SLIC超像素分割算法和目前超像素算法的比较代码实现
- 格式:doc
- 大小:31.50 KB
- 文档页数:7

opencv 超像素分割每个像素块同一颜色超像素分割是一种用于图像处理和计算机视觉领域的技术,它将图像划分为更小且具有相似特征的区域,这些区域被称为超像素。
每个超像素块具有相同的颜色或纹理等特性,可以用来进行图像分割、目标检测和图像分析等任务。
超像素分割算法的目标是将图像划分为若干个紧凑且连通的超像素块,使得每个超像素内的像素具有一致的属性。
相比传统的像素级分割方法,超像素分割可以减少图像中的冗余信息,并提高后续图像处理算法的效率和准确性。
常用的超像素分割算法有SLIC(Simple Linear Iterative Clustering)、SEEDS(Superpixels Extracted via Energy-Driven Sampling)和LSC(Linear Spectral Clustering)等。
这些算法的原理大致相同,首先根据图像的颜色或者纹理信息将图像划分为超像素种子,然后通过迭代合并或分离的方式不断优化超像素块的边界,直到满足停止准则。
在SLIC算法中,图像被划分为一个个紧凑的正方形块,每个块内像素的颜色和空间位置信息被用来度量相似性。
算法首先根据指定的超像素数目将图像划分为若干个初始网格,然后通过迭代优化每个超像素的中心位置和边界。
这样得到的超像素块具有较好的紧凑性和连通性。
SEEDS算法采用自底向上的策略进行超像素分割,首先将图像划分为若干个子区域,然后通过能量最小化的方式不断合并或分离子区域,直到达到预定的超像素数目。
SEEDS算法在计算效率和分割质量上都取得了较好的平衡。
LSC算法将超像素分割问题转化为了一个基于图论的最小切割问题,通过图论的方法对图像进行分割。
该算法在处理大规模图像时具有较好的效果,但对参数的敏感性较高。
超像素分割在图像处理领域有着广泛的应用。
首先,超像素分割可以用来进行图像分割,将图像中的前景和背景分离出来,有助于目标检测、图像识别和图像分析等任务的实现。

基于改进的SLIC超像素分割算法
许晓东;张雷;焦小雪;廉桂城
【期刊名称】《电子制作》
【年(卷),期】2023(31)2
【摘要】针对原始的简单线性迭代聚类(simple linear iterative clustering,SLIC)超像素分割算法,在运行前需要根据经验来预设分割的超像素块数,这可能导致出现过分割或欠分割的问题。
本文提出了一种改进的SLIC超像素分割算法,利用全局HSV颜色空间的非均匀量化来间接地表示待分割图像的复杂度,并进一步用其一维向量对应直方图的均值来表示预分割超像素的块数,从而达到自适应设置超像素块数的目的。
随后为了获得更加完整地分割图像目标轮廓信息,本文还提出了利用图像的梯度信息对分割结果做进一步处理。
最终结果显示,相较于原始的SLIC超像素分割算法,本文所提的改进SLIC算法能够在保障分割质量的前提下,大幅减少分割图像中的过割行为并保留目标图像的边界区域。
【总页数】4页(P58-60)
【作者】许晓东;张雷;焦小雪;廉桂城
【作者单位】河北工程大学数理科学与工程学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于SLIC超像素分割的图分割算法
2.基于SLIC超像素分割的SAR图像海陆分割算法
3.融合FPGA技术的改进SLIC超像素分割算法
4.改进的SLIC超像素图像分割与合并算法
5.改进的SLIC超像素图像分割与合并算法
因版权原因,仅展示原文概要,查看原文内容请购买。

一种基于SLIC的超像素快速色彩传递算法超像素(superpixel)是一个连续、小且相对均匀的图像区域,能够有效的减少图像的数据量,简化图像分割和分析。
超像素技术在图像处理、目标识别、图像压缩等领域有着广泛的应用。
在超像素的生成过程中,SLIC(Simple Linear Iterative Clustering)是一种常用的算法,它结合了K均值聚类和距离约束,能够快速而高效地生成超像素。
传统的超像素生成算法通常是基于像素之间的空间距离或颜色相似度进行聚类,但是这些方法通常会导致超像素的边界不够清晰、不够紧凑。
为了解决这个问题,本文提出了一种基于SLIC的超像素快速色彩传递算法,通过整合SLIC超像素生成算法和色彩传递技术,实现了高效且准确地传递颜色信息,进一步提升了超像素的质量。
首先,我们利用SLIC算法生成初始的超像素。
SLIC算法通过将图像划分为均匀网格,然后在每个网格中选择代表性像素点,利用K均值聚类的方式将图像像素点归类。
这种方法能够减少计算量,同时保留图像的细节信息,生成比较紧凑的超像素。
然后,在生成的超像素基础上,我们引入色彩传递的思想,将相邻超像素之间的颜色信息传递给彼此。
色彩传递是一种基于图像的颜色一致性原则,将源图像中的颜色信息传递到目标图像中。
在超像素颜色传递的过程中,我们首先计算每个超像素的平均颜色,并将其作为超像素的代表颜色。
然后,对于每个超像素,计算其相邻超像素的颜色差异度,并根据差异度进行颜色传递。
传递的过程中,我们考虑了超像素的空间位置、色彩相似度等因素,以保证传递的颜色信息更加准确和稳定。
为了进一步加速算法的执行速度,我们还采用了一些优化措施。
例如,引入了迭代合并的策略,将邻近的超像素进行合并,减少了超像素的数量,提高了算法的效率。
同时,我们还采用了并行计算的方法,利用多核处理器对算法进行加速,使得算法能够在较短的时间内生成高质量的超像素。
实验结果表明,我们提出的基于SLIC的超像素快速色彩传递算法在准确性和效率上都取得了较好的表现。

超像素分割 python超像素分割(Superpixel Segmentation)是一种图像分割的方法,旨在将图像分割为若干均匀、紧凑且具有语义的区域。
超像素分割是计算机视觉和图像处理领域的热门研究方向,常用于目标识别、图像分割、物体跟踪等应用。
超像素分割的基本思想是将图像划分为若干个具有一定连续性的区域,并且使得区域内的像素具有相似的颜色、纹理、边缘等特征。
相比于传统的像素级分割方法,超像素分割能够减少计算复杂度,并且更好地保留了图像中的结构信息。
下面介绍几种常用的超像素分割方法。
1. SLIC超像素分割算法SLIC(Simple Linear Iterative Clustering)是一种流行的超像素分割算法。
它将图像划分为一系列紧凑的超像素,其中每个超像素由相似的像素组成。
SLIC算法首先将图像均匀地划分为固定数量的网格,然后在每个网格内寻找代表性的像素,最后通过优化迭代过程来调整超像素的形状和位置。
2. SEEDS超像素分割算法SEEDS(Superpixels Extracted via Energy-Driven Sampling)是一种基于分水岭算法的超像素分割方法。
它通过在图像中随机选择一些种子像素,然后通过种子像素之间的相似性来迭代地合并像素,最终得到超像素分割结果。
3. LSC超像素分割算法LSC(Linear Spectral Clustering)是一种基于谱聚类的超像素分割算法。
它通过将图像像素表示为高维特征空间中的点,并利用谱聚类算法将像素分成若干个紧凑的子集。
LSC算法具有较好的鲁棒性和可扩展性,并且能够处理不规则形状的超像素。
4. ERS超像素分割算法ERS(Efficient Graph-Based Image Segmentation)是一种基于图论的超像素分割算法。
它通过建立一个图,其中图的节点表示图像的像素,边表示像素之间的关系。
ERS算法通过最小生成树算法和最大子图算法来合并相似的像素,从而得到紧凑且连通的超像素。

图像超像素(superpixels)分割算法——简单线性迭代聚类(SLIC)原理 SILC(simple linear iterative clustering)是⼀种图像分割算法。
默认情况下,该算法的唯⼀参数是k,约等于超像素尺⼨的期望数量。
对于CIELAB彩⾊空间的图像,在相隔S像素上采样得到初始聚类中⼼。
为了产⽣⼤致相同尺⼨的超像素,格点的距离是S=√N/k。
中⼼需要被移到3x3领域内的最低梯度处,这样做是为了避免超像素中⼼在边缘和噪声点上。
接下来为每⼀个像素i设置最近的聚类中⼼,该聚类中⼼的搜索区域要覆盖该像素的位置。
这是本算法加速的关键,因为通过限制搜索区域的⼤⼩减⼩了距离计算的数量,并且相对于传统的k-means聚类算法有显著的速度优势,因为后者的每个像素都必须和所有的聚类中⼼进⾏⽐较。
⼀个超像素的预期空间范围是约为SxS的区域,这⾥对于相似像素的搜索是在超像素中⼼的2Sx2S区域完成。
⼀旦每个像素被关联到最近的聚类中⼼后,就通过求聚类中⼼所有像素的均值来执⾏聚类中⼼的更新。
使⽤L2范数计算前⼀个聚类中⼼和当前聚类中⼼的残差。
assignment和update步骤被重复迭代直到误差收敛,但是我们发现对于⼤多数图像10次迭代就够了。
算法步骤1)通过在常规⽹格步长S处采样像素来初始化聚类中⼼2)在3x3的领域内移动聚类中⼼到最低的梯度位置3)为每⼀个像素i设置标签l(i)4)为每⼀个像素设置距离d(i)=∞5)对于每⼀个聚类中⼼遍历2Sx2S区域内的每⼀个像素点,计算距离决定是否更新像素的标签和距离6)更新聚类中⼼7)重复步骤5)6)直到收敛Processing math: 100%。
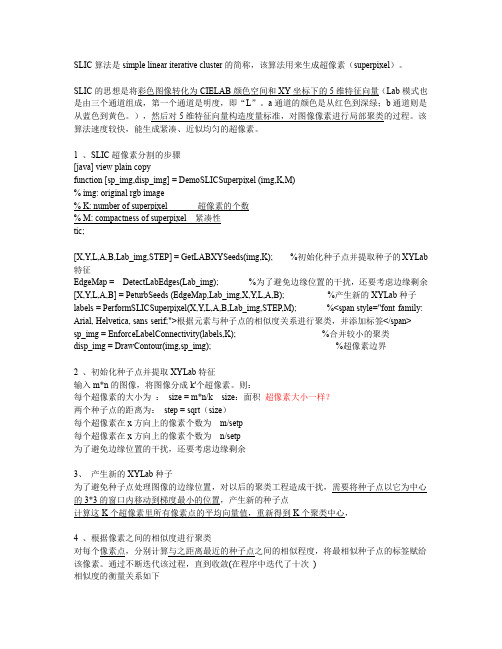
SLIC算法是simple linear iterative cluster的简称,该算法用来生成超像素(superpixel)。
SLIC的思想是将彩色图像转化为CIELAB颜色空间和XY坐标下的5维特征向量(Lab模式也是由三个通道组成,第一个通道是明度,即“L”。
a通道的颜色是从红色到深绿;b通道则是从蓝色到黄色。
),然后对5维特征向量构造度量标准,对图像像素进行局部聚类的过程。
该算法速度较快,能生成紧凑、近似均匀的超像素。
1 、SLIC超像素分割的步骤[java] view plain copyfunction [sp_img,disp_img] = DemoSLICSuperpixel (img,K,M)% img: original rgb image% K: number of superpixel 超像素的个数% M: compactness of superpixel 紧凑性tic;[X,Y,L,A,B,Lab_img,STEP] = GetLABXYSeeds(img,K); %初始化种子点并提取种子的XYLab 特征EdgeMap = DetectLabEdges(Lab_img); %为了避免边缘位置的干扰,还要考虑边缘剩余[X,Y,L,A,B] = PeturbSeeds (EdgeMap,Lab_img,X,Y,L,A,B); %产生新的XYLab种子labels = PerformSLICSuperpixel(X,Y,L,A,B,Lab_img,STEP,M); %<span style="font-family: Arial, Helvetica, sans-serif;">根据元素与种子点的相似度关系进行聚类,并添加标签</span>sp_img = EnforceLabelConnectivity(labels,K); %合并较小的聚类disp_img = DrawContour(img,sp_img); %超像素边界2 、初始化种子点并提取XYLab特征输入m*n的图像,将图像分成k'个超像素。
SILC超像素分割算法详解(附Python代码)SILC算法详解⼀、原理介绍SLIC算法是simple linear iterative cluster的简称,该算法⽤来⽣成超像素(superpixel)算法步骤:已知⼀副图像⼤⼩M*N,可以从RGB空间转换为LAB空间,LAB颜⾊空间表现的颜⾊更全⾯假如预定义参数K,K为预⽣成的超像素数量,即预计将M*N⼤⼩的图像(像素数⽬即为M*N)分隔为K个超像素块,每个超像素块范围⼤⼩包含[(M*N)/K]个像素假设每个超像素区域长和宽都均匀分布的话,那么每个超像素块的长和宽均可定义为S,S=sqrt(M*N/K)遍历操作,将每个像素块的中⼼点的坐标(x,y)及其lab的值保存起来,加⼊到事先定义好的集合中每个像素块的中⼼点默认是(S/2,S/2)进⾏获取的,有可能落在噪⾳点或者像素边缘(所谓像素边缘,即指像素突变处,⽐如从⿊⾊过渡到⽩⾊的交界处),这⾥,利⽤差分⽅式进⾏梯度计算,调整中⼼点:算法中,使⽤中⼼点的8领域像素点,计算获得最⼩梯度值的像素点,并将其作为新的中⼼点,差分计算梯度的公式:Gradient(x,y)=dx(i,j) + dy(i,j);dx(i,j) = I(i+1,j) - I(i,j);dy(i,j) = I(i,j+1) - I(i,j);遍历现中⼼点的8领域像素点,将其中计算得到最⼩Gradient值的像素点作为新的中⼼点调整完中⼼点后即需要进⾏像素点的聚类操作通过聚类的⽅式迭代计算新的聚类中⼼;⾸先,需要借助K-means聚类算法,将像素点进⾏归类,通过变换的欧⽒聚距离公式进⾏,公式如下(同时参考像素值和坐标值提取相似度):通过两个参数m和S来协调两种距离的⽐例分配。
参数S即是上⾯第③步计算得出的每个像素块的长度值,⽽参数M为LAB空间的距离可能最⼤值,其可取的范围建议为[1,40]为了节省时间,只遍历每个超像素块中⼼点周边的2S*2S区域内的像素点,计算该区域内每个像素点距离哪⼀个超像素块的中⼼点最近,并将其划分到其中;完成⼀次迭代后,重新计算每个超像素块的中⼼点坐标,并重新进⾏迭⼆、代码实现1import math2from skimage import io, color3import numpy as np45class Cluster(object):67 cluster_index = 189def__init__(self, row, col, l=0, a=0, b=0):10 self.update(row, col, l, a, b)11 self.pixels = []12 self.no = self.cluster_index13 Cluster.cluster_index += 11415def update(self, row, col, l, a, b):16 self.row = row17 self.col = col18 self.l = l19 self.a = a20 self.b = b212223class SLICProcessor(object):24 @staticmethod25def open_image(path):26 rgb = io.imread(path)27 lab_arr = color.rgb2lab(rgb)28return lab_arr2930 @staticmethod31def save_lab_image(path, lab_arr):32 rgb_arr = b2rgb(lab_arr)33 io.imsave(path, rgb_arr)3435def make_cluster(self, row, col):36 row=int(row)37 col=int(col)38return Cluster(row, col,39 self.data[row][col][0],40 self.data[row][col][1],41 self.data[row][col][2])4243def__init__(self, filename, K, M):44 self.K = K45 self.M = M4647 self.data = self.open_image(filename)48 self.rows = self.data.shape[0]49 self.cols = self.data.shape[1]50 self.N = self.rows * self.cols51 self.S = int(math.sqrt(self.N / self.K))5253 self.clusters = []54 bel = {}55 self.dis = np.full((self.rows, self.cols), np.inf)5657def init_clusters(self):58 row = self.S / 259 col = self.S / 260while row < self.rows:61while col < self.cols:62 self.clusters.append(self.make_cluster(row, col))63 col+= self.S64 col = self.S / 265 row += self.S6667def get_gradient(self, row, col):68if col + 1 >= self.cols:69 col = self.cols - 270if row + 1 >= self.rows:71 row = self.rows - 27273 gradient = (self.data[row + 1][col][0] +self.data[row][col+1][0]-2*self.data[row][col][0])+ \74 (self.data[row + 1][col][1] +self.data[row][col+1][1]-2*self.data[row][col][1]) + \75 (self.data[row + 1][col][2] +self.data[row][col+1][2]-2*self.data[row][col][2])7677return gradient7879def move_clusters(self):80for cluster in self.clusters:81 cluster_gradient = self.get_gradient(cluster.row, cluster.col)82for dh in range(-1, 2):83for dw in range(-1, 2):84 _row = cluster.row + dh85 _col = cluster.col + dw86 new_gradient = self.get_gradient(_row, _col)87if new_gradient < cluster_gradient:88 cluster.update(_row, _col, self.data[_row][_col][0], self.data[_row][_col][1], self.data[_row][_col][2])89 cluster_gradient = new_gradient9091def assignment(self):92for cluster in self.clusters:93for h in range(cluster.row - 2 * self.S, cluster.row + 2 * self.S):94if h < 0 or h >= self.rows: continue95for w in range(cluster.col - 2 * self.S, cluster.col + 2 * self.S):96if w < 0 or w >= self.cols: continue97 L, A, B = self.data[h][w]98 Dc = math.sqrt(99 math.pow(L - cluster.l, 2) +100 math.pow(A - cluster.a, 2) +101 math.pow(B - cluster.b, 2))102 Ds = math.sqrt(103 math.pow(h - cluster.row, 2) +104 math.pow(w - cluster.col, 2))105 D = math.sqrt(math.pow(Dc / self.M, 2) + math.pow(Ds / self.S, 2))106if D < self.dis[h][w]:107if (h, w) not in bel:108 bel[(h, w)] = cluster109 cluster.pixels.append((h, w))110else:111 bel[(h, w)].pixels.remove((h, w))112 bel[(h, w)] = cluster113 cluster.pixels.append((h, w))114 self.dis[h][w] = D115116def update_cluster(self):117for cluster in self.clusters:118 sum_h = sum_w = number = 0119for p in cluster.pixels:120 sum_h += p[0]121 sum_w += p[1]122 number += 1123 _h =int( sum_h / number)124 _w =int( sum_w / number)125 cluster.update(_h, _w, self.data[_h][_w][0], self.data[_h][_w][1], self.data[_h][_w][2])126127def save_current_image(self, name):128 image_arr = np.copy(self.data)129for cluster in self.clusters:130for p in cluster.pixels:131 image_arr[p[0]][p[1]][0] = cluster.l132 image_arr[p[0]][p[1]][1] = cluster.a133 image_arr[p[0]][p[1]][2] = cluster.b134 image_arr[cluster.row][cluster.col][0] = 0135 image_arr[cluster.row][cluster.col][1] = 0136 image_arr[cluster.row][cluster.col][2] = 0137 self.save_lab_image(name, image_arr)138139def iterates(self):140 self.init_clusters()141 self.move_clusters()142#考虑到效率和效果,折中选择迭代10次143for i in range(10):144 self.assignment()145 self.update_cluster()146 self.save_current_image("output.jpg")147148149if__name__ == '__main__':150 p = SLICProcessor('beauty.jpg', 200, 40)151 p.iterates()三、运⾏效果截图(原图)(效果图)代码参考了https:///laixintao/slic-python-implementation,且做了改进作为⼀枚技术⼩⽩,写这篇笔记的时候参考了很多博客论⽂,在这⾥表⽰感谢,转载请注明出处......。
SLIC超像素分割算法和目前超像素算法的比较Radhakrishna Achanta, IEEE专业会员,Appu Shaji, Kevin Smith, IEEE专业会员,Aurelien Lucchi,Pascal Fua, IEEE会士,and Sabine Susstrunk,IEEE高级会员摘要近年来计算机视觉应用已经越来越依赖于超像素处理,但它并不总是很清楚什么是一个好的超像素的算法。
为了了解目前算法的优点和缺点,我们验证比较了5种目前使用的超像素算法与图像边缘吻合的能力,速度,内存使用率和它们对于分割效果的影响。
我们引入了一种基于应用k-means 聚类算法的简单线性迭代聚类(SLIC)的新的超像素算法以有效生成超像素。
尽管它很简单,SLIC对于边界的吻合度与之前的算法相比不分上下甚至更好。
同时,它速度更快,占用内存更小,分割性能更优,并直接扩展了超体素生成。
索引词汇超像素,分割,聚类,k-means1 简介超像素算法组像素在感知上有意义的原子区域中可以取代像素网格的刚性结构(图1)。
他们捕捉图像冗余,提供了一种便捷的计算图像特征,并大幅降低后续图像处理任务的复杂度的原始方法。
他们已经成为很多计算机视觉算法的关键构建模块,比如在PASCAL VOC挑战赛中得分最高的多类对象分割[ 9 ],[ 29 ],[ 11 ],深度估计[ 30 ],分割[ 16 ],人体模型估计[ 22 ],以及目标定位[ 9 ]。
有许多方法来生成超像素,每一个都有自己的优点和缺点,可能更适合特定的应用程序。
例如,如果图像边界吻合度是非常重要的,那么基于图的方法会是一个理想的选择。
然而,如果是用超像素来构建一幅图像,那么如[ 23 ]这种产生一个更为常规的晶格的方法可能是更好的选择。
虽然很难界定什么是对所有应用都理想的方法,我们相信以下性能通常是可取的:1. 超像素应该有好的图像边界吻合度。
2. 当用于减少计算的复杂性时,作为一个预处理步骤,超像素应该可被快速计算,占据较小的内存,和简单的使用。
基于改进SLIC算法的超像素图像分割及参数优化
王静;余顺园
【期刊名称】《自动化技术与应用》
【年(卷),期】2024(43)5
【摘要】为了提高超像素图像分割效率,根据颜色参数设计得到SLIC图像分割算法。
研究结果表明:应确保K值达到尽量小的状态下,设置更高精度的边界分割效果,从而确保精度提升的基础上尽量减少计算量。
逐渐提高超像素数后,UE呈现持续降低的趋势,最终达到饱和状态;在初期处于较小超像素数量的情况下,ASA发生了快速增长,此时分割精度也获得了快速提升;BR表现为较平稳的增长趋势,形成了稳定的BR参数。
优化SLIC算法以自动方式设置的K值为323,实现了算法计算过程的明显简化。
所设计的优化SLIC方法可针对各类图像分别设置超像素数量,不必进行多次尝试来选择超像素,使运行时间大幅缩短。
【总页数】4页(P67-69)
【作者】王静;余顺园
【作者单位】安康学院电子与信息工程学院
【正文语种】中文
【中图分类】TP391
【相关文献】
1.改进的SLIC超像素图像分割与合并算法
2.改进的SLIC超像素图像分割与合并算法
3.基于SLIC超像素粒化的粗糙熵图像分割算法
4.基于改进的SLIC超像素分割算法
5.基于区域再分割的改进型SLIC超像素生成算法
因版权原因,仅展示原文概要,查看原文内容请购买。
超像素分割算法(SLIC算法)
SLIC算法的核心思想是将图像空间和颜色空间相结合,通过将像素点聚类为超像素,实现图像的分割。
算法的流程如下:
1.初始化:选择超像素数量K,并进行初始位置的选择。
一种常用的初始化方法是均匀地将图像分成K个网格,并选取每个网格的中心点作为初始位置。
2. 迭代优化:对每个超像素中心点,使用k-means算法将其周围的像素分类到该超像素。
这里的距离度量不仅包括欧氏距离,还考虑了颜色相似性和空间距离的权重。
同时,还计算了每个像素点到最近超像素中心点的距离,用于后续的超像素合并操作。
3.超像素合并:根据像素点到最近超像素中心点的距离和相邻超像素之间的相似性,进行超像素的合并操作。
这样可以将尺寸较小的超像素合并为更大的超像素,使得图像分割更加连贯。
4.迭代优化:重复步骤2和步骤3,直到达到预设的迭代次数或者收敛为止。
SLIC算法有以下特点:
1. 快速有效:SLIC算法通过使用k-means算法进行迭代聚类,使得算法具有较高的效率。
同时,由于使用了颜色和空间信息,也能够获得更好的分割效果。
2.参数少:SLIC算法只需要设置一个参数,即超像素数量K,此外,还可以根据需要设置聚类的迭代次数。
3.保持图像边界:由于考虑了颜色相似性和空间距离的权重,在进行超像素合并操作时能够较好地保持图像的边界。
4.可扩展性:SLIC算法可以很容易地扩展到多通道的图像,同时也可以用于视频超像素分割。
总的来说,SLIC算法是一种快速有效的超像素分割算法,具有较好的分割效果。
通过合适的初始化和迭代次数,可以在保持图像细节的同时实现图像的快速分割。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。