三维重建过程
- 格式:pptx
- 大小:259.57 KB
- 文档页数:18
医学图像的三维重建与可视化医学图像的三维重建与可视化是目前医学领域中的研究热点之一。
通过将医学图像转化为三维模型,医生和研究人员可以更好地观察和分析病灶,从而更准确地进行诊断和治疗,提高患者的治疗效果和生活质量。
本文将从三维重建技术和可视化技术两个方面介绍医学图像的三维重建与可视化。
三维重建技术三维重建技术是将多幅医学图像处理后,生成一个三维模型的过程。
常用的医学图像包括X光片、CT、MRI等。
三维重建技术是一项非常技术含量高的工作,需要专业的软件和设备支持,一般需要数学、物理等多个领域的知识的综合运用。
三维重建的过程主要有两步:首先是图像预处理,此步骤对图像进行去噪、增强和分割等操作,以提高三维重建的精度;然后是生成三维模型,此过程需要通过算法和数学模型来将二维图像转化为三维模型。
常用的三维重建方法包括Marching Cubes算法和Voxel Coloring算法。
其中Marching Cubes算法是一种基于灰度值的重建方法,适合于处理CT和MRI图像;而Voxel Coloring算法则是一种基于颜色的重建方法,适合处理表面模型。
可视化技术可视化技术是将三维重建的模型以可视化的方式呈现出来,让医生和研究人员可以更直观、更全面地了解病灶的情况。
常用的可视化技术包括虚拟现实技术、动态模拟技术和实时互动技术等。
虚拟现实技术是将三维重建的模型放入虚拟现实环境中展示,模拟真实环境的同时提供完整的三维信息。
这种技术通常需要大型的设备和高显卡性能的计算机。
虚拟现实技术可以让医生和研究人员在模拟环境下进行手术模拟、观察器官结构等。
动态模拟技术是通过对三维模型进行动态分析,模拟病变的进程和变化,有助于预测治疗后的效果。
例如,在肿瘤治疗中,医生可以通过动态模拟技术来预测肿瘤的发展趋势,从而制定更为科学的治疗方案。
实时互动技术是将三维模型呈现在普通计算机上,并通过交互方式来实现对三维模型的控制。
这种技术可以让医生和研究人员在计算机上方便地进行多角度观察和交互操作,提高工作效率和准确性。
三维重建的原理及应用三维重建是指通过相机或激光扫描仪等设备获取到的二维图像或点云数据,通过一系列的算法和方法,将其转化为三维模型的过程。
三维重建技术有着广泛的应用领域,包括计算机视觉领域、工业设计、虚拟现实、医学影像处理等。
三维重建的原理主要包括图像处理、相机标定、点云处理和模型构建几个方面。
首先,图像处理是三维重建的基础,其中包括图像去噪、边缘检测、特征提取等步骤。
图像去噪可以去除图像中的噪声,边缘检测则可以提取出物体的边界信息,特征提取则可以获取到物体的特征点信息。
其次,相机标定是确定相机内外参数的过程,以获取到相机对物体的观察角度和距离等信息。
相机内参数包括相机的焦距、主点位置等,而相机外参数包括相机在世界坐标系下的位置和朝向等。
然后,点云处理是将点云数据从二维图像或激光扫描结果中提取出来,并进行滤波、配准等处理。
滤波可以去除点云数据中的噪声,配准则可以将不同视角下的点云数据融合起来。
最后,模型构建是将处理后的点云数据或图像数据转化为三维模型的过程。
根据点云数据的密度和分布,可以使用网格模型或体素模型等方式进行重建。
网格模型是由一系列三角面片组成的,可以通过点云数据的表面重建得到。
而体素模型则是将点云数据划分为一系列小立方体,可以获得更加精确的三维数据。
三维重建技术有着广泛的应用领域。
在计算机视觉领域,三维重建可以用于物体识别、场景重建等任务。
通过三维重建,可以从多个角度获取到物体的视觉信息,用于物体的识别和跟踪。
同时,可以通过多个视角的照片或点云数据重建出整个场景的三维模型,用于虚拟现实、增强现实等应用。
在工业设计中,三维重建可以用于产品的设计与制造。
借助三维重建技术,可以将物理产品转化为三维模型,进行模拟和优化。
通过对模型进行修改和调整,可以降低产品的设计成本和开发周期。
在医学影像处理中,三维重建可以用于医学图像的处理与分析。
通过将多张医学影像的二维切片数据重建成三维模型,医生可以更加直观地进行病变检测和手术规划。
使用全息激光雷达进行三维重建的步骤激光雷达是一种非接触式测量技术,通过激光发射器将脉冲光束投射到检测目标上,然后接收反射回来的光信号,并根据接收到的信号来获取目标的距离、方向和强度等信息。
全息激光雷达则是在传统激光雷达的基础上引入了全息技术,能够实现对目标的三维重建。
本文将介绍使用全息激光雷达进行三维重建的步骤。
第一步,选取适当的激光雷达设备。
全息激光雷达的选择对于三维重建的成果具有重要的影响。
一般来说,全息激光雷达的激光功率、测距范围、角度分辨率和数据采集速度等参数都是需要考虑的因素。
选取合适的设备可以提高数据采集的效果和重建的精度。
第二步,确定扫描区域。
在进行三维重建之前,需要确定待测目标所处的扫描区域。
对于较大范围的目标,可以通过多次扫描不同位置来获取更多的数据。
此外,也可以根据实际需求对目标进行分割,分别进行扫描和重建。
第三步,进行数据采集。
将激光雷达设备放置在合适的位置,按照设定的参数开始进行数据采集。
激光雷达将以高频率发射激光脉冲,并记录反射回来的光信号。
通过旋转或移动激光雷达,能够获取目标在不同角度和位置上的数据。
数据采集的质量和数量对于后续的三维重建至关重要。
第四步,数据处理与滤波。
得到的原始数据可能存在噪声和离群点,需要进行处理和滤波。
数据处理的方法有很多,例如基于统计的滤波方法、基于形状的滤波方法等。
通过适当的滤波处理,可以去除噪声和离群点,提高三维重建的精度。
第五步,点云生成。
根据采集到的激光雷达数据,可以生成点云模型。
点云模型是由大量离散的点组成的三维模型,每个点都包含了目标表面的坐标和其他信息。
点云生成可以通过将采集到的激光数据进行处理和拼接得到。
生成的点云模型反映了目标物体的形状和结构,为后续的三维重建提供了基础。
第六步,三维重建。
基于生成的点云模型,可以进行三维重建。
三维重建的方法主要有两种:表面重建和体素重建。
表面重建是指根据点云中的坐标信息,通过插值和拟合等算法重建出物体的表面。
医学影像中的三维重建算法使用教程在医学影像领域,三维重建算法的使用对于理解和诊断疾病具有重要意义。
三维重建技术可以将二维医学影像转化为三维模型,从而提供更全面、准确的信息。
本篇文章将为您介绍医学影像中的三维重建算法使用教程,旨在帮助您了解如何使用这些技术来提高医学诊断的准确性和可视化效果。
首先,我们将介绍常用的三维重建算法。
医学影像中常用的三维重建算法有体素基于体绘制(Volume Rendering)、曲面提取(Surface Extraction)和体细节增强(Volume Detail Enhancement)等。
体素基于体绘制可以通过对体数据进行体绘制来呈现三维结构,曲面提取则通过提取体数据的外轮廓来生成三维模型,体细节增强则用于突出体数据中的细节信息。
选择适合您需求的算法是使用三维重建技术的第一步。
其次,我们将讨论三维重建算法的使用步骤。
使用三维重建算法的第一步是准备数据。
通常,医学影像数据以DICOM格式存储,您需要将其导入到相应的软件中。
接下来,选择适合您需求的算法,并选择合适的参数进行调整。
这些参数可能包括光线传输函数、表面提取的阈值等。
之后,您可以开始进行重建操作,并根据需要调整参数来优化结果。
最后,保存生成的三维模型或将其导出到其他软件中进一步处理或分析。
在使用三维重建算法时,还需注意一些技巧和注意事项。
首先,了解医学影像学的基本原理和解剖知识对于理解和解释三维重建结果至关重要。
其次,合理选择算法和参数对于得到满意的结果也很重要。
不同的疾病和结构可能需要不同的算法和参数来最佳显示。
此外,对于大型数据集的处理,您可能需要使用高性能计算机或分布式计算技术来加速处理过程和提高效率。
最后,三维重建技术还可以与其他医学图像处理技术相结合,如分割、配准等,以提供更全面、准确的信息。
除了基本的使用教程,了解三维重建算法的发展趋势和未来应用也是非常有帮助的。
随着计算机性能的提升和图形处理技术的发展,三维重建算法将变得更加高效和精确。
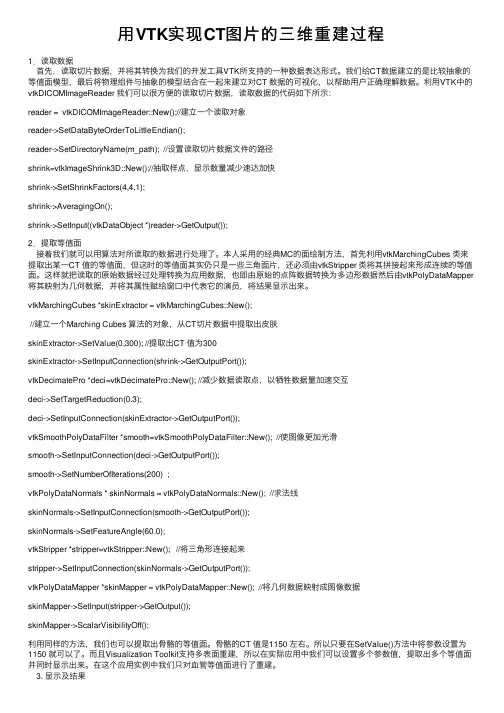
⽤VTK实现CT图⽚的三维重建过程1.读取数据⾸先,读取切⽚数据,并将其转换为我们的开发⼯具VTK所⽀持的⼀种数据表达形式。
我们给CT数据建⽴的是⽐较抽象的等值⾯模型,最后将物理组件与抽象的模型结合在⼀起来建⽴对CT 数据的可视化,以帮助⽤户正确理解数据。
利⽤VTK中的vtkDICOMImageReader 我们可以很⽅便的读取切⽚数据,读取数据的代码如下所⽰:reader = vtkDICOMImageReader::New();//建⽴⼀个读取对象reader->SetDataByteOrderToLittleEndian();reader->SetDirectoryName(m_path); //设置读取切⽚数据⽂件的路径shrink=vtkImageShrink3D::New();//抽取样点,显⽰数量减少速达加快shrink->SetShrinkFactors(4,4,1);shrink->AveragingOn();shrink->SetInput((vtkDataObject *)reader->GetOutput());2.提取等值⾯接着我们就可以⽤算法对所读取的数据进⾏处理了。
本⼈采⽤的经典MC的⾯绘制⽅法,⾸先利⽤vtkMarchingCubes 类来提取出某⼀CT 值的等值⾯,但这时的等值⾯其实仍只是⼀些三⾓⾯⽚,还必须由vtkStripper 类将其拼接起来形成连续的等值⾯。
这样就把读取的原始数据经过处理转换为应⽤数据,也即由原始的点阵数据转换为多边形数据然后由vtkPolyDataMapper 将其映射为⼏何数据,并将其属性赋给窗⼝中代表它的演员,将结果显⽰出来。
vtkMarchingCubes *skinExtractor = vtkMarchingCubes::New();//建⽴⼀个Marching Cubes 算法的对象,从CT切⽚数据中提取出⽪肤skinExtractor->SetValue(0,300); //提取出CT 值为300skinExtractor->SetInputConnection(shrink->GetOutputPort());vtkDecimatePro *deci=vtkDecimatePro::New(); //减少数据读取点,以牺牲数据量加速交互deci->SetTargetReduction(0.3);deci->SetInputConnection(skinExtractor->GetOutputPort());vtkSmoothPolyDataFilter *smooth=vtkSmoothPolyDataFilter::New(); //使图像更加光滑smooth->SetInputConnection(deci->GetOutputPort());smooth->SetNumberOfIterations(200) ;vtkPolyDataNormals * skinNormals = vtkPolyDataNormals::New(); //求法线skinNormals->SetInputConnection(smooth->GetOutputPort());skinNormals->SetFeatureAngle(60.0);vtkStripper *stripper=vtkStripper::New(); //将三⾓形连接起来stripper->SetInputConnection(skinNormals->GetOutputPort());vtkPolyDataMapper *skinMapper = vtkPolyDataMapper::New(); //将⼏何数据映射成图像数据skinMapper->SetInput(stripper->GetOutput());skinMapper->ScalarVisibilityOff();利⽤同样的⽅法,我们也可以提取出⾻骼的等值⾯。
双目视觉的目标三维重建matlab
双目视觉的目标三维重建是一个复杂的过程,它涉及到许多步骤,包括相机标定、立体匹配、深度估计和三维重建。
以下是一个简化的双目视觉的目标三维重建的Matlab实现步骤:
1. 相机标定:首先,我们需要知道相机的内部参数(例如焦距和主点坐标)和外部参数(例如旋转矩阵和平移向量)。
这些参数通常通过标定过程获得。
在Matlab中,可以使用`calibrateCamera`函数进行相机标定。
2. 立体匹配:立体匹配是确定左右两幅图像中对应像素点的过程。
这可以通过使用诸如SGBM(Semi-Global Block Matching)等算法来完成。
在Matlab中,可以使用`stereoMatch`函数进行立体匹配。
3. 深度估计:一旦我们有了立体匹配的结果,就可以估计像素点的深度。
深度通常由视差和相机参数计算得出。
在Matlab中,可以使用
`depthFromDisparity`函数根据立体匹配结果计算深度。
4. 三维重建:最后,我们可以使用深度信息将像素点转换到三维空间中,从而得到目标的三维模型。
这通常涉及到一些几何变换和插值操作。
在Matlab中,可以使用`projective2DCoordinates`函数将像素坐标转换为三维空间中的坐标。
以上步骤只是一个基本的流程,实际应用中可能需要进行更复杂的处理,例如处理遮挡、噪声、光照变化等问题。
注意:以上步骤可能需要根据实际项目需求进行调整和优化,并且需要具备一定的计算机视觉和Matlab编程基础才能理解和实现。
三维重建的原理及其应用1. 介绍在计算机视觉和图像处理领域,三维重建是指通过多个二维图像或者点云数据,将物体或场景恢复成三维模型的过程。
三维重建技术可以广泛应用于虚拟现实、医学影像、工业设计以及文化遗产保护等领域。
本文将介绍三维重建的原理和一些常见的应用。
2. 原理三维重建的原理可以分为以下几个步骤:2.1 图像获取三维重建的第一步是获取多个二维图像。
这些图像可以通过相机、扫描仪或者激光雷达等设备获得。
为了获得更好的重建结果,通常需要从不同角度拍摄物体或场景。
2.2 特征提取与匹配在图像获取后,需要对图像进行处理,提取图像中的特征点。
常见的特征点包括角点、边缘点、斑点等。
通过对不同图像的特征点进行匹配,可以确定它们在三维空间中的对应关系。
2.3 三维重建算法基于特征点的匹配关系,可以使用不同的三维重建算法来恢复物体或场景的三维模型。
常见的三维重建算法包括立体视觉、结构光和激光雷达等。
2.4 点云生成与三维模型重建在三维重建算法的基础上,可以生成三维点云数据。
点云是一组在三维空间中离散分布的点,每个点都有其在三维空间中的位置坐标。
通过对点云数据进行处理,可以生成物体或场景的三维模型。
3. 应用三维重建技术在许多领域都有广泛的应用,下面将介绍一些常见的应用。
3.1 虚拟现实三维重建可以提供真实的三维场景,为虚拟现实技术提供基础。
通过三维重建,可以创建逼真的虚拟环境,让用户可以沉浸其中,获得更加身临其境的体验。
3.2 医学影像在医学影像领域,三维重建可以用于生成人体器官的三维模型,如头部、颅骨、血管等。
这些三维模型可以帮助医生进行手术规划、病情分析和教学演示。
3.3 工业设计三维重建可以用于工业设计中的产品建模。
通过将真实物体进行三维重建,可以为设计师提供真实的物体模型,以便于进行设计和改进。
此外,对于零件缺陷检测和质量控制也有广泛应用。
3.4 文化遗产保护三维重建可以用于文化遗产的数字保护。
通过对古建筑、艺术品等进行三维重建,可以记录其精细的结构和细节,并提供基于虚拟现实的展示方式,保护文化遗产不受时间和环境的破坏。
计算机视觉中的结构光三维重建技术,是一种基于光影变换的三维重建方法。
与传统的3D重建技术相比,结构光三维重建技术不仅可以重建高精度、高分辨率的三维模型,还可以快速地获取物体的形状、质感和颜色等属性信息,因此被广泛应用于机器人、计算机游戏、全息投影等领域。
一、结构光三维重建技术的基本原理结构光三维重建技术是一种基于特殊光源与物体表面的相互作用,通过记录光源与物体表面之间的光影变换来实现的。
这个过程分为三个步骤:1. 光源投射:结构光重建中光源的投射比较复杂,常用的方法有投影仪和激光扫描仪等。
投影仪通常使用投影的方式对物体表面进行照明,投映出不同的光场模式。
2. 物体反射:投射在物体表面上的光被反射,被反射的光会按照物体表面几何特征形成不同的光场模式。
3. 影像采集:通过比较物体表面反射光与未经过照射的背景光,便可以计算得出物体表面的形状、纹理和颜色等信息,从而实现三维模型的重建。
二、结构光三维重建技术的应用1. 3D扫描与模型重建:利用结构光三维重建技术可以快速地获取物体表面的几何和纹理信息,从而快速地创建高精度、高分辨率的三维模型。
2. 视觉导航与定位:通过结合机器学习和计算机视觉技术,可以将结构光三维重建技术应用于无人机、智能机器人等设备,实现室内、室外场景的自主导航和定位。
3. 虚拟现实与增强现实:结构光三维重建技术可以将现实场景转化为三维模型,从而为虚拟现实和增强现实技术提供支持。
三、结构光三维重建技术的优缺点1. 优点a. 准确性高:由于通过多次照射相同的物体表面,可以在不同条件下重复计算多次的反射光,从而得到更加准确的数据。
b. 适用范围广:不仅可以重建难以被机器视觉识别的物体,如黑色、玻璃等,还可以重建不规则、复杂的物体表面,如毛绒玩具、褶皱纹理等。
c. 处理速度快:传统的3D扫描技术需要耗费大量时间和人工进行后期处理和优化,而结构光涉及面积小,无需专业人员操作,成本低、效率高。
2. 缺点a. 精度受限:由于光线的折射、反射等因素的影响,结构光三维重建技术的精度还需要继续提高。
三维重建的原理及应用1. 介绍三维重建是利用计算机技术将现实世界中的物体或场景转化为数字化的三维模型的过程。
它可以从多个角度获取物体或场景的信息,并以此重建其几何形状和纹理。
三维重建技术被广泛应用于多个领域,如计算机图形学、计算机视觉、虚拟现实、增强现实等,为多个行业带来了巨大的价值。
2. 三维重建的原理三维重建的实现主要依赖于以下原理:2.1 多视图几何多视图几何是指从不同视角获取物体或场景的图像,并通过对图像间的几何关系进行分析,重建物体或场景的三维几何形状。
多视图几何的主要算法包括三角测量、立体匹配等。
2.2 深度传感技术深度传感技术可以获取物体或场景中像素点到相机的距离信息,从而得到物体或场景的三维深度。
常见的深度传感技术包括结构光、时间飞行、立体视觉等。
2.3 点云重建点云重建是将物体或场景转化为一组离散的三维点的过程。
通过使用各种三维数据获取技术,将物体或场景中的点云数据提取出来,并进行点云处理和重构,可以得到其三维模型。
3. 三维重建的应用三维重建技术在各个领域都有着广泛的应用,以下列举了几个常见的应用场景:3.1 计算机图形学三维重建在计算机图形学中被广泛应用于渲染、动画制作、虚拟现实等方面。
通过对物体的几何形状和纹理进行三维重建,可以生成逼真的虚拟场景,使用户可以身临其境地感受到虚拟环境。
3.2 计算机视觉在计算机视觉领域,三维重建可以用于物体识别、姿态估计等任务。
通过从不同角度获取物体的图像,并通过三维重建的方法获取物体的几何形状,可以提供更准确的物体识别和姿态估计结果。
3.3 增强现实三维重建在增强现实领域中扮演着重要的角色。
通过将真实世界中的物体或场景进行三维重建,可以将虚拟物体与现实世界进行融合,创造出更加逼真的增强现实体验。
3.4 文化遗产保护三维重建技术在文化遗产保护方面也得到了广泛的应用。
通过对古老建筑、文物等进行三维重建,可以实现对其保存和保护,使其能够得到更好的传承和展示。
基于双目立体视觉三维重建系统的制作流程
一、实验目的
本次实验主要是通过使用双目立体视觉系统来建立三维重建系统。
当我们了解了双目立体视觉系统的原理之后,可以更好的利用其进行三维重建系统的制作。
通过该实验,学生可以更深入地了解双目立体视觉系统的原理及其在建立三维重建系统中的应用。
二、实验准备
1.电脑:主机配置要求高,硬件及驱动程序均应符合实验要求,具备良好的网络连接能力;
2.双目立体视觉相机:两台具有相同性能的高分辨率RGB相机,可以同步采集图像;
3. 软件:基于Matlab的双目立体视觉处理软件,用于处理相机捕获的图像;
4.激光雷达:专门配备距离测量仪,可以精确测量距离;
5.标定用器材:提供标定用器材,如激光雷达、GPS、重力仪等。
三、实验过程
1、准备过程:
(1)准备主机,检查双目立体视觉系统的硬件及驱动程序的完整性以及良好的网络连接能力。
(2)根据要求调整双目立体视觉相机的焦距以及调整它们的焦平面位置,以便于正确获得立体视觉信息。
(3)安装立体视觉处理软件,以进行图像处理及深度估计。
(4)为双目立体视觉系统设置标定单元。
tof三维重建流程3D reconstruction is the process of creating a 3D model of an object from a set of 2D images. It involves using computer vision and image processing techniques to analyze and extract information from the images to reconstruct the 3D geometry of the object.3D重建是从一组2D图像中创建物体的3D模型的过程。
它涉及使用计算机视觉和图像处理技术来分析并从图像中提取信息,以重建物体的3D几何结构。
The process of 3D reconstruction typically involves several steps, including image acquisition, feature extraction, matching, and 3D model generation. First, the 2D images of the object are captured using a camera or other imaging device. These images are then analyzed to extract features such as edges, corners, and texture information. Next, the features from different images are matched to find corresponding points in the 3D space. Finally, a 3D model of the object is generated using the matched feature points.3D重建的过程通常包括几个步骤,包括图像采集、特征提取、匹配和3D 模型生成。
三维重建知识总结嘿,朋友!今天咱们来聊聊三维重建这神奇的事儿。
你知道吗,三维重建就像是给世界重新塑造了一个立体的模样。
它可不是什么简单的小把戏,而是一门高深的学问。
比如说,你看到一个古老的建筑,想把它的每一个细节都完美地记录下来,这时候三维重建就派上用场啦。
它能把那建筑的每一块砖头、每一个雕花,甚至每一处岁月的痕迹都清晰地展现出来。
那三维重建到底是怎么做到的呢?这就像是搭积木一样,一块一块地拼凑起来。
首先得有大量的数据采集,就好像是收集各种各样的积木块。
这数据可以是通过激光扫描得到的,也可以是通过拍照获取的。
想象一下,拿着相机对着一个物体,从各个角度一顿猛拍,这就是在为三维重建做准备呢!采集完数据,接下来就是处理和分析啦。
这就像是把收集来的积木块分类整理,找出哪些是有用的,哪些是多余的。
这可需要一双“火眼金睛”,要不然很容易就被那些混乱的数据搞得晕头转向。
处理完数据,就到了建模的关键步骤。
这就好比是真正开始搭建积木了,要把那些零散的数据组合成一个完整的、立体的模型。
这个过程可不简单,需要有耐心和技巧。
三维重建在很多领域都大显身手呢!在医学领域,医生可以通过三维重建更清楚地看到人体内部的结构,这可比看那些平面的片子直观多啦!就像给医生开了一双能透视的“超级眼睛”,能更精准地诊断病情。
在游戏和电影制作中,三维重建能打造出超级逼真的场景和角色。
让你感觉就像是真的走进了那个虚拟的世界,难道这不神奇吗?在考古领域,三维重建能让那些古老的文物重新“活”起来,让我们能更深入地了解过去的历史和文化。
不过,三维重建也不是一帆风顺的。
有时候数据不准确,就像是积木块有残缺,那建出来的模型可就走样啦。
还有啊,处理大量的数据需要强大的计算能力,这就像是让一辆小摩托去拉一大车货物,累得够呛。
但尽管有这些困难,三维重建的前景还是一片光明的。
随着技术的不断进步,它会越来越厉害,给我们的生活带来更多的惊喜和便利。
总之,三维重建就像是一个神奇的魔法,能让平面的世界变得立体,能让隐藏的细节展现在我们眼前。
colmap三维重建原理
Colmap是一个广泛用于三维重建的软件库和工具集。
它的工作原理主
要是通过相机捕获环境的图像,然后使用机器学习算法和图像处理技
术来估计场景的几何信息。
以下是Colmap三维重建原理的主要步骤:1. 相机标定:使用Colmap的标定板进行标定,得到相机的内部和外
部参数,如焦距、畸变等。
2. 相机同步:Colmap支持多相机同步扫描,能够确保所有相机在同一时间对同一场景拍照。
3. 图像匹配:Colmap使用特征检测算法(如SIFT,SURF等)从每张
图像中提取关键点,并使用匹配算法找到这些关键点在其它图像中的
对应点,从而得到场景的初步点云。
4. 模型优化:Colmap使用机器学习算法(如随机森林)对初始的点云数据进行优化,以消除误报和噪声。
5. 纹理映射:在得到高质量的点云数据后,Colmap可以自动为重建模型贴图,生成精细的3D模型。
6. 分析与应用:最后,用户可以对重建的3D模型进行分析,如进行
可视化、测量、VR/AR应用等。
以上就是Colmap三维重建的基本原理。
通过这一系列的过程,Colmap
能够帮助用户获取高质量的3D模型,广泛应用于虚拟现实、数字城市、自动驾驶等领域。
VTK三维重建方法总结VTK(Visualization Toolkit)是一个用于可视化和图形处理的开源工具包,它提供了丰富的三维重建方法。
以下是对VTK中常用的三维重建方法的总结。
1.体素重建:体素重建是一种常用的三维重建方法,它通过将空间划分为小立方体单元(体素),根据一组参考点或曲面来确定每个体素的类别。
常用的体素重建算法包括贝叶斯体素、最近邻方法和基于形状约束的体素方法。
2.点云重建:点云是由大量离散的三维点组成的数据集,点云重建就是从点云数据中恢复出表面的几何形状。
VTK中提供了多种点云重建方法,如泊松表面重建、有向距离函数重建和法线重建。
3.曲面重建:曲面重建是将离散的点云数据转换为表面几何形状的过程。
VTK中常用的曲面重建方法包括Delaunay三角化、移动最小二乘曲面和基于真实感模型的曲面重建。
4.网格重建:网格重建是将表面几何形状转换为光滑的网格模型的过程。
VTK中常用的网格重建方法包括B-Spline曲面拟合、有限元方法和光滑滤波方法。
5.快速重建:快速重建方法主要用于大规模数据集的三维重建,能够显著提高重建效率。
VTK中常用的快速重建方法包括多层次体素分割、快速曲面重建和基于GPU的并行计算方法。
6.形状约束重建:形状约束重建是一种基于先验知识的三维重建方法,通过添加形状约束,可以更好地恢复真实的三维形状。
VTK中提供了各种形状约束重建方法,如基于最小生成树的约束、基于光滑度的约束和基于拓扑关系的约束。
总结来说,VTK提供了丰富的三维重建方法,包括体素重建、点云重建、曲面重建、网格重建、快速重建和形状约束重建。
这些方法可以根据不同的需求和数据特点来选择和组合使用,以实现高效准确的三维重建。
而VTK作为一个开源工具包,不仅可以方便地应用这些方法,还可以通过自定义算法来扩展和优化现有的重建方法。
深度相机三维重建算法
深度相机三维重建算法是利用深度相机的数据,通过算法将场景中的物体或环境重建成三维模型的过程。
下面介绍几种常用的深度相机三维重建算法:
1. 高级方法:高级方法使用多台深度相机或者附加传感器(例如,RGB相机)的数据来重建物体或场景的三维模型。
这些方法通常需要处理大量的数据,并且需要复杂的计算和算法。
高级方法可以获得较高质量的三维重建结果,但也需要更大的计算资源和时间。
2. 双目视觉方法:双目视觉方法使用两个相机捕捉同一场景的图像,通过计算两个视图之间的视差信息来估计物体的深度。
然后,通过将视差信息转化为三维点云,最终得到三维重建结果。
双目视觉方法简单且实用,可以在较短的时间内获得较好的重建效果。
3. 面部识别方法:面部识别方法是一种特殊的深度相机三维重建算法,主要用于识别和重建人脸的三维模型。
这些方法利用深度相机捕捉到的人脸数据,并通过计算和分析来重建人脸的三维模型。
面部识别方法在人脸识别、虚拟现实等领域有广泛的应用。
无论是哪种算法,深度相机的数据都是非常重要的。
因此,在使用深度相机进行三维重建时,需要仔细设置相机参数,确保数据质量和稳定性。
此外,为了获得更好的三维重建结果,还
可以使用一些图像处理和计算机视觉的技术,如光照补偿、纹理映射等。
三维重建基础知识三维重建是指通过利用图像或传感器采集到的数据,将二维信息转化为三维模型的过程。
它在计算机视觉、机器人技术、虚拟现实等领域有着广泛的应用。
在三维重建中,最基本的步骤是从二维图像或传感器数据中提取出关键的特征点。
这些特征点可以是图像中的角点、边缘、纹理等,或者是传感器采集到的点云数据中的特殊点。
通过提取这些特征点,可以得到一个对场景的初步描述。
接下来,根据这些特征点的位置关系和几何信息,可以进行三维重建。
三维重建的方法有很多种,常见的包括立体视觉、结构光、激光扫描等。
其中,立体视觉是利用多个视角的图像来进行重建的方法。
通过对这些图像进行匹配,可以得到物体表面上的特征点和纹理信息,然后通过三角测量等方法,计算出物体表面上的三维坐标。
另一种常见的方法是结构光。
结构光是通过投射一系列光条或光点到物体表面上,然后通过相机或传感器采集这些光条或光点的位置信息,从而得到物体表面的三维形状。
这种方法可以提供比立体视觉更准确的三维重建结果。
激光扫描是一种常用的三维重建方法,它通过激光器发射激光束,然后通过接收器接收被物体表面反射的激光束,根据激光束的时间差或相位差,计算出物体表面上的三维坐标。
激光扫描可以快速、精确地获取物体的三维形状,广泛应用于建筑、文物保护等领域。
除了这些基本的三维重建方法,还有一些高级的技术可以用于改进重建结果的质量。
例如,通过利用先验知识、约束条件或机器学习方法,可以提高重建结果的准确性和完整性。
另外,还可以使用多传感器融合的方法,将不同传感器采集到的数据进行融合,得到更全面的三维模型。
三维重建在很多领域都有着广泛的应用。
在计算机视觉中,三维重建可以用于场景理解、目标识别和跟踪等任务。
在机器人技术中,三维重建可以用于导航、环境建模和避障等。
在虚拟现实和增强现实中,三维重建可以用于生成逼真的虚拟场景或将虚拟物体融合到真实环境中。
三维重建是将二维信息转化为三维模型的过程,通过提取特征点和几何信息,可以实现对场景的三维重建。
使用激光扫描仪进行建筑物三维重建的步骤随着科技的不断发展,建筑行业也逐渐引入了各种高科技设备,其中激光扫描仪便是其中一种应用广泛且效果出色的技术。
激光扫描仪可以通过快速采集建筑物的大量点云数据,并生成高精度的三维模型。
本文将介绍使用激光扫描仪进行建筑物三维重建的具体步骤。
1. 设备准备在进行建筑物三维重建之前,首先需要准备好激光扫描仪以及其它必要的设备。
激光扫描仪通常包括一个扫描头、一个测距仪和一个全景相机。
此外,还需要备好电脑以及相应的扫描软件。
2. 建立测量控制点在开始扫描建筑物之前,需要在建筑物周围建立测量控制点。
这些控制点可以是人工铁钉、测量三角板或者全站仪等设备。
控制点的作用是提供精确的坐标参考,以保证后续扫描数据的准确性。
3. 进行扫描扫描建筑物的过程中,激光扫描仪通过发射高频的激光束,然后接收激光束反射回来的信号,从而计算出物体的距离和位置。
在扫描时,需要将扫描仪移动到合适的位置,并使用三脚架或其他支架进行稳定。
扫描仪通常会自动旋转和倾斜,以获取建筑物的全方位数据。
4. 数据处理扫描完成后,需要将获取的点云数据导入到计算机中进行处理。
扫描软件可以将点云数据转换成可编辑的三维模型。
在数据处理过程中,可能需要进行点云配准、噪声过滤和数据修复等操作,以获得最终的高精度模型。
5. 建筑物建模在数据处理完成后,可以使用建模软件对点云数据进行建模。
建模软件通常提供各种工具和功能,可以根据实际需要进行建筑物的形状、材质和细节等方面的编辑。
通过这些工具和功能,可以将点云数据转换成逼真的三维建筑模型。
6. 质量检查和修正在建筑物建模完成后,需要对模型进行质量检查,确保模型的准确性和真实性。
可以使用测量工具测量模型上的尺寸和角度,并与实际建筑物进行比对。
如果发现有任何偏差或错误,需要及时进行修正和调整,直到达到满意的效果。
7. 导出和应用在模型质量经过检查和修正后,可以将模型导出为常用的格式,如.obj、.stl或者.dwg等。