第一章 自动控制系统概述
- 格式:ppt
- 大小:1.85 MB
- 文档页数:41


自动化期中学习总结报告经过一段时间的学习,已经学习了以下内容,现归纳,整理如下: 第一章 自动控制系统概述 1.自动控制理解和认识控制:为实现某种目的对对象(设备)进行操作。
是指为了改善性能或达到特定目的,通过对信息信息的采集和加工而是施加到对象的作用。
手动控制:人工控制 自动控制:用仪表自动控制,特点是无人化。
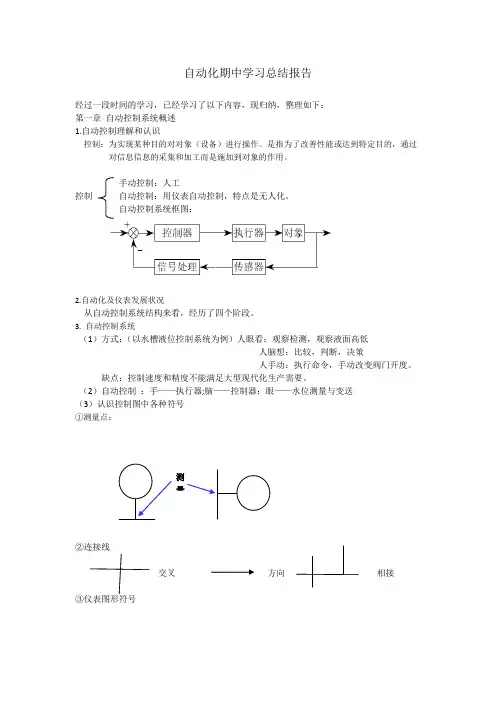
自动控制系统框图:2.自动化及仪表发展状况从自动控制系统结构来看,经历了四个阶段。
3. 自动控制系统(1)方式:(以水槽液位控制系统为例)人眼看:观察检测,观察液面高低 人脑想:比较,判断,决策人手动:执行命令,手动改变阀门开度。
缺点:控制速度和精度不能满足大型现代化生产需要。
(2)自动控制 :手——执行器;脑——控制器;眼——水位测量与变送 (3)认识控制图中各种符号①测量点:②连接线交叉 方向 相接③仪表图形符号测量④字母代号第一位字母表示被测变量T ——温度 P ——压力 L ——物位 F ——流量 A ——成分 后续字母代表仪表功能T ——变送 C ——控制 I ——指示 R ——记录 A ——报警 E ——检测 Y ——运算、信号转换 详见P255附录1例:LT ——物位变送 LC ——物位控制⑤仪表位号:字母代号组合+阿拉伯数字编号PIC 上:压力指示控制207 下:第一位数字表示段号,后续数字表示仪表位号。
207表示工段号为2,⑷自控系统组成:过程(对象):需要控制的生产设备或生产过程。
检测元件及变送器:测量参数并转化成统一信号。
自动控制器:根据偏差送出控制信号。
指示仪表,就地安装,工,仪表序号执行器:改变阀门开度。
框图:P5被控过程(对象):工艺参数需要控制的生产过程设备或机器等。
如水槽,发酵罐。
被控变量:被控对象中要求保持设定值的工艺参数。
如汽包水位、发酵温度。
操纵变量:受控制器操纵,用以克服扰动的影响使被控变量保持设定值的物料量或能量。
如锅炉给水量和发酵罐冷却水量。

自动控制原理与系统,第三版第一章自动控制系统概述填空1.所谓自动控制,就是在没有人直接参与的情况下,利用控制装置,对生产过程等进行自动调节与控制,使之按照预定的方案达到要求的指标。
(1.1)2.18世纪瓦特(Watt)利用小球离心调速器使蒸气机转速保持恒定。
(1.1)3.若系统的输出量不被引回来对系统的控制部分产生影响,这样的系统称为开环控制系统。
(1.2)4.若系统的输出量通过反馈环节返回来作用于控制部分,这样的系统称为闭环控制系统。
(1.2)5.反馈信号与输入信号的极性相同则称为正反馈。
(1.3)6.恒值控制系统的特点是输入量是恒量,并且要求系统的输出量相应地保持恒定。
(1.4)7.随动系统的特点是输入量是变化着的,并且要求系统的输出量能跟随输入量的变化而作出相应的变化。
(1.4)8.自动控制系统的性能通常是指系统的稳定性、稳态性能和动态性能。
(1.5)9.控制系统的动态指标通常用最大超调量、调整时间和振荡次数来衡量。
(1.5)10.经典控制理论是建立在传递函数概念基础之上的。
(1.6)11.现代控制理论是建立在状态变量概念基础之上的。
(1.6)单选1.在自动控制系统的性能指标中,最重要的性能是() (1.5)动态性能稳定性稳态性能快速性双选1.若系统的输出量通过反馈环节返回来作用于控制部分,这样的系统称为() (1.2)开环控制系统闭环控制系统前馈控制系统反馈控制系统复合控制系统2.开环控制系统的适用场合是() (1.2)系统的扰动量影响不大系统的扰动量大且无法估计控制精度达不到预期要求系统未设反馈环节系统的扰动量可以预计并能进行补偿3.闭环控制系统的适用场合是() (1.2)系统的扰动量影响不大控制精度达不到预期要求系统未设反馈环节系统的扰动量大系统的扰动量可以预计并能进行补偿4.自动控制系统按输入量变化的规律可分为恒值控制系统和() (1.4)连续控制系统伺服系统过程控制系统离散控制系统时变系统5.自动控制系统按系统的输出量和输入量间的关系可分为() (1.4)连续控制系统离散控制系统线性系统非线性系统定常系统6.恒值控制系统是最常见的一类自动控制系统,例如() (1.4)火炮控制系统自动调速系统雷达导引系统刀架跟随系统水位控制系统简答1. 简述开环控制和闭环控制的优缺点及适用场合。
第一章自动控制系统概述1、组成自动控制系统的基本元件或装置有哪些?各环节的作用?控制系统是由控制对象和控制装置组成,控制装置包括:(1) 给定环节给出与期望的输出相对应的系统输入量。
(2) 测量变送环节用来检测被控量的实际值,测量变送环节一般也称为反馈环节。
(3) 比较环节其作用是把测量元件检测到的实际输出值与给定环节给出的输入值进行比较,求出它们之间的偏差。
(4) 放大变换环节将比较微弱的偏差信号加以放大,以足够的功率来推动执行机构或被控对象。
(5) 执行环节直接推动被控对象,使其被控量发生变化。
常见的执行元件有阀门,伺服电动机等。
2、什么是被控对象、被控量、控制量、给定量、干扰量?举例说明。
被控对象指需要给以控制的机器、设备或生产过程。
被控量指被控对象中要求保持给定值、要按给定规律变化的物理量,被控量又称输出量、输出信号。
控制量也称操纵量,是一种由控制器改变的量值或状态,它将影响被控量的值。
给定值是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
除给定值之外,凡能引起被控量变化的因素,都是干扰,干扰又称扰动。
比如一个水箱液位控制系统,其控制对象为水箱,被控量为水箱的水位,给定量是水箱的期望水位。
3、自动控制系统的控制方式有哪些?自动控制系统的控制方式有开环控制、闭环控制与复合控制。
4、什么是闭环控制、复合控制?与开环控制有什么不同?若系统的输出量不返送到系统的输入端(只有输入到输出的前向通道),则称这类系统为开环控制系统。
在控制系统中,控制装置对被控对象所施加的控制作用,若能取自被控量的反馈信息(有输出到输入的反馈通道),即根据实际输出来修正控制作用,实现对被控对象进行控制的任务,这种控制原理被称为反馈控制原理。
复合控制是闭环控制和开环控制相结合的一种方式,既有前馈通道,又有反馈通道。
5、自动控制系统的分类(按元件特性分、按输入信号的变化规律、按系统传输信号的性质)?按系统输入信号的时间特性进行分类,可分为恒值控制系统和随动系统。
第一章自动控制系统概述1、组成自动控制系统的基本元件或装置有哪些各环节的作用控制系统是由控制对象和控制装置组成,控制装置包括:(1) 给定环节给出与期望的输出相对应的系统输入量。
(2) 测量变送环节用来检测被控量的实际值,测量变送环节一般也称为反馈环节。
(3) 比较环节其作用是把测量元件检测到的实际输出值与给定环节给出的输入值进行比较,求出它们之间的偏差。
(4) 放大变换环节将比较微弱的偏差信号加以放大,以足够的功率来推动执行机构或被控对象。
(5) 执行环节直接推动被控对象,使其被控量发生变化。
常见的执行元件有阀门,伺服电动机等。
2、什么是被控对象、被控量、控制量、给定量、干扰量举例说明。
被控对象指需要给以控制的机器、设备或生产过程。
被控量指被控对象中要求保持给定值、要按给定规律变化的物理量,被控量又称输出量、输出信号。
控制量也称操纵量,是一种由控制器改变的量值或状态,它将影响被控量的值。
给定值是作用于自动控制系统的输入端并作为控制依据的物理量。
给定值又称输入信号、输入指令、参考输入。
除给定值之外,凡能引起被控量变化的因素,都是干扰,干扰又称扰动。
比如一个水箱液位控制系统,其控制对象为水箱,被控量为水箱的水位,给定量是水箱的期望水位。
3、自动控制系统的控制方式有哪些自动控制系统的控制方式有开环控制、闭环控制与复合控制。
4、什么是闭环控制、复合控制与开环控制有什么不同若系统的输出量不返送到系统的输入端(只有输入到输出的前向通道),则称这类系统为开环控制系统。
在控制系统中,控制装置对被控对象所施加的控制作用,若能取自被控量的反馈信息(有输出到输入的反馈通道),即根据实际输出来修正控制作用,实现对被控对象进行控制的任务,这种控制原理被称为反馈控制原理。
复合控制是闭环控制和开环控制相结合的一种方式,既有前馈通道,又有反馈通道。
5、自动控制系统的分类(按元件特性分、按输入信号的变化规律、按系统传输信号的性质)按系统输入信号的时间特性进行分类,可分为恒值控制系统和随动系统。
自动控制原理讲义第一章概述1.1自动控制系统基本概念1.2自动控制系统的组成和基本特点1.3自动控制的作用和意义1.4自动控制系统的发展历程第二章数学模型与传递函数2.1控制系统的模型化2.2传递函数的定义与性质2.3电气系统的传递函数2.4机械系统的传递函数2.5热系统的传递函数2.6液压系统的传递函数第三章时域分析与性能指标3.1控制系统的时域响应3.2控制系统的稳定性分析3.3闭环控制系统的稳态误差3.4控制系统的性能指标第四章线性系统的根轨迹法4.1根轨迹的定义与性质4.2根轨迹的绘制方法4.3根轨迹与系统性能的关系4.4根轨迹法的应用举例第五章频域分析与稳定性5.1频域分析的基本概念与方法5.2 Nyquist准则与稳定性判据5.3 Bode图与频率响应5.4频域法在系统设计中的应用第六章频域设计与校正6.1控制系统的校正问题6.2极点配置法与频率域设计6.3 Bode积分法与相位校正6.4全套控制器的设计与校正实例第七章系统鲁棒性与鲁棒控制7.1系统鲁棒性的定义与评估7.2H∞控制理论与方法7.3鲁棒控制的应用举例与原理第八章自适应控制8.1自适应控制的基本概念与原理8.2参数识别与模型跟踪8.3自适应控制器设计与应用例子8.4自适应控制的发展与前景第九章非线性系统与控制9.1非线性系统的基本概念与性质9.2非线性系统的稳定性分析9.3非线性系统的控制方法9.4非线性系统的应用实例第十章控制系统优化与参数优化10.1控制系统的优化问题10.2优化理论与方法10.3控制器参数优化的举例与原理第十一章模糊控制与神经网络控制11.1模糊控制的基本概念与原理11.2模糊控制系统的设计与应用例子11.3神经网络控制的基本概念与原理11.4神经网络控制系统的设计与应用例子第十二章智能控制与拓展12.1智能控制基本概念与发展12.2智能控制系统的设计与应用例子12.3控制系统的拓展与创新结语自动控制原理的讲义主要介绍了自动控制系统的基本概念、组成和基本特点,以及自动控制的作用和意义。