柔顺机构的分析与设计
- 格式:ppt
- 大小:1.71 MB
- 文档页数:27
一种柔顺恒力机构
(原创实用版)
目录
1.柔顺恒力机构的定义与特点
2.柔顺恒力机构的应用领域
3.柔顺恒力机构的优势与局限性
4.柔顺恒力机构的发展前景
正文
一、柔顺恒力机构的定义与特点
柔顺恒力机构,是一种具有恒定输出力矩、可调速、可控位姿的新型传动装置。
其主要特点是能够在高速运行过程中保持恒定的力矩输出,同时具备良好的运动平稳性和抗冲击能力。
柔顺恒力机构的核心技术主要体现在其结构的创新设计以及先进的控制策略上。
二、柔顺恒力机构的应用领域
柔顺恒力机构广泛应用于工业机器人、自动化生产线、精密传动等领域。
在工业机器人领域,柔顺恒力机构可以提高机器人的运动精度和运动平稳性,提高其工作效率和可靠性;在自动化生产线上,柔顺恒力机构可以实现精确的力控制,保证生产线的稳定性和产品质量;在精密传动领域,柔顺恒力机构可以提供恒定的力矩输出,确保精密设备的运行精度和稳定性。
三、柔顺恒力机构的优势与局限性
柔顺恒力机构具有以下优势:1.恒定的力矩输出,保证了运动过程中的稳定性;2.可调速、可控位姿,满足不同工况的需求;3.良好的运动平稳性和抗冲击能力,提高了设备的使用寿命和可靠性。
然而,柔顺恒力机构也存在一定的局限性:1.结构设计复杂,制造成
本较高;2.控制策略较为复杂,需要专业的技术支持;3.对于高负载、高速运行的场合,其性能有待提高。
四、柔顺恒力机构的发展前景
随着科技的进步和社会的发展,对柔顺恒力机构的需求将越来越大。
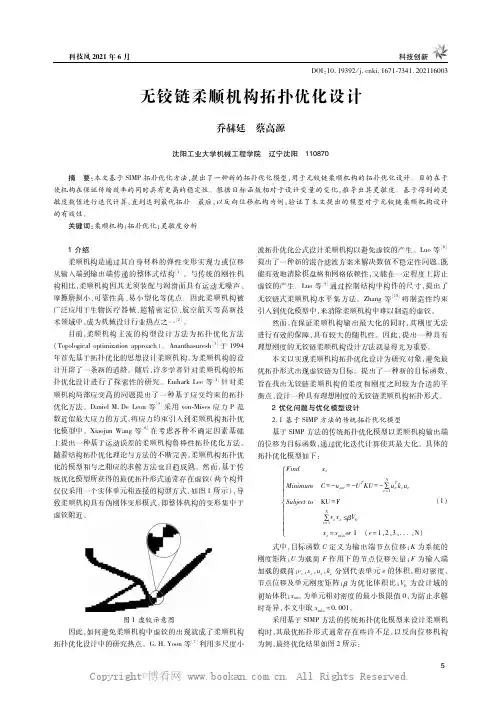
基于ANSYS的3-RRR柔顺并联机构的特性分析摘要:为了研究3-RRR柔顺并联机构的性能,分别对其刚度、运动学、温度影响分析、模态分析和谐响应分析。
采用有限元软件ANSYS 对其特性进行比较分析,分析结果可得如下结论:机构能实现3个自由度运动,并且各个输入端对输出位移的影响不同;温度对机构的输出位移有较大影响,而且温度对其输出位移的关系是线性的;从机构的前3阶振型可知,机构能实现3自由度运动;从谐响应分析结果可知,输出位移都是在接近于固有频率的地方有最大值,但不同输入端在不同频率段对各个方向位移作用不同。
论文关键词:3-RRR,柔顺并联机构,温度影响,谐响应分析,模态分析近年来,面向生物工程、医学工程以及微加工等领域的微操作机器人技术受到国内外的广泛关注[1-3],发展速度极快,已被应用于实现细胞的注射和分割,微机电产品的加工和装配和微外科手术等领域,为此,要求微操作机器人具有无摩擦、无间隙、响应快、结构紧凑、刚性好以及误差积累小等特点。
柔顺并联机构作为微操作机器人机构,可以充分发挥其自身特点:机构紧凑、重量轻、刚性好、工作空间不大、运动精度高,在三维空间的微小运动精度可以达到亚微米甚至是纳米的分辨率。
柔顺并联机构在微操作机器人领域中有着广阔应用前景[4-7]。
本文采用有限元法对3-RRR柔顺并联机构的静态和动态性能进行分析,以认识其性能特征。
2 3-RRR柔顺并联机构3-RRR平面柔顺并联机构示意图如图1所示,它是由3个RRR运动支链组成,各个运动关节为柔性铰链,可以实现动平台和方向的平动及绕轴的转动。
驱动端为压电陶瓷驱动器作用位置。
对于柔顺并联机构而言,柔性铰链的选择与设计是整个机构设计的关键。
采用正圆形柔性铰链作为机构的运动副,其结构尺寸如图2所示,mm、mm、mm。
由于柔顺机构依靠材料的弹性变形产生运动,这种变形的大小受到材料许用应力的限制,而许用应力的大小又直接与材料的疲劳强度有关,则材料需要有较长的疲劳寿命才可能正常地执行其功能。
平面柔顺四杆机构的驱动特性分析王雯静余跃庆北京工业大学,北京,100124摘要:基于伪刚体模型法,分析研究了平面柔顺机构的驱动特性问题。
以平面柔顺四杆机构为研究对象,建立其伪刚体模型。
通过对该模型的动力学分析,得到了一种柔顺机构驱动力矩计算的新方法。
算式表明柔顺机构的驱动特性与机构中柔性铰链之间存在着内在关系。
根据算例分析结果可知,通过改变柔性铰链的刚度以及各柔性铰链未变形时的初始位置能减小机构的最大驱动力矩。
关键词:柔顺机构;伪刚体模型;柔性铰链;驱动特性中图分类号:T H112 文章编号:1004—132X (2009)02—0127—04Driving Characteristics Analysis of Planar Compliant MechanismsWang WenjingYu YueqingBeijing University of Technology ,Beijing ,100124Abstract :Driving characteristics of planar compliant mechanisms were st udied based on t he p seudo -rigid -body model herein.A planar four -bar compliant mechanism was taken as an example to analyze ,t he p seudo -rigid -body model of t his mechanism was developed at first.A new met hod for calculating t he driving torque was t hen obtained based on t he dynamic analysis of compliant mechanism ,and it shows t hat t he flexible hinges have impact on t he driving characteristics of compliant mechanisms.The result s of example indicate t hat t he peak driving torque is minimized by modifying t he stiff ness and t he unst rained positions of t he flexure hinges.K ey w ords :compliant mechanism ;p seudo -rigid -body ;flexural hinge ;driving characteristics收稿日期:2008—01—04基金项目:国家自然科学基金资助项目(50875002);北京市自然科学基金资助项目(3062004);北京市属市管高等学校人才强教计划资助项目(P HR (IHLB ));北京市教委科技发展计划资助项目(KM200610005003)0 引言柔顺机构是一种利用构件自身的弹性变形来完成运动和力的传递和转换的新型机构。
柔顺机构是在驱动力作用下,通过自身柔性构件的弹性变形实现力和能量传递,并获得部分或全部运动的一类机构[1]。
相对于传统的刚性机构,柔顺机构在运动过程中没有摩擦与磨损,体积小、质量轻、加工简单、没有装配误差等优势。
因此,在精密定位、高速刀具、微夹持操纵等领域应用广泛[2-4]。
张建锐建立了柔顺储能J/S 型机构的伪刚体模型,分析了其刚度特性[5]。
马力设计了一种3自由度运动平台,实现了纳米级的定位[6]。
胡俊峰应用伪刚体模型设计了一种零刚度柔顺微动平台,该机构实现了在0.6mm~1.7mm 运动范围内输出力几乎无变化[7]。
凌明祥通过柔性梁的动刚度矩阵与矩阵位移法相结合[8],建立了柔顺机构的伪静态模型,这种模型可以实现静/动力学同时建模[8]。
本文应用柔性梁的动刚度矩阵,建立了一种单自由度柔顺铰链的伪静态模型,分析了其静力学与动力学行为。
通过优化柔顺铰链的尺寸,可以得到试用于不同工作状态的柔顺铰链模型。
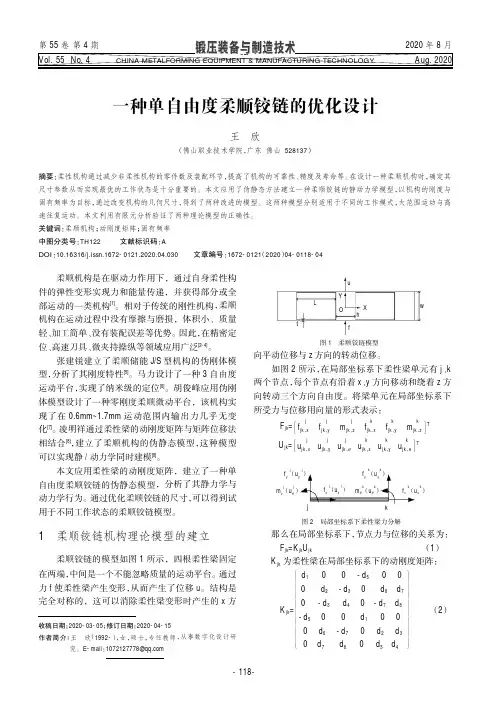
1柔顺铰链机构理论模型的建立柔顺铰链的模型如图1所示,四根柔性梁固定在两端,中间是一个不能忽略质量的运动平台。
通过力f 使柔性梁产生变形,从而产生了位移u 。
结构是完全对称的,这可以消除柔性梁变形时产生的x 方向平动位移与z 方向的转动位移。
如图2所示,在局部坐标系下柔性梁单元有j 、k 两个节点,每个节点有沿着x 、y 方向移动和绕着z 方向转动三个方向自由度。
将梁单元在局部坐标系下所受力与位移用向量的形式表示:F jk =f j jk ,xf jjk ,ym jjk ,zf kjk ,xf kjk ,ym kjk ,z[]T U jk =u jjk ,x u jjk ,y u jjk ,θu kjk ,x u kjk ,y u kjk ,θ[]T那么在局部坐标系下,节点力与位移的关系为:F jk =K jk U jk(1)K jk 为柔性梁在局部坐标系下的动刚度矩阵:K jk =d 100-d 5000d 2-d 30d 6d 70-d 3d 40-d 7d 8-d 500d 100d 6-d 70d 2d 3d 7d 8d 3d 4⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥(2)图2局部坐标系下柔性梁力分解f j y (u jy )m k θ(u kθ)f jx (u jx )f k y (u ky )f k x (u kx )m jz (u jθ)j k图1柔顺铰链模型L Xh Y utfO w收稿日期:2020-03-05;修订日期:2020-04-15作者简介:王欣(1992-),女,硕士,专任教师,从事数字化设计研究。
柔性机构控制技术研究一、引言柔性机构控制技术是现代制造工业中的核心技术之一,可以广泛应用于机械、电子、生物和医疗器械等领域。
其原理是使用柔性机构作为一种变形机构,控制变形产生的运动,可以替代传统机构中的刚性连接部件,具有结构简单、可靠性高、运动精度高等优点。
本文将从柔性机构的概念、结构及分类入手,讨论柔性机构控制技术的研究现状以及未来发展方向,旨在为柔性机构控制技术的研究和应用提供参考。
二、柔性机构的概念、结构及分类1、概念柔性机构是指由柔性材料(如弹性材料)构成的变形机构,可以根据不同的外力输入产生形变或运动。
与传统的刚性链接机构相比,柔性机构具有结构简单、可实现变形控制、低噪声、低能耗和低成本等优点,逐渐成为制造工业中的研究热点。
2、结构柔性机构由柔性杆、柔性膜、柔性板、柔性套等基本构件组成,这些构件受到外部力作用时会发生弯曲、拉伸、压缩等变形。
在柔性机构中,这些基本构件可以通过特定的拓扑关系组合在一起形成不同的机构结构,实现不同的任务。
3、分类根据柔性机构的不同形变特点,可以将其分为以下三类:(1)拉伸型柔性机构:在拉伸方向会发生明显的形变或运动,如柔性弯管、柔性卷绕展开机构等;(2)弯曲型柔性机构:在弯曲方向会发生明显的形变或运动,如柔性四杆机构、柔性扭转杆等;(3)膜状型柔性机构:由柔性薄膜构成的机构,可以在平面内实现角位移、平移运动或压缩变形,如柔性膜手术机器人、柔性膜致动器等。
三、柔性机构控制技术研究现状柔性机构控制技术的研究主要包括结构设计、变形控制方法和运动规划等方面。
近年来,国内外学者对柔性机构控制技术作了深入研究,取得了一系列重要成果。
1、结构设计在柔性机构中,结构设计是决定其性能的关键因素。
国内外学者提出了一系列柔性机构的设计方法,如优化设计、拓扑优化、材料选择等。
此外,生物学与仿生学的发展也对柔性机构结构的设计提供了新的思路与范例。
2、变形控制由于柔性机构具有高度的非线性和复杂性,在控制方面也存在一定难度,需要研究特定的控制方法,如模糊控制、神经网络控制、自适应控制等。
柔性机器人的机构设计和控制研究柔性机器人是指具有柔性结构和柔性传动机构的机械臂,它具有较高的柔性、轻巧和可变形的特点,能够在不同环境中执行精确灵活的任务。
柔性机器人的机构设计和控制是该领域的重要研究方向,本文将探讨柔性机器人的机构设计和控制方面的研究进展。
柔性机器人的机构设计是柔性机器人研究领域的关键问题之一、机构设计的目标是实现柔性臂的精确运动和优化力传递。
柔性机器人的机构设计方法主要包括柔性关节机构设计和柔性链条设计。
柔性关节机构设计是指设计柔性关节以实现机械臂的自由度和运动范围。
柔性关节可以采用弯曲或扭转等柔性材料,如弯曲杆、扭转杆或软体材料。
柔性关节的设计需要考虑材料的柔性和强度,以及与其他关节的协同运动。
柔性链条设计是指设计柔性的连接杆件以实现机械臂的连续曲线运动。
柔性链条可以采用连杆组件和柔性衔接件,通过特定的结构设计实现连杆的柔性运动。
机构设计的关键问题是如何设计合适的结构和材料,以实现柔性臂的精确运动和优化力传递。
柔性机器人的控制是柔性机器人研究领域的另一个重要问题。
由于柔性机器人具有较高的柔性和可变性,其控制方法不同于传统刚性机器人的控制方法。
柔性机器人的控制有两个主要方面:运动控制和力控制。
运动控制是指控制柔性机器人执行精确的位置和姿态变化。
传统的PID控制方法往往不适用于柔性机器人的运动控制,因为柔性臂具有较高的柔性和非线性。
因此,柔性机器人的运动控制方法需要考虑柔性臂的动力学特性和非线性建模方法。
力控制是指控制柔性机器人的力传递和接触力。
柔性机器人的力控制方法需要考虑柔性臂的力学特性和力传递的准确性。
目前,常用的柔性机器人控制方法包括模型预测控制、自适应控制和神经网络控制等。
综上所述,柔性机器人的机构设计和控制研究是该领域的重要研究方向。
机构设计的目标是实现柔性臂的精确运动和优化力传递,柔性机器人的机构设计方法包括柔性关节机构设计和柔性链条设计。
柔性机器人的控制方法需要考虑柔性臂的动力学特性和非线性建模方法,柔性机器人的控制方法包括运动控制和力控制。
柔性机器人的机构设计和控制研究柔性机器人是一种具有柔性、可变形、柔软的外形、易于操作和移动的机器人。
与传统的刚性机器人相比,它能够适应不同的工作环境和不同的任务要求。
因此,柔性机器人正在越来越广泛地应用于各种工业机器人、医疗机器人、救援机器人等领域。
本文将重点介绍柔性机器人的机构设计和控制研究。
一、柔性机器人的机构设计柔性机器人的机构设计是实现其柔性、可变形的关键。
目前,主要的柔性机器人机构设计包括软体机器人和有刚骨的柔性机器人两种。
1.软体机器人软体机器人是一种全身都是软体、可任意变形的机器人。
它与自然生物的柔软体形态相似,具有较好的柔韧性和柔性。
软体机器人的机构主要包括柔性传动机构、柔性传感机构和柔性操纵机构。
其中,柔性传动机构采用软质材料来传递机械力和能量,可以被弯曲和拉伸来实现各种运动;柔性传感机构则是采用柔性传感器来实现对外界环境的感知和反应;柔性操纵机构则是采用柔软杆件或软质机构来实现机器人的操纵。
软体机器人与刚性机器人相比,缺点是其控制较为复杂,动力学分析困难,并且在高速和高精度运动方面存在一定的限制。
2.有刚骨的柔性机器人有刚骨的柔性机器人是一种在机器人体内加入刚骨杆件来增强其刚度和稳定性的机器人。
这种机器人利用柔性杆件来实现多自由度运动,同时又在柔性杆管内嵌入了刚性杆件来弥补柔性管的缺陷,达到了柔韧性与刚度兼备的效果。
这种机器人的设计方法有三种:增量式、增量式基础上的模块化设计和全模块化。
其中,增量式设计需要先确定好机器人的主体结构,然后逐步增加和优化部件;增量式基础上的模块化设计则是在增量式设计的基础上,将机器人整体分为若干个模块,每个模块都是一个相对独立的机构;全模块化则是将机器人的每个部件都设计为一个模块,每个模块都可以与其他模块自由组合。
这种机器人的优点是稳定性好、运动精度高、运动自由度多、速度快,但相应的缺点是控制复杂,且需要集成先进的传感、控制和算法技术。
二、柔性机器人的控制研究控制是柔性机器人实现精确运动和目标完成的关键。
第!期2018年2月组合机床与自动化加工技术Modular Machine Tool & Automatic Manufacturing TechnitjueNo. 2Feb. 2018文章编号:1001 -2265(2018)02 -0021 -05D01:10.13462/j. cnki. mmtamt. 2018.02. 0063-RPC 分布柔度式柔顺机构结构设计孙慧!,张荣兴2(1.武汉工程大学邮电与信息工程学院,武汉430073;2.江西理工大学机电工程学院,江西赣州341000)摘要:针对传统柔性并联定位机构定位精度低,无法满足高精度定位要求的问题,提出分布柔度式柔 顺机构。
基于传统并联机构为设计原型,采用拓扑优化理论对空间定位机构进行拓扑优化设计,以 得到空间分布柔度式柔顺机构,首先,以3-R P C 传统并联机构为研究对象,建立微运动矢量映射关 系。
然后,建立3-R P C 分布柔度式柔顺机构的材料插值模型,运用曲线拟合方法对拓扑后的构型轮 廓进行拟合修正,并建立其拟合修正后的三维模型。
最后,通过HyperWorks 有限元软件对机构进行 静力学分析,并对3-R P C 分布柔度式柔顺机构实体模型进行试验研究。
结果表明:与同构型的柔性 并联机构相比,空间分布柔度式柔顺机构具有相同的微动特性,定位精度高,误差在允许范围内,进 而验证了空间分布柔度式柔顺机构的拓扑优化设计方法的有效性,为空间分布柔度式柔顺机构优化 设计提供了新思路。
关键词:分布柔度式柔顺机构;拓扑优化;微运动矢量映射;静力学分析 中图分类号:TH 113;TG 659 文献标识码:AStructural Design for the 3-RPCDistribution Flexible Type CompliantMechanismSUNHui1,ZHANGRong -xing2(1. College of Post and Telecommunication ,Wuhan Institute of Technology ,Wuhan 430073,China ;2. School of Mechanical and Electrical Engineering , Jiangxi University of Science and Technology ,341000,China )Abstract : Aiming at tlie problem that traditional flexible parallel positioning medianismhas low accuracy and cant meet the requirements of high precision ,the distribution flexible type compliant mechanism is pro posed . In order to get tlie spatial distxil)ution flexible type compliant mechanism ,based type of paallel medianism ,topology optimization desig^n was carried out by using topology optimization the ory . F i t l y ,based on the 3-RPCtraditional parallel mechanism ,the differential continuous vector mapping relationship between the distribution flexible type compliant mechanism and the traditional parallel mecha nism was established . Secondly ,the topology optimizationsolid material interpolation model of 3-RPC distri bution flexible type compliant medianism was establislied ,based on the curve fitting metliod ,the configuration profile was f itted and the 3D model was established . Finally ,the static simulation analysis and comparison were presented based on finite element softw ae ,and thenthe experimental study of the distribution flexible type compliant m echanism model is carried out . The results show that the distribution flexible type compliant mechanism and the traditional flexible parallel mechanism have the same movement characteristics ,the positioning accuracy is high ,and the error is within the allowable range ,verify fectiveness of the proposed method , which provides a new way of thinking for the optimum design of spatial distribution flexible type compliant mechanism .Key words : distribution flexible typecompliant mechanism ; topology optimization ; micro-motion vector mapping ; static analysis泛应用于制造业、建筑业、国防工业、医学等尖端领域。
一种柔顺恒力机构摘要:一、引言二、柔顺恒力机构的定义和特点三、柔顺恒力机构的工作原理四、柔顺恒力机构的应用领域五、柔顺恒力机构的发展前景六、总结正文:一、引言柔顺恒力机构是一种新型的机械设备,它具有独特的性能和广泛的应用。
本文将对其进行详细介绍,包括定义、特点、工作原理、应用领域和发展前景。
二、柔顺恒力机构的定义和特点柔顺恒力机构是一种能够在一定范围内承受恒定力的机构,其主要特点是具有柔顺性能,即在外力作用下能够发生形变,但又能自动恢复原状。
这种特性使得柔顺恒力机构具有很高的可靠性和稳定性。
三、柔顺恒力机构的工作原理柔顺恒力机构的工作原理主要基于其内部的柔顺元件。
当外力作用于柔顺恒力机构时,柔顺元件会发生形变,从而产生反作用力,使得机构能够承受恒定的力。
同时,柔顺元件在去除外力后能够自动恢复原状,使得机构能够保持恒定的力。
四、柔顺恒力机构的应用领域柔顺恒力机构广泛应用于各种领域,如航空航天、汽车制造、建筑施工等。
其中,在航空航天领域,柔顺恒力机构主要用于飞行器的姿态控制和推进系统;在汽车制造领域,柔顺恒力机构主要用于汽车的悬挂系统和制动系统;在建筑施工领域,柔顺恒力机构主要用于建筑物的支撑和稳定系统。
五、柔顺恒力机构的发展前景随着科技的发展,柔顺恒力机构的应用领域将会越来越广泛。
在未来,柔顺恒力机构将会进一步优化,以满足各种复杂环境下的应用需求。
同时,柔顺恒力机构的研究和开发也将成为机械工程领域的重要发展方向。
六、总结柔顺恒力机构是一种具有独特性能和广泛应用的新型机械设备。
其内部柔顺元件的特性使得机构具有高可靠性和稳定性。
柔性机械结构的设计与优化柔性机械结构是一种在机器人技术领域中广泛应用的设计概念。
与传统的刚性机械结构相比,柔性机械结构具有更高的适应性和灵活性,能够适应复杂的环境和任务需求。
在此文章中,我们将探讨柔性机械结构的设计与优化,以及其在工程领域中的应用。
首先,柔性机械结构的设计需要考虑材料特性和结构设计的匹配。
柔性结构的材料应具有足够的韧性和弹性,以确保结构在受力时能够保持其形状和弹性回复性。
常用的柔性材料包括聚合物、弹性体和纤维素材料,它们的选择取决于具体的应用需求。
同时,结构设计要考虑到材料特性,以确保结构能够承受所需的力和变形。
其次,柔性机械结构的优化需要综合考虑多个因素。
其中一个重要的因素是结构的刚度和柔软性之间的平衡。
柔性机械结构需要具有足够的刚度,以保证在受力时结构不会过度变形或失去控制,同时又要具备足够的柔软性,以适应各种工作条件和环境。
这需要在设计中考虑结构的材料选择、几何形状和连接方式等因素,以实现最佳的平衡。
另一个关键因素是结构的精确控制和运动范围。
柔性机械结构需要能够实现精确的控制和运动,以完成各种复杂的任务。
这需要在结构设计中考虑传感器和执行器的位置和布置,以实现对结构的准确控制和运动。
同时,结构的运动范围也需要考虑到实际应用需求,以避免结构在工作过程中受到限制或产生不必要的变形。
此外,柔性机械结构的可靠性和寿命也是设计优化的重要考虑因素。
柔性机械结构在长期使用过程中可能会受到疲劳、磨损和变形等因素的影响,从而影响其性能和寿命。
因此,设计过程中需要考虑结构的耐用性和可靠性,选择合适的材料和工艺,并进行结构的寿命测试和可靠性分析。
随着柔性机械结构在工程领域中的广泛应用,其应用领域也越来越广泛。
柔性机械结构可以应用于医疗机器人、空间探测器、救援机器人等领域,在这些领域中能够适应不同的任务需求并具备较高的灵活性和适应性。
例如,柔性机械结构可以用于进行手术操作,通过精确的控制和柔软的结构,可以实现对患者的精确切割和缝合,减少手术创伤和提高手术成功率。
基于水平集方法的柔顺机构拓扑优化设计研究的开题报告一、研究背景和意义柔顺机构是一种非常重要的机械结构,在工业、医疗、机器人等领域有着广泛的应用。
然而,由于设计难度大、成本高等原因,柔顺机构的设计和优化研究一直是机械工程领域的热门研究方向之一。
针对柔顺机构的优化,传统的拓扑优化方法(例如,单纯形法、遗传算法等)存在一些局限性,如对复杂的约束条件和复杂的目标函数求解困难等。
因此,近年来,水平集方法在拓扑优化中得到了广泛的应用,其以几何变形为基础,通过合理的目标函数和约束条件进行优化设计,具有易于程序实现、效率高、可处理多目标等优点,可以有效地解决传统拓扑优化方法存在的问题。
本项目旨在基于水平集方法,对柔顺机构的拓扑优化进行研究,设计出更为优秀的柔顺机构结构,并实现仿真模拟,为柔顺机构的实际应用提供有力的支持。
二、研究内容和方法(一)研究内容1. 柔顺机构结构建模与仿真。
2. 基于水平集方法对柔顺机构的拓扑优化进行研究。
3. 针对不同约束条件和目标函数,设计相应的代价函数。
4. 对柔顺机构进行多目标拓扑优化。
5. 利用优化算法对代价函数进行求解。
6. 仿真分析并验证柔顺机构的优化设计效果。
(二)研究方法1. 利用Creo软件对柔顺机构进行3D建模。
2. 使用ANSYS软件进行有限元分析。
3. 利用MATLAB编程实现拓扑优化算法。
4. 结合MASM算法实现求解。
5. 使用结果可视化工具呈现优化结果。
三、预期成果和时间安排(一)预期成果1. 完成柔顺机构的建模和仿真分析。
2. 基于水平集方法实现柔顺机构的拓扑优化。
3. 验证拓扑优化方案的有效性和优越性。
4. 为柔顺机构实际应用提供改进方案和设计建议。
(二)时间安排1. 第一阶段(1-2个月):研究柔顺机构的建模和仿真。
2. 第二阶段(2-4个月):研究水平集方法并实现柔顺机构的拓扑优化。
3. 第三阶段(4-5个月):验证拓扑优化方案的有效性和优越性。
4. 第四阶段(5-6个月):总结成果并撰写论文。