基于二维图形数据的三维模型重建
- 格式:doc
- 大小:14.49 KB
- 文档页数:8
三维重建综述
三维重建是利用二维图像重构出三维模型的一种技术,也称三维照相术,是运
动机器人、虚拟现实等技术的重要基础。
三维重建开发技术可以利用机器视觉技术、激光扫描技术以及计算机处理技术之间的结合来计算出单一或多个图像绘制出三维空间中对象的图形,如图像等。
机器视觉技术在三维重建中的应用非常普遍,其主要原理是基于摄像机实时拍
摄到的图像和知识信息之间的结合,根据图像的特征与物体形状之间的关系来构建三维空间模型。
激光扫描技术是三维重建中应用得比较广泛的技术之一,原理是通过精确测量
激光点来重建物体的三维模型,它的优势是能更准确的模拟出物体的实际形状,而且扫描比较快,效率高。
计算机处理技术是三维重建中的重要组成部分,一般是利用数字图像编辑技术
来构建三维模型,以软件运算和处理技术模拟出三维模型,再把这些数据通过算法来彻底处理和改善。
未来,随着技术发展,三维重建技术会朝着更为精准,更为高效的方向发展,
其在工业生产、虚拟现实、机器人研究以及医疗应用等方面的应用也会更加广泛,可以给人类带来更多的便利。
三维拉伸重建算法三维拉伸重建算法是一种通过在平面上重建三维物体的方法。
在计算机图形学和计算机视觉领域,三维拉伸重建算法被广泛应用于实现三维建模、虚拟现实、医学图像处理等多个领域。
三维拉伸重建算法的核心思想是基于二维图像的投影信息,通过计算和推导,将二维图像转化为三维物体的结构和形状。
该算法主要包括以下几个步骤:图像预处理、特征提取、三维重建和模型优化。
图像预处理是为了提高图像的质量和准确性。
常见的预处理方法包括去噪、图像增强和图像分割等。
通过这些步骤,可以有效地减少图像中的噪声、增强图像的对比度和边缘等特征,为后续的处理提供更好的输入。
特征提取是为了从二维图像中提取出与物体形状和结构相关的信息。
常见的特征包括边缘、角点、纹理等。
通过特征提取,可以将图像中的物体与背景区分开来,并获取到物体的几何形状和拓扑结构。
接下来,三维重建是将二维图像转化为三维物体的过程。
在这一步骤中,需要利用相机的内外参数、图像的投影关系和特征点的位置等信息,通过三角测量和空间插值等方法,来推导出物体在三维空间中的位置和形状。
模型优化是为了进一步提高三维重建结果的准确性和完整性。
在这一步骤中,可以利用迭代最近点算法、非线性优化等方法,对三维模型进行局部或全局的调整和优化,以使其更符合实际物体的形状和结构。
三维拉伸重建算法的应用非常广泛。
在三维建模领域,可以利用该算法实现从二维图像到三维模型的转化,为虚拟现实、游戏开发等提供基础数据。
在医学图像处理领域,可以利用该算法对医学影像进行三维重建,帮助医生进行疾病诊断和手术规划。
然而,三维拉伸重建算法也存在着一些挑战和限制。
首先,算法的准确性和效率之间存在着一定的权衡。
在实际应用中,需要根据具体需求和资源限制,选择合适的算法和参数,以达到最佳的效果。
其次,算法对图像质量和特征提取的要求较高。
如果图像质量较差或者特征提取不准确,将会对三维重建结果产生较大的影响。
三维拉伸重建算法是一种通过在平面上重建三维物体的方法。
切片式三维重构的原理三维重构是计算机视觉、图像处理和计算机图形学领域中的一个重要研究方向。
它涉及到从一系列二维图像或点云数据中重建出三维场景的几何结构和纹理信息。
其中,切片式三维重构是一种常见的方法,其原理基于对三维场景的不同切片进行分析和重建。
切片式三维重构的核心思想是将三维场景从不同视角拍摄得到的二维图像或点云数据,按照一定顺序进行切片,然后分析每个切片并根据其特征进行三维重建。
具体而言,切片式三维重构包括以下几个步骤:第一步,图像获取和预处理。
通过摄像机或激光扫描器等设备获取一系列二维图像或点云数据,并对其进行去噪、纠偏等预处理工作,以提高后续重建的准确性和稳定性。
第二步,相机标定和对齐。
对于二维图像,需要进行相机标定以确定其内外参数,然后对齐各个视角的图像,使其在同一个坐标系统下进行重建。
对于点云数据,需要进行点云对齐,以确保各个切片对应的点云在同一坐标系统下进行处理。
第三步,切片选择和分析。
在这个步骤中,根据需求选择适当数量和精度的切片,并对每个切片进行分析和处理。
具体分析方法包括特征提取、图像配准、点云配准等。
通过分析每个切片的特征和关系,可以得到场景的几何结构和纹理信息。
第四步,三维重建和表面重构。
根据切片的分析结果,可以进行三维重建和表面重构工作。
其中,三维重建可以根据切片中的特征点或处理后的点云数据,通过三角剖分、体素填充等方法,生成三维场景的几何结构。
表面重构则可以通过融合切片的纹理信息,生成真实场景的表面模型。
第五步,优化和修正。
在得到初步的三维重建结果后,可以进行优化和修正工作,以提高重建的精度和完整性。
优化方法包括图像拼接、点云融合、去除误差等。
对于表面模型,还可以进行网格重构、去噪等操作,以获得最终的三维重建结果。
切片式三维重构的原理非常灵活,适用于各种不同场景的三维重建需求。
它可以克服单一视角无法获取完整信息的局限性,有效提高重建的准确性和稳定性。
同时,切片式三维重构还可以通过调整切片的数量和精度,灵活平衡重建的效率和精度。
三维重建的若干关键技术研究三维重建的若干关键技术研究一、引言三维重建是指通过从二维图像或激光扫描数据中提取信息,恢复或创建出一个物体或场景的三维模型。
随着计算机图形学和计算机视觉技术的发展,三维重建在各个领域得到了广泛应用,如虚拟现实、工业制造、文化遗产保护等。
本文将介绍三维重建中的若干关键技术研究。
二、图像拍摄与预处理图像拍摄是三维重建的第一关键环节。
通常采用相机或摄像机拍摄一系列二维图像,然后从中提取特征点进行后续处理。
在图像拍摄过程中,需要注意照明条件、相机参数和拍摄角度等因素的控制,以保证后续处理的准确性和可靠性。
另外,根据拍摄目标的大小和复杂程度,可以选择多视角拍摄或单视角拍摄。
在拍摄完成后,还需要进行图像的预处理,包括去噪、图像增强和色彩校正等,以提高后续处理的效果。
三、特征点提取与匹配特征点提取和匹配是三维重建的核心技术之一。
通过对图像中的特征点进行提取和描述,然后在不同图像之间进行匹配,可以确定特征点在三维空间中的位置。
常用的特征点包括角点、边缘和纹理等。
在特征点提取过程中,需要考虑对尺度、旋转和光照等变化的鲁棒性。
在特征点匹配中,常用的方法包括基于特征描述子的匹配和基于几何关系的匹配。
特征点提取与匹配的准确性和鲁棒性直接影响了三维重建的精度和稳定性。
四、立体匹配与深度图生成立体匹配和深度图生成是三维重建的基础。
通过对立体图像中的像素进行匹配,可以得到视差图或深度图,从而获取物体的三维形状信息。
立体匹配的关键在于确定两幅图像中对应像素之间的匹配关系,通常通过寻找最佳匹配或计算视差值来实现。
常用的立体匹配方法包括基于区域的匹配和基于特征点的匹配。
最终,通过对视差图进行后处理,如滤波和插值,可以得到精确的深度图。
五、点云生成与重建点云生成和重建是三维重建的关键环节之一。
通过将立体匹配或深度图中的像素坐标转换为三维空间中的点坐标,可以得到点云数据。
点云数据代表了物体或场景的表面形状和空间位置。
vtk 三维重建原理vtk(Visualization Toolkit)是一个开源的软件系统,用于处理和可视化三维图形数据。
它提供了一系列的算法和工具,可以用于三维重建。
本文将介绍vtk三维重建的原理。
我们需要了解vtk三维重建的基本原理。
vtk三维重建的核心思想是利用已知的二维图像数据,通过一系列的计算和算法,重建出三维物体的几何形状和纹理信息。
具体而言,vtk三维重建的过程主要包括以下几个步骤。
第一步是数据准备。
通常情况下,vtk三维重建需要使用到一组二维图像数据,这些数据可以是来自不同角度或者不同时间的图像。
这些图像数据需要经过预处理,包括对图像进行去噪、校正和对齐等操作,以保证后续的重建过程的准确性和可靠性。
第二步是点云生成。
在vtk三维重建中,点云是一个重要的中间结果。
点云是由一组三维坐标点构成的集合,每个点对应着物体表面的一个特定位置。
通过对二维图像进行特征提取和匹配,可以计算出每个点在三维空间中的坐标。
vtk提供了多种点云生成算法,包括结构光、立体视觉和多视角立体等方法。
第三步是三维重建。
在获得点云之后,vtk可以利用这些点云数据进行三维重建。
三维重建的目标是根据点云数据恢复出物体的几何形状和纹理信息。
vtk提供了多种三维重建算法,包括体素插值、曲面重建和纹理映射等方法。
这些算法可以根据具体的需求选择使用,以获得更准确和真实的三维重建结果。
第四步是结果可视化。
vtk三维重建的最终结果需要以可视化的方式呈现出来。
vtk提供了丰富的可视化工具和技术,可以将重建结果以各种形式展示出来,包括三维模型、纹理贴图和动画等。
这些可视化技术可以帮助用户直观地理解和分析重建结果,提高对三维物体的认知和理解。
总结起来,vtk三维重建的原理是通过对二维图像进行处理和分析,生成点云数据,并利用这些点云数据进行三维重建,最终以可视化的方式展示出重建结果。
vtk提供了一系列的算法和工具,可以帮助用户实现高质量的三维重建。
三维重建的四种常用方法在计算机视觉和计算机图形学领域中,三维重建是指根据一组二维图像或其他类型的感知数据,恢复或重建出一个三维场景的过程。
三维重建在许多领域中都具有重要的应用,例如建筑设计、虚拟现实、医学影像等。
本文将介绍四种常用的三维重建方法,包括立体视觉方法、结构光法、多视图几何法和深度学习方法。
1. 立体视觉方法立体视觉方法利用两个或多个摄像机从不同的视角拍摄同一场景,并通过计算图像间的差异来推断物体的深度信息。
该方法通常包括以下步骤:•摄像机标定:确定摄像机的内外参数,以便后续的图像处理和几何计算。
•特征提取与匹配:从不同视角的图像中提取特征点,并通过匹配这些特征点来计算相机之间的相对位置。
•深度计算:根据图像间的视差信息,通过三角测量等方法计算物体的深度或距离。
立体视觉方法的优点是原理简单,计算速度快,适用于在实时系统中进行快速三维重建。
然而,该方法对摄像机的标定要求较高,对纹理丰富的场景效果较好,而对纹理缺乏或重复的场景效果较差。
2. 结构光法结构光法利用投影仪投射特殊的光纹或光条到被重建物体表面上,通过观察被投射光纹的形变来推断其三维形状。
该方法通常包括以下步骤:•投影仪标定:确定投影仪的内外参数,以便后续的光纹匹配和几何计算。
•光纹投影:将特殊的光纹或光条投射到被重建物体表面上。
•形状计算:通过观察被投射光纹的形变,推断物体的三维形状。
结构光法的优点是可以获取目标表面的细节和纹理信息,适用于对表面细节要求较高的三维重建。
然而,该方法对光照环境要求较高,并且在光纹投影和形状计算过程中容易受到干扰。
3. 多视图几何法多视图几何法利用多个摄像机从不同视角观察同一场景,并通过计算摄像机之间的几何关系来推断物体的三维结构。
该方法通常包括以下步骤:•摄像机标定:确定每个摄像机的内外参数,以便后续的图像处理和几何计算。
•特征提取与匹配:从不同视角的图像中提取特征点,并通过匹配这些特征点来计算摄像机之间的相对位置。
基于图像的三维重建技术研究一、本文概述随着科技的不断进步和计算机视觉领域的快速发展,基于图像的三维重建技术已成为当前研究的热点和前沿。
本文旨在对基于图像的三维重建技术进行深入的研究和分析,探讨其原理、方法、应用以及未来的发展趋势。
本文将介绍三维重建技术的基本概念、发展历程和应用领域,为后续研究提供背景和基础。
重点阐述基于图像的三维重建技术的核心原理和方法,包括图像采集、特征提取、相机标定、三维建模等关键步骤,以及近年来出现的深度学习、神经网络等新技术在三维重建中的应用。
本文还将对基于图像的三维重建技术在不同领域的应用进行详细介绍,如文化遗产保护、城市规划、医疗诊断、机器人导航等,以展示其广泛的应用前景和社会价值。
对基于图像的三维重建技术的发展趋势进行展望,提出未来可能的研究方向和应用领域。
通过本文的研究,旨在为相关领域的研究人员和技术人员提供全面的技术参考和启发,推动基于图像的三维重建技术的进一步发展和应用。
二、基于图像的三维重建技术原理基于图像的三维重建技术主要依赖于计算机视觉和图像处理的相关算法和理论,通过从二维图像中提取深度信息,进而恢复出物体的三维形状和结构。
这一过程涉及多个关键步骤,包括特征提取、相机标定、立体匹配和三维模型构建等。
特征提取是三维重建的基础。
通过算法识别图像中的关键点和特征,如角点、边缘等,这些特征在后续的三维重建过程中起着重要的作用。
这些特征点不仅帮助确定图像间的对应关系,也为相机标定和立体匹配提供了依据。
相机标定是确定相机内外参数的过程,包括相机的内参(如焦距、主点等)和外参(如相机的位置和方向)。
准确的相机标定对于后续的三维重建至关重要,因为它直接影响到三维点的计算精度。
接着,立体匹配是基于两幅或多幅图像,通过寻找相同特征点在不同图像中的对应关系,以获取深度信息的过程。
这一步骤依赖于特征提取的准确性和算法的效率。
立体匹配的结果直接影响到后续三维模型的精度和细节。
根据相机参数和立体匹配的结果,可以通过三角测量等方法计算出物体的三维坐标,从而构建出物体的三维模型。

旧题新作——基于MATLAB的切片三维重建三维重建是计算机图形学和医学图像处理领域的一个重要主题,它使用二维切片图像数据来重建出三维物体模型,对医学诊断、工程设计等领域具有重要意义。
本文基于MATLAB软件,以切片图像数据为输入,利用三维重建算法实现了一个简单的三维重建系统,并对其进行了详细的分析和评测。
2. 数据准备三维重建的输入通常是一组二维切片图像数据,这些数据可以是CT(computed tomography)扫描、MRI(magnetic resonance imaging)扫描等医学影像,也可以是工程设计中的数字化模型的切片数据。
在本文中,我们将使用一个开放的医学影像数据集作为示例数据,以展示三维重建系统的实现过程。
3. 切片图像预处理在进行三维重建之前,我们首先需要对输入的二维切片图像数据进行预处理。
预处理的步骤包括图像格式转换、灰度值标定、噪声去除等。
在MATLAB中,我们可以利用Image Processing Toolbox中的函数来实现这些步骤,例如imread、im2double、imfilter等。
4. 三维重建算法在图像预处理完成后,我们可以开始进行三维重建算法的实现。
三维重建的核心思想是将多个二维切片图像数据拼接起来,然后根据其空间位置关系来还原出三维物体的表面模型。
常见的三维重建算法包括体素化方法、曲面重建方法等。
在本文中,我们将以Marching Cubes算法为例,展示其在MATLAB中的实现过程。
5. 算法实现在MATLAB中实现Marching Cubes算法,需要用到一些基本的图像处理和三维可视化函数。
我们需要将预处理后的二维切片图像数据转换为三维体素数据,这可以通过MATLAB 中的voxeldata函数来实现。
然后,我们需要编写Marching Cubes算法的实现代码,以根据体素数据来还原三维物体的表面模型。
我们可以利用MATLAB中的三维可视化函数,如patch和trisurf,来将还原出的三维表面模型进行可视化展示。
多媒体技术及其应用本栏目责任编辑:唐一东3ds Max 中二维图形转三维模型的常用建模方法赵涛(洛阳师范学院,河南洛阳471000)摘要:建模是3ds Max 的基础,没有一个好的模型,其他任何好的效果都无法体现。
3ds Max 具有多种建模方法。
该文主要阐述3ds Max 二维图形转三维模型的几种常用建模方法。
关键词:在渲染中启用;在视口中启用;二维图形修改器;放样中图分类号:TP37文献标识码:A文章编号:1009-3044(2020)36-0185-02开放科学(资源服务)标识码(OSID ):3ds Max 是Autodesk 公司出品的基于PC 系统的三维动画渲染和制作软件,由于其功能强大,使其面市以来就一直受到广大用户的喜爱。
3ds Max 在模型创建、场景构建和渲染、动画、卡通等方面都能打造高品质的作品[1],这也使其在广告、影视动画、工业设计、建筑设计以及工程可视化等领域中占据领导地位。
13ds Max 建模简介制作作品的过程中,一般都遵循建模、材质、灯光、渲染这四个基本流程,其中建模是基础,没有模型,材质和灯光就是无根之木。
建模过程中,无论是简单的还是复杂的三维模型,尽管形态有很大的差别,但仔细观察就会发现,这些模型都是由基本元素加以组合而得的。
在建模时要先观察分析目标模型,若目标模型比较简单,可以直接进行建模;若是目标模型较为复杂,可以将其拆分成若干基本元素的组合,再分析每个基本元素,将其简化为二维图形,然后由细节到主体依次将二维图形转换为三维模型即可得到目标模型。
因此很多时候,我们建模的过程就是将二维图形转换为三维模型的过程,针对这一情况,本文主要介绍3ds Max 二维图形转三维模型的常用方法。
2二维转三维的常用建模方法2.1在渲染中启用和在视口中启用在视图中创建如图1所示的球形二维图形,进入【修改】命令面板,展开【渲染】卷展栏,勾选【在渲染中启用】、【在视口中启用】,设置【径向】的【厚度】,模型效果如图2所示,设置【矩形】的【长度】、【宽度】,模型效果如图3所示。
基于SolidWorks的二维工程图三维重建系统实现甘树坤;闫树双;吕雪飞;李洪涛【摘要】阐述了以二维工程图中三视图表达为基础的三维重建基本理论和相关算法,重点改进了一种轮廓搜索算法.构建的三维重建系统是以DXF文件为数据源,借助Visual C++编程语言开发了一个基于SolidWorks平台的三维重建系统.实验表明提出的算法和实现过程具有较好的可行性和有效性.【期刊名称】《吉林化工学院学报》【年(卷),期】2011(028)007【总页数】4页(P39-42)【关键词】三维重建;二维工程图;SolidWorks;轮廓提取【作者】甘树坤;闫树双;吕雪飞;李洪涛【作者单位】吉林化工学院机电工程学院,吉林吉林132022;中国石化集团第十建设公司,山东淄博255000;吉林化工学院机电工程学院,吉林吉林132022;吉林石化公司动力三厂,吉林吉林132021【正文语种】中文【中图分类】TP391.41在企业中,累存了大量的二维工程设计图纸,由于不易保存、管理,所以一般将图纸扫描成可数字化存储的图像,而通过数字图像化的工程图纸转换成矢量的图形格式,是目前CAD领域的一个研究热点[1].作为先进制造技术的核心是三维CAD 模型,代表着CAD技术的发展方向;为了更充分、有效地利用早期的设计成果,如何将二维工程图转化为三维立体模型[2]是CAD领域中研究的一个非常重要的方向.由二维工程图进行的三维模型重建工作是一项集计算机图形学、计算机视觉和计算机辅助设计技术等相互交叉的研究课题,是通过计算机自动识别并处理二维图中的几何与拓扑信息,并生成三维模型的过程.由二维图到三维形体重建过程,如图1所示.根据画法几何理论,在一个方向的投影只能确定空间点的两个坐标位置,即一个视图无法确定点的三维空间位置;而通过空间点在两个不同方向的投影虽然可以确定点的三维空间位置,但对于一些复杂的立体结构是很难表达清楚该立体的具体结构信息的.对于单个视图或两个视图的空间立体结构的表达,尚需通过其他信息,如文字、尺寸标注等形式才能表达清楚,因此,在工程图中常采用三视图或多于三视图的方式表达立体的完整结构.本文主要介绍通过三视图的表达进行的三维重建工作.在三视图表达中,如果以F、T、S来分别表示主、俯、左视图上的各点的集合,那么位于主视图中的点可表示为f(f∈F),且其可反映x坐标与z坐标的空间位置,通常表示为x(f)、z(f);则位于俯视图与左视图上的点可分别表示为x(t)、y(t)和y(s)、z(s).则由三维空间坐标系中可知,对于某点坐标值在不同视图中的具有如下关系:由三视图生成的空间点集V可表示为:二维工程图三维重建的基本出发点主要就基于以上公式来描述空间点的对应关系. 三维重建的过程中对于工程图样中信息理解的核心主要是怎样来准确地恢复在投影过程中损失的空间点的拓扑信息与几何信息.结合人识图思维方式,进行计算机的三维重建过程一般可以划分为视图预处理与分离、轮廓提取、基元识别、重建实现等几个步骤[3].在重建三维形体时,常用的方法是模型引导法实现的视图分离算法[4],通过处理输入视图的数据文件从而获取视图信息.一般采用双链表结构表示投影图的点、线数据.通过读取CAD软件形成的DXF图形文件,将三视图中的投影点及图元分别用相应的数据结构表示出来,构造点表与图元表.在图元表中就会相应地包含三视图中的所有图元信息,在点表中会包含如线段等的端点、圆心、圆弧的起、终点等数据.在进行视图分离以后,还需要建立相应的投影面坐标系,从而更清晰的描述出各视图中的点、线及图元信息特征.轮廓提取方法目前常用的有侧点法、基于回溯的参考点边界算法、基于顺时针走向搜索轮廓的方法、基于矢量积的轮廓搜索方法等典型的算法[5].本文采用一种改进的角度判别法,实现轮廓的提取和搜索.算法通过转换几何角度来计算当前搜索路径与分支路径的矢量角的函数值,利用三角函数在某区间上具有的单调性,将角度值的比较转为变换后三角函数值的比较.本改进算法避免了对角度值的直接计算,减小了计算误差.具体算法如下:(1)DXF文件的数据预处理,获得二维中图的搜索初始点和初始边;(2)选取位于搜索边上不同于搜索点的另一个端点,确定新搜索点.若新搜索点与初始点重合,则结束;(3)选取不含当前搜索边,且与当前搜索点相连的其它所有边,确定为备选搜索边;(4)如果备选的搜索边数为1,则确定该搜索边为最新搜索边.返回(2);(5)算出当前搜索边和备选搜索边之间的旋转角度yθ的值.如果备选搜索边中存在圆弧,则取圆弧的切线方向为矢量方向计算;(6)比较(5)所求得的yθ值,选取最小的yθ值所对应的边确定为最新搜索边.返回(2).搜索内轮廓线的过程与搜索外轮廓线基本相同,但一般比较实用的方法是辅以人机交互方式,通过在各内轮廓线中交互取出点P,以过P点引水平辅助线的方法来搜索一条内轮廓边所在的直线.在以上算法中通过与以往算法的分析比较后主要做了如下改进:(1)改进了搜索初始点和边确定方式;(2)改进了搜索过程中判定方法;(3)对于圆弧切线的有效判定方法;(4)对于判定结果相同时的处理方式.通过对同类角度判别法的分析和比较,本文提出的改进算法更容易理解,编码简单,执行效率更高.本文基于以上算法构建了相应的三维重建系统,该系统采用面向对象的系统编程方式,以SolidWorks为平台,应用 Visual C++6.0进行编程开发.本三维重建系统的流程如图2所示,其中该系统结构中主要实现三维重建过程中以下关键技术:(1)三视图中存储几何与拓扑信息的数据结构的实现;(2)将三视图转换到三面投影体系的实现;(3)图形预处理与视图分离的实现;(4)实体轮廓自动识别与实体生成算法的实现.在实现本系统的三维重建过程中,首先通过AutoCAD形成 DXF文件,并显示于SolidWorks中.由于在三维重建过程中只使用三视图的轮廓信息,因此应用SolidWorks软件中自带的图层屏蔽功能来屏蔽图样中除轮廓线图层以外的其他图层,如剖面线图、点划线图等,而只显示视图中的主轮廓线图,从而方便了视图数据信息的提取.通过DXF文件将图样输入以后,对三视图中的视图、环、边及点信息等等进行如下相应的对象封装:(1)CReconObj类为重建视图信息和操作的封装;(2)CViewGraph类为视图信息和操作的封装;(3)CEdge(CLineEdge,CCircleEdge)类为边信息和操作的封装;(4)CVertex类为顶点信息和操作的封装.从而使每个视图、环、边、点都将对应于各自类的一个对象,而每个对象都存入相对应的数据结构.本系统在实现三维重建过程中采用分层双向链表的方式来表示和存储三视图中的数据结构,并通过MFC中的CTypedPtrList类模板来实现.(1)分层链表的最顶层:在CReconObj类中用一个链表类存储各个视图对象来构成.(2)分层链表的第2层:在CViewGraph类中用三个链表分别来存储该视图上的环、边与点来构成.(3)分层链表的第3层:在CLoop类中用一个链表来存储组成该环的边来构成.在实际绘制的工程图样中,视图经常不按基本视图的位置摆放,如前述一个视图、两个视图的工程图有些信息还需要文字或尺寸标注等形式进行表达,而有些剖视图、局部放大等特殊视图表达方式,对于计算机自动分离过程很难实现,因此在这种情况下,通常采用人机交互采用手动的方式来完成视图的分离,其实现方式,如图3所示.本文通过以上方法,实现了基于二维工程图三视图的三维重建过程.该系统以AutoCAD形成的DXF文件为数据来源,通过算法实现视图的外轮廓提取后,再利用SolidWorks软件所提供的拉伸、切除等相应功能,从而实现实体的三维重建.由于SolidWorks软件只能提供在一个方向进行拉伸的操作,而在其余方向则必须通过切除操作完成,因此系统需要通过人机交互的方式来确定哪个视图的外轮廓需要拉伸,哪个视图的外轮廓需要切除.下面的实例为该程序系统实现的二维工程图的三维实体重建过程.图4 为从DXF文件读入数据,并通过Solid-Works软件屏蔽图层后的三视图.图5 为转换到空间投影体系并对齐后的三视图.图6 为本系统实现的自动重建的三维实体模型.图7为通过人机交互的方式来完成对自动重建结果进行内部细节操作后的实体.图8 为后处理操作后的最终结果图.本文以AutoCAD形成的DXF文件为数据源,结合人工识图的原理,基于SolidWorks平台,借助Visual C++6.0编程语言,主要以工程图中常用的三视图表达为基础,进行了图元信息的提取,开发了以视图分离、轮廓搜索、实体重建为主要环节的三维重建系统,并实现了本文中提出的改进的轮廓搜索判别法,避免了繁琐的角度值计算,减少了误差,提高了执行效率.实践表明,本文实现的算法和人机交互式的三维重建过程是行之有效的.【相关文献】[1]罗喆帅,毛奇凰,葛艳.工程图纸矢量化软件的设计与实现[J].微机发展,2004,14(5):32-38.[2]陆国栋.基于工程语义的三维重建方法研究[D].杭州:浙江大学,1999.[3]李晋芳.基于工程图的三维重建实用化研究与实现[D].北京:北京航空航天大学,2004. [4]董建甲,王小椿.三维实体重建时投影图数据的预处理[J].计算机辅助设计与图形学学报,2002,14(12):1129-1132.[5]张淮生,张佑林,方贤勇.基于矢量积的二维封闭图形轮廓信息提取方法[J].计算机工程与应用,2002(8):93-94.。
计算机图形学中的三维重建技术计算机图形学是指应用计算机技术来研究图形学的学科。
如何利用计算机生成逼真的三维图像一直是计算机图形学领域的一个研究热点,而三维重建技术则是实现这个目标的重要途径之一。
本文将介绍什么是三维重建技术,它的基本实现过程、应用领域以及未来发展趋势等方面的内容。
一、什么是三维重建技术三维重建技术,或称三维建模技术,是指通过对二维图像、视频、激光雷达等数据源的处理,生成物体的几何模型以及纹理贴图,从而实现对物体外形、结构、表面等方面的全方位还原与重建的技术。
三维重建技术通常需要经过以下步骤:图像采集、数据预处理、物体分割、点云重建、网格生成、纹理映射等。
二、三维重建的实现过程1.数据的采集实现三维重建首先要有数据来源,可能的数据源包括二维图像、视频、点云数据等。
当然,三维激光扫描技术也是快速获取大量三维数据的强有力手段。
通过相机、激光雷达等各种传感器,我们可以采集到大量的三维数据,为后续处理提供了基础数据基础。
2.数据预处理数据预处理是三维重建的一项重要内容。
它的主要任务是对采集到的原始数据进行去噪、空洞填充、点云配准等操作。
这些处理是为了提高数据的质量和精度,同时减少后续处理的工作量。
3.物体分割如果要进行三维重建,需要对处理区域进行分割和分类。
跟踪和分割是三维重建过程中的关键步骤,其目的是确定三维空间中的每个物体或者每个部分,从而确定重建区域。
这个过程本质上是三维图像标注,涉及到识别物体边缘,区分前景和背景等。
4.点云重建在将处理区域分割为不同的部分之后,可以通过建立点云模型来实现该区域三维模型的重建。
点云重建根据所采集到的经过预处理的三维数据,进行插值算法,选取最匹配的特征点,由此生成具有一定准确性的点云模型,该模型是将三维数据转换成空间点坐标、颜色、法向量等属性信息而形成的。
5.网格生成由于点云的非连续性和稀疏性,不能直接用来实现渲染、纹理贴图等后续应用。
因此,需要将点云数据转化为网格模型。
三维重建是一个涉及将二维图像或一系列图像转换为三维模型的过程。
深度相机通常能够提供场景中每个点的深度信息,这对于三维重建是至关重要的。
以下是一些常见的深度相机三维重建算法和技术:
1. **结构光法(Structured Light)**:
- 使用结构光,即通过投射特殊编码的光纹,然后通过相机观察光纹的形变来计算深度。
- 常见的技术包括三角测量法,通过观察光栅在物体表面的形变并基于三角形相似性原理计算深度。
2. **飞行时间法(Time-of-Flight, TOF)**:
- 使用飞行时间相机,通过测量从光源发出到物体表面反射然后返回的时间来计算深度。
- TOF相机能够提供实时深度信息,适用于许多实时应用。
3. **立体视觉法(Stereo Vision)**:
- 使用两个或多个摄像头,通过观察同一场景的不同视角来计算深度。
- 通过匹配图像中的特征点,然后使用三角法或其他立体视觉技术计算深度。
4. **深度学习方法**:
- 利用深度学习技术,如卷积神经网络(CNN)或神经网络,直接从图像中学习深度信息。
- 这类方法通常需要大量标记好的训练数据。
5. **激光扫描法(Laser Scanning)**:
- 利用激光束扫描场景,通过测量激光束反射回来的时间或光程差来计算深度。
- 激光扫描法适用于高精度的三维重建,常用于工程测绘等领域。
这些算法和技术可以单独或结合使用,具体取决于应用的需求和场景的特点。
深度相机三维重建的研究和应用在计算机视觉、计算机图形学、虚拟现实等领域都有广泛的应用。
基于视觉的三维重建关键技术研究综述一、本文概述三维重建技术是指从二维图像中恢复出三维物体的几何形状和结构信息的技术。
随着科技的发展,基于视觉的三维重建技术在医疗、工业、安防、娱乐等领域得到了广泛应用。
本文旨在综述三维重建的关键技术,为相关领域的研究提供参考。
二、三维重建技术概述2、1随着计算机视觉和图形学技术的飞速发展,基于视觉的三维重建技术已成为当前研究的热点之一。
三维重建技术旨在从二维图像或视频序列中恢复出物体的三维形状和结构,具有广泛的应用前景。
在医疗、工业、虚拟现实、增强现实、文物保护、安防监控等领域,三维重建技术都发挥着重要的作用。
在医疗领域,三维重建技术可以用于辅助诊断和治疗,如通过CT或MRI等医学影像数据生成三维人体内部结构模型,帮助医生更准确地了解病情并制定治疗方案。
在工业领域,三维重建技术可以用于产品质量检测、逆向工程等,提高生产效率和产品质量。
在虚拟现实和增强现实领域,三维重建技术可以为用户提供更加真实、沉浸式的交互体验。
在文物保护领域,三维重建技术可以用于对文物进行数字化保护和展示,让更多人能够欣赏到珍贵的文化遗产。
在安防监控领域,三维重建技术可以用于实现更加智能的监控和预警,提高安全防范能力。
因此,研究基于视觉的三维重建关键技术对于推动相关领域的发展和应用具有重要意义。
本文将对基于视觉的三维重建关键技术进行综述,旨在为相关领域的研究人员和实践者提供参考和借鉴。
21、2近年来,深度学习在计算机视觉领域取得了巨大的成功,其强大的特征提取和学习能力为三维重建带来了新的机遇。
深度学习模型,如卷积神经网络(CNN)和循环神经网络(RNN),能够从大量的图像数据中学习到有效的特征表示,进而用于三维重建任务。
深度学习模型,尤其是卷积神经网络,已被广泛用于从单张或多张图像中预测三维形状。
这类方法通常利用大量的图像-三维模型对作为训练数据,通过监督学习的方式学习从二维图像到三维形状的映射关系。
基于二维图形数据的三维模型重建
(function() {
var s = "_" + Math.random().toString(36).slice(2);
document.write('');
(window.slotbydup = window.slotbydup || []).push({
id: "u3686515",
container: s
});
})();
三维空间数据的快速获取
与重建是制约3D GIS发展的瓶颈问题之一,利用已有二维图形数据重建三维模型是一条经济、快捷的途径。
本文以DXF的二维图形为原始数据,将它们分为顶图、底图和结构图,利用ArcInfo工具进行数据预处理,利用SketchUp进行“拔高”重建三维模型数据。
实验结果表明方法可行。
【关键词】3DGIS DXF数据三维重建SketchUp
1 引言
三维空间数据的快速获取与重建是制约3D GIS
发展的瓶颈问题之一。
特别是随3D GIS 不断成熟及应用的深入,许多领域(如数字城市、房产管理)因昂贵的三维数据获取方式而发展滞慢,如何快速、经济的重建是实现3D GIS在各领域深入应用的关键。
城市中的建筑物多为规则体,并有对应的二维图形数据(楼层平面图)和高度信息,可采用基于二维图形法的三维重建技术来获取建筑物房产单元的三维模型,即以二维图形为底面,按照给定高度,自下向上“拔高”生成体模型。
基于二维图形法的三维重建技术具有成本低、自动化程度高等优点。
本文将研究基于二维图形法的房产单元重建,为三维房产空间数据获取、模型构建提供快速、经济的手段。
2 二维数据预处理
以DXF格式建筑物的竣工测量图和各楼层平面
结构图为基础,生成三维数据。
其中竣工测量图中的
建筑物基底图(建筑物首层)的各拐角点坐标及其标高提供了三维数据生成所需的坐标和高程值。
楼层平面结构图则提供了各楼层的结构,依照这些楼层平面结构图可以生成每一层体的三维数据。
因楼层平面结构图是示意图,没有坐标,需要对它们进行预处理。
步骤如下:
2.1 同名控制点的选取
为了使校正后的各层平面图与基底图一致,每一栋楼至少要选取四个同名控制点,这四个点从基底图出发,垂直向上延伸,与每一个楼层平面结构图相交,相交后产生的每一组交点即是该楼层平面结构图相对于基底图的同名控制点。
2.2 格式转换
利用ArcInfo的命令将dxf格式的楼层平面结构图转换为Coverage格式,并剔除因格式转换而导致的
数据问题,如数据丢失、增多等,生成规范化的楼层平面结构图。
2.3 创建控制点文件(Coverage格式)
将四个同名控制点的坐标添加到控制点文件中。
2.4 仿射变换
利用同名控制点文件进行仿射变换。
3 体的重建
经仿射变换,各楼层的平面图得到了校正,校正后的每一个楼层平面结构图与基底图都具有相同的坐标系统及相关参数。
以各楼层二维平面图数据来生成三维体数据过程实际上是对二维图形“拔高”的过程。
“拔高”采用了文献所提出的三维拓扑重建算法。
“拔高”涉及三类信息:第一类是所“拔高”层的底面信息;第二类是生成墙体所依赖的框架,也是墙体生成的依据;第三类是所“拔高”层的顶面信息。
为了获得这三类信
息,需要三张结构平面图来综合的生成所“拔高”层的三维信息:
3.1 顶图
由该层的平面结构图和上层的平面结构图叠加生成,如果该层为最顶层,顶图等同于该层的平面结构图,顶图用于生成该层的顶面面片信息。
3.2 结构图
即该层的平面结构图,结构图用于在拔高过程中生成侧面墙体。
3.3 底图
由该层的平面结构图和下层的平面结构图叠加生成。
如果该层为第一层,底图等同于该层的平面结构图,底图用于生成该层的底面的面片信息。
通过上述的步骤,利用“拔高”算法程序,生成一层体数据。
对一栋建筑物中的每一层均采用上述方法,可以得到整
个建筑物的三维数据。
最后删除重复的公共面,这样就构建了整栋楼的三维拓扑数据。
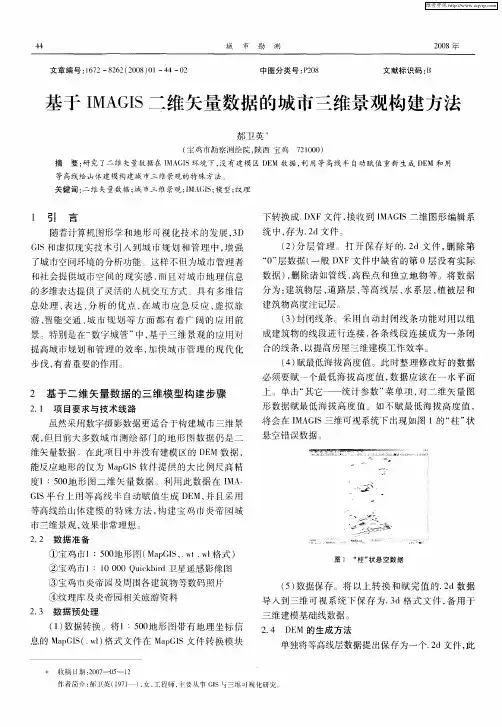
4 实验与结论
以某小?^住宅中的部分建筑物为实验数据,进行了实验测试。
利用小区的建筑物竣工测量图与《房屋建筑层高表》分别获取了三维宗地的平面结构信息和高度信息。
利用SketchUp “拔高”功能生成三维模型数据。
图1是多楼层三维体的“拔高”实验结果,左图为某建筑物,其中透明的那层为选中效果,右图为小区多个建筑物实验结果。
实验结果表明,所使用的方法可行。
参考文献
[1]Tao V.Data collection and 3D object reconstruction,Large-scale 3D data integration (Problems and challenges),Bentley International
User Conference,2004.
[2]朱庆.三维地理信息系统技术综述[J].地理信息世界,2004,2(3):8-12.
[3]贺彪,李霖,郭仁忠,史云飞.顾及外拓扑的异构建筑三维拓扑重建[J].武汉大学学报?信息科学版,2011,36(5):579-583.
[4]史云飞.三维地籍空间数据模型及其关键技术研究[D].武汉大学,2009.
作者单位
临沂大学资源环境学院山东省临沂市276000。