机械原理课程设计 自动喂料机设计.doc
- 格式:pdf
- 大小:715.75 KB
- 文档页数:18
浙江机电职业技术学院多用途自动饲养喂食机设计说明书设计者:指导教师:2013年08月(浙江机电技职业学院,杭州310053)1目录多用途自动饲养喂食机设计说明书 (1)作品内容简介 (3)2.1纵横向推板机构 (6)2.1.1结构组成 (6)2.1.2工作过程 (6)2.2落料控制机构 (8)2.2.1拟定方案 (8)2.2.2结构组成 (9)2.3伸出机构 (10)2.3.1拟定方案 (10)2.4控制电路设计 (10)2.4.2总电路设计 (11)2.4.3电机选用 (12)3.1凸轮的行程计算 (13)3.2驱动电机选择: (15)&4、工作原理及性能分析 (16)4.1工作流程图: (16)&5、创新点及应用 (16)参考文献 (17)作品内容简介本作品是多用途自动饲养喂食机,用于家禽、动物、水产等一些养殖业和畜牧业中,适合于无人环境下完成自动喂食。
该装置主要有可变横纵向活动推板,拨块活动开关和三个限位开关的不同位置分布,使动物或家禽饮食更加丰富,并且能够多种不同食粮按比例自动的搭配。
图1多用途自动饲养喂食机示意图&1、研制的背景及意义我国对养殖业提供了许多的优惠政策:养殖业用地按种植业用地对待。
养殖业用水用电按种植业计算征收费用。
金融部门对养殖业小额贷款要放开,加大信贷力度,可以实行联户担保。
对各级农业产业化龙头企业、种畜禽生产企业、优势畜产品产区、奶牛养殖小区和各类规模养殖场,有不同的项目支持。
随着国家对养殖业的重视,靠养殖业致富的人渐渐增多,越来越多的人们进入到养殖业这个兴起的行业中去,加上人们现在生活水平的不断提高,市场的竞争力也不断加大,如何提高养殖业和畜牧业在市场中的竞争力是养殖户和生产者为其关注的事情。
养殖业的兴起造就了喂食机的诞生。
我们针对此现象进行了调查和访问,设计并制作了这个多用途自动饲养喂食机,为养殖人员提供便利,以减轻养殖户的成本投入、提高效率,抢占市场。
北京化工大学第六届“萌芽杯”技术报告学院名称: 作品类别: 作品名称: 队伍名称: 指导教师: 队长:参赛队员: 信息科学与技术学院B类自动喂食器Dream Factory商晓东熊善海李金海蔡玉斌蒙宁佳马程川20U年 5 月20日摘要喂食器总共包括五个键,FUNCTION键,ADD键(即时喂食键),DEC键,RESET 键,ON/OFF 键。
AT89S52单片机用于计时,检测键盘,和控制电机,定时时间及电机工作时间山按键检测输入,单片机每20ms计时中断一次。
当计时时间与设定时间参数一致时,单片机发出脉冲信号控制电机正转反转。
单片机等模块封装在长方形的控制盒中,控制盒正面依次为LCD,按键,电源指示灯,电源开关。
侧面为USB电源接口,电机控制线电源线出口。
电机和电机驱动模块封转在喂食漏斗中,喂食漏斗固定在控制盒的背面,控制盒的背面有挂钩,可以以悬挂的方式固定在鱼缸壁上。
设计出这样一款自动喂食器能够方便人们的生活,这是我们的动机。
我们的作品完全自主研发,运行稳定,操作方便,成本低廉,具有很大的潜在商业价值,而且有很大的拓展空间。
关键词:单片机,步进电机,LCD显示器第2章 喂食器的功能及操作说............................... 4 第节喂食器的外观图 ........................................4 第节喂食器功能的详细说明 ..................................5 第节 喂食器的操作说明 ..................................... 5 第3章 喂食器的理论设计过程第节喂食器的设计始末 (6)第节喂食器的设计思路 (6)第节喂食器最终方案工作原理 ................................ 7 第4章软件设计 . (9)第节软件开发工具 ......................................... 9 第5章结论 . (10)附录 (11)目录 .................................................... 3 第1章引言 ............................................... 4 目录为响应学校关于加强大学生的创新意识、合作精神和创新能力的培养的号召,我们组积极参加了学校举办的“萌芽杯”科技创新大赛。
机械创新课程设计说明书设计题目:自动喂鱼机设计者:xxx学号:xxxxxx班级:10机制本一班专业: 机械设计制造及其自动化学院:机电工程学院2022年4月27日摘要[摘要]:自动喂鱼机是一款用于自动、定量投放鱼饲料的设备。
养鱼赏鱼是一个充满乐趣的过程,因此,随着时代的发展,人民生活水平的逐步提高,在家中养鱼赏鱼作为人们休闲的一种情趣而变得越来越普遍。
然而,人们总有出差工作、探亲访友不在家的时候,此时可爱的鱼儿不就要饿肚子了么?为了帮助人们解决喂鱼的后顾之忧,自动喂鱼机便应运而生。
自动喂鱼机通过应用齿轮传动机构、曲柄滑块机构和电路控制等简单机构实现了喂鱼的自动化、定量化的目标要求。
[关键词]:自动化;定量AbstractsThe automatic feed fish machine is an equipment for putting on the feed of fish automaticly and quantitaly.Feeding and watching fish is a fun process.Therefore,with the development of the times and the improvement of the life level,feeding and watching fish at home are becoming more and more widely as a kind of interest.However,is fish hungry when people are leaving because of working on a business trip or visiting?In order to help people solve the trouble back that feeding the fish at home,t he automatic feed fish machine arises at the historic moment.The automatic feed fish machine realized the automation and quantitative by the using of the gear dive mechanism,the crank slider mechanism,the circuit control and so on.Key words:automation ; quantitative .目录一、设计任务 (1)1、设计题目及结构简介 (1)2、原始设计数据 (1)3、设计内容 (1)二、原动机的选择 (2)三、机械运动机构设计 (2)1、推瓶机构的设计 (2)2、洗瓶机构的设计 (4)四、零部件尺寸机构的设计及计算 (4)1、摆动导杆机构的尺寸设计及运动分析 (5)2、洗瓶机构的尺寸设计及运动分析 (6)3、工作循环图 (8)五、三维效果图 (9)六、课程设计学习心得 (9)参考文献 (10)一、设计任务1、设计题目和结构简介本次设计自动喂鱼机的基本功能和设计思路,根据给定的规定动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成自动喂食机理论方案的创新设计,并绘制必要的零部件图,其中包括装置的原理方案构思和拟定;原理方案的实现、传动方案的设计,主要结构的设计简图;设计计算与说明。
给料机课程设计一、课程目标知识目标:1. 学生能理解并掌握给料机的定义、分类及工作原理;2. 学生能描述给料机在工业生产中的应用及重要性;3. 学生能了解给料机的主要部件及其功能。
技能目标:1. 学生能够运用所学的知识,分析并解决给料机在实际生产中的问题;2. 学生能够设计简单的给料机工作流程,提高实际操作能力;3. 学生能够通过查阅资料,了解并掌握给料机的发展趋势和新技术。
情感态度价值观目标:1. 培养学生热爱科学,积极探究工业生产中机械设备奥秘的兴趣;2. 增强学生对我国工业发展的自豪感,培养爱国主义情感;3. 培养学生的团队合作精神,提高沟通与协作能力;4. 培养学生遵守安全生产规定,增强安全意识。
分析课程性质、学生特点和教学要求,本课程目标具体、可衡量,旨在使学生在掌握给料机相关知识的基础上,提高实际操作能力,培养创新意识和安全意识,为我国工业发展贡献力量。
后续教学设计和评估将围绕这些具体学习成果展开。
二、教学内容1. 给料机的定义、分类及工作原理- 介绍给料机的概念、分类方法及其各自特点;- 深入剖析给料机的工作原理及其在工业生产中的应用。
2. 给料机的主要部件及其功能- 详细讲解给料机的各个部件名称、作用及其相互关系;- 分析给料机关键部件的维护与保养方法。
3. 给料机在工业生产中的应用及重要性- 通过实例介绍给料机在各个行业中的应用场景;- 阐述给料机在提高生产效率、保证产品质量方面的重要性。
4. 给料机操作与维护- 指导学生掌握给料机的操作步骤及注意事项;- 分析给料机故障原因,教授常见故障排除方法。
5. 给料机发展趋势与新技术- 概述给料机的发展历程及未来发展趋势;- 介绍新型给料机及其技术特点。
教学内容安排与进度:第一课时:给料机的定义、分类及工作原理;第二课时:给料机的主要部件及其功能;第三课时:给料机在工业生产中的应用及重要性;第四课时:给料机操作与维护;第五课时:给料机发展趋势与新技术。
肉牛自动喂食毕业设计摘要:本文针对肉牛喂食过程中的现有问题,设计了一种自动喂食系统,旨在提高肉牛喂食效率、减少人力成本、提高畜牧养殖效益。
该系统通过自动感应、控制和配送饲料,可以实现对肉牛的精准、定量喂食。
本文首先分析了当前肉牛喂食存在的问题,然后介绍了自动喂食系统的设计原理和技术方案,最后进行了系统的实验验证和性能评估。
实验结果表明,该自动喂食系统能够满足肉牛喂食的要求,具有较好的实用性和经济性。
关键词:肉牛、自动喂食、系统设计一、引言随着人们对肉制品需求的增加,肉牛养殖业逐渐成为畜牧养殖业的重要组成部分。
传统的手工喂食模式存在喂食不均匀、浪费饲料、耗费人力等问题,已经不能满足现代养殖业的需求。
设计一种能够自动喂食的肉牛喂食系统,成为了当前的研究热点。
二、现有问题分析1. 喂食不均匀传统的手工喂食方式依赖于人工管理,难以保证每头肉牛都能获得均匀的饲料摄入,导致养殖效果参差不齐。
2. 浪费饲料人工投喂难以做到精准的饲料量控制,往往会导致饲料浪费,增加养殖成本。
3. 耗费人力大规模的肉牛养殖场面临着喂食人力成本高的问题,对养殖场的经济效益造成一定的影响。
三、系统设计原理与技术方案基于上述问题,我们设计了一种肉牛自动喂食系统,其主要原理是通过感应装置感知肉牛的进食需求,然后通过控制系统根据需要配送相应的饲料。
技术方案主要包括以下几个方面:1. 感应装置通过在牛舍内设置红外感应器或压力传感器,实时感知肉牛的位置和进食行为,以便实时掌握肉牛的饲料需求。
2. 控制系统采用微型计算机或单片机作为控制核心,根据感应装置的信号实时调控饲料的运输和释放,保证每头肉牛都能得到合适的饲料供给。
3. 饲料配送使用输送带或传送机构将饲料从存储仓库输送至肉牛喂食区域,通过控制系统对饲料进行精准的定量配送,满足肉牛的饲料需求。
四、系统实验验证和性能评估为了验证自动喂食系统的有效性,我们设计了实验方案并进行了实验验证。
实验结果表明,该系统具有以下优点:1. 喂食均匀自动喂食系统能根据肉牛的实际需求精准控制饲料的分配,确保了每头肉牛的喂食均匀性。
摘要给料装置自动化是随着现代信息技术与控制技术的进步而发展起来的,广泛应用于机床、矿山、冶金等行业。
从以前的手工给料,到半自动化,再到自动化,甚至智能化,给料装备发展迅猛。
本课题所改进的给料装置是应用于铸造球墨铸铁管流水线上的孕育剂的给料装置。
不同直径的管道孕育剂的需要量不同,否则会影响铸管的抗腐蚀性能和耐用程度。
目前所使用的给料装置只能给DN300mm的管道定量加料,而DN1000mm的管道需要人工补料。
本设计完成了给料装置传动系统的设计与零件的校核;基于UG的三维设计与表达;PLC的编程设计。
通过本设计实现了自动控制进料量的孕育剂自动给料装置。
此装置只需要工人根据所生产的管道的直径选择选择相对应速度就可以了,为管道质量提供了保障,同时节省了人力。
关键词:给料装置;改造设计;三维建模;强度校核AbstractWith the development of information technology and automatic technology, the technology of automatic feeding becomes more and more mature. And now automatic feeding devices are generally used in the field of machine tools、mines and metallurgical industries. From the beginning of manual feeding to the semi-automatic feeding and automatic feeding, even artificial intelligence feeding, the feeding device really made great progress.The feeding device remade in this subject operates on the pipelining of casting nodular cast iron pipe. The pipes of different caliber demand different qualities of inoculant, or this will decrease the properties of anti-corrodibility and durable performance. At the moment, the feeding device working could provide accurate inoculant for the casting of pipes in DN 300 mm while the type of DN 1000 mm needs extra inoculant by hand labor.After the whole design, the design of drive system and the calculation of components have been finished. The three-dimensional design based on UG and the design of PLC program are also fulfilled. The design of automatic feeding device has been completed. According to the caliber of the pipe, the workers can choose the right speed so that the qualities of the pipes could be warrantable.Keyword: Feeding device; Remaking; Three-dimensional modeling; Strength calculation目录1 绪论 (1)1.1自动进料装置的发展过程及趋势 (1)1.2课题的研究背景与意义 (1)1.3课题主要内容。
机械设计学课程设计院(系):机械工程学院2010年7月11日加热炉自动装料机的设计目录第一章设计任务1目的及意义 (1)1.2设计要求 (2)第二章功能原理设计2.1总功能 (3)2.2功能分析 (3)2.3方案及评价 (4)第三章选定方案的详细说 (10)第四章机械系统方案设计4.1总体功能机械系统设计方案 (11)第五章结束语 (13)参考文献 (15)附录第一章设计任务1.1目的及意义一﹑目的《机械设计学》课程设计是《课程设计学》课程的一个主要实践环节,也是机械设计及其自动化方向学生全面的应用该课程基础理论与专业进行设计的一次综合训练。
通过课程设计﹑以功能设计结构设计和商品化设计为核心内容,初步树立正确的设计思想,掌握机械产品形成过程,培养在掌握现代化设计技术的基础上更加创造性地从事设计工作的能力和思想。
该机器用于向加热炉内送料。
装料机由电动机驱动,通过传动装置使装料机推杆做往复移动,将物料送入加热炉内。
二、意义加热炉自动装料机可在无人看管的情况下实现自动送料,这样既省时又省力,大大提高工作效率,因此加热炉装料机在工业生产中的使用越来越广泛。
1.2设计要求一、任务完成向加热炉内自动送料。
1二、设计要求—1图1-1(1)完成加热炉装料机的功能原理设计。
(2)针对确定的功能原理设计方案,完成机械运动系统方案设计。
(3)针对确定的机械系统设计方案,完成必要的运动分析和设计计算(4)设计技术要求:室内工作,需要5台,动力源为三相交流电动机,电动机单向转动,载荷较平稳,转速误差<4%;使用期限为10年,每年工作250天,每天工作16小时,大修期为3年。
2第二章功能原理设计所谓功能原理设计就是机械产品设计的最初环节,事先要针对该产品的主要功能原理性思想。
这种针对主要功能原理型设计,简称“功能原理设计”.2.1总功能本次设计总功能为:实现加热炉装料机的自动装料。
2.2功能分析本套系统主要包括:动力装置,自动进料装置和传动装置。
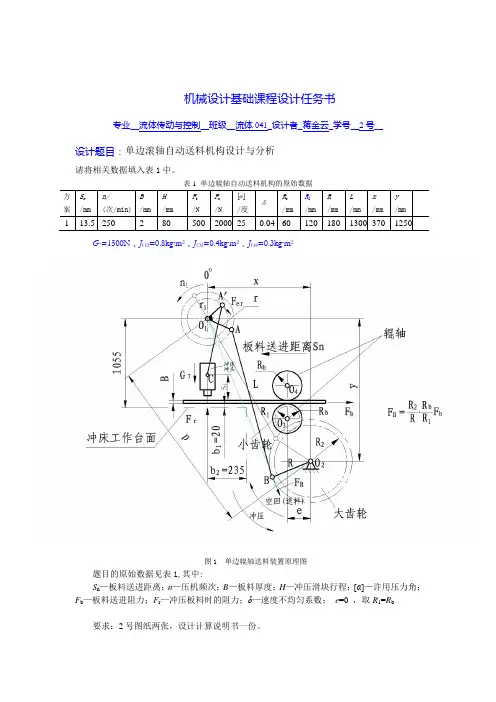
机械设计基础课程设计任务书专业__流体传动与控制__班级__流体041_设计者_蒋金云_学号__2号__设计题目:单边滚轴自动送料机构设计与分析请将相关数据填入表1中。
表1 单边辊轴自动送料机构的原始数据G7=1500N,J O2=0.8kg·m2,J O3=0.4kg·m2,J O4=0.3kg·m2图1 单边辊轴送料装置原理图题目的原始数据见表1,其中:S n—板料送进距离;n—压机频次;B—板料厚度;H—冲压滑块行程;[α]—许用压力角;F b—板料送进阻力;F r—冲压板料时的阻力;δ—速度不均匀系数;e=0 ,取R1=R b要求:2号图纸两张,设计计算说明书一份。
设计期限:2006年6月19日至2006年6月23日颁发日期:2006年6月18日一、机构尺寸综合已知数据见表1, 要求确定机构尺寸:l O1A , l O1A' , l A'C , 及开始冲压时滑块C 点至板料的距离S i 。
步骤:1.求辊轴转角 92.1286080135180=⨯⨯=⨯⨯=ππαb n R R S2.摇杆摆角 46.641206092.12821=⨯==R R RA αα 3.机架中心距 6mm .1303mm 1250370222221=+=+==y x L P O O4.曲柄半径r = l O1A256.93042sin)2sin )(2sin (2cos22)(22222222222221=----++==AAAAAO R l p l l l R P lr αααα96mm r =所以5.曲柄滑块机构曲柄半径r 1 40mm mm 2802'11====H l r A O 6.根据许用压力角[α]调节连杆长l 1,取l 1=560mm, 并验算:648mm .94mm sin2540]sin[2/'1==≥=H l l C A 二、用相对运动图解法,求滑块和板料的速度分析 1. 求v A'及v Av A =r 1ω1=40×26 mm/s =1040mm/s, v A =rω1=96×26 mm =2496mm/s 其中、 ω1=2πn /60=2π×250/60 rad/s =26 rad/s 2.列出矢量方程,求v C 、 v B→→→+=''CA A C v v v→→→+=BA A B v v vB bv RR R R v 12=板料 0点位置:取比例尺μv =60mm/mm ,则pa ′=17mm ,pa =41mm v c =0,v B =39.5×60 mm/s =2370mm/s1.58m/s 1580mm/s 2370mm/s 180606012012==⨯⨯⨯==B b v R R R R v 板料1点位置:取比例尺μv =60mm/mm ,v c =9×60 mm/s =540mm/s=0.54mm/s ,v B =31×60 mm/s =1860mm/s1.24m/s 1240mm/s 1860mm/s 3212==⨯==B b v R R R R v 板料2点位置:取比例尺μv =60mm/mm , v c =15×60 mm/s =900mm/s=0.90mm/s ,v B =15.5×60 m/s =0.93m/s62m/s .093m/s .03212=⨯==B b v R R R R v 板料3点位置:取比例尺μv =60mm/mm , v c =17×60 m/s =1.02m/s ,v B =5×60 m/s =0.3m/s2m/s .03m/s .03212=⨯==B b v R R R R v 板料4点位置:取比例尺μv =60mm/mm , v c =15×60 m/s =0.90m/s ,v B =0×60 m/s =0m/s0m/s 0m/s 3212=⨯==B b v R R R R v 板料5点位置:取比例尺μv =60mm/mm , v c =10×60 m/s =0.60m/s ,v B =0×60 m/s =0m/s0m/s 0m/s 3212=⨯==B b v R R R R v 板料6点位置:取比例尺μv =60mm/mm , v c =0m/s ,v B =0m/s0m/s 0m/s 3212=⨯==B b v R R R R v 板料 7点位置:取比例尺μv =60mm/mm , v c =8.5×60 m/s =0.51m/s ,v B =0×60 m/s =0m/s0m/s 0m/s 3212=⨯==B b v R R R R v 板料8点位置:取比例尺μv =60mm/mm , v c =15×60 m/s =0.90m/s ,v B =0×60 m/s =0m/s0m/s 0m/s 3212=⨯==B b v R R R R v 板料9点位置:取比例尺μv =60mm/mm , v c =17×60 m/s =1.02m/s ,v B =7×60 m/s =0.42m/s28m/s .042m/s .03212=⨯==B b v R R R R v 板料10点位置:取比例尺μv =60mm/mm , v c =14×60 m/s =0.84m/s ,v B =24×60 m/s =1.44m/s96m/s .044m/s .13212=⨯==B b v R R R R v 板料11点位置:取比例尺μv =60mm/mm , v c =8×60 m/s =0.48m/s ,v B =41×60 m/s =2.46m/s64m/s .146m/s .23212=⨯==B b v R R R R v 板料12点位置:取比例尺μv =60mm/mm , v c =11×60 m/s =0.66m/s ,v B =34×60 m/s =2.04m/s36m/s .104m/s .23212=⨯==B b v R R R R v 板料作滑块7的位移线图(s -φ)曲线,板料的位移线图(s ′-φ)曲线。
机械创新课程设计说明书设计题目:自动喂鱼机设计者:xxx学号:xxxxxx班级:10机制本一班专业: 机械设计制造及其自动化学院:机电工程学院2019年6月4日摘要[摘要]:自动喂鱼机是一款用于自动、定量投放鱼饲料的设备。
养鱼赏鱼是一个充满乐趣的过程,因此,随着时代的发展,人民生活水平的逐步提高,在家中养鱼赏鱼作为人们休闲的一种情趣而变得越来越普遍。
然而,人们总有出差工作、探亲访友不在家的时候,此时可爱的鱼儿不就要饿肚子了么?为了帮助人们解决喂鱼的后顾之忧,自动喂鱼机便应运而生。
自动喂鱼机通过应用齿轮传动机构、曲柄滑块机构和电路控制等简单机构实现了喂鱼的自动化、定量化的目标要求。
[关键词]:自动化;定量AbstractsThe automatic feed fish machine is an equipment for putting on the feed of fish automaticly and quantitaly.Feeding and watching fish is a fun process.Therefore,with the development of the times and the improvement of the life level,feeding and watching fish at home are becoming more and more widely as a kind of interest.However,is fish hungry when people are leaving because of working on a business trip or visiting?In order to help people solve the trouble back that feeding the fish at home,t he automatic feed fish machine arises at the historic moment.The automatic feed fish machine realized the automation and quantitative by the using of the gear dive mechanism,the crank slider mechanism,the circuit control and so on.Key words:automation ; quantitative .目录一、设计任务 (1)1、设计题目及结构简介 (1)2、原始设计数据 (1)3、设计内容 (1)二、原动机的选择 (2)三、机械运动机构设计 (2)1、推瓶机构的设计 (2)2、洗瓶机构的设计 (4)四、零部件尺寸机构的设计及计算 (4)1、摆动导杆机构的尺寸设计及运动分析 (5)2、洗瓶机构的尺寸设计及运动分析 (6)3、工作循环图 (8)五、三维效果图 (9)六、课程设计学习心得 (9)参考文献 (10)一、设计任务1、设计题目和结构简介本次设计自动喂鱼机的基本功能和设计思路,根据给定的规定动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成自动喂食机理论方案的创新设计,并绘制必要的零部件图,其中包括装置的原理方案构思和拟定;原理方案的实现、传动方案的设计,主要结构的设计简图;设计计算与说明。
毕业设计(论文)题目:池塘自动喂养机设计及三维造型学院:机械与车辆学院专业:机械工程及自动化学生姓名: 1111指导教师:曾亮华摘要:在水产养殖行业中,增氧技术,疾病防治,饲料配方等方面都已有相当成熟的产品。
唯有饲料投喂,直至目前还使用比较落后的人工划船手动抛料的方法,这种方法抛洒不均匀,影响饵料的利用率,还破坏池塘水质;既费时又费力,还受日晒雨淋之苦。
当前市场上所销售的传统水产喂养机虽然型号齐全,功能优越,但仍不能满足水产养殖行业。
例如普遍使用的抛洒箱式喂养机,其组成包括料箱盖、料箱、接料斗、送料振动盒、抛料盘罩总成、主电机、防雨板、偏心连杆、振动电机、振动电机座、电器控制盒、调整手柄、锁紧螺母、机架及地线。
该机能替代人工自动定时、定量喷洒各种规格的颗粒饲料喂养。
由于采用振动式原理进行分料,从根本上解决了其它机型在分料过程中易产生的问题,如卡料、转堵等故障。
但该机只能安放在池塘边或者跳板上,抛洒角度只有90-100度,投料距离只有10米,一部喂养机完全满足不了一个池塘的需要,不能完成全塘均匀投喂。
为了改进这些缺陷,某些公司也研制了一种全自动喂养机,该设备主要由控料箱、送料管、喷料器、浮艇等组成。
所有操作数据均由液晶显示器显示,只需要调整按钮,显示器就能显示出相应控制数据,包括投饵份量,投饵速度,投饵间隔。
抛料器以每分钟1440转360度全方位抛洒饵料,抛洒直径可达20米,投饵距离远,投饵面积大,投饵均匀。
完全填补了抛洒箱式喂养机的缺点。
Abstract:The aquaculture industry, aeration technology, diseaseprevention, feed formulation and other aspects have beenquite mature products. Only the feed, until now also uses the method of artificial rowing manual polishing material is backward, this method by the uneven, affecting the utilization of food, but also destroy the pond; which is time-consuming and laborious, but also by the sun and rain. Traditionalfisheries feeding machine sales market currentalthough models complete, superior performance, but still can not meetthe aquaculture industry. For example, the widespread useof throwing type feeding machine, which comprisesa box cover, hopper, hopper, feeding vibration box, throwing tray cover assembly, a main motor, flashing, the eccentric connecting rod, the vibration motor, vibration motor, electric control box, a regulating handle, locks the nut, machine frame and wire. Granular feed and it can substitutefor artificial automatic timing, quantitative spraying of various specifications. Due to the vibration principle ofmaterials, from the fundamental solution to the other type is easy toproduce the material in the process of problems,such as card data, blockage fault. But the machine can only be placed in the pond or the springboard, throwing angleonly 90-100 degrees, the feeding distance of only 10 meters, a feeding machine which can not meet the needs of a pond, do not complete afull tang uniform feeding.In order to improve these shortcomings, some companieshave developed a kind of automatic feeding machine, the device ismainly composed of a control box, a feeding tube, thedispenser, floating boat. All data were displayed by the LCD, only need to adjust the display button, will show the corresponding control data, including feeding amount,feeding speed, feeding interval. Throwing feeder to 1440 per minute to 360 degreesall-around throwing bait, baitthrowing up to 20 meters in diameter, long distance, largearea uniform feeding, feeding. Completelyfill the throwingtype feeding machine faults.目录:摘要: (1)Abstract: (8)目录: (10)一,自动喂鱼机的背景 (11)1.1自动喂鱼机的现状 (11)1.2自动喂鱼机的意义 (12)1.3自动喂鱼机现有的分类 (12)二,设计方法 (12)2.1自动喂鱼机设计思路 (12)2.2自动加料结构的选用及其设计 (13)2.3电机的选用及计算 (15)他励 (16)并励 (16)串励 (17)复励 (17)2.4液压泵的选用及注意事项 (18)联轴器 (18)液压油箱 (19)滤油器 (19)三,设计方案验证 (20)3.1输送方案的可行性分析 (20)四,总结 (20)五,致谢 (21)六,参考文献 (22)一,自动喂鱼机的背景1.1自动喂鱼机的现状在水产养殖行业中,增氧技术,疾病防治,饲料配方等方面都已有相当成熟的产品。

设计题目步进送料机学院机电工程学院专业机械设计制造及其自动化班级学号设计者指导教师2010年7月5目录前言 (2)第一章设计要求 (3)1.1 设计题目 (3)1.2 设计任务 (4)第二章功能分解 (4)第三章机构及动力源选用 (5)3.1 机构选用 (5)3.2动力源的选择 (5)3.2.1常用电动机的类型及主要特点 (6)3.2.2电动机的容量选择 (6)3.2.3 电机的选择 (7)第四章机构组合 (7)第五章运动协调设计 (8)5.1 传动比设计 (8)5.2杆件尺寸设计 (9)5.3运动循环图 (10)第六章课程结束语 (10)参考文献 (11)前言机械原理课程设计能够培养机械类专业学生的创新能力,是学生综合运用机械原理课堂所学理论知识和技能解决实际问题,获得工程技术训练的必不可少的实践性教学环节。
通过本课程的设计过程,学生可以综合应用所学过的机构组成原理及各种常用机构的结构组成、运动原理、工作特点及应用场合等知识,训练学生掌握对各种常用机构的选型、组合、分析等,并使学生更具创新能力。
通过为期一周的课程设计,我已较好的完成了设计任务,并对机械原理课堂上的理论知识有了进一步的熟悉和了解,自己的能力得到了很大的提升。
第一章 设计要求1.1设计题目设计某自动生产线的一部分——步进送料机。
如图1所示,加工过程要求若干个相同的被输送的工件间隔相等的距离a ,在导轨上向左依次间歇移动,即每个零件耗时t1移动距离a 后间歇时间t2。
考虑到动停时间之比K =1t /2t 之值较特殊,以及耐用性、成本、维修方便等同素,不宜采用槽轮、凸轮等高副机构,而应设计平面连杆机构。
具体设计要求为:(1)电机驱动,即必须有曲柄。
(2)输送架平动,其上任一点的运动轨迹近似为虚线所示闭合曲线(以下将该曲线简称为轨迹出线)。
(3)轨迹曲线的 AB 段为近似的水平直线段,其长度为 a ,允许误差±c (这段对应于工件的移动);轨迹曲线的CDE 段的最高点低于直线段AB 的距离至少为b ,以免零件停歇时受到输送架的不应有的回碰,有关数据见表1。
目录1前言 (1)2带式喂料机总体方案的设计 (1) (1) (1) (1)总机型的选择 (2)3主要部件的设计选择 (2)输送带的设计 (2)传动滚筒(头轮)的选型 (5)改向滚筒(尾轮)的选型 (6)给料装置的设计 (7)拉紧装置的选用 (8)清扫装置的设计 (9)托辊的设计选用 (9)圆周驱动力 (12)传动功率计算 (16)电动机的选择 (17)传动方案的分析选择 (18)减速器的选择 (19)V型带传动的设计 (20)4 喂料机其他部件的设计和选型 (23)联轴器设计选用 (23)控制电路的设计 (24)5 结论 (25)6 致谢 (26)参考文献 (26)英文摘要 (27)带式喂料机的设计摘要:带式喂料机主要是以传送带运动为基本形式的喂料机械。
本文在给定的原始数据的基础上,进行了带式喂料机的总体结构设计、传动方案的论证分析;在此基础上,进行了驱动装置中的电动机、联轴器、减速器等的设计选用;同时对带式喂料机的电控原理进行了相应的阐述。
关键词;带式喂料机电动机联轴器减速器1前言喂料机是料仓装置的重要组成部分,通常安装在料仓或卸料漏斗的下方,安装生产流程的需要均匀定量的向输送机或其他装置给料,犹如调节流量的阀门。
喂料机是物料搬运机械化和自动化中的辅助设备。
按工作构件的运动方式,喂料机可分为3种:①直线式;②回转式;③往复式。
而带式喂料机就属于直线式的,带式喂料机给料量大,结构简单,适用于多种物料,故可较为普遍的使用。
2带式喂料机总体方案的设计带式喂料机是一种传统的排料设备,由于具有能承受仓压、运转平稳可靠、给料量容易调节等优点,至今任然广泛的应用于煤炭、冶金、化工等部门。
1、物料名称:石英砂2.、物料容重:3、工作方式:连续4、处理能力4吨/小时5、水平输送距离3米6、物料粒径:20目带式喂料机主要由导料斗、输送带、驱动滚筒、改向滚筒、托辊、卸载装置、清扫装置等部分构成。
喂料机为使料仓能够顺利排出,料仓后壁倾角最好设计为55-65度。
课程设计自动推料机一、教学目标本课程的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握自动推料机的基本原理、结构和应用;技能目标要求学生能够运用自动推料机解决实际问题,并进行简单的故障排除;情感态度价值观目标要求学生培养对自动推料机的兴趣和好奇心,提高对工程技术的认同感和责任感。
通过本课程的学习,学生将能够理解自动推料机的工作原理,熟悉其各个部件的功能和相互关系,掌握自动推料机的操作方法和维护技巧。
同时,学生将能够运用自动推料机解决实际问题,如物料输送、自动化生产线等,并进行简单的故障排除。
此外,学生将培养对自动推料机的兴趣和好奇心,提高对工程技术的认同感和责任感,培养创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括自动推料机的基本原理、结构和应用。
首先,将介绍自动推料机的工作原理,包括电力系统、控制系统、机械结构等方面。
然后,将介绍自动推料机的各个部件,如电机、传感器、执行器等,并讲解它们的功能和相互关系。
接下来,将介绍自动推料机的应用领域,如物料输送、自动化生产线等,并通过实际案例进行分析。
最后,将介绍自动推料机的操作方法和维护技巧,以及如何进行简单的故障排除。
三、教学方法为了激发学生的学习兴趣和主动性,将采用多种教学方法进行教学。
首先,将采用讲授法,以讲解自动推料机的基本原理、结构和应用。
其次,将采用讨论法,让学生通过小组讨论和分享,加深对自动推料机相关知识的理解和应用。
此外,将采用案例分析法,通过分析实际案例,让学生了解自动推料机在实际工程中的应用和解决问题的方式。
最后,将采用实验法,让学生亲自动手操作自动推料机,进行实验和实践,增强学生的实际操作能力和创新能力。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备适当的教学资源。
教材方面,将选择一本与自动推料机相关的教科书,提供基本的知识框架和理论基础。
参考书方面,将提供一些与自动推料机相关的专业书籍,供学生深入学习和参考。
自动送料机系统毕业设计自动送料机系统毕业设计一、引言自动送料机是一种广泛应用于工业生产线的机械设备,它能够自动将原材料或半成品从一个工作站输送到另一个工作站,大大提高了生产效率和工作质量。
本文将探讨自动送料机系统的毕业设计,并介绍其中的关键要素和技术。
二、设计目标在设计自动送料机系统时,首先需要明确设计目标。
设计目标通常包括以下几个方面:1. 提高生产效率:自动送料机系统能够减少人工操作,提高生产效率,降低劳动力成本。
2. 提高工作质量:通过自动化的方式,自动送料机系统可以减少人为因素对生产过程的影响,提高工作质量和产品一致性。
3. 安全可靠:自动送料机系统需要具备安全可靠的特性,确保在工作过程中不会对操作人员和设备造成伤害。
三、系统组成自动送料机系统主要由以下几个组成部分构成:1. 输送带:输送带是自动送料机系统的核心部件,它能够将物料从一个工作站输送到另一个工作站。
输送带通常由电机驱动,具备可调节速度和方向的功能。
2. 传感器:传感器用于检测物料的位置和状态,以便控制输送带的运行。
常用的传感器包括光电传感器、压力传感器和接近传感器等。
3. 控制器:控制器是自动送料机系统的大脑,它接收传感器的信号,并根据预设的逻辑控制输送带的运行。
控制器通常由微处理器或可编程逻辑控制器(PLC)实现。
4. 人机界面:人机界面是操作人员与自动送料机系统进行交互的界面,它通常由触摸屏或按钮等设备组成,用于设定参数和监控系统运行状态。
四、关键技术在设计自动送料机系统时,需要掌握以下关键技术:1. 传感技术:传感技术是自动送料机系统的基础,通过合理选择和使用传感器,可以实现对物料位置、状态和运动的准确监测。
2. 控制算法:控制算法是自动送料机系统的核心,它决定了系统如何根据传感器信号控制输送带的运行。
合理设计控制算法可以提高系统的稳定性和精确度。
3. 通信技术:自动送料机系统通常需要与其他设备进行数据交互,如与上游设备进行物料接收和下游设备进行物料输出。
课程设计自动推料机一、课程目标知识目标:1. 让学生掌握自动推料机的基本概念、工作原理及组成部分;2. 使学生了解自动推料机在工业生产中的应用及优势;3. 引导学生理解自动推料机与相关学科知识(如机械、电子、编程等)的联系。
技能目标:1. 培养学生运用所学知识分析、解决实际问题的能力;2. 提高学生动手实践能力,学会使用相关工具、仪器对自动推料机进行操作和维护;3. 培养学生团队协作能力,学会在项目中进行有效沟通与分工。
情感态度价值观目标:1. 激发学生对自动化技术及工业生产的兴趣,培养其探索精神和创新意识;2. 培养学生关注社会发展、具备责任感和使命感,认识到自动化技术对国家经济和产业升级的重要性;3. 引导学生树立正确的价值观,认识到科技进步应服务于人类福祉,遵循可持续发展原则。
课程性质:本课程为实践性较强的学科课程,结合理论知识与实践操作,培养学生综合运用所学知识解决实际问题的能力。
学生特点:六年级学生具有较强的求知欲和动手能力,对新鲜事物充满好奇心,具备一定的团队协作能力。
教学要求:注重理论与实践相结合,突出学生的主体地位,关注个体差异,提高学生的自主学习能力。
通过课程学习,使学生在知识、技能、情感态度价值观等方面取得具体的学习成果。
为实现课程目标,将目标分解为具体的学习任务和评估指标,为后续教学设计和评估提供依据。
二、教学内容1. 自动推料机概述- 了解自动推料机的定义、分类及发展历程;- 掌握自动推料机在工业生产中的应用场景。
2. 自动推料机的工作原理与组成- 学习自动推料机的工作原理;- 了解自动推料机的各个组成部分及其功能。
3. 自动推料机的操作与维护- 学习自动推料机的操作流程;- 掌握自动推料机的日常维护与保养方法。
4. 自动推料机项目实践- 分析实际生产案例,进行小组讨论与分享;- 按照教学要求,完成自动推料机模型搭建与调试。
5. 自动推料机与相关学科知识联系- 探讨自动推料机与机械、电子、编程等学科知识的关联;- 分析跨学科合作在自动推料机设计与改进中的应用。