2013中国教育机器人大赛智能搬运比赛演示程序说明
- 格式:doc
- 大小:992.00 KB
- 文档页数:26

第24届湖北省青少年科技创新大赛机器人竞赛规则第一章概述一、竞赛的性质湖北省青少年科技创新大赛机器人项目以培养青少年的创新意识和实践能力,提高青少年的科学素质为目的,是一项将知识积累、技能培养、探究性学习融为一体,面向广大青少年机器人爱好者的科学普及性活动。
二、组织机构主办单位:湖北省科协、湖北省教育厅、湖北省科技厅承办单位:湖北省青少年科技中心工作网站:湖北省青少年科技创新活动服务平台()。
竞赛的有关文件、规则和各类项目申报书均在网站上发布,供各地下载使用。
三、竞赛时间时间:2008年 4-5月四、竞赛内容1、中夏机器人普及赛:①小学组:机器人接力赛;②初中组:和平鸽比赛;③高中组:分辨黑白球比赛;2、爱乐博机器人特色比赛:①机器人轨迹赛;②机器人不编程轨迹赛;3、机器人提高赛;4、机器人足球比赛;5、机器人创意比赛;6、机器人工程挑战比赛;①FLL机器人工程挑战比赛;②VEX机器人工程挑战比赛。
五、竞赛参赛对象及组团方式凡2009年在校就读的中小学生(包括中专、中技、中师、中职),均可参加本届竞赛。
本届竞赛规定的各项目,除机器人特色项目外一律按小学、初中、高中三个组别参赛,不允许跨组别。
各代表队由领队、教练各1人及参赛队员组成,参赛队员的组队人数详见各项目细则。
六、奖励1、竞赛活动优胜选手及组织者由主办单位进行表彰和奖励。
2、大赛接受有关企业和社会机构设立的专项奖励。
根据专项奖设立原则,评选出专项奖获奖人员,予以奖励。
3、本届竞赛将从获得机器人基本技能比赛、机器人足球比赛、机器人创意比赛、FLL机器人工程挑战比赛、VEX机器人工程挑战比赛5项竞赛中选拔各组别的优秀代表队,组成湖北省代表团参加中国青少年机器人竞赛。
4、若有个别项目组队数低于10个队,大赛将设表演奖而不设竞赛奖。
第二章基本规则一、第24届湖北省青少年科技创新大赛机器人项目竞赛的“中夏机器人普及赛”、“爱乐博机器人特色赛”、“机器人提高赛”、“机器人工程挑战比赛”等4项赛事每个代表队比赛两轮,取最佳成绩;“机器人足球比赛”每个代表队抽签分组、采取淘汰赛的方式进行;“机器人创意比赛”采取评委现场问辩评审的方式进行。
ABU ROBOCON 2013 国内选拔活动主题与规则绿化星球教育部机械学科教学指导委员会教育部计算机科学与技术教学指导委员会2012年8月ABU ROBOCON 2013 安全指南前言安全是机器人竞赛未来持续发展的最重要问题。
因此,每位参赛者有义务安全地研制机器人。
除伦理道德方面的问题外,保持工作场所的安全性减少了机器人研制的延误,在出现意外的情况下保证了按计划完成机器人的制作。
由于工作人员受伤、研究发生事故的原因、采取防护措施,事故可能导致计划的中止或延误。
ABU Robocon 2013 的每位参赛者必须遵照竞赛委员会提供的规则中“安全的重要性”一节的规定,在充分采取安全措施的情况下构建机器人。
遵守规章制度Robocon 的每位参赛者构建机器人时必须研究相关的规定、参赛者学校制定的“安全与健康导则”。
参赛者必须在指导教师的监督下安全地研发、构建和操作机器人。
比赛时,必须考虑对工作人员和场馆内观众的安全性。
安全措施由于机器人操作手的操作错误、控制系统的轻率运行、部件的损坏,机器人可能停止、加速或突然转向,使操作手与机器人的尖锐部件或结构的切削面碰撞、接触、被可动部件(如齿轮)夹住或压坏周边环境。
除下面的实例外,请采取必要的安全措施。
建议采取的措施(举例)1.作为结构上的措施,应考虑掩盖尖锐部件、给可动部件加防护盖。
2.作为个人防护措施,应考虑戴头盔、护目镜,穿戴不易被机器人夹住的手套和服装。
3.作为操作上的措施,应考虑配置除操作手外能使机器人急停的应急人员, 避免单独练习以便有人对事故作出应急响应,进行各种检查,反复检查练习环境,保持工作场所的清洁,等等。
由于机器人的设计错误、反复拆装、电路过流、电池短路可能引发事故,除下面的实例外,请采取必要的安全措施。
建议采取的措施(举例)1.作为结构上的措施,应考虑反复检查保险丝、布线、连接位置以及与易燃物的隔离,等等。
2.作为操作上的措施,应考虑禁止不必要的反复拆装、使用合格的电池充电器,等等。
世界教育机器人大赛(WER )1、简介WER 是世界教育机器人大赛(World Educational Robot Contest)的缩写,该赛事由"世界教育机器人协会"(Federation of World Educational Robot)发起并主办。
WER是一项针对6-18岁青少年的国际性机器人比赛,每年全球有超过20多个国家的30万名选手参加各级WER选拔赛。
2、创始人美国三一学院教授,教育机器人学创始人之一,1994年创办了全球最早的机器人比赛——全球家用机器人灭火比赛;2013年创办了世界教育机器人大赛(WER),志在全球范围内普及以教育机器人为平台的科技教育。
现在,他还是康乃狄克州机器人学会的外联主任,康乃狄克州机器人学会是杰克[1]创办并有着31年历史的机构,该机构一直推动着各学校的机器人创新发明比赛。
3、内容与形式大赛主题:世界教育机器人协会将每年提出不同的、极具意义的比赛专题。
比赛形式:选手们组建2-10人的团队,创意搭建一系列机器人,完成规则内指定的任务。
4、WER历史2007年,在美国举办的国际机器人灭火比赛中引入了奥林匹亚知识竞答,2009年,国际机器人灭火比赛又引入了家庭服务机器人比赛,这是WER的试验之一。
从2007年开始,中国多地在机器人比赛中采用现场命题、现场动手完成比赛的方式,尝试开展全新的机器人比赛形式,每年积累超过3000支队伍参赛,经过2007-2012年的6年的实践,WER模式成型。
2012年,WER在清华大学建立了机器人比赛规则研究中心,开始全面研究新赛制及其教育价值。
2012年WER全球总部发布2013年基本比赛规则,2013年的主题“智能机器人管家”,2014年的主题"史前时代"。

2013年亚太机器人大赛规则快速向导:☆每场比赛时间为3分钟☆每队2个机器人+1个自动机器人+1个手动机器人☆手动机器人从叶子区取叶子,并把它放置在规定的3个摆放区☆然后,手动机器人从叶子区取叶子并将其运到自动机器人处☆自动机器人在北半球至少放3个叶子(自己的区域至少放2个,公共区至少放1个),然后自动机器人被允许去取北极区的植物☆自动机器人到北极区取植物(由队伍自己制作)并把他运送给手动机器人。
☆手动机器人在第二条限制线后,将植物扔向月球。
如果队伍植物到达月球而且没掉下来,那么此队伍完成“绿色星球”并且获胜。
1.队伍成员1.1来自同一所大学的每个队伍由4名队员( 三名学生,一名指导员)。
但是只有三名学生允许进入比赛场地1.2国际赛上,队员必须是本校在校学生。
除非那些在国内赛时是在校学生的队员,后离校的。
1.3研究生不允许以任何方式参与到机器人的制作中2、比赛场地和物品2.1比赛场地是13000mm X 13000mm的被铁围墙(100mm高50mm厚)包围的乳胶漆胶合板。
场地被沿着本初子午线的铁围墙平均分成两半。
2.2比赛场地被分成2部分如下:2.2.1地球区域(详见附录)2.2.1.1.地球区域是圆形,直径8500mm。
由30mm宽的马特贴纸(不反光)制作的白色引导线作为经线和纬线。
2.2.1.2.地球区域中画一个绿色大树2.2.1.3.在每个队伍的地球区域有7个钢制圈(在涂有深绿色的部位)用于放置叶子。
每个圈的规格是:50mm高,25mm厚,直径350mm。
在公共区域的圈内部分表面涂成黄色。
其它圈所在部分表涂成白色(详见图)2.2.1.4 北半球区域(详见图中)是地球区域上半部分。
北半球区域中间的四部分区域是公共区。
也有第一次平行在北极区域,在此区域每一队在比赛开始之前安放他们的植物幼苗。
(详见图中)。
2.2.1.5南极区域是地球区域下半区域。
2.2.2 宇宙区域在地球区域周围(详见附录)。

搬运说明书(1)搬运说明书1.引言1.1 目的本文档旨在为用户提供关于搬运的详细说明,包括的功能、操作指南以及安全注意事项等信息,帮助用户正确地使用搬运。
1.2 读者对象本文档适用于所有使用搬运的操作人员和维护人员。
2.搬运概览2.1 描述搬运是一种自动化设备,用于在工业环境中进行物品的搬运和运输。
2.2 特点●高精度定位和导航能力●多种传感器的集成,提供环境感知能力●灵活的机械臂和抓取装置,适用于各种物品类型●可编程的任务执行能力3.功能3.1 导航搬运通过激光导航系统实现自主定位和导航功能,能够在环境中自动避开障碍物,并规划出最优路径进行搬运任务。
3.2 搬运任务配备了灵活的机械臂和抓取装置,可以根据不同的搬运需求进行物品的抓取、搬运和放置,支持各种常见尺寸和重量的物品搬运任务。
3.3 任务编程与调度用户可以使用编程软件对进行任务编程和调度,设置任务的起始点、目标点以及搬运路径等参数,实现的自动化搬运任务。
4.操作指南4.1 启动和关闭使用之前,请确保处于安全状态。
按下启动按钮,将进入启动状态;长按关闭按钮,将进入关闭状态。
4.2 导航操作使用之前,请将工作环境中的障碍物清除,以确保的正常导航。
使用操控面板上的导航按钮,将自动进行定位和导航,并按照预设路径进行搬运任务。
4.3 搬运操作使用搬运物品时,请注意以下事项:●确保物品已经合理放置在的抓取装置上。
●在搬运过程中,禁止人员站在的搬运路径上,避免发生意外伤害。
●当搬运任务完成后,请将物品轻轻放置在指定位置,避免造成损坏。
5.安全注意事项5.1 安全操作●请勿将手指、头部等身体部位靠近的机械臂,避免发生意外夹伤。
●禁止未经授权人员私自操作。
5.2 维护●在进行维护时,请先关闭电源,以确保维修人员的安全。
●定期检查的各个部件和传感器的工作状态,并按照维护手册进行维护保养工作。
本文档涉及附件:无本文所涉及的法律名词及注释:●机械臂:指搬运上用于搬运物品的可移动机械装置。
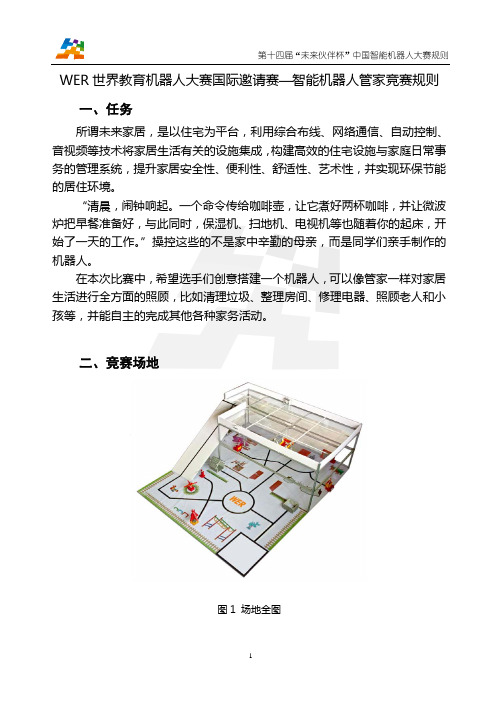
WER世界教育机器人大赛国际邀请赛—智能机器人管家竞赛规则一、任务所谓未来家居,是以住宅为平台,利用综合布线、网络通信、自动控制、音视频等技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日常事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。
“清晨,闹钟响起。
一个命令传给咖啡壶,让它煮好两杯咖啡,并让微波炉把早餐准备好,与此同时,保湿机、扫地机、电视机等也随着你的起床,开始了一天的工作。
”操控这些的不是家中辛勤的母亲,而是同学们亲手制作的机器人。
在本次比赛中,希望选手们创意搭建一个机器人,可以像管家一样对家居生活进行全方面的照顾,比如清理垃圾、整理房间、修理电器、照顾老人和小孩等,并能自主的完成其他各种家务活动。
二、竞赛场地图1 场地全图1.房屋框架图2 场地框架图如图2所示,房屋框架是由型材和板材搭建而成,分为四部分:院子、底楼、楼梯和二楼。
底层红线(实际比赛场地中不存在红线)划分了院子和底楼,上层为二楼,底层和上层之间有楼梯相连。
图3 底楼和院子示意图如图3所示,场地框架搭建好后,底层铺设喷绘纸(实际比赛场地中没有红色字标注),上面有2cm宽的黑线和一些任务模型的摆放位置标记。
底楼室内中心的十字路口(E处)上方是“吊灯”模型,“吊灯”是固定在天花板上的。
A处和B处会放置“垃圾袋”和“窗户”,C处和D处会放置“树”和“花园喷淋开关”,具体放哪一种在比赛现场决定。
图4 二楼示意图如图4所示,二楼的地板是透明的,上面已经粘贴好2cm宽白线和任务模型的摆放位置标记。
F处、G处和H处会放置“洗衣机”“晾衣架”和“摇篮”,具体放哪一种在比赛现场决定。
楼梯为一个30度斜坡,宽度为40cm,白底,中心有2cm宽黑线。
在机器人整个比赛运行过程中,其垂直投影始终需要在一楼和楼梯的黑色轨迹线或二楼的白色轨迹线上。
2. 场地内模型场地器材中包含一些零散件,它们可以搭建成任务模型,需要组装好后放在场地内标记好的位置上,任务模型的简要介绍见下表:犬舍:底部固定在花园地面指定位置,开口始终指向黑线 骨头模型:比赛时裁判发放。
“RTEC”机器人创意闯关竞赛规则一、竞赛目的1、可藉此进一步培育青少年在科学基础知识、机械、电子方面的创意思维,增加他们对物理、能量转换、再生能源及机械电子设计的认识与应用,增强团队合作意识。
2、参赛队伍以积木零件、各类生活用品搭建不同的关卡,并把智能机器人自动化设计巧妙的加入其中,展开研究和动手设计及搭建机关组件的神奇旅程,尝试应用不同的力学及智能、机械原理在关卡设计上。
3、RTEC释义:“R” ROBOT机器人“T”Thought思想;想法“E” E ducate训练、培养“C” Cooperate 合作互助二、竞赛组别小学组、初中组、高中组。
三、竞赛报名1、每支参赛队的参赛人数为不多于4名学生和1名教练员(教师或家长)。
2、学生必须是截止到2013年5月底前仍然在校的学生。
四、竞赛评审1、评审原则:作品采取现场制作现场评分2、制作时长:3个小时。
3、作品限制:限制面积为180CMx 60CM(长x宽),高度不限,但作品需稳固陈列于会场提供的展示桌上。
4、关卡数量:小学组需设立五个关卡以上,初中和高中组需设立七个关卡以上。
关卡需包含智能关卡、科学原理关卡、绿色能源关卡、地方特色关卡。
(1)智能关卡(机器人技术应用)机器人技术应用是指在作品中应用机器人技术实现关卡的动作或传递,从而提高参赛作品的智能化及自动化程度。
在作品的制作过程中,必须至少有三个关卡使用了机器人技术。
1.1部件要求从硬件上来说,机器人技术所应用的必须部件为控制器(如单片机、主板),此外还可以包括、但不局限于以下部件:1、传感器(如红外传感器)2、执行器(如直流电机、舵机)3、传动件(如齿轮)不同关卡之间可以共享一个控制器,也可以使用各自独立的控制器。
从非硬件方面来说,机器人技术是指机器人的控制思想、方法及原理,以及实现这些技术的程序及控制软件。
1.2应用方式机器人技术的应用分为两种方式:直接式和分散式。
直接式是指在关卡中直接应用机器人个体,如智能车、仿生六足机器人、人形机器人;间接式是指在关卡中将机器人关键部件通过有效的整合,形成一个能够智能或自动完成某些作业任务的功能物件。
2013中国机器人大赛暨RoboCup公开赛汇报总结学校:上海理工大学队伍名称:先锋二队参赛队员:高鸿飞张波赵统帅浩天指导老师:王飞徐志林报告人:张波时间:2013年10月目录第一章赛事介绍------------------------------2第二章参赛项目介绍--------------------------3第三章机器人比赛应用软件介绍----------------5第四章机器人个硬件模块介绍------------------6第五章比赛经验总结和心得体会----------------8第一章赛事介绍-中国机器人大赛暨RoboCup公开赛(以下简称“机器人大赛”)是我国最具影响力、最具权威性的机器人技术大赛,每年举办一届,已分别在苏州、兰州等城市成功举办了十三届。
今年在安徽建筑大学举办。
机器人竞赛是近年来国际上迅速开展起来的一种高技术对抗活动,它涉及人工智能、智能控制、机器人、通讯、传感及机构等多个领域的前沿研究和技术融合。
它集高技术、娱乐和比赛于一体,引起了社会的广泛关注和极大兴趣。
今年共有112项机器人比赛,我们参加的竞赛项目是光电搬运组。
第二章参赛项目介绍比赛目的:设计一个小型轮式或人形机器人,模拟工业自动化过程中自动化物流系统的作业过程。
机器人在比赛场地内移动,将不同颜色、形状或者材质的料块分类搬运到设定的目标区域。
比赛记分根据机器人将物体放置的位置精度和完成时间来决定分值的高低比赛内容及任务1.轮式光电组。
2在规定时间内,机器人从出发区出发,完成物料的分拣搬运,回到出发点。
3.轮式摄像头组、轮式光电组、人形摄像头组和青少年组:使用比赛场地(Ⅰ)。
从放在暗盒中的颜色分别为黄、白、红、黑、蓝 5 个料块中抽取 3 个料块,依照抽出顺序依次摆放在 A、C、E 位置。
机器人从出发区出发,将料块搬运到对应颜色的目标区,然后回到出发区。
4.标准平台组:使用比赛场地(Ⅱ)。
裁判现场随机将 18 个三色料块平铺放置在物料区内。
机器人课程实验指导书实验一机器人程序设计基础的练习实验目的:1. 熟悉机器人仿真平台的组成、系统参数设置。
2. 掌握机器人仿真平台的简单程序设计。
3. 学会实体机器人程序的设计与调试方法。
实验内容:1. 机器人仿真平台的系统参数设置。
2. 机器人仿真平台的简单程序设计。
3. 实体机器人程序的设计与调试方法。
实验设备:安装VJC机器人仿真平台的PC机,能力风暴机器人AS-UII。
实验学时:6学时实验类型:验证性实验指导教材:《VJC1.5仿真版使用教程》. 上海未来伙伴机器人有限公司. 2008《VJC1.5开发版使用教程》. 上海未来伙伴机器人有限公司. 2008《能力风暴机器人AS-UII使用手册》. 上海未来伙伴机器人有限公司. 2008实验步骤:(2个学生合作完成本次实验的内容,并写出实验报告)一、虚拟机器人程序设计。
在VJC机器人仿真平台中完成以下的设计任务。
1、编写一个机器人,使其能够沿着彩线从左端走到右端。
(使用场景广茂达仿真场地/沿线走场地.ini)2、编写一个机器人,使其能够根据声音的强度,产生0~2之间的随机数,并跳到相应的格子中。
(使用场景广茂达仿真场地/跳格子.ini)3、编写一个机器人,使其能够避开障碍从一端走到另一端。
(使用场景广茂达仿真场地/越障跑.ini)二、实体机器人程序设计。
使用能力风暴机器人AS-UII完成以下的设计任务。
1、参照《能力风暴机器人AS-UII使用手册》,完成能力风暴机器人AS-UII的自检过程。
2、参照《能力风暴机器人AS-UII使用手册》,将能力风暴机器人AS-UII跟计算机连接,并练习如何下载程序到机器人的控制器。
3、编写一个机器人程序,控制机器人能够在行进的过程中避开障碍物。
(分别用“红外传感器”和“碰撞传感器”完成该程序。
)4、编写一个机器人程序,控制机器人能够转过90度角。
(使用“光电编码器”完成该程序。
)5、机器人接力赛。
该项目由两个小组共同完成。
智能快递比赛规则一、智能快递机器人比赛背景随着现代电商业越来越发达,网上购物已经实现了爆发式的增长,进而刺激着快递行业的发展。
“十三五”乃至未来更长时期,中国物流产业将进入更高层次的发展阶段,并呈现一些新的发展趋势与特征。
伴随着国民经济的快速稳定发展,物流产业规模将继续快速扩张;与经济结构和产业布局调整相适应,物流产业的集中度将进一步提升;随着物流市场的不断扩大,物流产业内的分工将越来越细;物流产业发展的制度环境将日趋规范,市场秩序与环境条件也将进一步优化。
由此引发我们的快递安全问题也越来越突出,必须予以重视。
二、比赛主题竞赛选手在竞赛场室,单人为一组,独立地通过编写、调试程序,使快递车(虚拟机器人)在指定时间内从起点行驶到指定的车站抓取“邮包”,然后送回到指定地点完成整个任务(任务包括:沿道路行驶,躲过道路上的障碍物,去到指定的(一个或多个)车站抓取“邮包”,回到设在场地内的终点(半透明状圆柱体)。
选手组装好模型,编写调试好程序后,就可以将模型及程序上传到服务器,最后由裁判统一进行现场演示评判,并由最终的分数相加决定选手的竞赛名次。
比赛时间90分钟,任务由选手独立完成,要求从起点出发,规划最佳路线,接收沿线路上的快递,最后安全到达终点。
选手的接收快递分数和时间分数相加,即为该队的总分。
虚拟机器人碰到障碍物、建筑物等物体会扣除相应的分数,撞到路上的行人造成交通事故,系统会马上直接自动结束比赛并扣除相应的分数。
每个快递只允许接收一次,接完之后会自动消失。
选手需严格按照分配的座位号对号入座,按照分配好的起点位置编写程序,独立完成,确定自己的行走路线及所接取的快递。
三、比赛场地与环境(一)场地示意图(参见图1)(一)虚拟城市场景,有各种虚拟的建筑物、广告牌、道路、绿化带、树木等,如图1。
图1 虚拟城市场景场景中的道路包括多种转弯角度,十字路口和丁字路口等,如图2、图3和图4。
图2 转弯道路图3 丁字路口图4 十字路口(二)机器人比赛场地规格与要求:1.赛场(一)虚拟城市场景中的建筑物、障碍物、车辆、路障栏等物体被机器人撞击时会发生碰撞效果,对快递机器人的行驶产生影响,并会被竖起一面红旗以作自动标识,作为犯规的依据,如图5所示,当快递车碰撞路障后,会在快递车与路障的碰撞中心点竖起一面红旗以作标记。
2013中国教育机器人大赛 智能搬运竞赛演示程序说明
深圳市中科鸥鹏智能科技有限公司 2013年7月 目录 第一章 智能搬运比赛简介 ........................................... 3 1.1 比赛任务介绍 ............................................... 3 第二章 组装智能搬运机器人 ......................................... 4 2.1 智能搬运机器人零件 ......................................... 4 2.2 智能搬运机器人安装说明 ..................................... 4 第三章 超声波传感器测试说明 ....................................... 7 3.1 超声波传感器技术参数介绍 ................................... 7 3.2 超声波测试程序 ............................................. 8 第四章 QTI线跟踪传感器测试说明 .................................. 10 4.1 QTI传感器技术参数介绍 ................................... 10 4.2 QTI传感器测试程序......................................... 10 第五章 智能搬运算法说明及程序...................................... 12 5.1 智能搬运算法说明 .......................................... 12 5.2 智能搬运程序 .............................................. 13 第一章 智能搬运比赛简介 智能搬运是“中国教育机器人比赛”的一个比赛项目,智能搬运比赛是基于8位单片机的小型机器人比赛项目。在比赛场地里移动,并将不同颜色的色块分类搬运到对应的位置。比赛的记分根据机器人搬运物体安置位置的精度和完成任务时间来决定分值的高低。该比赛模拟了工业自动化过程中自动化物流系统的实际工作过程,使参赛队员在实践中了解自动化物流系统的制作过程。 1.1 比赛任务介绍
图1.1 智能搬运场地图 如图1.1所示绿色区域为智能搬运场地的出发区。机器人从出发区出发,到达物料储存区后,分拣其赛前1小时抽签决定好的任务,即先从5个预知颜色色块(黄、白、红、黑、蓝)按照顺序抽取4个颜色色块分别依次放到A,B,D,E位置,然后将剩下的1个色块通过抽签放到F、G、H和I中的一个位置。在1小时内修改和调整程序,控制机器人运动,以便将5个颜色色块准确地搬运到对应的5个颜色中心区域内,最后回到出发区。 第二章 组装智能搬运机器人 2.1 智能搬运机器人零件 宝贝车车体 一套 搬运手爪 一个 超声波传感器 一个 QTI线跟踪套件 四个 C51+AVR教学板 一个 导线和连接线 若干 螺钉、螺母、铜柱和固定架 若干 5-8V电源 一个 以下为部分智能搬运机器人零件的实物图。
图2.1 宝贝车车体图 图2.2搬运手爪图 图2.3 C51+AVR教学板图
图2.4 QTI线跟踪套件图 图2.5超声波传感器图 2.2 智能搬运机器人安装说明 参照《基础机器人制作与编程》文档第29至32页的要求组装宝贝车和C51+AVR教学板(注:该文档的宝贝车上装BASIC Stamp 微控制器,将BASIC Stamp 微控制器换成C51+AVR教学板即可,安装要求教学板上的面包板在车体前方。)。以下用表格描述各传感器与教学板的电路连接方式。 表2.1 电机、QTI线跟踪套件、超声波传感器与C51教学板的电路连接 设备名称 设备端口 C51教学板端口
右电机 白线 P10 红线 Vin 黑线 GND
左电机 白线 P11 红线 Vin 黑线 GND QTI1 SIG P00 QTI2 SIG P01 QTI3 SIG P02 QTI4 SIG P03
超声波传感器 Trlg P20 Echo P21 VCC 5V GND GND 表格补充说明,以宝贝车的车体前方为正方向,则对应的左右两边为左右电机,如图2.6所示。4个QTI线跟踪传感器的命名顺序是从右边第一个开始为QTI1,第二个为QTI2,第三个为QTI3,第四个为QTI4。
图2.6 智能小车左右电机标明图 按照上面描述的安装方法完成智能小车安装,安装完成的小车效果图,如图2.7、图2.8、图2.9所示。
图2.7 智能小车安装效果俯视图 图2.8 智能小车安装效果正面图 图2.9 智能小车安装效果小车下方图 第三章 超声波传感器测试说明 3.1 超声波传感器技术参数介绍 DM-S28018-B超声波提供了精确的、非接触式的距离测量,测量范围从2cm到5m,它非常方便的与单片机连接,只需要两个IO口就可以控制。 (1) 使用方法为: a) 采用IO触发测距,给TRIG至少10us的高电平信号。 b) 模块自动发送8个40KHz的方波,自动检测是否有信号返回。 c) 有信号通过ECHO返回,ECHO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。 (2) 产品特性: a) 使用电压:DC 5V; b) 静态电流:小于2mA; c) 电平输出:高电平VCC>0.2V,低电平<0.2V; d) 感应角度:不大于15度; e) 探测距离:0.02m-5m; f) 探测精度:3mm 。 (3) 电气参数: a) 工作电压:DC 5V; b) 工作电流:10mA; c) 工作频率:40Hz; d) 最远射程:5m; e) 最近射程:2cm; f) 输入触发信号:10uS的TTL脉冲; g) 输出回响信号:输出TTL电平信号,与射程成比例; h) 规格尺寸:43*20*15mm 。 (4) 管脚定义 表3.1 管脚定义 引脚 引脚说明 引脚 引脚说明 VCC 电压 +5V out 空脚 trig 触发信号端 GND GND Echo 接收端 (5) 模块时序图 图3.1 模块时序图 (6) 使用时注意事项 测量距离是注意事项: a) 在测量距离超过3.3m时,测量误差会增大,可能使得测量距离不是准确等。 b) 如果超声波传感器与障碍物的倾角大雨45度使得没有接受信号等。 c) 测量物体大小,可能无法测量真实值。 环境温度带来的影响:如果考虑较高的精度,就不能忽略温度的影响,下面将给出具体计算超声波传输速度公式。
smTCcair/)6.0(5.331 (式1) 3.2 超声波测试程序 假设测试程序的定时器计数值(high + low),则该值除于58就是转换为cm为单位的测量距离。超声波传感器和C51教学板的连接方式与表2.1相同。 #include #include #include #include
#define TrigL P2_0 //左超声波触发信号 #define EchoL P2_1 //左超声波echo引脚信号
#define uchar unsigned char #define uint unsigned int
uchar timer_cnt=0; // 记录进定时器中断次数 uint sonar_used_time=0; // 定时器初始化 void InitTimer(void) { TMOD |= 0x01; TH0 = 0x0; TL0 = 0x0; EA = 1; ET0 = 1; TR0 = 0; } // 定时器0溢出中断 void Interrupt(void) interrupt 1 { TR0 = 0; }
// 测距函数 //返回值:返回测量得的距离值 uint GetSonarDis(void) { uint dis=0; uint high, low; TrigL=0;EchoL=0; //各I/O口置低
TrigL=1; //trig置高 发出10us的高电平信号 delay_nus(25); TrigL=0; while(EchoL == 0); TR0=1; //开启定时器开始计时 while(EchoL == 1 && TR0 == 1); //等待echo置低 TR0 = 0; high = TH0 * 256; low = TL0; dis = (high + low) / 58;
return dis; }
void main() { uint m; uart_Init(); while(1) { InitTimer(); //定时器初始化 m=GetSonarDis(); printf("ultrasonic = %d\n",m); delay_nms(1000); } }