农机辅助驾驶系统
- 格式:pptx
- 大小:7.52 MB
- 文档页数:11

农业工程信息化技术装备gricultural Engineering InformationA50农业信息化 2018.06<<随着我国城镇化和土地流转的深入,农村土地规模化、机械化、自动化作业成为可能,为农机自动驾驶推广提供了更大的市场空间。
自动驾驶系统总装机量在逐年增加,现主要分布在黑龙江和新疆地区,江苏以及内蒙等地区的农场和农机合作社已开始进行自动驾驶系统的安装,国家也已经将自动驾驶纳入到农机购置补贴中。
中国一拖是国内最早从事智能农机研发和技术推广的企业之一,早在2009年,中国一拖便向市场推出了基于卫星定位导航的自动驾驶系统。
2012年,中国一拖和徕卡公司合作,开始在LF2204、LZ2704动力换挡拖拉机及LX2004机械换挡拖拉机上配装液压控制转向的GPS导航系统。
2016年中国一拖选取国内具有自主开发能力的厂家进行合作,在东方红全系列拖拉机上进行自动驾驶系统的前装测试和验证。
1 前装部件农机自动驾驶导航系统根据重要程度区分,主要有五大部件:角度传感器、控制器、液压阀、卫星接收机、显示屏。
在农机自动驾驶导航系统前装关键技术及应用文/ 姜 斌 张明辉 孙鹏飞 (中国一拖集团有限公司)摘要:农机自动驾驶导航系统采用前装方式,可以在农机出厂时将自动驾驶导航设备安装调试到位,有效提高装配精度、降低故障率、降低成本,更有利于用户使用。
自动驾驶导航系统前装在国际上已得到普及应用,在国内各农机企业已开始进行推广。
关键词:自动驾驶;前装;布局;优势图1 自动驾驶导航系统组成图图2 角度传感器安装示意图前装时重点关注角度传感器、控制器、液压阀这些部件的安装合理性及可靠性。
角度传感器与农机匹配集成是国外各家先进企业的前装重点,比如角度传感器集成在拖拉机前桥、收获机后桥、折腰转向拖拉机折腰部位等,使得测量更精准,更能发挥自动驾驶的整体性能。
在国外先进农机制造中,ISOBUS系统是农机和先进农具在协同工作和实时控制过程中达到精细化和高效化的基础。

湖北省北斗农机信息化智能管理平台----系统介绍湖北省农业机械化技术推广总站2017年3月一项目背景二系统介绍三应用及扩展目录contents第一部分PART ONE项目背景传统农机管理方式存在问题调度不科学管理指挥者对农机的实际位置、状态等不清楚,调度不科学。
监管不实时农机作业质量无法实时控制,无法追溯,无法全局监管。
统计不准确作业统计滞后、不准确。
农机农业服务北斗解决方式引入北斗解决农业机械化目前存在的问题已成为首要选择我国自主研发目前23颗卫星在轨覆盖亚太2020覆盖全球支柱产业市场前景大信息化建设滞后国家大力倡导新的互联网创新思维互联网农业湖北省北斗导航应用示范项目背景湖北省北斗农机信息化智能管理平台将北斗信息终端装备于农用机械,通过系统平台为机械化播种、插秧、植保、收割、深松、秸秆还田等农机作业,提供作业数据采集、自动化处理、统计分析、精细化管理等服务,为农机作业管理工作了提供一套科学公正、行之有效的解决方案。
设备安装农机作业数据处理作业监控作业检查补贴兑付第二部分PART TWO系统介绍平台简介系统介绍湖北省北斗农机信息化智能管理平台,是一个以数字通信网络、北斗卫星导航系统和地理信息系统技术为依托,为农机管理者和生产管理者提供作业农机实时信息的综合性服务平台。
实时了解作业农机的位置、速度、农机状态等信息。
记录农机的行驶轨迹,并实现回放。
实时了解和统计单机或区域内的作业面积。
管理者可以综合考虑作业进度,农机投入情况,地理分布情况等因素,进行科学调度。
系统架构系统介绍[ 感知层]包括北斗农机终端和高清拍照设备,可实时自动获取农机作业数据。
[ 传输层] 融合现有的移动网络通信技术,将感知层获取的信息进行上报传输。
[ 服务层] 实现采集数据的接收和存储(通信服务器),建立基础信息数据库(数据库服务器),完成业务数据查询、计算和分析,并提供各种服务调用接口(应用服务器)。
[ 应用层] 为政府管理部门,农机合作组织,农机手、农机生产厂商等最终用户提供一系列人机交互界面,实现农机作业的实时监控和精细化管理。
北斗卫星导航技术在农用机械上的应用随着科学技术的不断进步,我国农业已经迈进了智慧管理、精准实施的发展轨道。
智能化农业机械装备的建设和应用是智慧精准农业的重要组成局部,也是保障粮食安全生产的最直接手段。
北斗卫星导航技术作为农业机械智能化技术中的一项关键技术,在近几年已应用于耕、种、管、收等农业生产各环节,并在生产实践中取得了非常好的应用效果。
01北斗卫星导航技术在农业机械中的应用现状所谓导航就是农业机械利用自身携带的传感器感知周围环境和车体的信息,通过对获得的信息进行处理并进行导航决策和操纵,从而完成相应的作业生产任务的过程。
中国北斗卫星导航系统是中国自行研制的全球卫星导航系统,是世界成熟的四大卫星导航系统之一。
由空间段、地面段、用户段三局部组成,可在全球范围内全天候、全天时为各类用户提供高精度、高可靠性的定位、导航、授时服务。
由于北斗卫星导航系统是我国自主研制的,在安全性和功能性方面更符合我国的国情需要。
近两年在国家和各省、市、区实施的农业机械购置补贴政策的推动下,一些科技型企业将北斗卫星系统与农业机械相结合,研发出了多款北斗农业自动导航产品,实现了多种农业机械的无人驾驶、精准作业功能。
02北斗农业自动导航驾驶系统北斗农业自动导航驾驶系统是由车载计算机、卫星接收机、转向操纵系统和基站等局部组成。
通过安装在相适应的农业机械上,利用北斗卫星的定位信号设计作业机械的行驶路线,在机械作业过程中综合其位置信息、姿态信息、航向角信息、传感器信息,通过操纵电动方向盘或液压系统,实现机械的转向,从而按照规划路径行驶,到达完成耕整地、播种、种植、田间管理和收获等各类作业目的。
一是北斗农业自动导航驾驶系统的优势。
1、节约劳动本钱。
北斗农业自动导航驾驶系统与农业机械相结合,可实现无人驾驶,有效替代人工操作,减少了劳动强度,节约用工本钱。
在我国城镇化进程加快,大批的农业生产人员脱离土地,农村牧区年轻劳动力明显缺乏,无人驾驶农业机械的应用可有效解决农业用工缺乏的难题;2、提高作业效率。
智能农机专题SPECIAL2019.10农 机 科 技 推 广AGRICULTURE MACHINERYTECHNOLOGY EXTENSION伴随着越来越多的新技术应用到农业领域,我国农机信息化、智能化水平越来越高,农机导航自动驾驶就是当前发展较快的一个典型案例。
通过在农机上安装导航自动驾驶系统,依靠高精度卫星定位装置获取农机位置、姿态和航向信息,对所获信息进行分析,驱动液压阀或电机来控制转向装置进行路线修正,就可以实现农机按照规划路线自动驾驶行驶作业。
这样不用驾驶员操作就可以完成耕作、播种、喷药等田间作业,不仅可以缓解驾驶员的疲劳,还可以降低作业成本和时间。
然而新产品新技术前期往往因为产品标准不完善、缺乏有效的产品评价手段等因素,难以快速推广应用。
经调查目前国内仅黑龙江省农垦鉴定站1家开展了农机导航自动驾驶系统的试验鉴定工作,以具有导航自动驾驶功能的农机产品为整体评价对象的检验、鉴定或认证尚属空白。
因此分析农机导航自动驾驶实际情况,对具备导航自动驾驶功能的农机产品开展产品认证评价有利于新技术应用推广,很有必要。
本文分析了我国农机导航自动驾驶系统分类、产品标准建设情况,介绍了产品认证相关知识,并从认证机构的角度对产品认证方案进行了策划。
一、农机导航自动驾驶产品现状1.农机导航自动驾驶系统现状 农机通过安装导航自动驾驶系统从而具有导航自动驾驶功能,行业内按照导航自动驾驶系统的安装时间节点不同分为前装和后装。
前装即在出厂前安装导航驾驶系统;后装是用户购买农机后自行加装导航自动驾驶系统,目前市场上后装产品居多。
后装是对农机的改装,包含供应商提供的产品和改装服务,因此后装质量受农机原本性能、导航自动驾驶系统质量、安装人员素质等诸多因素影响,加之改装是用户个人行为,所以对后装产品开展单纯的检验或认证评价意义不大。
前装由整机厂来完成导航自动驾驶系统的安装调试,产品标准化程度、质量可控性高,而且整机厂在产品设计初期就可以将导航功能作为整机的一部分来考虑,系统集成性好,也便于后续产品功能扩展、提升。
基于北斗导航的自动驾驶系统在轮式拖拉机上的应用摘要:目前农业机械以大型化、高效化、智能化、自动化、作业精细化、电液一体化为主流,基于北斗导航系统的农机自动驾驶控制技术是现代农业生产的一个重要组成部分,作为农业机械智能化装备的关键技术之一,同时农机自动导航技术是开展精准农业和智慧农业实践的前提与技术保障。
介绍了基于北斗导航的自动驾驶系统的组成及其工作原理,阐述了基于北斗导航自动驾驶系统在轮式拖拉机上的应用,分析了北斗农机自动驾驶系统相对于国外同等产品的优势。
关键词:北斗导航;自动驾驶系统;现代农业;精准农业;智慧农业;农业机器人;农业应用引言我国农业机械中使用的导航系统以 GPS 为主,系统稳定性和安全性方面存在着一定风险。
目前我国北斗导航系统已经开始投入使用,国家已经推出一系列基于北斗导航的补贴政策。
因此,基于北斗导航智能系统是开展精准农业和智慧农业实践的前提与技术保障。
卫星导航自动驾驶技术的推广应用将促进农业高新技术的推广应用与发展,提高作业精度,提高土地利用率,减轻机手劳动强度,延长作业时间,带来经济效益,促进现代农业发展。
农机自动导航控制技术应用研究与实践,是现代化农业生产的实际需求与迫切愿望。
我国自主研发的北斗卫星导航技术的高速发展,为北斗应用开发平台的建设提供了数据基础和北斗应用经验,也进一步加快了农机自动导航控制技术在耕作、播种、施肥等农业生产过程的应用。
1 北斗导航自动驾驶系统的组成结构及原理1.1 总体构架北斗农机导航自动控制系统主要由自动驾驶控制系统一般由触摸屏、控制器、电动方向盘、前轮转向传感器、GPS定位系统、网络基准站组成。
网络基准站接收机将接收到的空间卫星发射的实时卫星数据通过电台/4G传送至用户观测站,用户观测站的接受机接受并实时解算当前位置坐标,并将自位置坐标与基准站传来的位置数据比较,得出观测数据的可靠性及计算结果的收敛性,以此为依据对解算结果进行分析,减少冗余观测量,增加观测结果的可靠性。
农业无人驾驶技术的应用自动化农机操作农业无人驾驶技术的应用——自动化农机操作现代农业正逐渐向着自动化、智能化方向发展,其中农业无人驾驶技术的应用成为了农业生产领域的一大亮点。
自动化农机操作为农业生产带来了效率的提升、成本的降低以及农民劳动强度的减轻,具有广阔的应用前景。
一、农业无人驾驶技术的概述随着技术的不断发展,农业无人驾驶技术在农机操作上的应用逐渐增多。
它主要通过激光雷达、全球定位系统(GPS)、图像识别等高科技手段,实现对农机的自主导航、自动驾驶和自动作业。
相较于传统的农业生产方式,农业无人驾驶技术具有定位精度高、作业准确度高、效率高等优势。
二、农业无人驾驶技术在播种与施肥上的应用农业无人驾驶技术在播种与施肥方面的应用已经取得了一定的突破。
通过激光雷达和图像识别技术,无人驾驶农机能够精确测量土地表面的高度、肥沃度以及水分含量,从而实现精准播种和施肥。
这不仅可以提高作物的种植质量,还能节约农业资源的利用。
三、农业无人驾驶技术在喷洒与除草上的应用农业无人驾驶技术在化学品喷洒与除草方面的应用也颇具潜力。
通过图像识别技术,无人驾驶农机可以自动识别出田间作物与杂草的差异,并根据需要进行精确的化学品喷洒与除草。
这样既可以保证农作物的健康生长,又可以避免化学药剂对环境的不良影响。
四、农业无人驾驶技术在收割与整理上的应用农业无人驾驶技术在农作物收割与整理方面的应用也有着广泛的前景。
通过激光雷达和图像识别技术,无人驾驶农机能够准确判断农作物的生长情况和成熟度,并自动进行收割和整理。
这样不仅提高了农作物的收割效率,还确保了作物的质量。
五、农业无人驾驶技术的优势和挑战农业无人驾驶技术的应用给农业生产带来了诸多优势,如提高了农业生产的效率、降低了农业生产的成本、减轻了农民的劳动强度等。
然而,与此同时,农业无人驾驶技术的应用还面临一些挑战,如技术的安全性、设备的稳定性、成本的高昂等问题。
因此,未来的研究与发展还需要加大力度,以克服这些挑战,推动农业无人驾驶技术的进一步应用和发展。
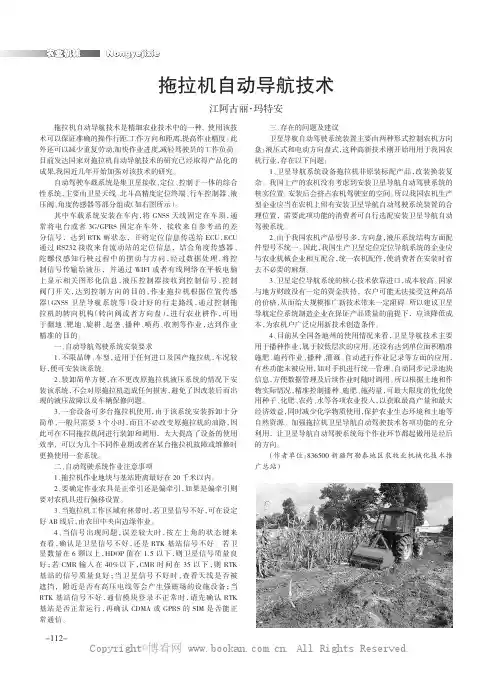
拖拉机自动导航技术江阿古丽·玛特安N o n g y e j i x i e拖拉机自动导航技术是精细农业技术中的一种,使用该技术可以保证准确的操作行距,工作方向和距离,提高作业精度。
此外还可以减少重复劳动,加快作业进度,减轻驾驶员的工作负荷。
目前发达国家对拖拉机自动导航技术的研究已经取得产品化的成果,我国近几年开始加强对该技术的研究。
自动驾驶车载系统是集卫星接收、定位、控制于一体的综合性系统,主要由卫星天线、北斗高精度定位终端、行车控制器、液压阀、角度传感器等部分组成(如右图所示)。
其中车载系统安装在车内,将GNSS 天线固定在车顶,通常将电台或者3G/GPRS 固定在车外,接收来自参考站的差分信号,达到RTK 解状态,并将定位信息传送给ECU ,ECU 通过RS232接收来自流动站的定位信息,结合角度传感器、陀螺仪感知行驶过程中的摆动与方向,经过数据处理,将控制信号传输给液压,并通过WIFI 或者有线网络在平板电脑上显示相关图形化信息,液压控制器接收到控制信号,控制阀门开关,达到控制方向的目的,作业拖拉机根据位置传感器(GNSS 卫星导航系统等)设计好的行走路线,通过控制拖拉机的转向机构(转向阀或者方向盘),进行农业耕作,可用于翻地、靶地、旋耕、起垄、播种、喷药、收割等作业,达到作业精准的目的。
一、自动导航驾驶系统安装要求1、不限品牌、车型,适用于任何进口及国产拖拉机,车况较好,便可安装该系统。
2、装卸简单方便,在不更改原拖拉机液压系统的情况下安装该系统,不会对原拖拉机造成任何损害,避免了因改装后而出现的液压故障以及车辆保修问题。
3、一套设备可多台拖拉机使用,由于该系统安装拆卸十分简单,一般只需要3个小时,而且不必改变原拖拉机的油路,因此可在不同拖拉机间进行装卸和调用,大大提高了设备的使用效率,可以为几个不同作业期或者在某台拖拉机故障或维修时更换使用一套系统。
二、自动驾驶系统作业注意事项1、拖拉机作业地块与基站距离最好在20千米以内。
农业机械行业无人驾驶农机具研发方案第1章研发背景与意义 (3)1.1 农业机械行业发展现状 (3)1.2 无人驾驶农机具的市场需求 (3)第2章技术路线与研发目标 (4)2.1 技术路线概述 (4)2.2 研发目标 (4)2.3 技术难点与解决方案 (5)第3章无人驾驶农机具系统设计 (5)3.1 系统架构设计 (5)3.1.1 感知层 (5)3.1.2 控制层 (5)3.1.3 应用层 (6)3.2 关键模块功能设计 (6)3.2.1 环境感知模块 (6)3.2.2 驱动控制模块 (6)3.2.3 导航控制模块 (6)3.2.4 任务调度模块 (7)3.2.5 监控模块 (7)第四章感知与避障技术 (7)4.1 感知系统设计 (7)4.1.1 概述 (7)4.1.2 感知设备选型 (7)4.1.3 感知数据处理 (7)4.2 避障算法研究 (8)4.2.1 避障算法概述 (8)4.2.2 算法框架 (8)4.2.3 算法优化 (8)4.3 感知与避障系统集成 (8)4.3.1 系统架构 (8)4.3.2 系统集成与调试 (8)4.3.3 系统功能评估 (8)第5章导航与定位技术 (9)5.1 导航系统设计 (9)5.1.1 系统概述 (9)5.1.2 系统组成 (9)5.1.3 系统功能 (9)5.2 定位算法研究 (9)5.2.1 卡尔曼滤波算法 (9)5.2.2 滑模控制算法 (9)5.2.3 神经网络算法 (10)5.3 导航与定位系统优化 (10)5.3.2 软件优化 (10)5.3.3 系统抗干扰能力提升 (10)第6章控制系统研发 (10)6.1 控制策略设计 (10)6.1.1 控制目标 (10)6.1.2 控制策略 (10)6.2 控制算法研究 (11)6.2.1 导航算法 (11)6.2.2 速度控制算法 (11)6.2.3 转向控制算法 (11)6.3 控制系统实现与调试 (11)6.3.1 硬件系统实现 (11)6.3.2 软件系统实现 (11)6.3.3 系统调试 (11)6.3.4 实地试验 (11)第7章通信系统设计 (11)7.1 通信协议研究 (12)7.1.1 通信协议概述 (12)7.1.2 通信协议选择 (12)7.2 通信模块选型与设计 (12)7.2.1 通信模块选型 (12)7.2.2 通信模块设计 (12)7.3 通信系统功能优化 (12)7.3.1 信号增强技术 (12)7.3.2 网络优化技术 (13)7.3.3 安全功能提升 (13)第8章农机具适配与集成 (13)8.1 农机具选型与适配 (13)8.1.1 农机具类型分析 (13)8.1.2 农机具功能要求 (13)8.1.3 农机具选型原则 (13)8.1.4 农机具适配方案 (13)8.2 无人驾驶农机具集成 (14)8.2.1 集成方案设计 (14)8.2.2 集成关键技术 (14)8.2.3 集成实施方案 (14)8.3 适配与集成测试 (14)8.3.1 测试目标 (15)8.3.2 测试内容 (15)8.3.3 测试方法与步骤 (15)第9章系统功能评估与优化 (15)9.1 功能指标体系构建 (15)9.1.1 作业精度 (15)9.1.3 系统稳定性 (15)9.1.4 安全性 (15)9.1.5 用户满意度 (16)9.2 功能评估方法研究 (16)9.2.1 实验法 (16)9.2.2 模拟法 (16)9.2.3 用户调查法 (16)9.2.4 综合评价法 (16)9.3 系统优化策略 (16)9.3.1 提高作业精度 (16)9.3.2 提高作业效率 (16)9.3.3 增强系统稳定性 (16)9.3.4 提高安全性 (17)9.3.5 提升用户满意度 (17)第10章应用示范与推广 (17)10.1 应用场景选择与示范 (17)10.1.1 选择原则 (17)10.1.2 示范区域 (17)10.1.3 示范效果评价 (17)10.2 推广策略研究 (17)10.2.1 政策支持 (17)10.2.2 技术培训与宣传 (18)10.2.3 产业链协同发展 (18)10.3 市场前景分析展望 (18)10.3.1 市场需求 (18)10.3.2 市场竞争 (18)10.3.3 发展趋势 (18)第1章研发背景与意义1.1 农业机械行业发展现状我国农业现代化的推进,农业机械行业得到了快速发展。
基于C#的嵌入式农机GPS辅助导航串口通信程序的设计王鹏;王熙【摘要】针对黑龙江省农垦地区自动化驾驶技术的发展,在Microsoft Visual Studio 2008开发环境下使用C#设计开发了嵌入式农机GPS辅助导航系统.该系统主要由GPS信息、GPS导航、光靶控制、参数设置和作业记录组成.试验结果表明:该软件在LJD-eWin7000触控一体机下运行,通过串口读取AG332型GPS接收机的数据并进行相应的解析,获得当前位置的基本信息,从而达到定位和导航的功能.该软件在LJD-eWin7000触控一体机下运行稳定,效果良好.【期刊名称】《农机化研究》【年(卷),期】2013(035)009【总页数】4页(P78-81)【关键词】辅助导航;串口通信;自动驾驶;农机【作者】王鹏;王熙【作者单位】黑龙江八一农垦大学工程学院,黑龙江大庆163319;黑龙江八一农垦大学工程学院,黑龙江大庆163319【正文语种】中文【中图分类】TP273+.50 引言随着科学技术的发展,越来越多的科技手段应用在各个行业中来提高生产效率。
在农业生产方面,从过去的手工劳动到现在开始趋向的农业机械化和农业数字化,很多的高科技产品已经在农业生产劳动中开始应用,不仅节省了人力资源,还在很大程度上解决了劳动生产效率低的问题。
在北美和西欧地区这种趋势表现的非常明显。
在我国的新疆和东北地区,人们将带有数字化设备的大型农业机械应用在农业生产中的发展势头日益迅猛,极大地提高了农业生产的效率。
而农机辅助导航系统可以提高作业的行距和作业方向的精确度,解决了作业精度以及工作效率低的问题[1],同时将人工作业技术的难度降低。
所以,推广农机辅助导航系统对于我国发展现代化农业具有十分重要的意义[2]。
在此,就如何在实现串口通信和GPS数据解析问题进行了探讨。
1 嵌入式系统嵌入式系统是“用来控制、监视或者辅助操作机器和设备的装置”。
它是以计算机技术为基础,以应用为中心,并且软硬件是可裁减的,能满足应用系统对功能、可靠性、成本、体积、功耗等指标的严格要求的专用计算机系统,这是国际电气和电子工程师协会的定义。