感应垃圾桶电机参数
- 格式:docx
- 大小:726.21 KB
- 文档页数:3
感应垃圾桶工作原理随着科技的不断发展,智能家居产品的出现已经成为现代生活的一部分。
其中,感应垃圾桶作为智能家居的一种,被越来越多的人所接受和使用。
感应垃圾桶的工作原理也是人们关注的焦点之一。
感应垃圾桶的工作原理可以简单概括为:通过感应装置检测到人体接近垃圾桶,然后自动打开垃圾桶的盖子,等待人们将垃圾丢进去,接着自动关闭垃圾桶的盖子。
这样的设计不仅方便了人们的使用,同时也提高了垃圾分类的效率。
感应垃圾桶主要由感应装置、控制器和执行器三部分组成。
感应装置是感应垃圾桶的核心部件,它通过红外线、超声波或者雷达等技术来检测人体的接近。
当感应装置检测到人体接近垃圾桶时,会向控制器发送信号。
控制器是感应垃圾桶的大脑,它接收到感应装置发送的信号后,会根据预设的程序进行判断和控制。
控制器会根据人体的接近情况来判断是否打开垃圾桶的盖子。
当人体离开垃圾桶一定距离后,控制器会再次发出信号,让执行器关闭垃圾桶的盖子。
执行器是感应垃圾桶的执行部件,它根据控制器的指令来打开或关闭垃圾桶的盖子。
执行器通常采用电动机或者气动装置来实现。
当控制器判断需要打开垃圾桶的盖子时,执行器会启动,将盖子打开。
同样,当控制器判断需要关闭垃圾桶的盖子时,执行器会将盖子关闭。
感应垃圾桶的工作原理简单明了,但在实际应用中,还有一些细节需要注意。
首先,感应装置的灵敏度需要适当调整,以免误检测或漏检测。
其次,垃圾桶的盖子需要设计合理,既要方便人们将垃圾丢进去,又要保证垃圾不会外溢。
此外,垃圾桶的电源供应也需要注意,可以采用电池或者外接电源等方式。
感应垃圾桶的出现,不仅提高了人们丢垃圾的便利性,也增强了人们对环境保护的意识。
通过感应垃圾桶,人们可以更加方便地进行垃圾分类,促进垃圾资源的再利用。
感应垃圾桶的智能化设计,也为人们创造了更加舒适的生活环境。
总的来说,感应垃圾桶的工作原理是通过感应装置检测人体接近,然后控制执行器打开或关闭垃圾桶的盖子。
它的出现不仅方便了人们的生活,也推动了垃圾分类和环境保护的发展。
• 157•在现如今的日常生活中,我们每天都会产生垃圾。
而垃圾桶有各式各样的,很少有人愿意去打开脏兮兮的翻盖垃圾桶,以至于有些人就把垃圾扔再垃圾桶旁的地面上。
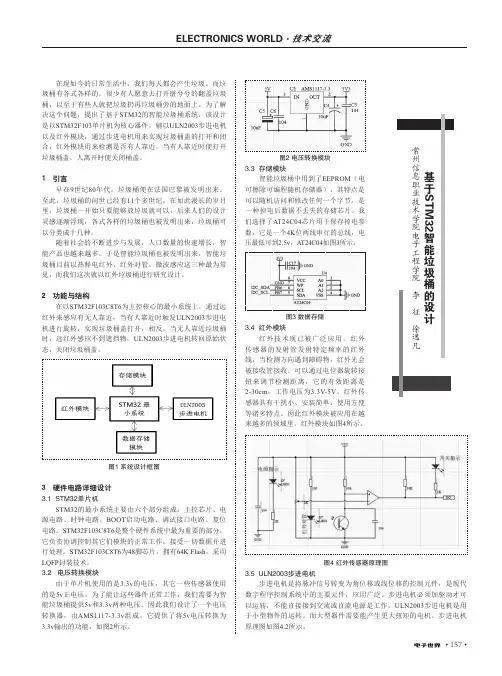
为了解决这个问题,提出了基于STM32的智能垃圾桶系统,该设计是以STM32F103单片机为核心器件,辅以ULN2003步进电机以及红外模块,通过步进电机用来实现垃圾桶盖的打开和闭合,红外模块用来检测是否有人靠近,当有人靠近时便打开垃圾桶盖,人离开时便关闭桶盖。
1 引言早在9世纪80年代,垃圾桶便在法国巴黎被发明出来。
至此,垃圾桶的问世已经有11个多世纪,在如此漫长的岁月里,垃圾桶一开始只要能够放垃圾就可以,后来人们的设计灵感逐渐浮现,各式各样的垃圾桶也被发明出来,垃圾桶可以分类成十几种。
随着社会的不断进步与发展,人口数量的快速增长,智能产品也越来越多,于是智能垃圾桶也被发明出来,智能垃圾桶目前以热释电红外、红外对管、微波感应这三种最为常见,而我们这次就以红外垃圾桶进行研究设计。
2 功能与结构在以STM32F103C8T6为主控核心的最小系统上,通过远红外来感应有无人靠近,当有人靠近时触发ULN2003步进电机进行旋转,实现垃圾桶盖打开,相反,当无人靠近垃圾桶时,远红外感应不到遮挡物,ULN2003步进电机转回原始状态,关闭垃圾桶盖。
图1 系统设计框图3 硬件电路详细设计3.1 STM32单片机STM32的最小系统主要由六个部分组成:主控芯片、电源电路、时钟电路、BOOT 启动电路、调试接口电路、复位电路。
STM32F103C8T6是整个硬件系统中最为重要的部分,它负责协调控制其它们模块的正常工作,接受一切数据并进行处理。
STM32F103C8T6为48脚芯片,拥有64K Flash ,采用LQFP 封装技术。
3.2 电压转换模块由于单片机使用的是3.3v 的电压,其它一些传感器使用的是5v 正电压,为了能让这些器件正常工作,我们需要为智能垃圾桶提供5v 和3.3v 两种电压。
永磁电机参数
永磁电机的参数主要包括以下几个方面:
1. 额定功率(Rated Power):电机能够持续输出的功率,通常以千瓦(kW)为单位。
2. 额定转速(Rated Speed):电机在额定负载下的旋转速度,通常以转每分钟(rpm)为单位。
3. 额定转矩(Rated Torque):电机在额定负载下所能输出的转矩,通常以牛顿米(N·m)为单位。
4. 额定电压(Rated Voltage):电机所需的输入电压,通常以伏特(V)为单位。
5. 频率(Frequency):交流电机的输入频率,通常为50或60赫兹(Hz)。
6. 效率(Efficiency):电机的转换效率,即输出功率与输入功率之间的比值,通常以百分比表示。
7. 发热量(Heat Dissipation):电机在运行过程中产生的热量。
发热量通常由散热器或风扇来进行散热。
8. 转子惯量(Rotor Inertia):电机转子的惯性矩,影响电机的加速和减速性能。
9. 负载扭矩(Load Torque):电机所连接负载所产生的阻力扭矩。
10. 控制方法(Control Method):电机的控制方式,包括直流电机、交流电机以及特定的控制算法,如矢量控制或感应控制等。
需要注意,具体的永磁电机参数会因制造商、型号和应用领域的不同而有所差异。
在选择和应用永磁电机时,还需要考虑其他因素,如环境条件、安装方式、保护等级等。
对于具体的永磁电机参数和技术规格,建议参考电机制造商提供的产品文档或技术规格表。
龙岩学院毕业设计题目:基于单片机的智能垃圾桶设计专业:电子信息工程学号:作者:指导教师(职称):二〇一六年五月二十三日基于单片机的智能垃圾桶设计【摘要】本文提出一种基于单片机STC89C51的智能垃圾桶的设计。
系统主要由超声波测量距离模块、光电感应模块、电机模块和语音提示模块等功能模块组成,以单片机为控制器,通过超声波传感器、光电传感器来获取距离数据,再通过数模转换及单片机处理后发出相应的命令,外围电路执行相应的动作,假设当超声波传感器检测到人距离垃圾桶的距离小于设定距离时,电机转动垃圾桶盖自动翻开;如果光电传感器检测到垃圾桶装满,系统就会有语音进行提示;在规定时间对垃圾桶进行喷洒消毒剂消毒。
本设计与传统垃圾桶相比,不仅结构简单、性能稳定,且具有操作方便、低成本、智能化等优点,能有效提高垃圾分类的效率,是减少环境污染的一个可行的措施。
【关键词】单片机光电传感器超声波传感器智能垃圾桶Design of Intelligent Garbage Bin Based on SingleChip Microcomputer【Abstract】 This paper is a design of intelligent ashbin based on MCU STC89C51, which is composed of ultrasonic distance measuring module, photoelectric sensor module, motor module and the voice prompt module function module. With MCU as the controller, ultrasonic sensors and photoelectric sensors are used to obtain the distance data, and then issue the corresponding command through the digital to analog conversion and single chip processing and peripheral circuits execute corresponding action, hypothesis when the ultrasonic sensor etects that the distance between the people and the garbage bin is smaller than the set distance, the motor rotates a trash can lid opens automatically, if full of photoelectric sensor detection to the garbage can, the system will have the voice prompt and can be sprayed disinfectant for the garbage in the prescribed time . Compared with the traditional garbage can, the design has the advantages of simple structure, stable performance, convenient operation, low cost, intelligent, etc., and can effectively improve the garbage classification and reduce the environmental pollution.【Key Words】singlechip Photoelectric sensor ultrasonic sensor Intelligent garbage can目录第1章绪论 (1)1.1 选题意义 (1)1.2 发展现状及趋势 (1)1.3 课题的主要内容 (2)1.3.1 课题内容 (2)1.3.2 设计内容 (2)1.4 本章小结 (2)第2章系统硬件电路 (3)2.1 系统总体框架 (3)2.2 单片机最小系统 (3)2.2.1 STC89C51RC单片机简介 (3)2.2.2 复位电路 (4)2.3 光电传感器模块 (5)2.4 电机模块 (6)2.5 超声波测距模块 (7)2.6 语音模块 (8)2.7 喷洒消毒剂电路 (8)2.8 本章小结 (9)第3章系统软件设计 (10)3.1 系统总体程序设计流程图 (10)3.2 超声波检测程序设计 (11)3.3 语音模块的程序设计 (12)3.4 自动消毒的程序设计 (13)3.5 本章小结 (13)第4章系统调试 (14)4.1 硬件调试 (14)4.2 软件调试 (14)第5章成品模拟及设计总结 (16)5.1 成品模拟 (16)5.2 设计总结 (18)致谢 (20)参考文献 (21)附录一 (22)附录二 (23)第1章绪论1.1选题意义现如今,垃圾存在于我们生活各个方面,同样也影响我们生活的各个方面,倘若不能及时有效地解决,将会带来相当棘手的问题。
DOI:10.19551/ki.issn1672-9129.2021.10.063基于STM32单片机的智能垃圾桶设计王一航1,2㊀王若彤1,2㊀葛子轩1,3(1.华北理工大学机电创新设计实验室㊀河北㊀唐山㊀063210;2.华北理工大学以升创新教育基地㊀河北㊀唐山㊀063210;3.华北理工大学电气工程学院㊀河北㊀唐山㊀063210)摘要:这个项目是基于STM32单片机设计的智能垃圾桶,本项目将智能化和便捷化的设计理念㊂本项目分为无线感应模块㊁红外控制模块㊁蜂鸣器模块㊁温度感应模块以及数码管显示模块㊂可以实现人手靠近自动开盖㊁红外遥控控制开盖㊁满桶报警㊁温度检测与显示等功能,经过测试之后,产品功能稳定,智能化程度高,可以方便人们的生活,有一定的实用价值㊂关键词:单片机;无线感应;远程操控;智能化中图分类号:TP368.1;X799.3㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-9129(2021)10-0068-01㊀㊀引言㊂目前,随着智能化和个性化的不断进步,智能家居这一理念开始被大多数人接受㊂智能垃圾桶也随之出现,现存的大部分智能垃圾桶功能单一,仅能实现自动开盖的功能㊂本文在现有智能垃圾桶的基础上进行改进提高㊂利用无线模块检测,当距离30cm之内时,自动打开垃圾桶盖,人离开后闭合,也可以用红外遥控控制开闭㊂同时利用红外对管检测垃圾是否装满并实现装满报警㊂还可以实时将温度显示在数码管上㊂1㊀硬件系统设计1.1主控芯片㊂这个项目计划使用的一套半导体芯片,它具有微芯片的属性,因为它被称为单片机,即 单人芯片微电脑 ㊂通过多种通用交流方式,如USART㊁SPI等,可连接很多传感器,可以控制很多设备㊂现实生活中有许多我们大家都接触过的电子产品,例如智能手环㊁智能家居㊁智能车等等㊂在本项目中使用了STM32F103ZET6芯片,它高集成,低功耗,多IO的特点可以很好地满足项目需要㊂1.2㊀HC-SR04模块㊂本产品使用了HC-SR04超声波测距模块可以检测2厘米到4米的距离内的物体距离,测量精准度较高;此模块由超声波发射器㊁接收器与集成控制电路构成㊂主要应用包括测距,避障等㊂可以实现避障小车的障碍物检测,超声波测距,物体接近报警等功能㊂在本项目中主要用于检测是否有物体靠近垃圾桶㊂给单片机反馈,从而实现自动开关垃圾桶盖的功能㊂1.3㊀SG90舵机模块㊂舵机主要是由外包装㊁高集成电路板㊁低功耗马达㊁减速器与具有位置检测功能的元件所构成㊂它运行的原理是通过集成的接收器将信号传给舵机,再由驱动模块驱动电机运动,在通过齿轮结构带动机械臂转动,同时通过返回的信号判断是否摆动到位置㊂位置检测器是一个可变电阻,所以可以根据阻值不同来判断转角㊂物体转动惯量和质量成正比例关系,所以可以推断出推动物体转动的力和质量也成正比㊂舵机为了追求小功耗所以设计成空心,这就是空心杯马达㊂在本项目中主要用于接收单片机传输的信号,带动垃圾桶盖得打开和关闭㊂1.4红外对管㊂红外对管是一种很常用的检测仪器,主要应用于红外发射管和红外接收管㊂具有成本低,灵敏度高,稳定性高的特点㊂在本项目中主要应用于垃圾高度的检测,以实现垃圾装满提示的功能㊂2㊀软件系统设计2.1垃圾桶盖的自动开关㊂HC-SR04无线模块作为检测器,向外发出超声波并接收反馈信号,并将反馈信号通过PC2口传给单片机,通过代码换算将反馈信号转化为以毫米为单位的距离信息㊂如果检测到物体距离距离小于300毫米㊂将舵机标志位flag置1㊂舵机打角90度㊂维持4秒后将标志位清零㊂垃圾桶盖关闭㊂2.2红外对管检测垃圾是否装满㊂红外对管原理简单,几厘米内检测到物体则传回高电平,否则传回低电平[1]㊂利用PB2接收红外对管返回信号,当垃圾与红外对管达到同一水平位置,则将高电平通过IO口反馈给单片机㊂此时单片机会将将蜂鸣器标志位置1,使蜂鸣器发出提示㊂2.3寻迹移动㊂利用红外遥控与单片机通信,按下前进键,对两个电机输入相同的正转PWM㊂后退则输入反向PWM㊂左转令左轮反转,右轮正转,通过差速实现转向,右转则令右轮反转,左轮正转来实现右转[2~3]㊂定速巡航通过提前设定好轨迹来实现,主要需要设置的参数包括巡航触发条件,行进方向,转向位置等㊂3㊀结束语本项目在设计过程中出现了舵机模块选择动力不足导致无法开盖,此问题通过更换大功率舵机解决㊂还出现了差速转向垃圾桶桶体失衡的问题,几次尝试后通过加装辅助轮达成正三角稳定结构来实现㊂外壳设计采用PCB材质,成本低,硬度高,质量好㊂综上,我们所设计的智能垃圾桶可以满足人们对智能化,舒适化家居的需求㊂可以实现垃圾桶盖的自动开关,垃圾检测以及装满报警报警,自动寻迹的功能㊂具有一定的价值㊂参考文献:[1]沈勤丰.信息管理系统应用于静脉输液监护的研究与实现[J].软件工程师,2014,17(05):44-46+17. [2]张凌雪.基于STM32F103的智能小车设计[J].农家参谋,2020(23):106.[3]徐作成,黄姗,王菁华,吴雨霖,李渊.基于嵌入式的智能小车无线控制系统设计[J].轻工科技,2021,37(04): 109-110.DOI:10.19551/ki.issn1672-9129.2021.10.064浅谈软件UI设计的课程教学应用陈㊀鹏(浙江工贸职业技术学院㊀温州㊀325026)摘要:用户界面(UI)是用户与计算机软件之间的交互点㊂智能软件应用的成败取决于用户界面设计(UID)㊂使用软件的可能性㊁易用性和学习都受UID的影响㊂用户界面是教育软件(e-Learning)设计的重要组成部分㊂在电子学习的UID中,除UID原则外,还应考虑学习的原则和概念㊂在这方面,我们首先回顾了以往研究中提出的问题,以明确教育㊁学习㊁用户设计和多媒体之间的逻辑关系,然后探讨了电子学习和用户设计的基本概念㊂关键词:软件UI设计;课程教学;应用研究中图分类号:G71㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-9129(2021)10-0068-02㊀㊀1㊀软件UI设计课程教学应用研究现状近二十年来,由于信息通信技术的影响,教与学发生了很大的变化㊂这些变化的最重要结果是电子教育的不断扩大㊂应根据学习者的心理特点开发网络化学习工具㊂关于学习的本质和影响学习的因素已经做了许多研究㊂显然,每一个电子学习的设计都应该深入考虑这些研究㊂此外,传统教育(非电子)问题的原则,也必须采取在线学习的一些调整㊂尽管如此,这样的适应引起了一些新的问题,这些问题可能与远程学习的本质相冲突㊂在电子学习中,应该考虑的心理问题之一是用户界面(UI),因为UI是用户和教育主体之间的交互点㊂如果这种相互关系不成功,即使教育内容选择得很好,而且用户愿意学习,教育目标也可能无法实现㊂㊃86㊃。
2mw双馈双馈感应风力发电机参数
2MW双馈感应风力发电机参数主要包括额定输出功率、额定电压、转子开路电压、功率因数、额定频率、绝缘等级、防护等级、额定转速、定子接线方式、转子接线方式、转速范围、质量、工作制、安装方式、旋转方向、效率等。
以SKYF2100/4型号的2MW双馈异步发电机为例,其额定输出功率为2100kW,定子额定电压为690V,转子开路电压约1894V,功率因数可在(ind)~~(cap)之间调节,额定频率为50Hz,绝缘等级为H级,防护等级为IP54,额定转速为1780r/min,定子接线方式为Y,转子接线方式也为Y,转速范围在900r/min~2000r/min之间,质量≤。
该电机的安装方式是IM 1001(B3),旋转方向从轴伸端看为时针CW,效率为%,并网点的电压波形畸变率<4%。
此外,此电机是空空冷双馈风力发电机,配套于2MW变速型双馈风力发电机组。
电机采用H级绝缘系统、真空压力浸漆,绝缘系统可承受较高的尖峰电压;转子采用高速动平衡技术,可承受突发故障引起的超速运转;采用以特殊通风叶片为主体的低阻风道,有效提高冷却系统效率;通过模态仿真优化与实验验证相结合,实现电机低温升、低噪音、低振动。
如需了解更多参数详情,可以访问生产厂家的官方网站,查看详细的规格说明或技术规格书。
基于单片机的智能垃圾桶设计一、引言随着人们生活水平的提高和环保意识的增强,对垃圾处理的要求也越来越高。
传统的垃圾桶功能单一,无法满足人们对于垃圾分类、自动感应、远程监控等方面的需求。
因此,设计一款基于单片机的智能垃圾桶具有重要的现实意义。
二、智能垃圾桶的功能需求分析(一)自动感应开盖当有人靠近垃圾桶时,能够自动感应并打开盖子,避免人们用手直接接触垃圾桶,减少细菌传播。
(二)垃圾分类功能将垃圾桶分为可回收垃圾、有害垃圾、厨余垃圾和其他垃圾等不同的区域,并通过传感器或识别技术对投入的垃圾进行分类判断。
(三)满溢检测能够实时检测垃圾桶内垃圾的堆积高度,当垃圾桶即将满溢时,及时发出提醒信号,方便工作人员及时清理。
(四)远程监控通过网络连接,将垃圾桶的状态信息(如垃圾满溢情况、使用频率等)传输到远程监控平台,方便管理人员进行统一管理和调度。
(五)语音提示对用户进行垃圾分类的语音提示,提高垃圾分类的准确性。
三、系统硬件设计(一)单片机选型选择一款性能稳定、功耗低、接口丰富的单片机,如STM32 系列。
STM32 系列单片机具有较高的性价比和广泛的应用案例,能够满足智能垃圾桶的控制需求。
(二)传感器模块1、人体感应传感器采用红外传感器或微波传感器,检测人体的接近,实现自动开盖功能。
2、垃圾满溢检测传感器使用超声波传感器或红外测距传感器,测量垃圾桶内垃圾的堆积高度,判断是否满溢。
3、垃圾分类识别传感器可以使用图像识别传感器或重量传感器等,对投入的垃圾进行分类判断。
(三)执行机构1、电机驱动模块用于控制垃圾桶盖子的开启和关闭,选用合适的电机和驱动芯片,如 L298N 驱动芯片。
2、语音模块选用语音芯片,如 ISD1820,实现垃圾分类的语音提示功能。
(四)通信模块选择 WiFi 模块或蓝牙模块,将垃圾桶的状态信息传输到远程监控平台或手机 APP 上。
(五)电源模块为整个系统提供稳定的电源供应,可以使用电池供电或外接电源适配器。
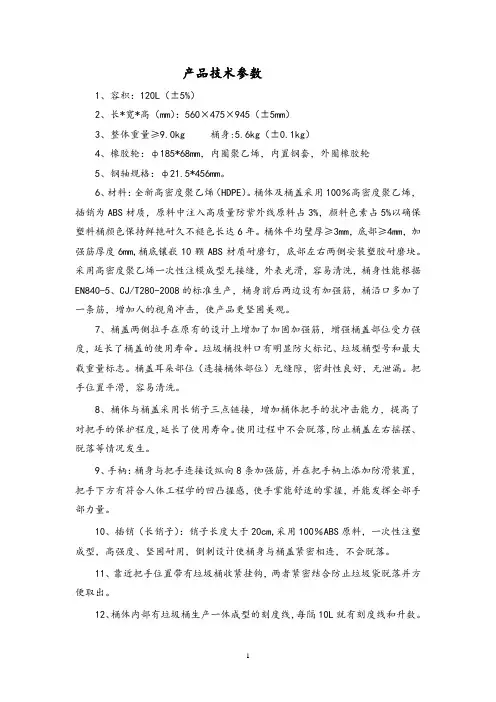
产品技术参数1、容积:120L(±5%)2、长*宽*高(mm):560×475×945(±5mm)3、整体重量≥9.0kg 桶身:5.6kg(±0.1kg)4、橡胶轮:ф185*68mm,内圈聚乙烯,内置钢套,外圈橡胶轮5、钢轴规格:ф21.5*456mm。
6、材料:全新高密度聚乙烯(HDPE)。
桶体及桶盖采用100%高密度聚乙烯,插销为ABS材质,原料中注入高质量防紫外线原料占3%,颜料色素占5%以确保塑料桶颜色保持鲜艳耐久不褪色长达6年。
桶体平均壁厚≥3mm,底部≥4mm,加强筋厚度6mm,桶底镶嵌10颗ABS材质耐磨钉,底部左右两侧安装塑胶耐磨块。
采用高密度聚乙烯一次性注模成型无接缝,外表光滑,容易清洗,桶身性能根据EN840-5、CJ/T280-2008的标准生产,桶身前后两边设有加强筋,桶沿口多加了一条筋,增加人的视角冲击,使产品更坚固美观。
7、桶盖两侧拉手在原有的设计上增加了加固加强筋,增强桶盖部位受力强度,延长了桶盖的使用寿命。
垃圾桶投料口有明显防火标记、垃圾桶型号和最大载重量标志。
桶盖耳朵部位(连接桶体部位)无缝隙,密封性良好,无泄漏。
把手位置平滑,容易清洗。
8、桶体与桶盖采用长销子三点链接,增加桶体把手的抗冲击能力,提高了对把手的保护程度,延长了使用寿命。
使用过程中不会脱落,防止桶盖左右摇摆、脱落等情况发生。
9、手柄:桶身与把手连接设纵向8条加强筋,并在把手柄上添加防滑装置,把手下方有符合人体工程学的凹凸握感,使手掌能舒适的掌握,并能发挥全部手部力量。
10、插销(长销子):销子长度大于20cm,采用100%ABS原料,一次性注塑成型,高强度、坚固耐用,倒刺设计使桶身与桶盖紧密相连,不会脱落。
11、靠近把手位置带有垃圾桶收紧挂钩,两者紧密结合防止垃圾袋脱落并方便取出。
12、桶体内部有垃圾桶生产一体成型的刻度线,每隔10L就有刻度线和升数。

伺服电机的一些常用参数伺服电机是一种可控制转速和位置的电动机,广泛应用于工业自动化、机器人、医疗设备等领域。
以下是一些常用的伺服电机参数:1. 额定转矩(Rated Torque):伺服电机能够承受的最大转矩。
通常以牛顿米(Nm)作为单位表示。
2. 额定速度(Rated Speed):伺服电机的额定输出转速。
通常以转/分钟(RPM)作为单位表示。
3. 额定功率(Rated Power):伺服电机持续工作时的额定输出功率。
通常以瓦特(W)作为单位表示。
4. 编码器分辨率(Encoder Resolution):编码器是伺服电机用来反馈转子位置的装置。
分辨率表示编码器每个脉冲所对应的位置变化量,可以用脉冲数或角度表示。
5. 峰值转矩(Peak Torque):伺服电机能够短时间内提供的最大转矩。
通常比额定转矩大。
6. 动态响应(Dynamic Response):伺服电机响应外部输入信号的能力。
常用参数包括加速时间、减速时间、过冲量等。
7. 零偏误差(Position Error):伺服电机实际位置与控制指令位置之间的差值。
通过控制算法和编码器反馈可以减小零偏误差。
8. 额定电压(Rated Voltage):伺服电机正常工作时的电源电压。
9. 额定电流(Rated Current):伺服电机在额定电压下的工作电流。
10. 转子惯量(Rotor Inertia):伺服电机转子的惯性矩,用于描述电机的加速和减速能力。
通常以千克·米²(kg·m²)作为单位表示。
11. 反馈系统(Feedback System):伺服电机用于测量位置、速度和转矩的传感器系统,常见的反馈设备包括增量式编码器、绝对式编码器和霍尔效应传感器。
12. 控制方式(Control Mode):伺服电机常见的控制方式包括位置控制、速度控制和转矩控制。
13. 过载能力(Overload Capacity):伺服电机能够短时间内承受超过额定转矩的能力。
环卫所垃圾桶技术参数及要求
以上★号项不接受负偏离。
一、交货期:
合同签订后15天内完成。
二、质保要求:
1、质保期:2年
2、垃圾桶整体:耐寒性-30℃/4h,耐热性:120℃/4h,外观无变化,抗冷热、抗老化、抗褪色等理化性能稳定,能够确保色彩艳丽,至少两年以上不褪色。
3、中标方提供的货物必须是符合国家检测标准,产品的颜色、规格必须与采购方的要求一致。
三、付款方式:
全部验收合格,支付合同总价80%,质保期满后付清余款 20%.
四、其他说明
1、投标时须分别提供100L和240L垃圾桶样品。
2、垃圾桶中标价格包括一切费用,采购方不再支付其他费用。
3、采购垃圾桶按照采购单位要求,分批运送。
4、垃圾桶整体采用绿色,垃圾桶上的标识,根据采购方要求统一印制。
智能垃圾桶系统的设计毕业论文摘要:随着城市化进程的加速和人们生活水平的提高,垃圾产生量日益增加,对环境和公共卫生带来了巨大压力。
传统垃圾桶在垃圾管理方面存在诸多不足,智能垃圾桶系统的出现为解决这些问题提供了新的思路和方法。
本文旨在设计一种智能垃圾桶系统,以提高垃圾处理的效率和环保水平。
关键词:智能垃圾桶;传感器;自动控制;环保一、引言垃圾处理是城市管理和环境保护中的重要问题。
传统垃圾桶往往需要人工巡检和清理,不仅效率低下,而且容易造成垃圾满溢和环境污染。
为了改善这种状况,智能垃圾桶系统应运而生。
智能垃圾桶系统通过运用先进的技术,实现对垃圾桶状态的实时监测和自动控制,从而提高垃圾处理的效率和质量。
二、智能垃圾桶系统的总体设计(一)系统功能需求分析智能垃圾桶系统应具备以下功能:1、自动感应开盖:当有人靠近垃圾桶时,能够自动打开桶盖,避免人手接触垃圾桶,减少细菌传播。
2、垃圾满溢检测:能够实时检测垃圾桶内垃圾的填充程度,当垃圾达到一定容量时,及时发出信号通知清理人员。
3、自动压缩:对于可压缩的垃圾,如塑料瓶、纸盒等,能够自动进行压缩,增加垃圾桶的存储空间。
4、异味处理:能够对垃圾桶内的异味进行处理,保持周围环境的清新。
5、远程监控:管理人员可以通过网络远程监控垃圾桶的状态和位置,方便进行管理和调度。
(二)系统结构设计智能垃圾桶系统主要由以下几个部分组成:1、传感器模块:包括红外传感器、压力传感器、气体传感器等,用于检测垃圾桶的状态和环境信息。
2、控制模块:负责接收传感器的数据,并根据预设的算法进行处理和控制。
3、执行模块:包括电机、压缩机、风扇等,用于执行开盖、压缩、异味处理等操作。
4、通信模块:用于将垃圾桶的状态信息传输到远程监控平台,实现远程监控和管理。
5、电源模块:为整个系统提供稳定的电源。
三、硬件设计(一)传感器的选择与安装1、红外传感器:安装在垃圾桶的上方,用于检测人体的靠近,实现自动开盖功能。
智能垃圾桶的设计与原理分析摘要:设计了一种基于遥感技术的自动分类垃圾桶,采用多种传感器进行垃圾分类。
传感器将对湿度的感知信号反馈给微型处理器STM32F104,处理器控制电机使相应湿度的垃圾进入对应的存储区域。
垃圾桶设计了可更换桶身的结构,同时桶盖和门阀的开启都由电动机驱动控制。
垃圾桶移动底盘利用由万向轮和两个驱动轮组成,使得垃圾桶可全方位进行移动,并可自主避障。
该垃圾桶提高了垃圾分类效率,节约了时间,使垃圾分类向机械化、智能化发展。
关键词:垃圾桶;自主避障;自动分类Abstract: An automatic classification trash bin based on remote sensing technology is designed, and a variety of sensors are used for garbage classification. The sensor feeds back the humidity sensing signal to the microprocessor STM32F104, and the processor controls the motor to make the garbage with the corresponding humidity enter the corresponding storage area. The trash can is designed with a structure that can replace the barrel body, and the opening of the lid and the door valve are all driven and controlled by a motor. The mobile chassis of the trash can is composed of universal wheels and two driving wheels, so that the trash can can be moved in all directions and can avoid obstacles autonomously. The garbage can improves the efficiency of garbage classification, saves time, and makes garbage classification mechanized and intelligent.Key words: trash can; Autonomous obstacle avoidance; automatic classification近年来,随着我国的经济高速发展,人们生活水平不断提高,但随之而来的便是大量垃圾的产生以及部分可回收垃圾的浪费。
摘要在深入研究了现在垃圾箱的现状和市场需求后,我们设计出了基于NRF24L01的智能移动垃圾箱系统。
该垃圾箱具有可移动、自动清扫、信息显示、应急照明、太阳能充电、自动开盖、自动倒垃圾等特点。
系统的电源采用硬件自动控制,市电变压充电与太阳能充电相结合,同时采用了大容量铅酸蓄电池作为电能储备,保证系统的正常运行。
通过运用单片机和各种传感器的使用与NRF24L01无线传输模块相结合,构筑了一个垃圾箱与基站相呼应的智能垃圾箱系统。
使得整个系统更加的完整、统一和智能化。
该智能垃圾箱着眼于公共场所的智能垃圾箱需求,又具有智能化程度高、成本较低、实用性强、性能可靠等优点,为构建数字智能化社会贡献力量。
关键词:智能,NRF24L01,移动垃圾箱,单片机,太阳跟踪。
第一章前言1.1垃圾箱现状垃圾桶是人们生活中“藏污纳垢”的容器。
垃圾桶是社会文化的一种折射。
中文名称:垃圾桶。
一种专门盛放垃圾、废弃物的容器。
也有不少称作“垃圾箱”英文名称:garbage can /dustbin垃圾桶就使用场合可分为公共垃圾桶和家庭垃圾桶。
就盛放垃圾形式可分为独立垃圾桶和分类垃圾桶。
就加工材料可分为塑料垃圾桶、不锈钢垃圾桶、陶瓷垃圾桶、木质垃圾桶、水泥垃圾桶和纸浆垃圾桶等等。
就开启方式有敞口式、揭盖式、踩踏开盖、感应式(红外线)等。
公共垃圾桶,公共垃圾桶对环境有特殊的要求:在室外自然条件下能耐高低温,有足够的机械强度和良好的冲击韧性。
易清洁能够与环境融合。
据调查,现在使用的垃圾箱主要存在以下问题:1、垃圾桶对垃圾的密封效果不好,导致垃圾桶附近异味较大,并且极易滋生细菌、寄生虫等,对人们的健康造成较大的危害。
2、现有的垃圾桶不能自动处理桶内垃圾,经常出现大量垃圾溢出垃圾桶的现象,影响环境卫生,造成污染,危害人们的健康。
3、现有的垃圾桶不能及时封装桶内垃圾,垃圾长时间裸露在外,环卫工人处理垃圾时与垃圾直接接触,增大环卫工人患病几率。
4、现有的垃圾箱可移动性差,一般安装固定死。
电机型号28JX10K27G/2838-12130永磁直流行星减速电机产品特征:电机直径28mm,出轴直径6mm D 型轴轴长18mm 中心出轴,电机长度74mm 总长92mm(总长等于轴长+电机机身长度)产品特点: 机身短高转速有刷直流电机配合大减速比得到大转矩功率大缺点:噪音比普通低速电机要大一点电机基本参数;额定电压12VDC负载电流0.8A(堵转电流3A)输出功率10W(瓦)空载转速450转/分负载转速350转左右减速比1:27额定转矩5--10Kg.cm最大负载10Kg.cm(行星减速器齿轮为钢齿结构,能承受超大负载)安装尺寸图纸;L=36mm宝贝信息:E18-F10NK是一种集发射与接收于一体的色标传感器,类型为:NPN常开型输出。
单色光源经过调制后发出,被检测物反射后,经接收头对进行解调输出。
有效的避免了环境可见光的干扰。
双透镜的使用,延长了传感器的检测距离。
另外在实际使用中,还可以通过传感器尾部的电位器旋钮改变传感器的探测范围。
本色标传感器,具有探测距离远、不受可见光干扰、易于装配、使用方便等特点,可以被应用于物品定位、颜色识别等用途,可以用作广告卷帘灯箱、包装机、切割机等多种生活化工产品上。
色标传感器就其原理来说并不是检测颜色,它是通过检测色标对光束的反射或吸收量与周围材料相比的不同而实现检测的。
所以,颜色的识别要严格与照射在目标上的光谱成分相对应。
在单色光源中,绿光LED(565mm)和红光LED(660mm)各有所长。
绿光在很宽的颜色范围内比红光源灵敏度高。
红光LED对有限的颜色组合有响应,但它的检测距离比绿光LED远。
通常红光源传感器的检测距离是绿光源传感器的6~8倍。
电气特性:红色:VCC;黑色:GND;白色:OUT(输出和电源之间需要加一个上拉电阻)工作电压:5VDC工作电流:10-15mA驱动电流:100mA感应距离:3-10CMSensing range: 3-10cmSensing object: Translucency, opaqueSupply voltage: DC5VOutput operation: Normally open(O)Output: DC three-wire system(NPN)机械特性:颜色:橙黄色直径:18mm长度:45mm引线长度:40cmDiameter: 18mm, Length: 45mmAppearance: Threaded cylindricalMaterial: Plastic应用案例:广告卷帘灯箱膜切机、包装机等机器人、智能车黑白线检测等等。
感应垃圾桶,是相对普通垃圾桶而言的,简而言之,就是盖子可以通过感应器来开和关,不用手动和脚踩。
自动感应垃圾桶由电路芯片控制,由红外线检测装置和机械电子驱动系统组成。
只要有物体接近感应区范围内,桶盖便会自动开启,物体或手离开感应区数秒后桶盖会自动关闭,不需要外接电源,靠电池供电,使用电耗低。
感应垃圾桶电机是一种应用在智能感应垃圾桶上的传动电机,具有减速、传动功能,主要传动结构由驱动电机、齿轮箱组装而成,驱动电机可采用直流有刷电机、直流无刷电机、步进电机、空心杯电机作为驱动电机,齿轮箱采用行星齿轮箱、蜗轮蜗杆齿轮箱、定制齿轮箱作为减速器,输出功率在50W以下,电压在24V以内,直径规格在38mm以内,通常采用定制技术参数服务。
感应垃圾桶电机参数:
产品名称:16MM减速齿轮箱
产品分类:塑胶行星齿轮箱
外径:16mm
材质:塑料
旋转方向:cw&ccw
齿轮箱回程差:≤3°(可定制)
轴承:烧结轴承;滚动轴承
轴向窜动:≤0.1mm(烧结轴承);≤0.1mm(滚动轴承)
输出轴径向负载:≤10N(烧结轴承);≤20N(滚动轴承)
输入速度:≤15000rpm
工作温度:-20 (85)
定制参数、规格范围:
尺寸规格系列:3.4mm、4mm、6mm、8mm、10mm、12mm、16mm、18mm、20mm、22mm、24mm、28mm、32mm、38mm;
材质系列:塑胶行星齿轮箱、金属行星齿轮箱
输出力矩范围:1gf-cm至50kg-cm;
减速比范围:5-1500;
输出转速范围:5-2000rpm;
定制开发案例:
项目名称:自动感应垃圾桶电机齿轮箱
产品说明:垃圾桶翻盖齿轮箱为特定客户开发设计,只作为垃圾桶翻盖齿轮箱的方案展示。
解决方案:翻盖垃圾桶齿轮箱的传动模块,可解决不锈钢材质盖板需要解决翻盖的力矩及产品的噪音,通过对齿轮齿形的优化和齿轮材料的选择有限的控制了产品的噪音及增大了产品的力矩,满足了客户的要求。
生产厂家
深圳市兆威机电股份有限公司成立于2001年,是一家研发、生产精密传动系统及汽车精密注塑零组件的制造型企业,为客户提供传动方案设计,零件的生产与组装的定制化服务。