足机器人走路的过程可以分为几个关键步骤。
首先,机器人需要抬起一个脚,同时将其放在目标位置的前方。
这需要机器人的关节系统和电机系统协同工作,以提供足够的力和精确的控制。
然后,机器人将重心转移到抬起的脚上,并用另一只脚推进向前。
这需要机器人的关节和电机系统再次协同工作,以提供足够的力来推动身体。
最后,机器人将先前的脚放在目标位置的背后,并将重心转移到该脚上。
这样,机器人就完成了一步。
另外,双足机器人走路还需要考虑如何保持稳定性。
在步行过程中,机器人可能会遇到各种不同的环境条件,如坡度、不平整的地面和外部干扰力等。
为了保持稳定,机器人需要不断调整自身的姿态和步伐。
这一过程可以通过控制系统中的算法和模型来实现,例如使用PID控制算法或模型预测控制方法。
最后,双足机器人走路还需要考虑能量的消耗和效率。
在步行过程中,机器人需要耗费大量的能量来维持平衡和推进。
因此,机器人需要设计合适的电力系统和驱动系统,以提供足够的能量,并同时尽量减少能量的浪费。
综上所述,双足机器人走路的原理是通过模拟人类的步行动作和生理过程,将其转化为机械动作。
这种原理涉及到机器人的感知、控制、力学和能量等多个方面。
随着机器人技术的不断发展,双足机器人走路的原理也在不断创新和提升,以提高机器人的行走能力和适应性。
教学用双足步行机器人步态规划及软硬件设计张蔓;高宇博;邓佳玉;魏庆媛;赵英妤【摘要】阐述了教学用步行机器人的自由度选择及步态规划,分析了六自由度双足机器人行走规律,用CAXA软件画出自由度分部图,运用三点规划法确定了摆动腿踝关节、髋关节的3个步态姿态点,配合多项式插值法确定踝关节运动.选择32路舵机控制器为主控板,并给出直线行走程序.【期刊名称】《林业机械与木工设备》【年(卷),期】2017(045)003【总页数】3页(P38-39,43)【关键词】教学;双足机器人;步态;规划【作者】张蔓;高宇博;邓佳玉;魏庆媛;赵英妤【作者单位】哈尔滨石油学院,黑龙江哈尔滨150028;哈尔滨石油学院,黑龙江哈尔滨150028;哈尔滨石油学院,黑龙江哈尔滨150028;哈尔滨石油学院,黑龙江哈尔滨150028;哈尔滨石油学院,黑龙江哈尔滨150028【正文语种】中文【中图分类】TP242研究与设计机器人是一种智能化机械装置,广泛应用在危险、繁重的工业现场。
固定式机器人通常应用在产品流水线上,移动机器人则可应用在各种环境当中,用于勘察、搬运、星球探测等[1]。
步行机器人在移动机器人中应用最广泛,其特点是适应各类地形地貌,具有行走速度快、能耗小、体积小等优点。
双足机器人(又称仿人形机器人,类人机器人)是步行机器人的一种,和其他移动机器人相比,双足机器人在步行环境的适应性上具有巨大优势,可平地行走,也可以上下台阶,跨越障碍。
目前步行机器人主要应用于康复医学、智能假肢等方面,由于其结构类似人类,赋予其丰富的传感器系统后则可代替人类去特殊的危险领域作业,如太空探测、海底探测、核污染现场作业等,因此研究双足机器人具有非常重要的意义。
一般来说,双足机器人能实现的基本功能有直线行走,上下楼梯、转弯行走等,本文机器人需实现的只有直线行走功能。
直线行走分为以下6个步骤:左腿抬起,重心右移;左腿落下,重心左移;右腿抬起,右腿落下。
双足机器人乐高知识点总结导语:双足机器人技术是一项具有挑战性的领域,它涉及到机械工程、电子工程、计算机科学等多个学科的知识。
而乐高积木是一个非常受欢迎的教育玩具,它能够激发孩子们对科学技术的兴趣,以及培养他们的创造力和动手能力。
本文将对双足机器人与乐高积木的知识点进行总结,帮助读者了解双足机器人技术及乐高积木玩具的相关知识。
一、双足机器人技术1. 双足机器人简介双足机器人是一种模仿人类的步态和行走方式的机器人。
它采用两条腿来进行移动,可以在不平坦的地面上行走,具有较强的适应性和灵活性。
双足机器人技术涉及机械结构、动力学、控制算法等多个领域的知识,是一个多学科交叉的研究领域。
2. 双足机器人的应用双足机器人技术被广泛应用于人工智能、工业生产、医疗护理等领域。
在人工智能方面,双足机器人可以模拟人类的行走和动作,具有更强的交互性和适应性;在工业生产方面,双足机器人可以替代人工进行高强度、高风险的操作,提高生产效率和质量;在医疗护理方面,双足机器人可以用于康复治疗、护理服务等方面,帮助人类改善生活质量。
3. 双足机器人的挑战双足机器人技术面临着多个挑战,包括动力系统设计、行走稳定性控制、环境适应能力等方面。
在动力系统设计方面,双足机器人需要具备足够的动力输出和能量效率,以完成不同场景下的行走任务;在行走稳定性控制方面,双足机器人需要具备动态平衡和稳定控制能力,以应对复杂的环境和地形;在环境适应能力方面,双足机器人需要具备对不同地形和场景的适应能力,以实现更多样化的应用场景。
二、乐高积木玩具1. 乐高积木简介乐高积木是一种由丹麦乐高公司生产的玩具积木,它由不同形状和颜色的积木组成,可以按照不同的方式组合和搭建,构成各种不同的模型和结构。
乐高积木玩具具有丰富的创意和想象力,可以激发儿童们的动手能力和空间想象力,是一种非常受欢迎的教育玩具。
2. 乐高积木的应用乐高积木玩具被广泛应用于教育教学、科普普及、娱乐娱乐等方面。
双足行走机器人知识点双足行走机器人,作为一种仿生机器人,不仅能够模拟人类的行走方式,还具备了一定的平衡和稳定性。
它的出现使得机器人在不同地形和环境下能够更加灵活地进行移动,具备了更强的适应性和应用潜力。
本文将从多个方面介绍双足行走机器人的知识点,让我们一步一步地了解它。
第一步,了解双足行走机器人的基本结构。
双足行走机器人通常由两个机械臂、两条机械腿、一个机械骨盆和一个控制系统组成。
机械臂用于稳定机器人的身体,机械腿用于行走和平衡,机械骨盆连接机械臂和机械腿,并提供了稳定性。
控制系统则负责控制机器人的动作和行为。
第二步,了解双足行走机器人的行走原理。
双足行走机器人通过模拟人类步态来实现行走。
它的行走原理主要包括步态生成、力学模型和控制算法。
步态生成是指根据机器人的身体结构和环境信息生成机器人的行走步态,力学模型是指通过计算机模拟机器人在行走过程中的力学特性,控制算法是指根据机器人的状态和环境信息,通过控制机械腿的运动来实现稳定的行走。
第三步,了解双足行走机器人的稳定性控制。
双足行走机器人在行走过程中需要保持平衡和稳定,否则容易倒地。
稳定性控制是指通过控制机器人的中心重心位置和机械腿的运动,使机器人保持平衡和稳定。
常用的稳定性控制方法包括模型预测控制、反馈控制和前馈控制等。
第四步,了解双足行走机器人的应用领域。
双足行走机器人具备了更灵活的移动能力,因此在许多领域都有着广泛的应用前景。
例如,在救援任务中,双足行走机器人可以在狭窄的空间中进行搜救;在工业生产中,双足行走机器人可以实现自动化装配和搬运;在军事领域,双足行走机器人可以用于侦察和携带重物等。
第五步,了解双足行走机器人的发展趋势。
随着科技的不断进步,双足行走机器人将会有更多的应用和发展。
未来的双足行走机器人可能会拥有更强的智能化和自主性,能够更加灵活地适应不同的环境和任务。
同时,双足行走机器人还有望与其他技术进行融合,例如视觉识别技术和语音交互技术等,进一步提高机器人的功能和性能。
预规划的实时步态控制算法丁宇;杜玉晓;黄修平;卢冠雄;曾春苗;王洽蓬;牛浩阳【摘要】双足机器人能够在不同地形行走,而稳定的步态是其适应不同地形的前提.首先,结合地形特点和机器人位置,计算稳定的动作,即在机器人行走之前完成动作预规划;然后,通过构建运动学模型、设计姿态、稳定性判断等步骤完成步态规划;最后,通过实验验证此算法可行.【期刊名称】《自动化与信息工程》【年(卷),期】2019(040)001【总页数】4页(P30-33)【关键词】双足机器人;预规划;步态规划;运动学模型【作者】丁宇;杜玉晓;黄修平;卢冠雄;曾春苗;王洽蓬;牛浩阳【作者单位】广东工业大学自动化学院;广东工业大学自动化学院;广东工业大学自动化学院;广东工业大学自动化学院;广东工业大学自动化学院;广东工业大学自动化学院;广东工业大学自动化学院【正文语种】中文随着信息技术迅速发展,工业4.0和中国制造2025等战略的提出,人工智能领域受到广泛关注。
人形机器人作为灵活性、适应性较高的机器人之一,能够代替人类在恶劣的环境下工作,成为国内外研究的热点。
步态控制是提高机器人行走能力的重要组成部分,因此对此方面的研究具有十分重要的意义[1]。
稳定行走是人形机器人设计的难点。
考虑到本团队的软硬件水平,设计了简单实用的预规划的实时步态控制算法。
该算法结合机器人与地形的实际特点,通过构建运动学模型、设计姿态、稳定性判断等步骤,预先计算机器人每一步的位姿,完成步态的预先规划。
机器人根据预先计算的结果调整每一步的位姿,从而保证行走稳定。
通过分析人形机器人关节自由度,并与人体关节自由度相对比,设计本文使用的机器人样机。
机器人关节示意图如图1所示,其中一个关节即为一个舵机,图1中标号为舵机编号。
运动学模型是指机器人全身各处的关节角度和各个连杆位姿之间的关系,它是双足机器人完成步态规划的基础。
图1中,在机器人的各处关节自由度上创建局部坐标系,各坐标原点均位于关节自由度转动轴的中心点。
诚信声明本人郑重声明:本论文及其研究工作是本人在指导教师的指导下独立完成的,在完成论文时所利用的一切资料均已在参考文献中列出。
本人签名:年月日毕业设计任务书设计题目:基于MATLAB的双足步行机器人腿部运动模型的建立与运动仿真系部:机械工程系专业:机械电子工程学号:112012337学生:指导教师(含职称):(讲师)专业负责人:1.设计的主要任务及目标1)通过查阅有关资料,了解双足型机器人主要技术参数;2)双足型机器人的腿部模型建立及运动部件设计3)利用Pro/E完成动作的仿真2.设计的基本要求和内容1)双足型机器人的腿部功能选择;2)模型的建立;3)运动的仿真4)完成毕业设计说明书的撰写3.主要参考文献[1] 孙增圻.机器人系统仿真及应[ J ].系统仿真报,1995 ,7( 3 ):23-29.[2] 蒋新松,主编.机器人学导论[ M ].沈阳:辽宁:辽宁科学技术出版社,1994.[3] 蔡自兴.机器人学[ M ].北京:清华大学出版社,2000.[4] 薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用[ M ].北京:清华大学出版社,20024.进度安排设计各阶段名称起止日期1 发放毕业设计题目及选题2015.03.03—2015.03.232 查阅文献,了解研究意义,完成开题报告2015.03.24—2015.04.133 编写说明书,已完成工作,完成中期答辩2015.04.14—2015.05.044 继续编写毕业设计说明书2015.05.01—2015.06.015 提交设计说明书,完成毕业答辩2015.06.02—2015.06.22审核人:年月日基于Matlab的双足步行机器人腿部运动模型的建立与运动仿真摘要:最近几年,双足仿人步行机器人发展很快,有很高的科学研究价值。
步行机器人的运动是模仿人的步行运动的形式,相比其它机器人有更好的灵活性,所以可以完成各种生活中的难度更大的任务,实用价值远高于其它机器人,当然研究难度和控制也相当复杂。
第30卷第2期 哈 尔 滨 工 程 大 学 学 报 V o.l 30 .22009年2月Jour nal ofH arb i n Eng ineeri n g U niversity F eb .2009下肢康复训练机器人步态规划及运动学仿真张立勋,张晓超(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)摘 要:为满足神经受损患者步行康复训练需要,设计了一种具有四自由度步态机构的下肢康复训练机器人,建立了步态机构正逆运动学解析模型;为使机器人能模拟不同步态为患者提供多种训练模式,根据步行运动特征,给出了以步长,步态周期及步态时相为参数的可调步态规划方法.通过基于M atlab \Si m uli nk \SM i M echan ics 环境下的机构运动学仿真分析,验证了运动学模型的正确性以及步态规划的可行性,说明该四自由度步态训练机器人可以模拟正常人步行时的步态和脚踝运动姿态,满足患者步态训练需要.仿真结果还可用于步态机构的参数优化设计,并为后续人机控制系统研究提供必要数据和研究基础.关键词:康复机器人;步态规划;机构模型;运动学仿真中图分类号:T P24 文献标识码:A 文章编号:1006 7034(2009)02 0187 05Gait pl anni ng and ki ne m atic si m ulation for a lower li m b gait rehabilitati on robotZ HANG L i xun ,Z HANG X iao chao(Co llege o fM echanical and E lectr i ca l Eng i neer i ng ,H a rbin Eng i neering U niversity ,H arb i n 150001,Chi na)Abst ract :To satisfy training de m ands forw a l k i n g patientsw ith i m pa ired crania lnerves ,a lo w er li m b gait rehab ilita ti o n robo tw ith a 4 DOF ga itm echan is m w as designed and its k i n e m atics w as deduced based on the closed l o op vec to r m ethod.Furt h er m ore ,by ana l y zi n g the characteristics of nat u ral hu m an gai,t a gait plann i n g m ethod w as pro posed to generate vari o us ga its for the robo t that satisfy the requ ire m ents of training ,using adj u stable para m eters such as ga it stri d e ,ga it cycle ,and t h e rati o of the suppo rt peri o d or s w ay i n g peri o d to t h e ga it cycle .F i n ally ,usi n g a si m ulation envir onm ent inM atlab \S i m ulink \SM i M echan ics ,correction of k i n e m atics w as de m onstrated ,va li d ati n g t h e proposed ga it plann i n g m ethod .The si m u lati o n resu lts can also be used for opti m izi n g desi g n o f the m echan ica l para m eters w hile supp l y ing necessary data and buildi n g a theoretical f o undation for subsequen t research on t h e w ho le contr o l syste m i n vo l v i n g robo t and pa tien.tK eywords :rehab ilitati v e robo;t ga it plann i n g ;m echanicsm ode;l kine m atics si m u lation 收稿日期:2008 04 09.基金项目:国家自然科学基金资助项目(60575053);高等学校博士学科点专项科研基金资助项目(20060217024).作者简介:张立勋(1962 ),男,教授,博士生导师,E m ai:l z hang li xun@ .cn.下肢康复训练机器人是一种通过对患者下肢进行运动训练,促使病人恢复正常行走功能的的自动化医疗设备,适用于下肢偏瘫、腿外伤、脊柱外伤等腿部运动功能障碍患者.一般由步态控制机构,重心调整机构和重力平衡机构组成.各个机构协调运动,模拟人的行走状态,其中,步态机构带动患者脚部运动,实现步行时脚部的运动特征,包括脚的运动轨迹,脚的姿态等,从而避免了过去患者在电动踏步机上训练时,必须由护理人员协助患者的腿步或脚步运动;在减轻护理人员的劳动强度的同时,可提高患者训练的连续性,持续性和科学性[1].德国自由大学研制的名为MGT 型康复机器人模型,其步态机构采用的是一种两自由度双曲柄摇杆机构[2 3];瑞士苏黎世联邦工业大学研制的LOKOMAT 的康复机器人模型采用一种主动式步态矫正装置(driven ga it orthosis ,DGO)带动患者的腿步在踏步机上训练[4];德国FRANHOFER I NSTI TUT I PK 研究所提出采用绳驱系统来实现步态运动[5].MGT 机构设计十分简单,但是由于脚踏板的位姿是由一个自由度确定的,足部的位姿协调与正常步态有一定差距,Loko m at是比较成熟的步态康复训练机器人,驱动双侧髋膝关节4个自由度,实现辅助人在跑步机步态训练.这些方案的优点是结构简单,易于控制,但是由于基于各种人体易化模型,机器人自由度少,步态训练时,患者的一些重要关节运动得不到训练或者纠正.该文以12自由度人体模型为研究对象,由运动学分析可知当上体(假设骨盆躯干为一体)位姿和双足位姿确定,即可确定双腿的运动,即确定髋膝踝关节的运动.因此文中下肢康复训练机器人采用四自由度双足步态机器人和六自由度骨盆机器人两部分构成.其中双足步态机器人系统用于带动患者双脚实现往复步态运动训练过程中脚部的运动,包括类椭圆轨迹步态运动和脚的姿态运动.1 四自由度往复步态机构步态机构采用双侧各单独驱动,并通过规划步态位姿实现步速、步态时相可调的双侧协调步态.四自由度步态机构原理见图1,单侧2自由度.该机构可分为2部分:步态机构和脚姿态机构.步态机构由曲柄1,连杆2,滚轮8,地面支撑7构成,相当于曲柄滑块机构;曲柄转动一周,与连杆2铰接的脚踏板6的回转中心相应走过一个类椭圆轨迹.适当地选择机构参数,可实现模拟往复行走运动轨迹;通过规划两侧主动曲柄运动,实现两侧脚踏板的协调运动.姿态机构由丝杠5,螺母4,连杆3,脚踏板6组成,连杆间铰链连接.丝杠往复运动,可实现脚踏板相对水平方向的摆动,用于模拟步行过程中脚的姿态.协调丝杠与曲柄的运动关系,可模拟和调节人在步态周期中脚的位置和姿态间的动态关系.1-曲柄,2-连杆,3-连杆,4-螺母,5-丝杠,6-脚踏板,7-支撑,8-滚轮图1 步态机器人机构原理图F i g 1 Ske tch of the 4 DO F ga it m echan ics2 机构运动学模型基于闭环矢量法分别建立步态机构和姿态机构的运动学方程.2 1 正运动学模型以左侧为例,步态机构和姿态机构的坐标系设置、闭环矢量如图2所示.其中,步态机构以基础系{o}为参考系;姿态机构以与连杆2上固联坐标系{x 2'o f y 2'}为参考系,o f 为脚踏板回转中心.图2 机构闭环矢量图F i g 2 Sketch of c l o sed loop vector diagra m列写闭环矢量方程:R 1+R 2=R 3,R 1+R 2=R 4,R 5+R 6+R 7=R 8+R 9.将此矢量分解到x 和y 坐标轴上,得到l 1cos 1L +l 2co s 2L =r 3xL ,l 1sin 1L +l 2si n 2L =h,l 1cos 1L +l 3co s 2L =p xL ,l 1sin 1L +l 3si n 2L =p yL ,l 5cos 5L +l 6co s 6L +l 7cos 7L =-l 8,l 5sin 5L +l 6si n 6L +l 7sin 7L =-l 4.(1)式中: iL (i =1,2,!,7)为矢量R i 的矢量角,当i ∀4时, iL 定义为从x 轴指向该矢量;当i >4时, iL 定义为从x 2'轴指向该矢量,规定逆时针方向为正,且- ∀ iL ∀.另外由图中可知 6L = 5L -2,且根据步行时脚与地面夹角的实际情况,限定- /2< 7L < /2.代(1),得cos 1L+l 31-[(h -l 1si n 1L )/l 2]2,h /l 2+l 1(l 2-l 3)/l 2si n 1L ,arcsinh -l 1si n 1Ll 2,(2)#188#哈 尔 滨 工 程 大 学 学 报 第30卷式中:k1L=l8(l82+l42-l52-l6L2+l72),k2=2l7(l28+l24),k3L=4l27(l25+l6L2).则fL=arcsi n h-l1sin 1l2+arcsi n[(k1L+l4k3L-k1L2)/k2].(3)式(2)、(3)为左侧步态机构位置正解.同理可得右侧步态和姿态机构位置正解为p xR=l1co s 1R+l31-h-l1si n 1Rl22,p yR=l3hl2+l1(l2-l3)l2si n 1R,fR=arcsin h-l1sin 1Rl2+arcsin[(k1R+l4k3R-k21R)/k2].(4)式中:k1R=l8(l28+l24-l25-l26R+l27),k3R=4l27(l25+l6R2).将式(1)中第1、2行两边对时间求导数,解方程,并写成矩阵形式,有2L r3xL =1L-l1cos 1L sec 2Ll2-l1sin1L+l1cos 1tan 2L.(5)将式(1)中第3、4行两边对时间求导,并将式(5)代入,得左侧步态机构的速度方程正解:p xLp yL=1Ll1l3/l2cos 1L tan 2L-l1si n 1L(l1-l1l3/l2)cos 1L.(6)同理,右侧步态机构速度方程正解:p xRp yR=1Rl1l3/l2cos 1R tan 2R-l1sin 1R(l1-l1l3/l2)co s 1R.(7)2 2 逆运动学模型由式(2)、(4)可得步态机构速度逆解1L=p xLl1l3/l2cos 1L tan 2L-l1si n 1L,1R=p xRl1l3/l2co s 1R tan 2R-l1si n 1R.(8)根据式(3)、(4)可解得姿态机构的逆解为l6L=M-2l8l4co s 7L+2l8x l4sin 7L,l6R=M-2l8l4cos 7R+2l8l4sin 7R.(9)式中:M=l82+l42+l7227L= fL-7R= fR-3 下肢康复训练机器人步态规划方法为实现康复训练,需要对该四自由度步态机器人进行步态规划,使其能模拟不同步长步速情况下人的步态运动,以满足步行康复训练需要.机器人模拟的是往复步态运动,与正常行走步态特征类似[6],一个步态周期由单脚支撑期和双脚支撑期组成,左右脚在矢状面内的时空运动特性如图3所示,其中t s为单脚单支撑期,t d为单脚双支撑期.椭圆的上半部分模拟摆动脚的运动,下半部分模拟支撑脚的运动.双脚间位置和姿态的协调关系是:在时刻1∃时刻2时间段,整个步态处于单支撑期,右脚支撑,左脚经历整个摆动过程,进入时刻2∃时刻3时间段,左脚也进入支撑,步态进入双支撑期,至时刻3时,右脚脚跟已充分抬起,脚尖欲离地;进入时刻3∃时刻4时间段,步态再次进入单支撑期,只不过换作右脚摆动,左脚支撑,至4点,右脚脚跟开始着地,步态再次进入双支撑期,直至进入1时刻,左脚脚跟充分抬起,脚尖欲离地,开始进入下一个步态周期.图3中左右脚的姿态箭头,起点表示脚跟,终点表示脚尖.根据对人在跑步机脚的姿态的检测数据,在一个步态周期中,协调规律如下:整个支撑期,由支撑脚脚跟着地,放平,至脚跟抬起,脚尖欲离地转后变为摆动脚,摆动脚由脚尖向下至放平到向上,脚跟欲着地重新变为支撑脚,且最大正倾角发生在脚跟接触地面,欲进入支撑时刻,最大负倾角发生在脚尖欲离地进入摆动期时刻,脚的姿态与步态相位近似呈余弦关系.图3 往复步态时空特性F i g.3 T he schem atic d i agra m o f ga i t cy cle由于步态轨迹已由机构尺寸确定,考虑左右对称且左右脚的运动只差180%相位,故只需规划一侧脚的水平速度和姿态即可.人体运动速度往往具有#189#第2期 张立勋,等:下肢康复训练机器人步态规划及运动学仿真钟形曲线的特点,对往复步态来说,无论在支撑期还是摆动期都经历从零加速、减速至零的过程,在椭圆轨迹端点处速度为零,即脚跟着地和脚尖抬起时水平速度为零,另外为保证无冲击步态,此刻加速度也应为零,故而一个步态周期中脚的水平速度可按照加减速段用正弦函数模拟,以左脚为例,摆动期如式(10),支撑期如式(11).p xL(S,T,t)=V1 21+sin tt1-2(0∀t<t1), V1 (t1∀t<t2),V1 21+sint s-tt s-t2-2(t2∀t<t s).(10)p xL(S,T,t)=-V221+sin t-t st d-2(ts∀t<ts+td), -V2 (t s+t d∀t<2t s+t d),-V221+si n T-tt d-2(2t s+t d∀t∀T).(11)式中:V1=2S/(t s+t2-t1);V2=2S/T,T为步态周期,S为步长,t s为摆动期,t d为双支撑期.对式(10)和式(11)积分可得到左脚在一个步态周期中的位移轨迹.右脚的速度及位移轨迹可通过对左脚相应曲线移位1/2个步态周期获得.根据机构原理,曲柄转过一周,则完成一个步态周期,因此曲柄的转角可以用来表示步态的相位.根据脚的姿态与步态相位间的近似余弦关系, s max为摆动脚最大负倾角; d max为支撑脚最大正倾角,则在一个步态周期中,脚的姿态可规划为fL(R)(S,T,t)=A+B s max cos 1L(R).(12)式中:A=( s max+ d max)/2,B=( d max- s max)/2.改变式(10)、(11)和(12)中的S、T、t s、t d、t1、t2、 s max、 d max等参数可模拟具有不同运动特征的往复步态运动.这里,设初始时刻(t=0),脚踏板的初始状态为左踏板位置位于1点,右踏板位于4点,踏板速度为零.为使2个踏板进入协调状态,先令左踏板不动,右踏板由初始位置运动时间t d,至1点,然后启动左踏板,自此双踏板进入协调运动状态.按照正常人的步态时相特征,摆动期占整个步态周期的40%,支撑期占整个周期的60%,其中单个双支撑期为10%,取S=520mm,T=1s,t s=0.4T,t d= 0 1T,t1=016s,t2=0.24s, s max=-30%, d max=30%,则规划的脚踏板水平速度p xL,p xR,姿态角 fL, fR如下图4、5示.图4 脚踏板水平速度规划曲线F i g.4 T he hor i zont a l ve l oc i ty plann i ng curves o f the f ootplates图5 脚踏板姿态规划曲线F i g.5 T he pose p l ann i ng curves o f footp l ates4 下肢康复训练机器人运动学分析为验证运动学解析模型的正确性以及步态规划的可行性,基于m atlab/Si m ulink仿真环境及其下的机构仿真工具S i m M echanics[7],对该四自由度双足步态机器进行了运动学仿真研究,仿真流程如图6所示.首先根据逆运动学公式,在si m ulink下建立逆运动学模块,将规划好的末端双足位姿转化为曲柄丝杠运动信号,然后输入基于SM i echnics下建立的机构正运动学仿真模型,并根据正运动学方程,为模型初始位姿赋值.仿真结果如图7~11所示.其中图7~8为逆运动学仿真输出的曲柄及丝杠运动信号.图9~11为从Si m M echan ics正运动学机构模型传感器取出的脚踏板运动信号.将图9与图4,图10与图5比较,可见由机构模型输出的结果与规划一致,证明运动学模型的正确性.图11为往复步态椭圆轨迹.值得指出的是该仿真模型还可方便地转化为动力学模型,用于控制器设计和动力学问题分析.#190#哈 尔 滨 工 程 大 学 学 报 第30卷图6 仿真流程图F i g.6 The si m ulati on flo w chart图7 左右曲柄转速曲线F ig .7 The angular ve l oc ity curves o fcranks图8 左右丝杠位移曲线F ig .8 The displace m ent cu rves o f thescrews图9 左右脚踏板水平速度仿真曲线F ig .9 The horizonta l ve l ocity curves o f foo t p l ates i n sm i ulation图11 步态椭圆轨迹图F i g .11 The e lli pse l o cus o f reciprocati ng ga it5 结束语运动学仿真分析表明,提出的下肢康复训练机器人四自由度步态机构能够实现具有不同特征的往复步态运动,能根据训练要求提供可调步长,步态周期,步态时相的训练步态.提出的步态规划方法避免了基于测量数据确定机器人运动造成的步态单一,不可调,适应能力差等缺点,该方法对仿人机器人的足部运动规划亦有借鉴作用.仿真结果还可用于步态机构的参数优化设计,并为后续整个人机控制系统研究提供必要数据和研究基础.参考文献:[1]王耀兵,季林红,王广志,等.脑神经康复机器人研究的进展与前景[J].中国康复医学杂志,2003,18(4):230231.WANG Y aob i ng ,JI L i nhong ,WANG G uangzh,i et a.l T he deve l op m en t and prospect o f cranial nerves rehabilita i on robo t[J].Chinese Journa l o f R ehab ilita ti on M edicine ,2003,18(4):230 231.[2]FERR IS D P ,S AW I CK I G S ,DO M I NGO A R.P o w eredl ow er li m b orthoses for ga it rehab ilita ti on[J].T opics i n Spi na l Cord Injury R ehab ili tati on ,2005,11(2):34 49.[3]HESS E S ,UHLENBROCK D .A m echan ized ga it traine r fo rrest o ra ti on o f ga it [J].Journal of R ehabilita tion R esearch and D eve lop m ent ,2000,37(6):701 708.[4]COLOM BO G,J OERG M,SCHREIER R,e t a.l T read m illtra i n i ng of parap l eg ic pati ents usi ng a robo ti c orthosis[J].Journa l o f R ehab ilitati on R esearch and D eve l op m ent ,2000,37(6):693 700.[5]S URD I LOV IC D,ZHANG JI NYU,BERNHARDT R.Stri ng m an :W i re robo t techno l ogy for safe ,flex i ble andhumanfr i end l y gait rehab ili ta ti on[C ]//P roceed i ngs o f the 2007IEEE 10th Internationa lConfe rence on R ehabilita tion R obo ti cs .N oordw ij k ,N etherlands ,2007.[6]郑秀瑗.现代运动生物力学[M ].北京:国防工业出版社,2002:399 401.[7]黄永安,马路,刘慧敏.M a tlab7 0/Si m uli nk 6 0建模仿真开发与高级工程应用[M ].北京:清华大学出版社,2007:262 280.[责任编辑:郑可为]#191#第2期 张立勋,等:下肢康复训练机器人步态规划及运动学仿真。
人形机器人步态规划作者:王南刘月英张海霞来源:《科学与财富》2019年第31期摘要:分析了人形机器人的结构并对其各个关节做了简化处理,以零力矩点(ZMP)作为判断步态行走是否稳定的依据,采用三步规划的方法来规划机器人的步态,推导出人形机器人各关节矢量的步行轨迹的函数表达式,实现了步态的参数化表示。
关键词:人形机器人;步态规划1.前言人形机器人这项技术已经成为了世界上许多国家重要的研究开发项目之一[1]。
其作为高阶、非线性的不稳定系统,它是控制理论在探索过程中的一个非常理想的平台[2]。
从20世纪中期到现在,由于相关技术得到了突飞猛进的发展,最终人们研究出了多种机器人,这些机器人可以在不同的领域中分别得到应用。
分别有小型类人机器人SDR-3X、WABIAN型机器人、人形机器人BIP2000型等,而在诸多类别的机器人中,NAO机器人是一种很具有代表性的机器人[3]。
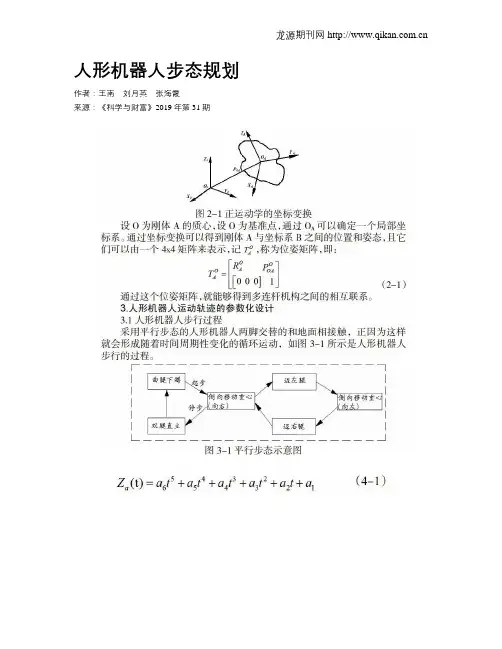
NAO机器人在外部形态上有着与人类非常相似的特征,所以在我们的生活环境中较为适用,可以为我们提供很多方便,为此必将拥有广泛的应用前景2.人形机器人运动学分析位姿矩阵的概念[4]如图2-1所示。
3.人形机器人运动轨迹的参数化设计3.1人形机器人步行过程采用平行步态的人形机器人两脚交替的和地面相接触,正因为这样就会形成随着时间周期性变化的循环运动,如图3-1所示是人形机器人步行的过程。
3.2人形机器人下肢参数化设计人形机器人参数化的设置是机器人运动规划中的关键组成部分。
这些参数值的变化会影响步态轨迹的变化,当参数确定以后,就能够利用优化方法来求取机器人的步态轨迹。
图2-2描述了机器人一个步伐周期的行走轨迹,下面的步态参数是由以上所述的平行步态来定义的:(1)T(周期):机器人向前迈一步所用的时间;(2)H(步长):在一个步行周期的时间内,在一个平面内机器人所走的距离;(3)Z1(步高):行走过程中,摆动腿达到最高点的时候,踝关节距离地面的长度;(4)Z2(髋高):机器人在步行过程当中髋部与地面之间地距离;(5)Y(髋关节侧向移动距离):在行走的一个周期内髋关节向侧方发生偏移的距离;(6)Y1:机器人行走过程中,单足支撑期的时间里髋关节侧向移动的距离。
1 引言机器人是作为现代高新技术的重要象征和发展结果,已经广泛应用于国民生产的各个领域,并正在给人类传统的生产模式带来革命性的变化,影响着人们生活的方方面面。
对于步行机器人来说,它只需要模仿人在特殊情况下(平地或己知障碍物)完成步行动作,这个条件虽然可以使机器人的骨骼机构大大降低和简化,但也不是说这个系统就不复杂了,其步行动作一样是高度自动化的运动,需要控制机构进行复杂而巧妙地协调各个关节上的动作。
双足机器人的研究工作开始于上世纪60年代末,只有三十多年的历史,然而成绩斐然。
如今已成为机器人领域主要研究方向之一。
最早在1968年,英国的Mosher.R 试制了一台名为“Rig”的操纵型双足步行机器人[1],揭开了双足机器人研究的序幕。
该机器人只有踝和髋两个关节,操纵者靠力反馈感觉来保持机器人平衡。
1968~1969年间,南斯拉夫的M.Vukobratovic提出了一种重要的研究双足机器人的理论方法,并研制出全世界第一台真正的双足机器人。
双足机器人的研制成功,促进了康复机器人的研制。
随后,牛津大学的Witt等人也制造了一个双足步行机器人,当时他们的主要目的是为瘫痪者和下肢残疾者设计使用的辅助行走装置。
这款机器人在平地上走得很好,步速达0.23米/秒。
日本加藤一郎教授于1986年研制出WL-12型双足机器人。
该机器人通过躯体运动来补偿下肢的任意运动,在躯体的平衡作用下,实现了步行周期1.3秒,步幅30厘米的平地动态步行。
法国Poitiers大学力学实验室和国立信息与自动化研究所INRIA机构共同开发了一种具有15个自由度的双足步行机器人BIP2000,其目的是建立一整套具有适应未知条件行走的双足机器人系统。
它们采用分层递解控制结构,使双足机器人实现站立、行走、爬坡和上下楼梯等。
此外,英国、苏联、南斯拉夫、加拿大、意大利、德国、韩国等国家,许多学者在行走机器人方面也做出了许多工作。
国内双足机器人的研制工作起步较晚。
两足步行机器人设计说明书姓名:学号:班级:指导老师:2012年6月目录第1章问题的提出 (1)1.1设计背景 (1)1.2课题的研究意义与应用前景 (1)1.3主要设计思想 (2)第2章设计要求与设计数据 (2)2.1高度的设置 (2)2.2自由度的设置 (4)2.3各关节活动范围的确定 (6)2.3.1髋关节的运动 (6)2.3.2膝关节的运动 (6)2.3.3踝关节的运动 (6)2.4关节驱动方式的选择 (7)第3章机构选型设计 (7)3.1两足步行机器人机构设计 (7)3.1.1腿部机构设计简图: (7)3.1.2手臂机构设计 (13)3.2设计方案的评价与选择 (13)3.2.1 腿部方案的评价与选择 (13)3.2.2手臂方案的评价与选择 (15)第4章机构尺度综合 (15)4.1凸轮的尺寸设计 (15)4.1.1臀部凸轮设计 (15)4.1.2膝关节凸轮设计 (20)4.2平面连杆机构的尺寸设计 (24)4.2.1手臂平面连杆机构运动规律分析 (24)4.2.2手臂平面连杆机构尺寸设计与计算 (25)第5章机构运动及动力分析 (27)5.1动态静力分析............................................................................................................. 错误!未定义书签。
5.2运动仿真分析集成 (28)5.2.1脚尖分析 (29)5.2.2手臂分析 (34)第6章结论 (36)6.1两足步行机器人机构特点 (36)6.2设计的主要特点 (37)6.3设计结果 (37)第7章收获与体会 (38)第8章致谢 (39)参考文献 (39)附录1 (40)附录二 (61)附录三 (63)第1章问题的提出1.1设计背景类人机器人一直是机器人领域的研究热点,是目前科技发展最活跃的领域之一。
0 引言目前,智能机器人领域的发展呈现多元化、智能化等趋势,机器人产业得到极大发展,各种可移动机器人陆续被研制出来协助人们的生产和生活,使用移动机器人替代人类在各领域工作的研究也吸引了诸多学者的关注 [1]。
按照移动机器人结构的不同,可将其分为轮式、腿式、履带式机器人等[2]。
面对较为复杂的路面,传统的依靠单一移动模式的机器人逐渐难以满足需求。
因此,复合式地面移动机器人成为重点研究热点[3]。
目前,轮腿式结构主要有3种,轮子安装在机器人腿的末端,轮腿步态转换依靠末端轮子的收放;轮子与机器人腿结构分开,轮腿步态转换依靠各机构独自运行[4];轮腿混合机构,该机构具有轮式与腿式机器人的部分特征,轮腿步态不严格区分。
这3种轮腿机器人结构提高了机器人在非结构特种环境下的运动性能。
轮腿式机器人兼具轮式机器人的快速性、平稳性以及腿式机器人的高越障性,可以随外界环境调整自己的运动姿态,已经成为移动机器人领域一个充满活力、具有挑战性的前沿发展方向[5]。
本文设计了一种多功能、可实现构型切换、可搭载末端夹取装置的轮腿式机器人,该轮腿机器人拥有4条肢体,每条肢体都是由关节模块和碳纤维连接板组成的三自由度机械腿,通过仿真和试验分析来验证其稳定性。
1 机器人机械结构设计1.1 躯体结构设计轮腿机器人躯体部分主要由碳纤维板和亚克力板构成,在机壳前端头部安装有双目相机,在后端装有躯体轮;躯体内部布置有电池组、上位机和下轮腿式机器人运动学分析及其步态规划陈耀轩1 周子尧1 王峥宇1 梅 杰1,2 陈 昆1,21武汉理工大学交通与物流工程学院 武汉 430063 2武汉理工大学智能制造与控制研究所 武汉 430063摘 要:文中提出了一种可实现构型切换的轮腿式机器人,能根据地形的不同切换为不同的构型,且前腿末端可与夹取装置相结合,能够通过变换姿态构型将前腿用作机械臂,通过配合前臂关节与末端夹取装置协调运动以实现远程代替人工进行作业的功能;对轮腿机器人在运动过程中进行单腿的正/逆运动学分析;对轮腿机器人进行了CPG步态规划和可操作性仿真分析。