5ANSYS 单元种类
- 格式:ppt
- 大小:16.94 MB
- 文档页数:31

ansys热分析常用单元
Ansys热分析包括:
稳态传热:系统温度场不随时间变化;
瞬态传热:系统温度场随时间明显变化。
热分析单元大概涉及到40种,其中纯粹用于热分析的有14种:线性:
LINK32:两维二节点热传导单元
LINK33:三维二节点热传导单元
LINK34:二节点热对流单元
LINK31:二节点热辐射单元
二维单元:
PLANE55:四节点四边形单元
PLANE77:八节点四边形单元
PLANE35:三节点三角形单元
PLANE75:四节点轴对称单元
PLANE75:八节点轴对称单元
三维实体:
SOLID87:六节点四面体单元
SOLID70:八节点六面体单元
SOLID90:二十节点六面体单元
壳:
SHELL57:四节点
点:
MASS71:质量点。

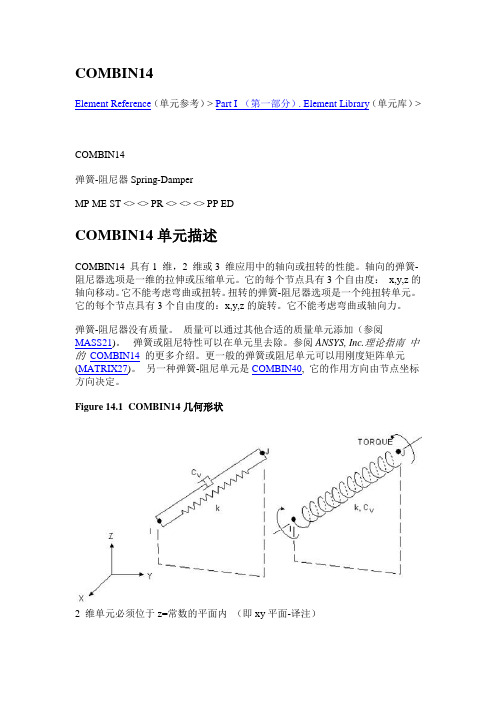
COMBIN14Element Reference(单元参考)> Part I (第一部分). Element Library(单元库)>COMBIN14弹簧-阻尼器Spring-DamperMP ME ST <> <> PR <> <> <> PP EDCOMBIN14单元描述COMBIN14 具有1 维,2 维或3 维应用中的轴向或扭转的性能。
轴向的弹簧-阻尼器选项是一维的拉伸或压缩单元。
它的每个节点具有3个自由度:x,y,z的轴向移动。
它不能考虑弯曲或扭转。
扭转的弹簧-阻尼器选项是一个纯扭转单元。
它的每个节点具有3个自由度的:x,y,z的旋转。
它不能考虑弯曲或轴向力。
弹簧-阻尼器没有质量。
质量可以通过其他合适的质量单元添加(参阅MASS21)。
弹簧或阻尼特性可以在单元里去除。
参阅ANSYS, Inc.理论指南中的COMBIN14的更多介绍。
更一般的弹簧或阻尼单元可以用刚度矩阵单元(MATRIX27)。
另一种弹簧-阻尼单元是COMBIN40, 它的作用方向由节点坐标方向决定。
Figure 14.1 COMBIN14几何形状2 维单元必须位于z=常数的平面内(即xy平面-译注)COMBIN14输入数据这个单元的几何形状,节点位置和坐标系统可以在“Figure 14.1 COMBIN14几何形状”中找到。
这个单元由两个节点,一个弹簧常数(k)和阻尼系数(c v)1 和(c v)2组成。
阻尼特性不能用于静力或无阻尼的模态分析。
轴向弹簧常数的单位是“力/长度”,阻尼系数的单位是“力*时间/长度”。
扭转弹簧常数和阻尼系数的单位是“力*长度/弧度”和“力*长度*时间/弧度”。
对于2维轴对称问题,这些值应该基于360°。
单元的阻尼部分只是把阻尼系数传到结构阻尼矩阵。
阻尼力(F) 或扭矩(T) 由下式计算:F x = - c v du x/dt or Tθ = - c v d θ/dt这里c v是阻尼系数,由c v = (c v)1 + (c v)2v式确定。

ANSYS各类型单元连接专题讲解(一)之连接总则一直以来,有不少同学咨询水哥关于ANSYS中杆单元、梁单元、壳单元、实体单元的连接问题。
之所以要用到各单元的连接,主要是由于我们在实际项目中,常常需要各种单元组合模拟,例如框架结构计算中的框架柱、框架梁采用梁单元模拟,楼板采用壳单元模拟,如此便会产生各类型单元之间的连接问题。
为解决部分朋友们的疑问,水哥依自己的理解将从以下几个方面系统讲解下ANSYS中杆单元、梁单元、壳单元、实体单元的连接,其中若有不合理之处,还望各位朋友批评指正。
本系列讲解目录如下:1、单元连接总原则。
2、杆与梁、壳、体单元的连接。
3、梁单元与实体单元铰接。
4、2D梁单元与2D实体单元刚接。
5、3D梁单元与3D实体单元刚接。
6、壳单元与实体单元连接。
7、单元连接综合实例。
本篇推文为该系列文章的首篇,主要说下ANSYS中单元连接总的原则以及简单介绍两个概念。
一般来说,按“杆梁壳体”单元顺序,只要后一种单元的自由度完全包含前一种单元的自由度,则只要有公共节点即可,不需要约束方程,否则需要耦合自由度与约束方程。
例如:(1)杆与梁、壳、体单元有公共节点即可,不需要约束方程。
(2)梁与壳有公共节点即可,也不需要约束写约束方程;壳梁自由度数目相同,自由度也相同,尽管壳的rotz是虚的自由度,也不妨碍二者之间的关系,这有点类同于梁与杆的关系。
(3)梁与体则要在相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
(4)壳与体则也要相同位置建立不同的节点,然后在节点处耦合自由度与施加约束方程。
从上述也可见,ANSYS无非是通过三种方法来实现单元之间的连接:共用节点、耦合、约束方程。
这里简单介绍下耦合与约束方程的基本概念。
一、耦合所谓耦合,其实是一种比较特殊的约束方程,只不过为了区别于普通一般的约束方程,方便用户操作,特定提出来的一个概念。
他具体指当我们需要迫使两个或多个自由度取得相同值(值未知)时,可以将这类自由耦合在一起。
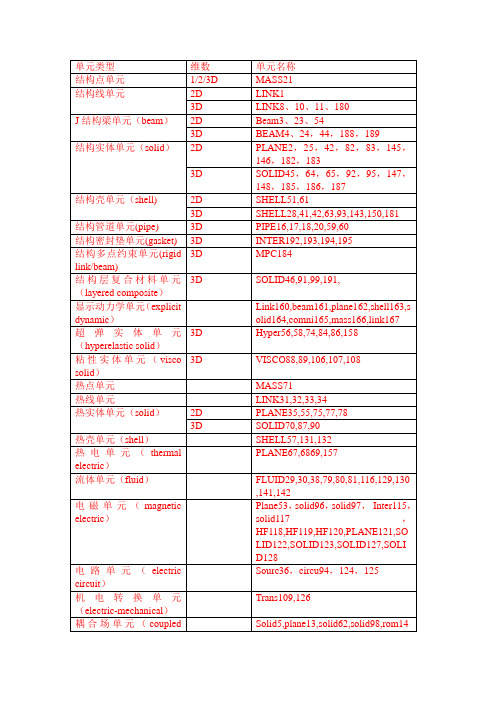
单元类型维数单元名称结构点单元1/2/3D MASS21结构线单元2D LINK13D LINK8、10、11、180J结构梁单元(beam)2D Beam3、23、543D BEAM4、24,44,188,189结构实体单元(solid)2D PLANE2,25,42,82,83,145,146,182,1833D SOLID45,64,65,92,95,147,148,185,186,187结构壳单元(shell) 2D SHELL51,613D SHELL28,41,42,63,93,143,150,181 结构管道单元(pipe) 3D PIPE16,17,18,20,59,60结构密封垫单元(gasket) 3D INTER192,193,194,195结构多点约束单元(rigidlink/beam)3D MPC184结构层复合材料单元(layered composite)3D SOLID46,91,99,191,显示动力学单元(explicit dynamic)Link160,beam161,plane162,shell163,s olid164,comni165,mass166,link167超弹实体单元(hyperelastic solid)3D Hyper56,58,74,84,86,158粘性实体单元(viscosolid)3D VISCO88,89,106,107,108热点单元MASS71热线单元LINK31,32,33,34热实体单元(solid)2D PLANE35,55,75,77,783D SOLID70,87,90热壳单元(shell)SHELL57,131,132热电单元(thermalelectric)PLANE67,6869,157流体单元(fluid)FLUID29,30,38,79,80,81,116,129,130,141,142电磁单元(magnetic electric)Plane53,solid96,solid97,Inter115,solid117,HF118,HF119,HF120,PLANE121,SO LID122,SOLID123,SOLID127,SOLI D128电路单元(electriccircuit)Sourc36,circu94,124,125机电转换单元(electric-mechanical)Trans109,126耦合场单元(coupled Solid5,plane13,solid62,solid98,rom14field) 4接触单元(contact)Contact12,26,48,49,52,TRAGE169,170CONTACT171,172,173,174,175,178矩阵单元(matrix)Matrix27,50无限边界单元(infinite)INFIN9,47,110,111表面效应单元(surface)SURF151,152,153,154Mesh200网格辅助单元(仅用于生成网格拓扑生成,不参与求解计算)初学ANSYS的人,通常会被ANSYS所提供的众多纷繁复杂的单元类型弄花了眼,如何选择正确的单元类型,也是新手学习时很头疼的问题。

参考ANSYS的中文帮助文件接触问题(参考ANSYS的中文帮助文件)当两个分离的表面互相碰触并共切时,就称它们牌接触状态。
在一般的物理意义中,牌接触状态的表面有下列特点:1、不互相渗透;2、能够互相传递法向压力和切向摩擦力;3、通常不传递法向拉力。
接触分类:刚性体-柔性体、柔性体-柔性体实际接触体相互不穿透,因此,程序必须在这两个面间建立一种关系,防止它们在有限元分析中相互穿过。
――罚函数法。
接触刚度――lagrange乘子法,增加一个附加自由度(接触压力),来满足不穿透条件――将罚函数法和lagrange乘子法结合起来,称之为增广lagrange法。
三种接触单元:节点对节点、节点对面、面对面.接触单元的实常数和单元选项设置:FKN:法向接触刚度。
这个值应该足够大,使接触穿透量小;同时也应该足够小,使问题没有病态矩阵。
FKN值通常在0。
1~10之间,对于体积变形问题,用值1。
0(默认),对弯曲问题,用值0。
1。
FTOLN:最大穿透容差。
穿透超过此值将尝试新的迭代。
这是一个与接触单元下面的实体单元深度(h)相乘的比例系数,缺省为0.1。
此值太小,会引起收敛困难。
ICONT:初始接触调整带。
它能用于围绕目标面给出一个“调整带”,调整带内任何接触点都被移到目标面上;如果不给出ICONT值,ANSYS根据模型的大小提供一个较小的默认值(<0.03=PINB:指定近区域接触范围(球形区).当目标单元进入pinball区时,认为它处于近区域接触,pinball区是围绕接触单元接触检测点的圆(二维)或球(三维)。
可以用实常数PINB调整球形区(此方法用于初始穿透大的问题是必要的)PMIN和PMAX:初始容许穿透容差。
这两个参数指定初始穿透范围,ANSYS把整个目标面(连同变形体)移到到由PMIN和PMAX指定的穿透范围内,而使其成为闭合接触的初始状态.初始调整是一个迭代过程,ANSYS最多使用20个迭代步把目标面调整到PMIN和PMAX范围内,如果无法完成,给出警告,可能需要修改几何模型.TAUMAX:接触面的最大等效剪应力.给出这个参数在于,不管接触压力值多大,只要等效剪应力达到最大值TAUMAX,就会发生滑动。
MATRIX27-刚度、阻尼和质量矩阵单元MATRIX27单元描述MATRIX27 代表一种任意的单元,单元的几何特性无定义,但其弹性运动学响应可用刚度、阻尼或者质量系数来指定。
本矩阵单元连接2 个节点,每个节点有6 个自由度:沿节点坐标系x、y、z 方向的平动和绕节点坐标系x、y、z 方向的转动。
单元的详细特性可以参考理论手册中的MATRIX27 单元。
其他类似的,但是通用性较差的单元有弹簧-阻尼器(COMBIN14)和质量单元(MASS21)。
MATRIX27单元的输入数据单元的节点位置和坐标系如图27-1(MATRIX27 单元示意图)所示。
该单元由2 个节点和系数矩阵定义。
刚度、阻尼和质量矩阵中的常数可以作为单元的实常数输入。
刚度常数的单位是(力/长度)或(力×长度/弧度);阻尼常数的单位是(力×时间/长度)或(力×长度×时间/弧度);质量常数的单位是(力×时间2/长度)或(力×长度×时间2/弧度)。
图27-1 MATRIX27 单元示意图此单元生成的所有矩阵皆是12×12 维的。
自由度排列的顺序为:I 节点的X 方向平动自由度(UX)、Y 方向平动自由度(UY)、Z 方向平动自由度(UZ)、绕X 轴转动的自由度(ROTX)、绕Y 轴转动的自由度(ROTY)、绕Z 轴转动的自由度(ROTZ),然后是J 节点的如上6 个自由度。
如果有一个节点没有使用,则它在矩阵中对应的全部行和列默认为0。
矩阵常数须按照在“MATRIX27 输出数据”中的矩阵元素表来输入。
举一个简单的例子,假如要定义一个仅在节点坐标系的X 方向有刚度K 的弹簧,则应定义关键字KEYOPT(2)= 0 和KEYOPT(3) = 4,同时输入实常数C1 = C58 = K 和C7 = -K。
“MATRIX27 单元输入一览”给出了此单元输入的总结。
ansys动力学与内聚力单元英文回答:ANSYS Dynamics and Cohesive Zone Elements.ANSYS Dynamics is a powerful finite element analysis (FEA) tool that can be used to simulate a wide range of dynamic events, such as impact, vibration, and shock. Cohesive zone elements (CZEs) are a type of finite element that can be used to model the behavior of materials that undergo fracture.CZEs are typically used to model the behavior of materials that are subjected to high levels of stress, such as those found in impact and crash simulations. CZEs can be used to model a variety of different material behaviors, including:Linear elastic.Elastic-plastic.Viscoelastic.Damage.CZEs can be used to model a variety of different fracture mechanisms, including:Mode I (opening)。
Mode II (sliding)。
Mode III (tearing)。
CZEs can be used to accurately predict the behavior of materials that undergo fracture, making them a valuable tool for engineers who are designing structures that are subjected to high levels of stress.中文回答:ANSYS 动力学与内聚力单元。
单元详解——Solid1853维8节点固体结构单元Solid185单元描述solid185单元用于构造三维固体结构.单元通过8个节点来定义,每个节点有3个沿着xyz方向平移的自由度.单元具有超弹性,应力钢化,蠕变,,大变形和大应变能力.还可采用混合模式模拟几乎不可压缩弹塑材料和完全不可压缩超弹性材料。
可以查看ANSYS, Inc. Theory Reference了解SOLID185的更多细节,Solid185单元的更高阶单元是186。
图 185.1 Solid185 单元SOLID185输入数据单元的几何和节点的位置见Figure 185.1: "SOLID185 Geometry". 单元由8个节点组成,定义为各向异性材料。
默认的单元坐标系为全局坐标系,可以通过ESYS定义单元坐标系,既而可定义各向异性材料的方向。
关于单元加载的描述见Node and Element Loads,压力可作为面力加载在如Figure 185.1: "SOLID185 Geometry"带圆圈的数字所指的单元面上,正的压力指向单元内部,温度可作为单元体力作用在节点上,节点I 的温度默认为TUNIF 指定的温度,如果其他节点的温度没有指定,默认和I 节点温度相同。
一般情况下,如果没有其他的温度被指定,都默认为TUNIF 指定的温度。
KEYOPT(6) = 1则单元采用混合模式,要了解关于混合模式使用的更多信息,可以访问ANSYS Elements Reference里面的Applications of Mixed u-P Formulations。
你可以通过ISTRESS或ISFILE命令给单元施加初始应力,可以通过ANSYS Basic Analysis Guide里的Initial Stress Loading访问更多的信息。
同样的,你可以设置KEYOPT(10) = 1通过子程序USTRESS来读入初始应力,可以通过ANSYS User Programmable Features了解子程序的更多信息。