挖掘机工作装置的虚拟样机建立及运动学仿真——以农用液压挖掘机为例
- 格式:pdf
- 大小:186.65 KB
- 文档页数:3

万方数据万方数据设备设计/诊断维缈再制造现代制造工程2009年第11期tional displacement,测量分量分别为x,y。
仿真结果曲线如图4、图5所示。
20譬15墨10越羹5O一一铲斗质心加速厦曲线…斗杆质心加速度曲线一动臂质心加速度曲线_氇%。
■k{电蟛O.01.02.03.04.05.06.07.08.09.010.0时间/s图2铲斗、斗杆、动臂质心加速度曲线蓁蒌◆g\稔翅图3铲斗、斗杆、动臂质心速度曲线i;羲耋图4斗齿标记点X方向位移曲线由仿真结果可知挖掘机的最大工作尺寸:最大挖掘半径为8.95m、最大挖掘深度为5.26m、最大挖掘高度为2.45m。
2.3挖掘过程中力图6斗齿尖处标记点运动轨迹的分析研究挖掘阻力【l训的目的是要确定需要的斗齿挖掘力及其变化规律,以便在工作装置设计中给予保证。
工作装置由铲斗、斗杆、动臂以及连杆机构和各种T作液压缸组成。
对这些结构件的分析计算,首先应该确定各结构件的最不利工况,即在这一工况下对某一结构件可能出现最大应力,以这一工况作为设计该结构件的依据,也就是强度设计中计算位置的选择。
在确定挖掘阻力后进行仿真,分析铰接点处的受力情况,为零件的强度分析做准备。
在挖掘机铲斗处施加单作用力,力的方向为铲斗挖掘的切线方向。
力的作用方式为Body fixed。
选择采用方向矢量定义力的方向,做出标记点,使之与力的作用点的连线为铲斗的切线方向。
使用函数定义力的大小,输入函数STEP(time,6,0,6.1,250。
根据仿真需要编写ADAMS/solver类型的仿真脚本(Simu-lation Script:Simulate/Kinematic。
end=8。
step=180Deacfivale/Sforce,id=1Simulate/Kinematic,end=10,step=20采用编写的仿真脚本进行仿真,得到各铰点力的变化曲线。
如图7、图8、图9所示。
o星较图5斗齿标记点Y方向位移曲线单击主工具条中的“书”按钮显示曲线的统计结果,包括:曲线数据点的最大值、最小值和平均值等。
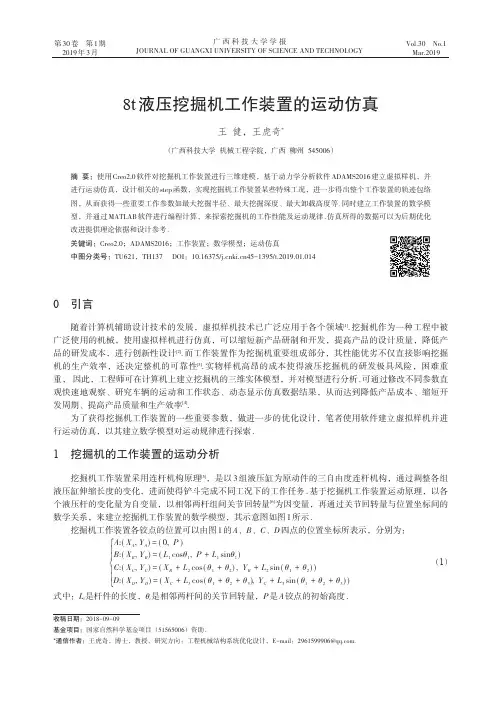
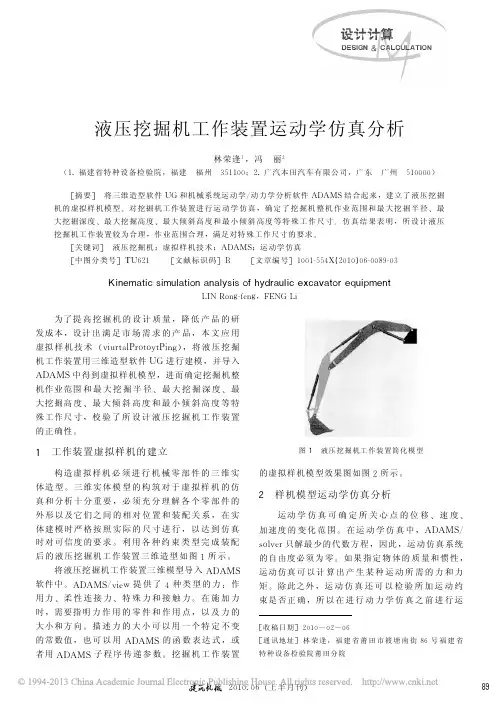
8t 液压挖掘机工作装置的运动仿真王健,王虎奇*(广西科技大学机械工程学院,广西柳州545006)摘要:使用Creo2.0软件对挖掘机工作装置进行三维建模,基于动力学分析软件ADAMS2016建立虚拟样机,并进行运动仿真,设计相关的step 函数,实现挖掘机工作装置某些特殊工况,进一步得出整个工作装置的轨迹包络图,从而获得一些重要工作参数如最大挖掘半径、最大挖掘深度、最大卸载高度等.同时建立工作装置的数学模型,并通过MATLAB 软件进行编程计算,来探索挖掘机的工作性能及运动规律.仿真所得的数据可以为后期优化改进提供理论依据和设计参考.关键词:Creo2.0;ADAMS2016;工作装置;数学模型;运动仿真中图分类号:TU621,TH137DOI :10.16375/45-1395/t.2019.01.0140引言随着计算机辅助设计技术的发展,虚拟样机技术已广泛应用于各个领域[1].挖掘机作为一种工程中被广泛使用的机械,使用虚拟样机进行仿真,可以缩短新产品研制和开发,提高产品的设计质量,降低产品的研发成本,进行创新性设计[2].而工作装置作为挖掘机重要组成部分,其性能优劣不仅直接影响挖掘机的生产效率,还决定整机的可靠性[3].实物样机高昂的成本使得液压挖掘机的研发极具风险,困难重重,因此,工程师可在计算机上建立挖掘机的三维实体模型,并对模型进行分析.可通过修改不同参数直观快速地观察、研究车辆的运动和工作状态、动态显示仿真数据结果,从而达到降低产品成本、缩短开发周期、提高产品质量和生产效率[4].为了获得挖掘机工作装置的一些重要参数,做进一步的优化设计,笔者使用软件建立虚拟样机并进行运动仿真,以其建立数学模型对运动规律进行探索.1挖掘机的工作装置的运动分析挖掘机工作装置采用连杆机构原理[5],是以3组液压缸为原动件的三自由度连杆机构,通过调整各组液压缸伸缩长度的变化,进而使得铲斗完成不同工况下的工作任务.基于挖掘机工作装置运动原理,以各个液压杆的变化量为自变量,以相邻两杆组间关节回转量[6]为因变量,再通过关节回转量与位置坐标间的数学关系,来建立挖掘机工作装置的数学模型,其示意图如图1所示.挖掘机工作装置各铰点的位置可以由图1的A 、B 、C 、D 四点的位置坐标所表示,分别为:ìíîïïïïA :(X A ,Y A )=(0,P )B :(X B ,Y B )=(L 1cos θ1,P +L 1sin θ1)C :(X C ,Y C )=(X B +L 2cos(θ1+θ2),Y B +L 2sin(θ1+θ2))D :(X D ,Y D )=(X C +L 3cos(θ1+θ2+θ3),Y C +L 3sin(θ1+θ2+θ3))(1)式中:L i 是杆件的长度,θi 是相邻两杆间的关节回转量,P 是A 铰点的初始高度.收稿日期:2018-09-09基金项目:国家自然科学基金项目(51565006)资助.*通信作者:王虎奇,博士,教授,研究方向:工程机械结构系统优化设计,E-mail :2961599906@.第30卷第1期2019年3月广西科技大学学报JOURNAL OF GUANGXI UNIVERSITY OF SCIENCE AND TECHNOLOGYVol.30No.1Mar.2019第1期式(1)中4点的坐标位置由关节回转量θ1、θ2、θ3的值所决定,而这3个角度变化值取决于液压杆伸缩长度L 7、L 4、L 15的变化,其中的关系可由式(2)表示:ìíîïïïïïïïïθ1=arccosL 28+L 29-L 272L 8L 9+β6-π2-β5θ2=arccos L 26+L 25-L 242L 6L5+β1+β3-πθ3=β7-(π-β8-β10-β11) (2)式中:βi 表示杆件间的夹角.铲斗、斗杆液压杆与斗杆之间是由一个四杆机构相连接的,其连接部分示意图如图2所示.通过液压杆L 15的伸缩变化,在连杆与摇杆销接的铰点施加力矩,引发四杆机构的变形,从而使得铲斗产生绕铰点C 旋转运动.由于四杆机构的位置变化复杂,需要更为复杂的函数关系,则式(2)中θ3与L 15[7]的关系可以由式(3)表示:ìíîïïïïïïïïïïβ12=arccos(L 212+L 216-L 2152L 12L 16)β9=2π-β12-β13L 10=L 212+L 213-2L 12L 13cos β9β10=arccos(L 213+L 210-L 2122L 13L 10)β11=arccos(L 214+L 210-L 2112L 14L 10)(3)使用MATLAB 软件进行编程以及数学模型的数据计算,通过改变液压杆的伸缩量,可以得出关键点的位置坐标,以此来检验数学模型的正确性.2工作装置动力学模型的建立及其仿真2.1工作装置的简化约束模型导入到ADAMS 中的模型很好地保留了原来所建模型的各种属性,但是原有模型各个部件间的装配关系已不复存在,各零件只是按原来的位置关系独立地存在于ADAMS 环境中[8].为了实现进一步的操作,必须将各个部件通过约束副重新组装起来.挖掘机工作装置的重要组成部分如图3所示,其运动方式主要由液压缸与液压杆的平移运动以及各个图1工作装置的几何关系示意图Fig.1Schematic diagram of working device geometry图2斗杆与铲斗连接部位的几何关系示意图Fig.2Schematic diagram of geometric relation be-tween bucket bar and bucket王健等:8t 液压挖掘机工作装置的运动仿真91第30卷广西科技大学学报杆件间的旋转运动组成,为了模拟挖掘机的工作方式,需要在各个部件间设置相对应的约束副,所定义的约束副如表1所示.2.2模型的仿真为了让模型完成既定的动作,需要在定义的运动中输入对应的函数.ADAMDS 软件通常采用的函数是step 函数,它的表述形式是:step (t ,t 0,x (t 0),t 1,x (t 1)),其中t 表示函数自变量,t 0表示自变量的初始值,x (t 0)表示自变量函数的初始值,t 1表示自变量的结束值,x (t 1)表示自变量函数的结束值[9].此次仿真选取自变量为时间,自变量函数为液压杆的伸缩长度.2.2.1各运动的step 函数此仿真过程模拟了挖掘机由挖掘到提臂回转到卸料再到空斗返回的全过程,所定义的具体工况与step 函数如下所示:1)预调整:斗杆与铲斗液压缸处于全缩状态,动臂液压缸处于全伸状态.2)挖掘工况此工况:①动臂挖掘工况:动臂开始收缩至最大行程,可以得到最大挖掘半径.②斗杆挖掘工况:收缩部分铲斗液压杆,使其铲齿与斗杆共面,从而可以得到最大挖掘深度[10].3)提臂回转工况:全缩铲斗液压杆进行装载,然后全缩斗杆以及动臂液压杆.4)卸料工况:铲斗达到最大卸料高度时,全缩铲斗液压杆,完成卸料.5)空斗返回工况:收缩各液压缸,使工作装置到达初始位置.模型仿真过程中所定义的具体step 函数及齿尖在仿真过程中所作的x 与z 方向的位移如表2、图4所示.注:1-行走装置;2-旋转平台;3-动臂斗杆;4-动臂液压缸;5-动臂液压杆;6-斗杆液压缸;7-斗杆液压杆;8-斗杆;9-铲斗液压缸;10-铲斗液压杆;11-摇杆;12-连杆;13-铲斗图3工作装置的简化模型图Fig.3Simplified model diagram of workingdevice运动副圆柱副球副旋转副移动副固定副部件1斗杆液压缸铲斗液压缸摇杆动臂液压缸动臂液压杆斗杆液压杆铲斗液压杆连杆旋转平台动臂斗杆铲斗动臂液压缸斗杆液压缸铲斗液压缸行走装置行走装置部件2动臂斗杆斗杆旋转平台动臂斗杆连杆摇杆动臂斗杆铲斗连杆动臂液压杆斗杆液压杆铲斗液压杆地面旋转平台表1各部件所定义的约束副Tab.1Constraint pairs defined by each component仿真过程预调整挖掘提臂回转卸料空斗返回动臂step (t ,0,0,5,-179)step (t ,15,0,20,891)step (t ,30,0,35,-891)step (t ,45,0,50,179)斗杆step (t ,5,0,10,357)step (t ,21.5,0,26.5,-791)step (t ,35,0,40,791)step (t ,50,0,55,-357)铲斗step (t ,10,0,15,348)step (t ,20,0,21.5,-174)+step (t ,26.5,0,30,-460)step (t ,40,0,45,634)step (t ,55,0,60,-348)表2各个过程的step 函数Tab.2Step function for each procedure92第1期2.2.2工作装置的仿真运动轨迹及后处理结果1)工作装置斗杆挖掘过程的运动仿真在此仿真过程中,不仅可以模拟出挖掘机的一些重要性能参数,更重要的是能找出铲尖仿真至任意位置时液压杆对应的伸缩量.通过调整上面step 函数,使铲尖到达斗杆全缩,铰点B 、C 、D 位于同一直线的位置,之后再改变动臂液压杆伸缩量,使其到达z 方向位移为0的位置.最后调整斗杆的step 函数来模拟斗杆挖掘工况,通过在铲尖设计方向与大小随着铲斗位置变化的切向力与法向力的step 函数,来模拟挖掘机斗杆挖掘的挖掘阻力,同时在铲斗重心处设计一个始终竖直向下的力的step 函数,来模拟物料的重力变化.其中所设计的斗杆挖掘step 函数及关键铰点的外载荷变化如图5所示.如图5所示,在19.5~22.0s 内,斗杆挖掘的挖掘阻力和物料重力随着铲斗关节回转角度的增加而逐渐增加,此时各个关键铰点所受到的外力载荷也在不断增加,其中动臂平台铰接点的受力变化最为显著;在22.0~25.0s 内,铲斗挖掘物料结束开始提臂,挖掘阻力开始不断减小,物料重力保持不变,各个关键铰点的外力载荷开始不断减小.2)工作装置运动全过程运动仿真通过软件的后处理模块所得到的x、z 方向的位移图,可得到的如图6所示的一些常用数据,其具体数据如表5所示.3)仿真结果、模型计算结果与实际设计值的数据对比数据对比如表6所示,由表6可以统计出:实际设计值、数学模型计算值与仿真值对比所产生误差在0.91%之内,符合重型机械设计标准,因此仿真所得的数据可以作为设计的参考.表3斗杆挖掘过程中位置调整的step 函数Tab.3Step function of position adjustment duringbucket bar mining process部件动臂斗杆铲斗Step 函数step (t ,0,0,5,-179)+step (t ,15,0,19.5,500)step (t ,5,0,10,357)+step (t ,19.5,0,25,-791)step (t ,0,0,5,348)+step (t ,5,0,10,-174)外载荷切向力法向力重力Step 函数step (t ,19.5,0,22,17036.8)-step (t ,22,0,24.5,17036.8)step (t ,19.5,0,22,-7155.5)-step (t ,22,0,25,-7155.5)step (t ,19.5,0,22,5400)表4斗杆挖掘过程中外力变化调整的step 函数Tab.4Step function of external force change adjustmentduring bucket bar mining process图4铲齿仿真过程的x-z 方向位移Fig.4X-z direction displacement in the process of shoveltooth simulation 图5斗杆挖掘工况下关键铰点受外力载荷图Fig.5Loading diagram of the key hinge points of the bucket barexcavation王健等:8t 液压挖掘机工作装置的运动仿真93第30卷广西科技大学学报3结论基于D-H 矩阵原理构建工作装置数学模型,利用MATLAB 软件编程计算,再使用ADAMS 软件进行仿真,最后所得的结果与实际设计值相比较.结果表明:ADAMS 运动仿真与实际设计的参数间没有太大误差,与数学模型计算值间的对比也检验了所建立数学模型的正确性.同时还仿真了斗杆挖掘工况,得出了斗杆挖掘每个瞬时各个关键铰点外载荷以及作用力最为明显的位置.上述的过程不仅可以检验仿真结果的准确性,而且可以深化对工作装置运动学原理的理解,所建立的正确数学模型还可以为挖掘机的改良开发提供了研究依据,为进一步的优化改进提供了理论基础.参考文献[1]石明全,薛运锋,陈维义,等.某发动机的参数化动态仿真分析[J].郑州大学学报(工学版),2005,26(3):79-82.[2]魏海燕.虚拟制造技术的相关概念及其应用[J].机械工程师,1999(9):1-2.[3]谢贤彬.挖掘机工作装置CAD 系统的研究与开发[D].沈阳:东北大学,2007.[4]廖抒华,杨帆,唐兴,等.基于ADAMS 的微车万向传动装置的振动优化[J].广西科技大学学报,2014,25(2):50-53.[5]张芒国.机液一体化虚拟样机技术研究[D].济南:山东大学,2005.[6]臧庆凯.六自由度机械手运动学与运动规划研究[D].柳州:广西工学院,2012.[7]陈钰尘.小型液压挖掘机工作装置的参数化设计及仿真分析[D].成都:西南交通大学,2010.[8]秦成,史淑玲.挖掘机摇臂机构的虚拟样机研究[J].机械工程师,2008(3):133-134.[9]李光,仝雷强,张永明,等.基于Pro/E 及ADAMS 的液压挖掘机整机机构的建模与运动仿真[J].机械管理开发,2010,25(6):46-47.[10]孙克义.液压挖掘机工作装置的动力学分析与仿真[D].兰州:兰州理工大学,2014.Motion simulation of 8t hydraulic excavator working deviceWANG Jian ,WANG Huqi *(School of Mechanical Engineering ,Guangxi University of Science and Technology ,Liuzhou 545006,China )Abstract :Creo2.0software is used to build the three-dimensional model of excavator working device.Based on ADAMS2016software ,the virtual prototype is built ,and the motion simulation is carried out.The step function is designed to realize some special working conditions and obtain the trajectory注:a -最大挖掘高度;b -最大挖掘深度;c -停机面最小挖掘半径;d -最大挖掘半径;e -最大卸载高度图6工作装置轨迹包络图Fig.6Envelope diagram of working devicetrack表5工作装置仿真数据表Tab.5Working device simulation data tablemm工作参数仿真值最大挖掘高度6738.3最大挖掘深度4036.4停机面最小挖掘半径6194.9最大挖掘半径6417.4最大卸载高度4716.6表6实际数据与仿真结果的对比Tab.6Comparison of actual data and simulation results mm工作参数最大挖掘半径最大挖掘深度最大卸料高度实际设计值640040554760仿真值6417.44036.44716.6数学模型计算6392.64026.24740.594第1期envelope diagram of the whole working device.Some working parameters are obtained ,such as maxi-mum excavation radius ,maximum excavation depth ,maximum unloading height and so on.At the same time ,the mathematical model of the working device is established ,and the program calculation is carried out by MATLAB software to explore the working performance and movement rules of exca-vator.The simulation data can provide theoretical basis and design reference for later optimization and improvement.Key words :Creo2.0;ADAMS2016;working device;mathematical model;simulation(责任编辑:黎娅)王健等:8t 液压挖掘机工作装置的运动仿真ing system for mobile navigation devices[C]//International Conference on Consumer Electronics ,IEEE ,2013:655-656.[8]ZHANG D ,FANG B ,YANG W ,et al.Robust inverse perspective mapping based on vanishing point[C]//International Confer⁃ence on Security ,Pattern Analysis ,and Cybernetics.IEEE ,2014:458-463.[9]王鹏霏,罗文广,曹月花,等.基于DM6437的视频采集硬件系统研发[J].广西科技大学学报,2016,27(1):19-25.[10]赵英汉,方华.基于TMS320DM642的视频处理系统的设计[J].广西工学院学报,2010,21(4):34-37.[11]徐芳,刘金红,王宣.基于标定的CCD 图像畸变校正方法研究[J].液晶与显示,2013,28(4):633-640.[12]刘祥峰.基于鱼眼相机的全景环视系统关键技术研究[D].成都:电子科技大学,2016.[13]曹毓,冯莹,雷兵,等.逆透视映射公式的误差分析及准确度验证[J].光子学报,2011,40(12):1833-1838.[14]胡坤福,高虹,范晓娟,等.基于DM6437的逆投影变换技术[J].物联网技术,2017(7):65-67,70.Study on on-board panoramic vision systemGAO Hong 1,LUO Wenguang 1,WANG Zhaojie 1,LIU Decheng 1,BIN Yang *2(1.School of Electrical and Information Engineering ,Guangxi University of Science and Technology ,Liuzhou 545006,China;2.Engineering Research Center of Mechanical Testing Technology and Equipment (Ministry of Education ),Chongqing University of Technology ,Chongqing 400054,China )Abstract :A real-time on-board omni-vision system is developed ,which is able to realize the real-time acquisition ,transformation ,stitching and display of four channels ’video.Firstly ,the wide-an-gle camera is used to acquire real-time videos from the front ,rear ,right and the left of the vehicle.Then ,the internal and external parameters of the camera are obtained by using Zhang ’s calibration method ,and the wide-angle distorted image is corrected.By means of the inverse perspective transfor-mation ,the coordinate mapping relationship between the image coordinate and the world coordinate is established ,and the processing speed of the inverse perspective transformation is improved significant-ly by transferring it into the explicit mode of lookup table.At last ,the omni-direction videos are stitched and displayed.Experimental results show that the system has less interference and can meet real-time requirements.Key words :omni-vision real-time system;wide-angle camera;Zhang ’s calibration method;inverse perspective transformation;image mosaic(责任编辑:黎娅)(上接第89页)95。
《大型液压挖掘机工作装置的联合仿真及静动态特性研究》篇一一、引言随着现代工业技术的不断发展,大型液压挖掘机作为重要的工程机械之一,其工作装置的性能和效率成为了研究的重要方向。
为了更深入地理解其工作特性和提高工作效率,本文将对大型液压挖掘机工作装置进行联合仿真及静动态特性研究。
本文旨在通过理论分析和仿真实验相结合的方法,探讨其工作过程中的力学特性、动态响应及静态稳定性,为实际工程应用提供理论依据和技术支持。
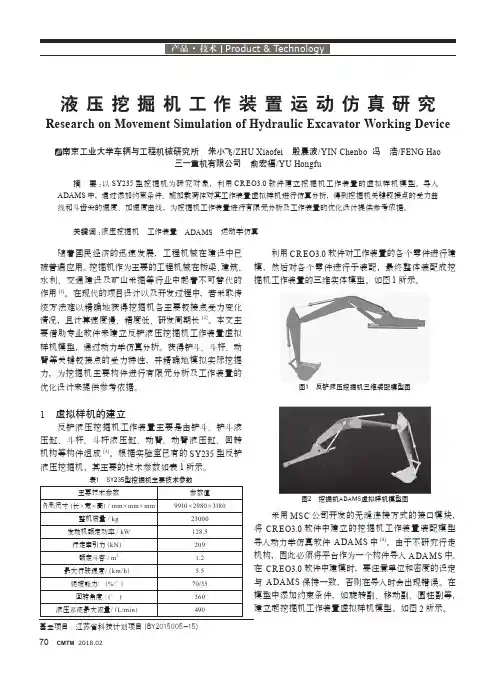
二、大型液压挖掘机工作装置概述大型液压挖掘机工作装置主要由动臂、斗杆、铲斗等部分组成,通过液压系统驱动,实现挖掘、装载等作业。
其工作性能的优劣直接影响到工程进度和效率。
因此,对其工作装置的静动态特性进行研究具有重要的实际意义。
三、联合仿真方法及模型建立本文采用联合仿真的方法,将理论分析与实际实验相结合,对大型液压挖掘机工作装置进行深入研究。
首先,建立工作装置的数学模型,包括动力学模型、液压系统模型等。
然后,利用仿真软件对模型进行仿真分析,得出工作装置在不同工况下的力学特性和动态响应。
最后,将仿真结果与实际实验数据进行对比,验证模型的准确性。
四、静动态特性研究1. 静态特性研究:在静态工况下,通过仿真和实验研究工作装置的稳定性、刚度和强度等性能指标。
分析不同结构参数和工作条件对静态特性的影响,为优化设计提供依据。
2. 动态特性研究:在动态工况下,研究工作装置的动态响应、振动特性和能量传递等。
通过仿真和实验,分析不同工况下工作装置的动态性能,为提高工作效率和减少能耗提供参考。
五、结果与分析1. 仿真结果:通过联合仿真,得出大型液压挖掘机工作装置在不同工况下的力学特性和动态响应。
仿真结果表明,工作装置在挖掘、装载等作业过程中,受力情况复杂,需要综合考虑多种因素。
2. 实验结果:将仿真结果与实际实验数据进行对比,验证了模型的准确性。
同时,通过实验观察了工作装置在实际工作中的静动态特性,为优化设计和提高工作效率提供了依据。
液压挖掘机虚拟样机建模与作业过程动态仿真罗君扬;林述温【摘要】This paper uses Pro/E software to develop the parameter model of the hydraulic Excavator and conduct the virtual assem-bly, and then complete its virtual prototype. By the kinematics simulation, it conduces to comprehend and analyses the actual process of the mechanical motion and provides the information for improving the structure design.%利用参数化设计软件Pro/E完成了液压挖掘机的参数化建模,对模型进行了虚拟装配,得到了虚拟样机模型,通过对液压挖掘机虚拟样机进行运动仿真分析,有助于理解和分析实际机械装置运动过程,并提供相应的改进机构设计的信息。
【期刊名称】《机械制造与自动化》【年(卷),期】2015(000)005【总页数】3页(P105-107)【关键词】液压挖掘机;参数化建模;运动学仿真【作者】罗君扬;林述温【作者单位】福州大学机械工程及自动化学院,福建福州350108;福州大学机械工程及自动化学院,福建福州350108【正文语种】中文【中图分类】TP391.9液压挖掘机在工业与民用建筑、道路建设、水力、矿山、市政工程等土石方施工中均占有重要位置,并反映了这些行业的施工机械化水平,是交通运输、能源开发、城镇建设以及国防施工等各项工程建设的重要施工设备,是国民经济建设迫切需要的装备。
重视和加速挖掘机改进创新,稳定提高产品品质,满足用户需求,对加速现代化工程建设有着重大的意义[1-3]。
挖掘机的设计水平关系到最终产品的品质,而设计过程中技术的先进与否、数字化程度的高低,很大程度上决定了机械产品设计开发的周期、品质和成本。
安徽建筑工业学院毕业设计 (论文)专业机械设计制造及其自动化班级 08机械(3)班学生姓名陆胜安学号 08210010343 课题挖掘机工作机构的三维建模与仿真分析指导教师李绍青2012 年 5 月20 日摘要液压挖掘机广泛应用于城市建设、道路建设、水利水电工程、矿山采掘等行业,是一种大型的工程机械,对提高劳动生产率,减轻工作强度起着关键作用。
挖掘机的工作装置是挖掘机的重要组成部分之一,研究其工作过程,对于提高挖掘机的工作效率和产品质量有着积极的意义。
而研究这一问题的最好办法就是借助虚拟样机技术。
本文首先介绍了挖掘机的工作装置,并阐述了研究挖掘机的意义和研究现状,在对挖掘机的工作装置的研究过程中引入看虚拟样机技术,并对其进行了介绍。
采用NX I-deas软件进行模型的构建,并进行了虚拟装配,建立了挖掘机的虚拟样机。
并对挖掘机的工作机构和行走机构进行了仿真分析,校验模型的准确性。
通过在ADAMS/View中对挖掘机虚拟样机机械系统工作范围的仿真分析,得到了与液压挖掘机性能相关的主要参数尺寸和工作范围的包络曲线图,说明了多液压缸复合运动的高效性。
在动力学仿真软件ADAMS中,借助NX I-deas有限元技术,建立了挖掘机的多体虚拟样机系统。
通过对系统的仿真分析,得到挖掘机大臂在工作过程中的受力变形的动态情况,从而为设计生产提供一定的依据。
关键词:液压挖掘机,工作机构,三维建模,仿真分析,NX I-deas,ADAMSAbstractHydraulic excavator are widely used in city construction, road construction, water conservancy and hydropower engineering, mine mining industries, is a large engineering machinery, to improve labor productivity and reduce working strength to play a key role. The work of an excavator device is an important component of the excavator, studies its working process, to improve the work efficiency and product excavator quality are of positive significance. But research is the best way to with the virtual prototype technology.This paper first introduced the excavator working device, and expounds the significance of the study and research status excavator, in the work of excavator device in the process of research into see virtual prototype technology, and its are introduced in this paper 。
挖掘机工作装置运动学建模与仿真徐兵;朱晓军;刘伟;刘英杰【期刊名称】《机床与液压》【年(卷),期】2011(39)9【摘要】以液压挖掘机的工作装置为目标,分析运动学三种状态空间变量间的关系,在MATLAB/Simulink仿真环境下对系统进行运动学建模与仿真.通过给定铲斗末端轨迹,求解分析同转马达、动臂油缸、斗杆油缸和铲斗油缸的位移变化关系以及给定执行器位移变化图求解末端轨迹,验证了运动学模型的正确性.基于正运动学分析和装置工作原理,实现了工作空间包络图的快速绘制.%To analyze the relationships of the variables from three different state spaces in kinematics,the kinematics model of an excavator working device was built in Matlab/Simulink.Giving a trajectory of the bucket tooth,the varied displacement relations of the motor,the arm cylinder,the boom cylinder and the bucket cylinder were obtained.Giving the varied displacement of the actuator,the track of the bucket tooth was obtained.The validity of the kinematics model was verified.Based on the analysis of forward kinematics and working principles of the working device,device,the working space envelope diagram of an excavator was drawn rapidly and exactly.【总页数】4页(P97-99,131)【作者】徐兵;朱晓军;刘伟;刘英杰【作者单位】浙江大学流体动力与机电系统国家重点实验室,浙江杭州310027;浙江大学流体动力与机电系统国家重点实验室,浙江杭州310027;浙江大学流体动力与机电系统国家重点实验室,浙江杭州310027;浙江大学流体动力与机电系统国家重点实验室,浙江杭州310027【正文语种】中文【中图分类】TD422.2【相关文献】1.步履式挖掘机工作装置运动学建模及仿真 [J], 陈秀峰2.挖掘机工作装置的运动学建模与仿真 [J], 袁开磊3.D-H坐标系下挖掘机工作装置运动学建模与仿真 [J], 陈支;邹树梁;唐德文;谢宇鹏4.基于D-H矩阵的挖斗可偏转挖掘机工作装置运动学建模与分析 [J], 张晴晴;谢傲;龚智强5.挖掘机工作装置的运动学建模与仿真 [J], 袁开磊;史青录;曲德韵因版权原因,仅展示原文概要,查看原文内容请购买。
第6期(总第163期)2010年12月机械工程与自动化M ECHA N ICAL EN GI NEER IN G & AU T O M A T IO N N o.6Dec.文章编号:1672-6413(2010)06-0072-02液压挖掘机的三维实体造型以及运动学仿真李 琴(攀枝花学院先进制造技术研究所,四川 攀枝花 617000)摘要:通过P ro /E 建立了液压挖掘机工作装置的三维实体模型,并用专用接口M echpro 2005将模型导入A DA M S 中进行运动学仿真,得到了挖掘机空载时关键位置点的位移、速度和加速度,为挖掘机的优化设计以及性能分析提供了参考。
关键词:虚拟样机;液压挖掘机;运动仿真中图分类号:T U 621∶T P391.9 文献标识码:A收稿日期:2010-05-10;修回日期:2010-07-23作者简介:李琴(1977-),女,四川成都人,讲师,硕士。
0 引言液压挖掘机作为工程机械的主要机种之一,广泛应用于工业与民用建筑、交通运输、水利电力工程、矿山采掘等机械化施工中。
而对液压挖掘机的设计,传统方法是设计-样机制造-试验,不但设计周期长、成本高,且试验破坏性较大,有时甚至可能会造成重大事故。
利用三维实体建模与动态仿真技术相结合,预先建立起实体仿真模型,模拟其动态特性,让设计者尽早发现问题并及时修改和优化,这样既能缩短产品的设计周期、提高产品的可靠性,又能实现产品的优化设计。
1 挖掘机三维实体模型的建立本文以某单斗反铲液压挖掘机为例,建立实体模型。
在建立液压挖掘机虚拟样机时,根据研究对象、研究目的的不同可对系统的仿真模型进行简化处理,但机械系统和液压系统的仿真模型必不可少[1]。
按照是否存在相对运动(暂不考虑行走运动)将挖掘机划分为上部转台、下车、动臂、斗杆、铲斗、铲斗摇杆、铲斗连杆、动臂液压缸、动臂液压活塞杆、斗杆液压缸、斗杆液压活塞杆、铲斗液压缸、铲斗液压活塞杆共13个大运动部件。