图像处理中的正则化
- 格式:doc
- 大小:215.33 KB
- 文档页数:6
投影复原方法的原理与应用一、引言投影复原方法是一种将模糊或失真的图像恢复为清晰、可识别的图像的技术。
本文将介绍投影复原方法的原理及其在图像处理、医学影像、安全监控等领域的应用。
二、原理投影复原方法基于图像模糊的成因,通过图像处理的方式减少或消除图像模糊的影响,从而提高图像的清晰度和质量。
其原理主要包括以下几个方面:2.1 PSF模型投影复原方法将图像的模糊问题看作是由点扩散函数(PSF)引起的。
PSF模型描述了光线在传播过程中因光学系统的限制而引起的图像模糊。
通过对PSF进行建模,可以理解图像模糊的原因,并进一步进行复原处理。
2.2 反卷积反卷积是投影复原方法的核心操作,其目标是通过运用逆滤波器或最小二乘法等数学方法,尽可能地将图像在传播过程中引起的失真恢复到原始图像。
通过卷积定理,可以将时域的卷积问题转化为频域的乘法问题,从而加速复原过程。
2.3 正则化技术为了增强反卷积的稳定性和泛化能力,投影复原方法引入了正则化技术。
正则化技术基于约束条件,通过在反卷积过程中添加先验知识或假设,避免过拟合和噪声放大等问题。
常见的正则化技术包括Tikhonov正则化、最小二乘正则化等。
三、应用投影复原方法在多个领域都有广泛的应用,以下是一些典型的应用场景:3.1 图像处理在数字图像处理中,投影复原方法可以用于图像去模糊、边缘增强、图像恢复等任务。
例如,在遥感图像处理中,投影复原方法可以恢复受大气、云雾等因素影响的图像,提高图像的清晰度和可用性。
3.2 医学影像在医学影像领域,投影复原方法可以用于医学图像的增强和去噪。
例如,对于X射线、CT、MRI等医学影像,投影复原方法可以消除因传感器噪声、运动伪影等因素而引起的图像模糊和失真,提高医生对疾病的诊断精度。
3.3 安全监控投影复原方法还可以应用于安全监控领域。
例如,在视频监控中,由于摄像头移动或目标物体运动造成的图像模糊,可以通过投影复原方法来恢复原始图像中的目标,提高监控的效果和准确性。

L曲线(L-curve)是一种在图像处理、优化等领域中常见的曲线。
它的名字来源于其形状类似于英文字母“L”。
在数学和计算机视觉领域,L曲线经常用来描述正则化参数与误差之间的关系。
L曲线的表达式通常不是一个具体的数学公式,而是通过数据点绘制的曲线图。
在图像处理中,L曲线通常用于表示图像恢复或去噪过程中,正则化参数与数据保真度(如均方误差)之间的关系。
随着正则化参数的增加,数据保真度逐渐降低,而图像的平滑度或简洁度逐渐增加。
L曲线的拐点通常被认为是最佳正则化参数的选择点,因为它在数据保真度和模型复杂度之间达到了一个平衡。
在优化问题中,L曲线也可以表示模型的复杂度和训练误差之间的关系。
随着模型复杂度的增加,训练误差逐渐减小,但模型的泛化能力可能下降。
通过L曲线,可以找到模型复杂度和泛化性能之间的平衡点。
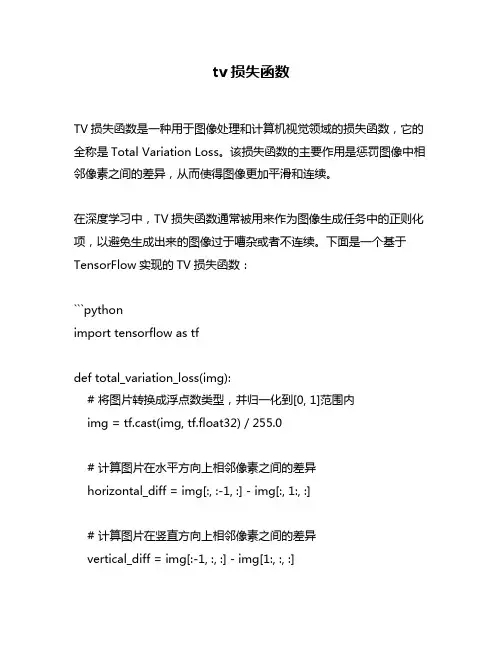
tv损失函数TV损失函数是一种用于图像处理和计算机视觉领域的损失函数,它的全称是Total Variation Loss。
该损失函数的主要作用是惩罚图像中相邻像素之间的差异,从而使得图像更加平滑和连续。
在深度学习中,TV损失函数通常被用来作为图像生成任务中的正则化项,以避免生成出来的图像过于嘈杂或者不连续。
下面是一个基于TensorFlow实现的TV损失函数:```pythonimport tensorflow as tfdef total_variation_loss(img):# 将图片转换成浮点数类型,并归一化到[0, 1]范围内img = tf.cast(img, tf.float32) / 255.0# 计算图片在水平方向上相邻像素之间的差异horizontal_diff = img[:, :-1, :] - img[:, 1:, :]# 计算图片在竖直方向上相邻像素之间的差异vertical_diff = img[:-1, :, :] - img[1:, :, :]# 计算水平方向和竖直方向上相邻像素之间差异的平方和,并取均值loss = tf.reduce_mean(tf.square(horizontal_diff)) +tf.reduce_mean(tf.square(vertical_diff))return loss```上述代码中,首先将输入图片转换成浮点数类型,并归一化到[0, 1]范围内。
然后,分别计算图片在水平方向和竖直方向上相邻像素之间的差异,最后将两者的平方和取均值作为TV损失函数的值。
使用该函数时,只需要将需要计算TV损失函数的图片作为输入参数传入即可。
例如:```pythonimport numpy as npfrom PIL import Image# 加载一张图片img = np.array(Image.open('example.jpg'))# 计算该图片的TV损失函数值loss = total_variation_loss(img)print(loss)```上述代码中,首先加载了一张名为example.jpg的图片,并将其转换成numpy数组格式。
如何解决图像识别中的模型过拟合问题在图像识别领域,深度学习模型已经取得了显著的进展。
然而,随着模型变得越来越复杂,过拟合问题也日益凸显。
过拟合是指模型在训练数据上表现得很好,但在测试数据上表现较差的现象。
本文将讨论几种解决图像识别中模型过拟合问题的方法。
1. 数据增强数据增强是一种经典的解决过拟合问题的方法。
通过对训练数据进行一系列的随机变换,如旋转、平移、缩放和翻转等操作,可以生成更多的训练样本。
这样可以使模型更好地泛化,减少过拟合。
此外,还可以使用一些图像处理技术,如模糊、锐化或添加噪声等手段,进一步增加数据的多样性。
数据增强在一定程度上平衡了模型对各种变换的鲁棒性。
2. 权重正则化权重正则化是通过对损失函数引入正则项来限制模型的复杂度,进而减少过拟合。
常用的正则项包括L1正则化和L2正则化。
在卷积神经网络中,通常将L2正则化应用于权重矩阵,即将权重矩阵的平方和乘以一个较小的正则化参数,并加到损失函数中。
这样可以使得模型倾向于学习较为简单的特征,从而减少过拟合的风险。
3. DropoutDropout是一种常用的正则化技术,通过在训练过程中随机丢弃一部分神经元的输出,从而减少不同神经元之间的依赖性,增强模型的泛化能力。
具体而言,当进行某一层的前向传播计算时,随机选择一部分神经元将它们的输出设为0,这样可以避免某些特定的特征依赖于固定的神经元。
通过每次迭代时随机选择不同的神经元,模型可以学习到更多的互补特征,有效缓解模型过拟合问题。
4. 提前停止提前停止是一种简单但有效的方式来应对模型过拟合。
通过在训练中定期评估验证集的性能,并比较前后两次性能的变化来判断模型是否已经过拟合。
当验证集的性能不再改善时,及时停止训练,可以有效避免模型在后期过拟合。
这种方法的关键是要找到合适的停止点,防止欠拟合和过拟合的发生。
5. 模型集成模型集成是一种将多个模型的预测结果进行合并的方法。
通过训练并结合多个不同的模型,可以减少每个模型的过拟合风险。
图像识别方法及图像识别模型的训练方法在当今数字化的时代,图像识别技术已经成为了一项至关重要的技术。
它在众多领域都有着广泛的应用,如安防监控、自动驾驶、医疗诊断、工业检测等等。
那么,图像识别到底是如何实现的呢?这就涉及到图像识别方法以及图像识别模型的训练方法。
首先,我们来了解一下图像识别的基本方法。
图像识别的核心思想是从图像中提取出有价值的特征,并利用这些特征来对图像进行分类或识别。
一种常见的方法是基于传统的图像处理技术。
这包括对图像进行灰度化、二值化、滤波、边缘检测等操作,以提取图像的基本形状、纹理等特征。
例如,通过边缘检测算法,可以找出图像中物体的轮廓;通过纹理分析,可以判断图像中的材质。
另一种重要的方法是基于深度学习的技术。
深度学习中的卷积神经网络(CNN)在图像识别中取得了巨大的成功。
CNN 能够自动从大量的图像数据中学习到有效的特征表示。
它通过一系列的卷积层、池化层和全连接层来对图像进行处理。
卷积层用于提取局部特征,池化层用于降低特征维度,全连接层则用于最终的分类或识别。
在实际应用中,还会结合多种方法来提高图像识别的效果。
比如,先使用传统的图像处理方法对图像进行预处理,去除噪声、增强对比度等,然后再将处理后的图像输入到深度学习模型中进行识别。
接下来,我们探讨一下图像识别模型的训练方法。
数据准备是训练图像识别模型的第一步。
需要收集大量的图像数据,并对这些数据进行标注,即标记出图像中的目标类别。
数据的质量和数量对模型的训练效果有着至关重要的影响。
为了增加数据的多样性,可以对原始数据进行数据增强操作,如翻转、旋转、缩放、裁剪等。
选择合适的模型架构是关键的一步。
对于图像识别任务,常见的模型架构如 VGG、ResNet、Inception 等都表现出色。
这些架构在不同的应用场景中可能会有不同的效果,需要根据具体问题进行选择和调整。
在训练过程中,需要设置合适的超参数,如学习率、迭代次数、正则化参数等。
平均正则化的功率谱密度一、基本概念平均正则化的功率谱密度是一种用于信号处理和相关领域的重要概念。
简单来说,功率谱密度(Power Spectral Density,PSD)描述了一个随机信号的能量分布情况,即在不同的频率下单位带宽内信号的功率。
平均正则化是对一组数据进行正则化处理,使得其总体分布更为均匀,从而在一定程度上消除数据中的异常值和偏态现象。
二、计算方法平均正则化的功率谱密度的计算方法主要包括以下几个步骤:.收集信号数据:首先需要收集待处理的信号数据。
这些数据可以是时间序列、频域数据等。
.数据预处理:对收集到的数据进行清洗、去噪等预处理操作,以确保数据的准确性和可靠性。
.计算功率谱密度:利用适当的算法计算信号的功率谱密度。
常用的算法包括短时傅里叶变换(Short-Time Fourier Transform,STFT)、小波变换(Wavelet Transform)等。
.平均正则化处理:对计算得到的功率谱密度数据进行平均正则化处理。
具体来说,就是将数据按照一定的规则进行分组,然后对每组数据进行加权平均,以得到更加平滑和稳健的结果。
常用的平均方法包括算术平均、几何平均等。
.结果分析:根据处理后的功率谱密度数据进行进一步的分析和处理,如频率特征提取、谱相关分析等。
三、应用场景平均正则化的功率谱密度在许多领域都有广泛的应用,主要包括以下几个方面:.通信系统:在通信系统中,信号的功率谱密度是一个重要的指标,直接关系到通信的质量和效率。
通过应用平均正则化的功率谱密度方法,可以对通信信号的能量分布进行更为准确的分析和评估。
.声音处理:在声音处理领域,平均正则化的功率谱密度可用于分析语音、音乐等音频信号的特征,如音色、音高等。
通过对音频信号的功率谱密度进行平均正则化处理,可以得到更加清晰和准确的音频特征。
.图像处理:在图像处理领域,平均正则化的功率谱密度可用于分析图像的频率特征和纹理特征。
通过对图像进行傅里叶变换,得到图像的功率谱密度,再对其进行平均正则化处理,可以得到更为清晰和准确的图像特征。
最优化算法在图像处理中的应用图像处理是计算机视觉领域的重要研究方向,其目标是通过对图像进行分析和处理,提取出有用的信息。
最优化算法是一类重要的数学工具,它能够帮助我们在给定的约束条件下,找到最优的解决方案。
在图像处理中,最优化算法被广泛应用于图像恢复、图像分割、图像压缩等方面,为图像处理提供了强大的支持。
一、图像恢复图像恢复是指通过对图像进行处理,消除图像中的噪声、模糊和失真等问题,使图像更加清晰和真实。
最优化算法在图像恢复中发挥了重要作用。
例如,基于最小二乘法的最优化算法可以通过最小化图像中的噪声和模糊对图像进行恢复。
此外,基于正则化的最优化算法也被广泛应用于图像恢复中,通过在目标函数中引入正则化项,平衡数据拟合和模型复杂度,提高图像恢复的效果。
二、图像分割图像分割是将图像划分成若干个具有独立特征的区域的过程。
最优化算法在图像分割中具有重要的应用价值。
例如,基于能量最小化的最优化算法可以通过最小化图像中的能量函数,将图像分割成具有相似特征的区域。
此外,基于图割算法的最优化算法也被广泛应用于图像分割中,通过将图像分割问题转化为最小割问题,实现图像的自动分割。
三、图像压缩图像压缩是通过减少图像数据的冗余性,实现对图像数据的压缩存储。
最优化算法在图像压缩中有着重要的应用。
例如,基于离散余弦变换的最优化算法可以通过最小化压缩后的图像与原始图像之间的误差,实现对图像的有损压缩。
此外,基于小波变换的最优化算法也被广泛应用于图像压缩中,通过最小化小波系数的能量,实现对图像的无损压缩。
四、图像识别图像识别是指通过对图像进行分析和处理,实现对图像中目标的自动识别和分类。
最优化算法在图像识别中也有着重要的应用。
例如,基于支持向量机的最优化算法可以通过最小化分类器的结构风险,实现对图像中目标的分类。
此外,基于神经网络的最优化算法也被广泛应用于图像识别中,通过最小化误差函数,实现对图像中目标的识别和分类。
综上所述,最优化算法在图像处理中发挥着重要的作用,为图像恢复、图像分割、图像压缩和图像识别等方面提供了强大的支持。
深度学习在图像识别中的常见问题解决方法一、简介图像识别是深度学习中的一个重要领域,其应用广泛涉及到人脸识别、物体检测和智能驾驶等多个领域。
在实际应用中,深度学习在图像识别中也面临着一些常见问题,如图像质量不佳、样本不平衡以及数据集过小等。
本文将针对这些问题进行讨论,并提供相应的解决方法。
二、图像质量不佳问题1. 问题描述在进行图像识别时,往往会遇到图像质量较差的情况。
例如,可能存在噪声干扰、光照条件差或者图像模糊等情况。
2. 解决方法为了解决图像质量不佳问题,我们可以采取以下几种方法:a) 数据增强:通过旋转、缩放和裁剪等操作增加数据集的多样性,并降低光照方向和强度变化带来的影响。
b) 噪声去除:利用滤波算法、去噪神经网络或者稀疏表示等技术减少图片中的噪声干扰。
c) 图片增益:调整图片亮度、对比度和颜色平衡等参数来改善图像质量。
三、样本不平衡问题1. 问题描述在图像识别任务中,往往会面临样本不平衡的问题。
具体来说,某些类别的样本数量较少,而另一些类别的样本数量较多。
2. 解决方法为了解决样本不平衡问题,我们可以考虑以下几种方法:a) 重采样:通过欠采样或者过采样等技术调整训练数据集中各类别的样本比例,使其更加均衡。
b) 类别权重:为每个类别分配不同的权重,在训练时调整损失函数,使得模型更关注于稀缺类别。
c) 数据合成:利用合成数据集、迁移学习或者生成对抗网络等方法增加少数类别的样本数量。
四、数据集过小问题1. 问题描述在深度学习中,一个常见的挑战是由于资源限制而导致的数据集过小。
当数据量较小时,模型容易产生过拟合现象。
2. 解决方法为了克服数据集过小带来的影响,我们可以采用以下策略:a) 迁移学习:通过预训练模型在大规模数据集上进行训练,然后再利用部分或全部参数来初始化目标任务的模型。
b) 数据增强:通过旋转、平移和缩放等操作扩充原始数据集,并增加样本的多样性。
c) 模型正则化:通过加入正则项如L1或L2范数限制参数的取值范围,减少过拟合风险。
改进的Tikhonov正则化图像重建算法温丽梅;周苗苗;李明;马敏【摘要】Tikhonov正则化法可以解决电容层析成像中图像重建的病态问题,同时能够平衡解的稳定性与精确性,但其有效性和成像质量受到测量数据粗差的影响.改进的Tikhonov正则化法将2范数和M-估计结合,用一个缓慢增长的Cauchy函数代替最小二乘法的平方和函数,提高了估计稳健性和适应性.利用COMSOL和MATLAB软件对方法的有效性进行验证,重建结果表明,改进的Tikhonov正则化法能够有效减少粗差影响,提高重建图像精确度及分辨率.【期刊名称】《计量学报》【年(卷),期】2018(039)005【总页数】5页(P679-683)【关键词】计量学;图像重建;Tikhonov正则化法;电容层析成像;尾气检测;多相流【作者】温丽梅;周苗苗;李明;马敏【作者单位】中国民航大学电子信息与自动化学院,天津300300;中国民航大学电子信息与自动化学院,天津300300;中国民航大学电子信息与自动化学院,天津300300;中国民航大学电子信息与自动化学院,天津300300【正文语种】中文【中图分类】TB9371 引言气-固两相流广泛存在于机械制造、电力、化工、制药等工业生产领域[1,2],其流动特性复杂,材料浓度的分布状态多变。
航空发动机尾喷管的尾气是一种特殊的多相流体,主要由未完全燃烧液滴、大量排放气体以及发动机内部零部件发生磨损、碰擦、侵蚀等产生的金属屑等组成。
若航空发动机处于不同的工作状态,其内部尾气所含介质成分也有所不同[3]。
飞机发生事故前,发动机尾气中多相流体的介质成分及分布状况会有较大变化,据此可以作为此类灾害的早期预警[4]。
层析成像技术[5,6]可以实现三维流场的多参数非侵入式连续在线测量,电容层析成像(electrical capacitance tomography, ECT)在飞机发动机尾气检测方面具有潜在的应用价值。
不适定问题的正则化方法及应用不适定问题的正则化方法及应用1. 引言在科学研究和工程领域,经常会遇到不适定问题(ill-posed problems)。
不适定问题是指在某些情况下,问题的解决方案可能不稳定或不唯一。
在处理这类问题时,正则化方法可以帮助我们找到稳定且有意义的解决方案。
本文将从不适定问题的概念和特点入手,探讨正则化方法的应用及意义。
2. 不适定问题的特点不适定问题通常具有以下特点:解可能不唯一、解可能不稳定、解可能对初始数据的微小变化非常敏感。
在图像恢复、信号处理、逆问题求解等领域,经常会遇到不适定问题。
针对这些问题,我们需要寻求合适的正则化方法来改善解的稳定性和唯一性。
3. 正则化方法的概念正则化方法是指在求解不适定问题时,通过引入额外的信息或约束条件,以限制解的空间,从而得到稳定且有意义的解。
常见的正则化方法包括Tikhonov正则化、Lasso正则化、Ridge回归等。
这些方法可以在一定程度上提高问题的适定性,从而避免不适定问题带来的困扰。
4. 正则化方法的应用在实际应用中,正则化方法被广泛应用于各种领域。
在医学影像重建中,通过引入正则化项,可以改善图像重建的质量;在机器学习领域,正则化方法可以避免过拟合,提高模型的泛化能力;在地球物理勘探中,正则化方法可以改善地下介质成像的稳定性。
可以说,正则化方法已成为处理不适定问题的重要工具。
5. 个人观点对于不适定问题,我认为正则化方法的应用是非常必要的。
它不仅可以帮助我们得到稳定的解决方案,还可以提供额外的信息来指导问题的求解。
在未来的研究和实践中,我希望能够更深入地探索不适定问题的正则化方法,在更多的领域发挥其作用。
6. 总结通过本文对不适定问题的正则化方法及应用的探讨,我们了解了不适定问题的特点和正则化方法的基本概念。
正则化方法在实际应用中发挥着重要作用,帮助我们处理不适定问题,得到稳定且有意义的解。
我相信,在不久的将来,正则化方法会在更多领域展现其价值,成为解决不适定问题的重要工具。
图像修复中基于TGV的去马赛克方法研究图像修复是计算机视觉领域中的一个重要研究方向,其目标是通过恢复受损图像的细节和结构,使其看起来更加自然和清晰。
在图像修复中,去除马赛克是一种常见的任务,旨在消除由于图像压缩、隐私保护或图像质量调整等原因引入的破坏性马赛克。
近年来,基于总变分(Total Variation,TV)的图像去马赛克方法已经得到了广泛研究和应用。
TV正则化是一种用于图像去噪和去马赛克的有效算法,其基本思想是通过最小化图像中相邻像素之间的差异来实现平滑效果。
然而,在一些复杂的图像修复场景中,传统的TV正则化方法表现出较差的性能,无法有效地去除马赛克。
为了克服传统TV正则化方法的局限性,研究人员提出了一种新的图像修复方法,即基于全变差(Total Generalized Variation,TGV)的去马赛克方法。
TGV正则化是对TV正则化的进一步扩展,能够更好地保留图像的纹理和细节。
基于TGV的去马赛克方法的关键思想是将图像修复问题建模为一个能量最小化的优化问题。
该方法通过最小化图像中马赛克区域与周围区域之间的差异来实现去马赛克。
具体而言,基于TGV的去马赛克方法通过引入一种额外的变量来建模图像中的马赛克区域,并使用TGV正则化来约束马赛克区域的光滑度。
这种方法能够更好地保持图像中的边缘和纹理,并在去马赛克过程中减少马赛克造成的伪影。
基于TGV的去马赛克方法的步骤包括以下几个关键阶段:首先,图像预处理。
在进行图像修复之前,需要对图像进行预处理,包括去除噪声、调整亮度和对比度等操作,以提高后续处理的准确性和稳定性。
然后,确定马赛克区域。
通过一些图像分割和特征提取算法,可以准确定位和标记图像中的马赛克区域。
这些方法可以基于图像的颜色、纹理、边缘等特征来进行判断。
接下来,使用TGV正则化进行图像修复。
基于TGV的去马赛克方法利用TGV正则化约束马赛克区域的光滑度,并通过最小化图像中马赛克区域和周围区域之间的差异来进行修复。
如何使用图像处理技术进行图像去模糊图像去模糊是一种常见的图像处理技术,它可以提高图像的清晰度和细节,使得模糊的图像变得更加清晰。
在本文中,我们将探讨如何使用图像处理技术进行图像去模糊。
图像去模糊的方法取决于模糊的原因。
图像模糊通常可以分为两种类型:运动模糊和晕影模糊。
运动模糊是由于相机或拍摄对象的运动造成的,而晕影模糊则是由于光线散射或透镜问题引起的。
不同类型的模糊需要不同的处理方法。
对于运动模糊的图像,一种常见的去模糊方法是逆滤波。
逆滤波使用图像的频谱信息来恢复原始图像。
逆滤波的基本原理是将图像的频谱与模糊函数的频谱相除来消除模糊效果。
然而,逆滤波容易受到噪声的干扰,因此在实际应用中需要进行一定的处理,例如添加正则化约束或使用滤波技术来减少噪声。
另一种常见的去模糊方法是盲去卷积。
盲去卷积是一种无需事先知道模糊函数的方法,它通过估计图像和模糊核之间的关系来恢复原始图像。
盲去卷积的主要思想是在模糊图像上进行反卷积操作,并通过迭代过程来优化结果。
与逆滤波相比,盲去卷积对于噪声的鲁棒性更好。
然而,盲去卷积的计算量较大,需要较长的处理时间。
对于晕影模糊的图像,一种常用的去模糊方法是维纳滤波。
维纳滤波是一种最小化均方误差的滤波技术,它可以通过对噪声和模糊函数进行估计来恢复原始图像。
维纳滤波的主要思想是在频域上对图像进行滤波,以减小噪声和模糊效果。
维纳滤波的优点是可以提供较好的去噪和去模糊效果,但它对于边缘和细节的保持效果可能不如其他方法。
除了以上方法,还有一些其他的图像去模糊技术,例如非负矩阵分解、稀疏编码和深度学习等。
这些方法可以根据具体的应用场景选择使用,以获得更好的图像去模糊效果。
无论使用哪种方法进行图像去模糊,都需要注意合理选择参数和处理策略。
参数的选择对于去模糊结果的质量有着重要的影响,因此需要根据具体情况进行调整。
图像去模糊也需要考虑算法的效率和处理时间,以便在实际应用中能够满足实时性的要求。
地球物理反演中的正则化技术及应用地球物理反演是研究地球内部结构和性质的重要手段。
正则化技术是地球物理反演过程中常用的数学方法,旨在解决反问题的不适定性和非唯一性,提高反演结果的稳定性和可靠性。
本文将介绍正则化技术的基本原理和常用方法,并探讨其在地球物理反演中的应用。
地球物理反演是根据观测数据推断地下地球结构和性质的过程。
然而,由于地球介质的复杂性以及观测数据的不完备性和噪声污染等因素的影响,地球物理反演问题往往是不适定的反问题。
也就是说,同一个目标模型可以对应多个不同的观测数据解释,使得反演结果存在非唯一性。
此外,反演过程中还可能存在数值不稳定性,即小的扰动可能导致大的误差放大。
为了克服不适定性和非唯一性问题,正则化技术在地球物理反演中得到广泛应用。
正则化通过向反演问题中引入附加信息,对反演结果进行约束,从而提高反演结果的稳定性和可靠性。
正则化的基本思想是在目标函数中同时考虑拟合数据的残差项和模型的先验信息项,通过调节两者之间的平衡,得到最优的反演结果。
在正则化技术中,最常用的方法是Tikhonov正则化。
Tikhonov正则化通过在目标函数中引入二阶范数(L2范数)惩罚项,对模型进行光滑约束,使得反演结果具有空间平滑性。
这种正则化方法在稳定性和保真性之间取得了良好的平衡,常用于地震波速度、重力场和磁场等反演问题。
除了Tikhonov正则化,还有一些其他常用的正则化技术,如L1范数正则化、TV正则化和脉冲响应正则化等。
L1范数正则化通过在目标函数中引入一阶范数惩罚项,将反演结果稀疏化,适用于具有稀疏结构的反演问题。
TV正则化是对图像进行处理的一种方法,通过将图像的梯度惩罚项添加到目标函数中,实现对反演结果的边缘保持和去噪。
脉冲响应正则化是将目标函数中的滤波器参数视作反演模型的参数,通过滤波器设计对反演结果进行约束。
这些正则化技术在地球物理反演中具有各自的优势和适用范围,根据具体的反演问题选择合适的正则化方法进行应用。
cost volume regularization的定义-概述说明以及解释1.引言1.1 概述Cost Volume Regularization是一种用于处理成本体积数据的正则化技术,它在计算机视觉、图像处理和深度学习等领域有着重要的应用。
通过在成本体积数据上引入正则化项,可以有效地改善模型的性能,提高模型的准确性和稳定性。
本文将详细介绍什么是cost volume regularization,探讨其在各个领域的应用以及优势所在。
通过分析和总结,旨在为读者提供关于cost volume regularization的全面理解,以帮助他们更好地应用这一技术解决实际问题。
1.2 文章结构:本文将分为三个部分来探讨cost volume regularization的定义及其应用。
首先在引言部分概述本文的主题,并介绍文章结构和目的。
接着在正文部分,将详细讨论什么是cost volume regularization,以及它在不同领域的应用。
最后在结论部分,对本文进行总结和展望未来研究方向,最终得出结论。
通过对文章结构的描述,读者可以清晰了解整篇文章的脉络和内容安排。
1.3 目的:本文的目的是介绍和解释cost volume regularization的定义,探讨其在计算机视觉和深度学习领域的应用,以及其优势和特点。
通过阐述cost volume regularization的概念和原理,帮助读者更好地理解这一技术在图像处理和计算机视觉任务中的重要性和作用。
同时,通过对该技术的分析和讨论,展示其在解决深度学习中的常见问题和挑战时的效果和优势。
通过本文的介绍,读者将对cost volume regularization的定义和应用有更深入的了解,为他们在相关领域的研究和实践提供指导和参考。
2.正文2.1 什么是cost volume regularizationCost volume regularization是一种用于图像处理和计算机视觉领域的技术,它主要用于解决视觉里程计、光流估计、深度估计等问题中的深度不连续性和误差积累问题。
格子玻尔兹曼正则化格子玻尔兹曼正则化是一种常用的机器学习算法,通过引入正则化项来优化模型的性能。
下面我将以人类的视角,以一种生动的方式来描述格子玻尔兹曼正则化的原理和应用。
让我们来想象一个场景。
假设你是一名厨师,每天都要根据客人的需求来烹饪各种不同的菜肴。
为了做出美味的菜肴,你需要掌握各种烹饪技巧和食材搭配的知识。
但是,你会发现每个人的口味都不一样,有些人喜欢辣的,有些人喜欢清淡的,有些人喜欢甜的。
所以,你需要根据每个人的口味来调整你的烹饪方法和食材选择。
机器学习中的格子玻尔兹曼正则化就像是这样一位厨师。
它通过学习大量的数据样本,来调整模型的参数,使得模型能够更好地适应不同的数据。
就像你根据每个人的口味来调整烹饪方法一样,格子玻尔兹曼正则化会根据不同的数据样本来调整模型的参数,以达到更好的预测效果。
为了实现这个目标,格子玻尔兹曼正则化引入了正则化项。
这个正则化项可以看作是一种惩罚机制,它限制了模型参数的大小,防止模型过拟合训练数据。
换句话说,正则化项使得模型更加平滑,避免了对训练数据的过度拟合。
在实际应用中,格子玻尔兹曼正则化被广泛用于图像处理、自然语言处理等领域。
例如,在图像处理中,我们可以使用格子玻尔兹曼正则化来去噪或者图像修复。
在自然语言处理中,格子玻尔兹曼正则化可以用于语言模型的训练,提高语言生成的准确性和流畅度。
格子玻尔兹曼正则化是一种重要的机器学习算法,通过引入正则化项来优化模型的性能。
它像一位厨师一样,根据不同的数据样本来调整模型的参数,以适应不同的数据。
通过合理使用格子玻尔兹曼正则化,我们可以提高模型的预测能力,实现更好的数据分析和处理效果。