一种基于计算机视觉的低成本室内空间测量系统设计与实现
- 格式:pdf
- 大小:304.16 KB
- 文档页数:4
高精度室内定位技术-UWB高精度室内定位技术-UWB先来了解一下定位是怎么工作的。
定位的核心技术其实是测距。
给定空间中已知三点的具体坐标,和一个未知点到三点的距离,即可算出未知点的坐标。
这通常叫做三边测量定位算法。
三边测量定位的几何理解非常简单。
以三个已知点和距离作三个圆,他们交于同一个点,这个点的坐标就是测量点的坐标。
然而这是一个理想情况,实际由于测量精度的限制,实际上他们通常交不到一个点上,交出来的是一块有面积的东西。
这块面积的大小就是定位精度。
当然我们可以通过更多组的测量使得相交的面积进一步减小以提高精度。
在这样简单易行的算法的支持下,我们就将定位问题转化为了测直线距离问题,如何精确计算一个已知点到未知点的距离。
GPS的解决方案非常简单粗暴。
GPS的本质是一个授时系统,也就是告诉你卫星发出这个信号的时候是几点几分几秒几毫秒几微秒。
而从GPS到地面有一定距离,无线电波在空气中以光速传播,等传到终端上是已经过去了几微秒,所以我们只要乘上光速就能知道终端到这颗星的距离了。
一个要克服的问题是终端的时间并不一定很精确,但如果我们可以通过几颗星之间两两差值来算出本地应该有的时间。
通过十几颗星一起授时进行修正,最后能很好将精度控制住。
提高精度的方法也很粗暴,提高授时精度即可。
这样的模型放在室内定位的时候会遇到什么问题呢?1、距离太短,时间难测。
由于室内定位距离太短,要知道光速是299,792,458 m/s,跑几米的时间太短了,根本测不精准。
所以如果想继续通过授时的方法解决问题,无线电波通常是不靠谱的。
当然也不是没有解决方案,比如速度慢得多的声波,一个解决方案就是超声波定位,这个可以是主动等回波来测量,或者被动授时测量,但超声波受多径效应和非视距传播影响很大,设计起来非常捉急。
2、信号遮挡,波长难选。
同样无论用超声还是无线电都会遇到这个问题。
波长长了,能绕过障碍物,但接收很困难,毕竟手机上不能捆个大锅盖(绕过障碍物=绕过终端设备)。
室内定位几种算法概述一.室内定位目的和意义随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。
但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的定位技术目前还无法很好地利用。
因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。
这些室内定位技术从总体上可归纳为几类,即GNSS技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。
由于在室内环境下对于不同的建筑物而言,室内布置,材料结构,建筑物尺度的不同导致了信号的路径损耗很大,与此同时,建筑物的内在结构会引起信号的反射,绕射,折射和散射,形成多径现象,使得接收信号的幅度,相位和到达时间发生变化,造成信号的损失,定位的难度大。
虽然室内定位是定位技术的一种,和室外的无线定位技术相比有一定的共性,但是室内环境的复杂性和对定位精度和安全性的特殊要求,使得室内无线定位技术有着不同于普通定位系统的鲜明特点,而且这些特点是户外定位技术所不具备的。
因此,两者区域的标识和划分标准是不同的。
基于室内定位的诸多特点,室内定位技术和定位算法已成为各国科技工作者研究的热点。
如何提高定位精度仍将是今后研究的重点。
二. 室内定位技术的国内外发展趋势室内GPS定位技术GPS是目前应用最为广泛的定位技术。
当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减,定位精度也很低,要想达到室外一样直接从卫星广播中提取导航数据和时间信息是不可能的。
无线传感器网络中定位跟踪技术的研究一、概述无线传感器网络(WSN)作为一种分布式、自组织的网络系统,近年来在各个领域得到了广泛的应用,尤其在定位跟踪技术方面展现出了巨大的潜力。
定位跟踪技术是通过无线传感器节点之间的协作,实现对目标对象的位置信息获取和动态跟踪的关键技术。
在环境监测、智能农业、军事侦察、灾难救援等众多场景中,定位跟踪技术都发挥着不可替代的作用。
随着无线传感器网络技术的不断发展,定位跟踪技术的精度和稳定性得到了显著提升。
传统的定位方法如GPS等虽然具有较高的定位精度,但在某些特殊环境下如室内、地下等区域,其定位效果并不理想。
而无线传感器网络中的定位跟踪技术,通过结合多个传感器节点的信息,能够实现对目标对象的精确定位和实时跟踪。
无线传感器网络中的定位跟踪技术已经取得了丰富的研究成果,包括基于测距的定位算法、无需测距的定位算法、移动目标跟踪算法等。
这些算法在不同的应用场景中展现出了各自的优势和特点,为无线传感器网络的定位跟踪提供了有效的解决方案。
无线传感器网络中的定位跟踪技术仍面临一些挑战和问题。
如何进一步提高定位精度和稳定性、如何降低节点能耗以延长网络寿命、如何优化网络通信以提高数据传输效率等。
这些问题需要我们在未来的研究中不断探索和创新,以推动无线传感器网络中定位跟踪技术的进一步发展。
无线传感器网络中的定位跟踪技术是一项具有广阔应用前景和重要意义的研究领域。
通过深入研究和创新,我们可以不断提高定位跟踪技术的性能和应用效果,为各个领域的发展提供有力支持。
1. 无线传感器网络的概念与特点无线传感器网络(Wireless Sensor Networks,WSN)是一种由大量低功耗、低成本、微型化的传感器节点通过无线通信技术相互连接而成的自组织网络系统。
这些传感器节点被部署在监测区域内,能够实时感知并收集环境信息,如温度、湿度、光照、压力等,并通过多跳转发的方式将数据传输至汇聚节点,进而实现信息的集中处理和应用。
基于深度学习的人体动作识别与分析系统设计与实现人体动作识别与分析是计算机视觉和深度学习领域的一个关键问题,在很多应用中都具有重要价值,如运动监测、人机交互以及健康状况监测等。
本文将介绍基于深度学习的人体动作识别与分析系统的设计与实现。
一、引言人体动作识别与分析旨在通过对人体运动的识别和分析,从运动数据中提取有用的信息和模式。
传统的人体动作分析方法主要依赖于手动设计的特征和分类器,这些方法在复杂场景下表现出局限性。
而深度学习技术的发展为人体动作识别与分析提供了新的解决方案。
二、系统设计基于深度学习的人体动作识别与分析系统的设计主要包括数据采集、数据预处理、特征提取、动作识别和结果分析等步骤。
1. 数据采集在系统设计中,数据采集是一个重要的环节。
为了收集准确的数据,可以利用传感器设备如摄像头、加速度计等,对人体运动进行捕捉和测量。
数据采集过程中要保持足够的场景光照和运动自然性,以获取真实的人体动作数据。
2. 数据预处理数据预处理是为了提高数据质量和降低数据维度。
常用的预处理方法包括数据平滑、滤波、姿态校准等。
通过预处理可以减少噪声干扰,提高后续分析的准确性。
3. 特征提取特征提取是人体动作识别与分析的核心步骤之一。
深度学习中常用的特征提取方法包括卷积神经网络(CNN)和循环神经网络(RNN)。
CNN主要用于提取二维图像数据中的空间特征,而RNN则用于提取时序特征。
通过深度学习模型的训练,可以从原始数据中自动地学习和提取关键特征。
4. 动作识别动作识别是人体动作识别与分析系统的核心任务。
通过构建深度学习模型,将提取到的特征输入到模型中进行训练和识别。
常用的深度学习模型包括卷积神经网络(CNN)、长短时记忆网络(LSTM)以及双向循环神经网络(BiRNN)等。
这些模型可以对人体动作进行分类和识别,并输出相应的结果。
5. 结果分析在动作识别之后,系统需要对识别结果进行分析和处理。
可以通过统计分析、数据可视化等手段,对识别结果进行可视化展示和评估。
汽车制动性能检测仪的设计与实现的开题报告一、选题背景及意义随着汽车技术的不断进步,现代汽车的性能越来越强,而制动系统作为汽车安全性的重要组成部分,其性能得到了很大程度的提升。
为了保障汽车行驶的安全性,制动系统的性能检测越来越受到重视。
然而目前国内市场上的汽车制动性能检测设备多为进口设备,价格昂贵、且普及程度不高,给一些小型车维修厂和个人抢修带来了很大的经济压力。
因此,本文将研究和实现一种低成本的汽车制动性能检测仪,以解决上述问题。
二、文献综述目前国内外针对汽车制动性能检测的研究文章较多,其中包括了制动性能检测的原理研究以及制动性能检测设备的设计和研制。
在国外,Soffiatti等人(2020)研发了一种全新的光学测量方法,该方法利用两个光纤光栅测量小时变形,从而推导出刹车压力与多个指标的关系。
相比其他制动试验仪,这种设备具有较高的精度和灵敏度,并且不易受到车辆不同工作条件和使用寿命的影响。
另外,也出现了一些基于计算机视觉和深度学习的制动性能检测方法,如Sari等人(2020)提出的一种基于卷积神经网络的制动系统检测模型。
在模型训练和测试阶段,该模型可对车辆从行驶状态到紧急停车时的制动性能进行准确的评估。
在国内,韩等人(2019)基于MATLAB平台实现了一种传统的汽车制动性能检测仪。
该设计基于大多数轿车的制动系统原理,主要包括刹车踏板、压力传感器、转速传感器、温度传感器和控制器。
该检测仪可定量分析汽车制动压力、制动力和转速变化,评估制动性能的整体水平。
但是该设备由于采用传统的物理量测量方式,灵敏度不够高,且易受到环境因素的干扰。
三、研究方案本设计的重点是研发一种基于计算机视觉的制动性能检测仪。
检测仪由图像采集模块、图像处理模块、数据分析处理模块和显示模块四个部分组成。
具体方案如下:1.图像采集模块采用高清晰度CCD摄像头,拍摄卡车或小轿车的车轮区域,提供包括车轮转动速度、刹车片受力面积、减速度等参数。
一种摄像模组位姿精确测量的方法5篇第1篇示例:摄像模组是指嵌入在摄像设备中用于捕捉图像的部件,常见于手机、摄像机、监控摄像头等设备中。
在实际的应用中,我们常常需要对摄像模组的位姿进行精确测量,以确保拍摄到的图像具有准确的信息和画面效果。
本文将介绍一种基于计算机视觉技术的摄像模组位姿精确测量方法。
一、背景介绍在传统的摄像模组位姿测量方法中,通常需要使用专门的测量设备和复杂的测量程序。
这种方法存在操作繁琐、成本高昂等问题,限制了位姿测量的准确性和效率。
而基于计算机视觉技术的位姿测量方法则具有操作简便、成本低廉、测量精度高等优点,逐渐成为研究和应用的热点。
二、基于计算机视觉技术的摄像模组位姿精确测量方法1.建立视觉模型我们需要在计算机中建立摄像模组的视觉模型。
这一步通常包括图像采集、特征提取、特征匹配等操作。
通过对模型的建立,我们可以获取摄像模组的外部特征信息,为后续的位姿测量提供基础数据。
2.位姿估计在建立好视觉模型后,我们利用计算机视觉技术对摄像模组的位姿进行估计。
这一步通常采用3D-2D对应或3D-3D对应等方法,通过已知的摄像模组特征信息和位置信息,推导出其位姿参数。
常用的位姿估计算法包括EPnP算法、PnP算法等。
3.误差校正位姿估计过程中常常存在误差,因此我们需要对位姿进行误差校正。
误差校正通常包括重投影误差最小化、迭代最近点算法等方法,通过减小误差提高位姿测量的准确性。
4.精度评估我们需要对位姿测量结果进行精度评估。
通过对比测量结果与真实值的差异,评估位姿测量的准确性和可靠性。
常用的精度评估方法包括平均绝对误差、标准差等。
三、应用场景与前景展望基于计算机视觉技术的摄像模组位姿精确测量方法在工业制造、智能交通、虚拟现实等领域具有广泛的应用前景。
在工业制造中,可以利用该方法对机器人、自动化生产线等设备的姿态进行精确控制,提高生产效率和产品质量。
在智能交通领域,可以利用该方法对车辆、行人等目标的位置进行实时监测和跟踪,提高交通安全性和管理效率。
基于机器视觉的颜色识别系统设计1. 引言1.1 背景介绍颜色在人类生活中占据着重要地位,它不仅是视觉的基础,也在很多领域扮演着重要的角色,比如服装设计、广告营销、交通信号等。
随着科技的不断发展,机器视觉技术已经成为了一个热门的研究领域,其在颜色识别方面的应用也受到了越来越多的关注。
传统的颜色识别方法往往需要人为参与,而且容易受到外界光线、材质等因素的影响,导致识别的准确性和稳定性较低。
基于机器视觉的颜色识别系统能够有效地解决这些问题,其利用计算机视觉技术实现对颜色的自动识别,不仅提高了识别的精度和速度,也扩大了应用领域。
本研究旨在设计一种基于机器视觉的颜色识别系统,通过分析颜色模型、提取颜色特征等方法,实现对不同颜色的准确识别。
这对于促进机器视觉技术的发展,提高颜色识别系统的实用性和普适性具有重要的意义。
1.2 研究意义颜色在人类生活中起着重要的作用,它不仅是视觉感知的基本元素,还与情感、文化和认知有着密切的关系。
随着智能技术的发展和普及,基于机器视觉的颜色识别系统成为了一个备受关注的研究领域。
其在工业生产、智能交通、医疗诊断等领域都具有重要的应用前景。
研究颜色识别技术不仅可以提高生产效率和质量控制水平,还可以为人们的生活带来更多的便利。
基于颜色识别的智能交通系统可以实现智能化的车辆识别和信号控制,从而提升交通效率和安全性。
颜色识别技术在医疗影像诊断和人脸识别等领域也具有重要的应用潜力。
通过深入研究和设计基于机器视觉的颜色识别系统,可以探索颜色信息的提取和应用方法,推动人工智能技术在实际生产和生活中的应用,促进智能化社会的建设和发展。
研究基于机器视觉的颜色识别系统具有重要的理论和应用意义。
1.3 研究目的研究目的旨在通过基于机器视觉的颜色识别系统设计,实现对不同颜色的准确识别和分类。
具体目的包括但不限于:提高颜色识别的准确性和速度,拓展机器视觉在颜色识别领域的应用前景,促进机器视觉技术在智能设备、自动化生产、智能交通等领域的进一步发展,为实现智能化、信息化社会做出贡献。
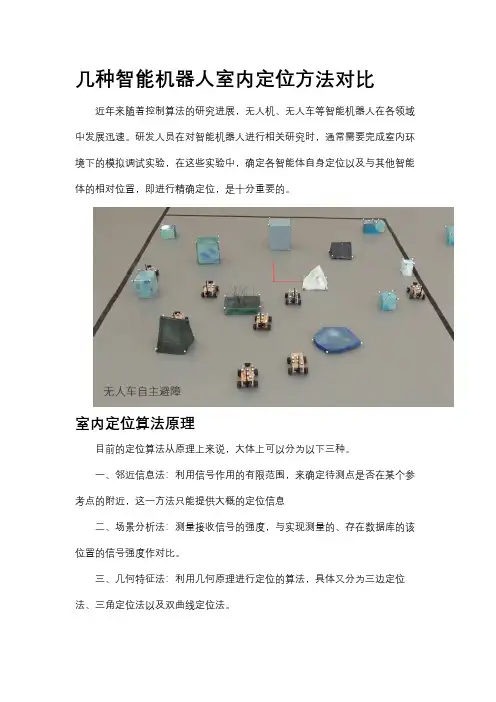
几种智能机器人室内定位方法对比近年来随着控制算法的研究进展,无人机、无人车等智能机器人在各领域中发展迅速。
研发人员在对智能机器人进行相关研究时,通常需要完成室内环境下的模拟调试实验,在这些实验中,确定各智能体自身定位以及与其他智能体的相对位置,即进行精确定位,是十分重要的。
室内定位算法原理目前的定位算法从原理上来说,大体上可以分为以下三种。
一、邻近信息法:利用信号作用的有限范围,来确定待测点是否在某个参考点的附近,这一方法只能提供大概的定位信息二、场景分析法:测量接收信号的强度,与实现测量的、存在数据库的该位置的信号强度作对比。
三、几何特征法:利用几何原理进行定位的算法,具体又分为三边定位法、三角定位法以及双曲线定位法。
根据上面介绍的定位算法,衍生出了多种室内定位技术。
目前的定位技术多要借助辅助节点进行定位,通过不同的测距方式计算出待测节点相对于辅助节点的位置,然后与数据库中事先收集的数据进行比对,从而确定当前位置。
室内定位主要流程为首先在室内环境设置固定位置的辅助节点,这些节点的位置已知,有的位置信息是直接存在节点中,如射频识别(RFID)的标签,有的是存在电脑终端的数据库中,如红外线、超声波等。
然后测量待测节点到辅助节点的距离,从而确定相对位置,使用某种方式进行测距通常需要一对发射和接收设备,按照发射机和接收机的位置大体可以分为两种:一种是发射机位于被测节点,接收机位于辅助节点,例如红外线,超声波和射频识别(RFID);另一种是发射机位于辅助节点,接收机位于被测节点,例如WiFi、超宽带(UWB)、ZigBee。
室内定位技术对比下面具体介绍八种室内定位技术所涉及原理与优缺点。
一、WiFi定位技术,定位方法是场景分析法,其定位精度由于覆盖范围的不同,可以达到2-50m。
优点是易安装、系统总精度相对较高,缺点是指纹信息收集量大、易受其他信号干扰。
二、视频识别(RFID)技术,定位方法是临近信息法,其定位精度在5cm-5m之间。
硕士学位论文单目视觉实时测距算法研究RESEARCH ON MONOCULAR VISION-BASED REALTIME DISTANCE MEASUREMENTALGORITHM李强哈尔滨工业大学2014年12月国内图书分类号:TP242.6 学校代码:10213 国际图书分类号:621.3 密级:公开工学硕士学位论文单目视觉实时测距算法研究硕士研究生李强导师张乃通院士申请学位工学硕士学科信息与通信工程所在单位深圳研究生院答辩日期2014年12月授予学位单位哈尔滨工业大学Classified Index: TP242.6U.D.C: 621.3Dissertation for the Master Degree in EngineeringRESEARCH ON MONOCULAR VISION-BASED REALTIME DISTANCE MEASUREMENTALGORITHMCandidate:Li QiangSupervisor:Academician Zhang Naitong Academic Degree Applied for:Master of Engineering Speciality:Information and CommunicationEngineeringAffiliation:Shenzhen Graduate School Date of Defence:December, 2014Degree-Conferring-Institution:Harbin Institute of Technology摘要视觉可以帮助人类粗略的感知外界环境中的事物与自身之间的距离,从而进行适当的避让,但对于机器人来说,因其自身软硬件的条件约束,是很难像人类一样高效的利用视觉进行导航的,而视觉导航(尤其是单目视觉)相对于传统的利用传感器进行导航的方式,其在低成本、实时性以及高精确度等方面表现出来的优势增加了它的研究价值。
单目摄像机激光测距传感器位姿测量系统1. 本文概述本文主要研究了一种基于单目摄像机和激光测距传感器的位姿测量系统。
在单目视觉测量中,由于模型自身的限制,沿摄像机光轴方向上的位移测量精度通常远低于垂直光轴方向上的位移测量精度。
为了解决这个问题,本文提出了在沿摄像机光轴方向上加装一个高精度的激光测距传感器,以提高系统在沿摄像机光轴方向上的位移测量精度。
通过将单目摄像机和激光测距传感器相结合,利用激光测距传感器的高精度测距数据,可以实现对目标物体的精确位姿测量。
本文还对该系统的工作原理、参数标定以及数据融合等方面进行了详细的理论推导和实验研究,实验结果证明了该系统的可行性和有效性。
这一系统在光学测量、位姿测量等领域具有广泛的应用前景。
2. 单目视觉位姿测量在沿光轴方向上位移测量精度低的原因分析尺度不确定性:单目视觉系统在没有额外信息的情况下,无法直接测量物体的绝对尺度。
这意味着,对于沿光轴方向的位移,系统无法直接确定物体移动的实际距离,从而导致测量精度降低。
深度信息的依赖性:单目视觉系统通常需要通过立体匹配、光流估计或基于深度学习的深度估计方法来获取深度信息。
这些方法在沿光轴方向上的性能通常不如在其他方向上,因为沿光轴方向的像素变化较小,难以提取有效的深度线索。
相机内参和外参的标定误差:相机的内参(焦距、主点坐标等)和外参(旋转矩阵和平移向量)对于位姿测量至关重要。
如果标定过程中存在误差,这些误差将会在沿光轴方向的位移测量中被放大,因为该方向对这些参数的变化更为敏感。
环境因素:在实际应用中,光照变化、反射、遮挡等环境因素都可能影响单目视觉系统的性能。
沿光轴方向的位移测量更容易受到这些因素的影响,因为物体在该方向上的移动可能导致图像中的特征点数量减少或质量下降。
图像分辨率和传感器噪声:图像的分辨率和传感器的噪声水平也会影响位移测量的精度。
低分辨率的图像或高噪声的传感器会使得沿光轴方向的特征点检测和跟踪变得更加困难。