三维图像识别
- 格式:pdf
- 大小:1.87 MB
- 文档页数:53
三维表征方法
标题:三维表征方法的理解与应用
一、引言
在计算机科学和机器学习领域,数据的表示和理解是关键。
三维表征方法是一种重要的数据表示方式,它能够更好地模拟现实世界中的物体和场景。
这种表示方式可以应用于各种任务,包括图像识别、视频分析、虚拟现实等。
二、三维表征方法的基本原理
三维表征方法主要是通过将物体或场景的形状、大小、位置等信息转化为三维模型来实现的。
这个过程通常需要大量的计算资源和复杂的算法。
常见的三维表征方法有立体视觉、深度学习、点云表示等。
三、三维表征方法的应用
1. 图像识别:通过构建三维模型,可以更准确地识别图像中的物体和场景。
例如,在自动驾驶中,可以通过三维表征方法来识别道路上的障碍物。
2. 视频分析:三维表征方法可以用于视频中的动作识别和追踪。
例如,在体育比赛中,可以通过三维表征方法来追踪运动员的动作。
3. 虚拟现实:三维表征方法是虚拟现实技术的基础。
通过构建逼真的三维模型,可以使用户感到身临其境。
四、三维表征方法的挑战与未来趋势
虽然三维表征方法在很多方面都取得了显著的成果,但仍面临许多挑战。
例如,如何有效地处理大规模的数据,如何提高模型的精度和效率,如何更好地理解和模拟真实世界的复杂性等。
在未来,随着硬件和算法的进步,我们期望看到更多的创新和突破。
五、结论
三维表征方法是一种强大的工具,它可以帮助我们更好地理解和模拟现实世界。
然而,要充分发挥其潜力,还需要我们不断探索和创新。
openpose 3d识别原理openpose 3D是一种3D姿势估计框架,它可以从RGB-D摄像机的输入中推测出人体的三维姿态。
openpose 3D是开源的,可在Windows,Linux和macOS上运行。
它基于深度学习技术,利用卷积神经网络实现姿势估计。
本文将介绍openpose 3D的原理。
openpose 3D采用的主要技术是多人三维姿态估计(Multi-Person 3D Pose Estimation, MP3D),主要使用卷积神经网络(CNN)和渲染器(Renderer)两个组件。
CNN卷积神经网络是在深度学习领域中广泛使用的一种神经网络类型。
在openpose 3D中,CNN用于对RGB-D视频输入进行特征提取和分类。
CNN在网络中执行一系列卷积、池化和全连接操作,提取出视频序列中的特征。
尤其是在处理RGB图像时,CNN的卷积操作可以有效地捕捉特征,如颜色、纹理等。
而对于深度图像,CNN可以提取深度信息,如每个点的距离和深度变化。
对于每个视频帧,openpose 3D的CNN将像素值转换为特征图,并在多个卷积层之间传递这些特征。
经过卷积和池化后,这些特征将被展平为一维向量,然后输入全连接层进行分类。
在openpose 3D中,分类的任务是预测每个关节点(如头、手、脚等)的三维位置。
Renderer渲染器是openpose 3D的第二个组件,它根据CNN的输出将渲染好的三维模型与输入视频进行对齐。
这个过程涉及到几何变换和最小二乘优化。
在几何变换中,渲染器用CNN预测的关节点位置来更新3D模型的形状和姿势。
这个过程涉及到平移、旋转和缩放等变换,以匹配输入视频中人体的姿势。
最小二乘优化则是通过最小化真实关节点与渲染关节点之间的误差来优化渲染过程。
这个过程中需要确定哪些关节点是正确的,并且它们和真实关节点的距离应该最小化。
通过这个过程,可以调整姿势估计和几何变换中的参数,以进一步提高姿势估计的准确性。
医学图像处理中的三维可视化技巧医学图像处理是医学影像学领域中的关键技术之一。
它通过对医学图像进行处理和分析,提取有用的信息,并帮助医生进行疾病诊断和治疗规划。
在医学图像处理中,三维可视化技巧是一种重要的工具和方法,它能够将医学图像转化为直观的三维图像,使医生能够更全面地理解和分析病变情况,并提供更精确的诊断依据。
三维可视化技巧在医学图像处理中的应用非常广泛。
下面将介绍几种常用的三维可视化技巧及其在医学图像处理中的作用和优势。
1. 体绘制技术体绘制技术主要通过对医学图像中的密度信息进行处理,将图像转化为类似于实物体的三维表达形式。
该技术可以根据密度变化将不同组织或器官的边界显示出来,使医生能够更直观地观察病变的位置、大小和形态。
通过调整透明度和颜色映射等参数,还可以进一步提取和突出显示感兴趣的结构,方便医生进行详细的观察和分析。
2. 曲面重建技术曲面重建技术利用医学图像中的边缘信息,将图像中的二维曲线转化为三维的曲面结构。
通过对曲面的调整和优化,可以使得曲面更加光滑和真实,进一步提升医生对病变的观察能力。
曲面重建技术在疾病诊断和手术规划中具有重要的应用价值,能够为医生提供更精确的解剖结构信息,辅助他们做出更可靠的决策。
3. 面绘制技术面绘制技术是一种将医学图像中的二维轮廓转化为三维表面的方法。
通过对轮廓的描绘和填充,可以使得医生更清晰地观察到病变的边缘和形态。
面绘制技术不仅可以提高医生对疾病的识别能力,还可以为手术规划和治疗方案的设计提供有益的参考。
4. 虚拟内镜技术虚拟内镜技术是指利用计算机生成的虚拟内镜,在医学图像上进行视角移动和放大,模拟实际内镜检查的过程。
这种技术可以帮助医生更好地观察和分析图像,发现微小病变和病灶,并提供更准确的诊断结果。
虚拟内镜技术的应用使得疾病的早期诊断成为可能,提高了治疗的成功率和效果。
综上所述,三维可视化技巧在医学图像处理中扮演着重要的角色,可以提供直观、准确和全面的医学图像信息。
三维目标检测三维目标检测是计算机视觉领域的一个重要研究方向,其主要目的是通过分析图像和点云数据,检测和识别三维环境中的物体。
与传统的二维目标检测相比,三维目标检测需要额外考虑物体在空间中的位置和姿态,具有更高的难度和复杂性。
三维目标检测的应用范围广泛,包括自动驾驶、机器人导航、虚拟现实等领域。
其中,在自动驾驶领域,三维目标检测可以帮助车辆感知周围的障碍物和行人,从而避免事故发生,提高交通安全性。
在三维目标检测中,常用的数据来源包括图像和点云。
图像是最常见且易于获取的数据类型,通过图像可以获取物体的外观特征。
而点云是由激光雷达等传感器获取的,可以提供物体的三维坐标信息。
将图像和点云相结合,可以得到更全面和准确的三维环境信息。
三维目标检测主要包括物体检测和物体识别两个步骤。
物体检测是指在三维场景中,通过使用检测器来定位和检测场景中的所有物体。
常用的物体检测方法包括基于深度学习的方法和基于传统算法的方法。
其中,基于深度学习的方法通常使用卷积神经网络(CNN)和循环神经网络(RNN)等网络结构,通过训练数据来学习物体的特征表示。
基于传统算法的方法通常使用特征提取和模型拟合等技术,通过提取物体的形状、纹理等特征来进行检测。
物体识别是指在检测到物体后,对其进行进一步的分类和识别。
常用的物体识别方法包括基于模型的方法和基于深度学习的方法。
基于模型的方法通过使用预定义的物体模型和特征匹配等技术,来进行物体识别。
基于深度学习的方法则通过训练数据来学习物体的特征表达能力,并通过使用卷积神经网络等网络结构来实现物体的识别。
三维目标检测的研究面临着许多挑战和困难。
首先,三维环境中的数据维度较高,并且存在着大量的噪声和不确定性。
其次,三维目标检测需要解决物体在空间中的遮挡、投影和尺度等问题。
此外,三维目标检测的计算复杂度较高,对计算资源的要求较高。
综上所述,三维目标检测是计算机视觉领域的一个重要研究方向,其可以帮助实现自动驾驶、机器人导航等应用。

mediapipe人体3d识别原理-回复MediaPipe是一个跨平台的开源框架,可以用于构建基于机器学习的应用程序,其中包括人体动作识别和姿态估计等任务。
其中,MediaPipe的人体3D识别功能可以通过使用深度学习模型来实现。
在这篇文章中,我们将逐步介绍MediaPipe人体3D识别的原理和实现方式。
一、人体3D识别的概述人体3D识别是指通过计算机视觉技术获取并识别人体的三维姿态信息。
它可以用于许多应用领域,例如人体动作捕捉、虚拟现实、增强现实等。
MediaPipe人体3D识别就是利用深度学习模型,从视频或图像序列中提取人体的三维姿态信息。
二、MediaPipe的工作流程1. 输入:MediaPipe接受的输入可以是视频或图像序列。
在输入序列中,人体会随着时间的推移发生动作或移动。
这些视觉数据将作为MediaPipe 人体3D识别的输入。
2. 人体检测:首先,MediaPipe使用一个人体检测器来提取输入序列中的人体区域。
这可以通过现有的人体检测模型(如YOLO、SSD等)实现,也可以使用其他形式的目标检测算法。
3. 2D关节点提取:接下来,MediaPipe使用一个2D关节点提取器,从检测到的每个人体区域中提取出2D关节点。
这些关节点代表人体的关键点,例如头、肩膀、手肘、膝盖等。
2D关节点提取器可以是一个单独的神经网络,它会为每个人体区域生成一个关节点矩阵。
4. 2D姿态估计:MediaPipe将从2D关节点提取器中获取的关节点信息传递给2D姿态估计器。
2D姿态估计器使用一个深度学习模型,通过回归方法预测出人体的2D姿态。
5. 单视图重建:一旦获得了每个帧中的2D姿态,MediaPipe将使用单视图重建技术来估计每个2D姿态的3D姿态。
单视图重建利用了人体的几何结构信息和深度学习模型推断得出的2D关节点信息。
6. 3D姿态估计:最后,MediaPipe通过进一步分析和处理单视图重建的结果,得到每个时间步长的3D姿态,完成人体3D识别任务。
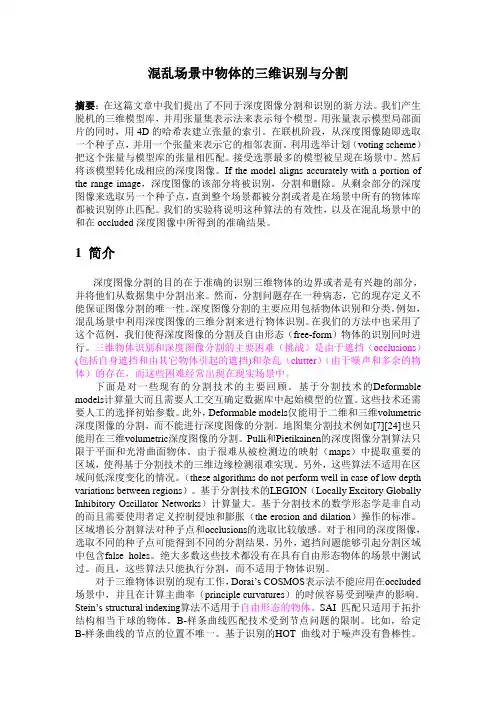
混乱场景中物体的三维识别与分割摘要:在这篇文章中我们提出了不同于深度图像分割和识别的新方法。
我们产生脱机的三维模型库,并用张量集表示法来表示每个模型。
用张量表示模型局部面片的同时,用4D的哈希表建立张量的索引。
在联机阶段,从深度图像随即选取一个种子点,并用一个张量来表示它的相邻表面。
利用选举计划(voting scheme)把这个张量与模型库的张量相匹配。
接受选票最多的模型被呈现在场景中。
然后将该模型转化成相应的深度图像。
If the model aligns accurately with a portion of the range image,深度图像的该部分将被识别,分割和删除。
从剩余部分的深度图像来选取另一个种子点,直到整个场景都被分割或者是在场景中所有的物体库都被识别停止匹配。
我们的实验将说明这种算法的有效性,以及在混乱场景中的和在occluded深度图像中所得到的准确结果。
1 简介深度图像分割的目的在于准确的识别三维物体的边界或者是有兴趣的部分,并将他们从数据集中分割出来。
然而,分割问题存在一种病态,它的现存定义不能保证图像分割的唯一性。
深度图像分割的主要应用包括物体识别和分类。
例如,混乱场景中利用深度图像的三维分割来进行物体识别。
在我们的方法中也采用了这个范例,我们使得深度图像的分割及自由形态(free-form)物体的识别同时进行。
三维物体识别和深度图像分割的主要困难(挑战)是由于遮挡(occlusions)(包括自身遮挡和由其它物体引起的遮挡)和杂乱(clutter)(由于噪声和多余的物体)的存在,而这些困难经常出现在现实场景中。
下面是对一些现有的分割技术的主要回顾。
基于分割技术的Deformable models计算量大而且需要人工交互确定数据库中起始模型的位置。
这些技术还需要人工的选择初始参数。
此外,Deformable models仅能用于二维和三维volumetric 深度图像的分割,而不能进行深度图像的分割。
光电子・激光第21卷第2期 2010年2月 Journal of Optoelectronics・Laser Vol.21No.2 Feb.2010利用深度和灰度图像实现三维目标的识别与分类3郝 麟,冯少彤,聂守平33(南京师范大学江苏省光电技术重点实验室,江苏南京210097)摘要:将深度图像和灰度图像相结合,对围绕定轴旋转的三维目标进行了识别与分类。
将深度图像作为相位因子,对其进行傅里叶变换,并用其制成三维定向图,用于三维目标的识别和旋转角度的判定;对于灰度图像,采用主分量分析(PCA)的方法,对训练图像进行特征分析。
根据深度图像测定的目标角度,对三维目标灰度图像在其所属特征空间进行分解与重构。
实验结果表明,综合利用深度图像和灰度图像,可以大大降低目标识别中的误判概率。
关键词:深度图像;灰度图像;相位傅里叶变换;三维定向图;主分量分析(PCA)中图分类号:O438 文献标识码:A 文章编号:100520086(2010)022*******T hree2dim ensional object recognition and classification using range and textu re im ageHAO Lin,FEN G Shao2tong,NIE Shou2ping33(Jiangsu Province K ey Laboratory for Opto2electronic T echnology,Nanjing Normal University,Nanjing210097,China)Abstract:The range image and the texture image are combined to recognize and classify the three2dimen2sional(3D)objects which rotate around the fixed axis.The range image is considered as a phase factor,and then the phase Fourier transform of the factor is used to build a3D object orientation map,which isused for3D objects identification and to detect the rotation angle;The texture images are processed byprincipal component analysis(PCA),and the feature vectors are selected.According to the detected an2gle,we choose the corresponding feature space to decompose and reconstruct the texture image of3D ob2ject.The results indicate that the proposed scheme can reduce the error rate of object recognition obvi2ously.K ey w ords:range image;texture image;phase Fourier transform;32D object orientation map;principalcomponent analysis(PCA)1 引 言 三维目标识别技术可以分为光电混合目标识别和计算机目标识别两大类。
三维测量原理
三维测量是通过采集空间中的三维坐标信息来确定物体形状、大小以及位置的过程。
它是利用测量仪器和技术对物体的三维特征进行精确测量和分析的方法。
三维测量的原理可以归纳为以下几个方面:
1. 引用点法:基于已知的参考坐标系或已知点的坐标,以此为基准来测量目标物体的三维坐标。
这种方法需要事先布置参考点或使用具有已知坐标的比较物体,通过测量目标点与参考点之间的距离和角度来确定目标点的三维坐标。
2. 投影法:通过投影几何的原理,将目标物体的三维坐标投影到二维平面上进行测量。
测量仪器通常会发出光束或激光线,通过与物体表面相交后的反射或散射,来测量物体表面上点的二维坐标。
然后通过多个点的测量结果,计算出物体点的三维坐标。
3. 视觉测量法:利用相机等视觉设备来捕捉物体的图像信息,并通过图像处理技术来获取物体的三维坐标。
这种方法通常需要使用一些标定物体或标志物来提供参考,以帮助计算机识别图像中各点的三维坐标。
4. 激光扫描法:利用激光测距仪或激光雷达等设备,发射激光束并接收其返回的反射信号,从而获取物体表面各点的三维坐标。
这种方法可以快速而准确地获取大量点的坐标数据,并可以实现对复杂曲面的测量。
以上是常见的三维测量原理,不同的测量任务可以选择适合的方法进行测量和分析。
通过三维测量,可以实现对物体的形状、尺寸和位置的准确描述,为工程设计、制造和质量控制等领域提供重要的数据支持。
变电站装配式施工中AR技术应用杨迎迎发布时间:2023-06-30T02:20:12.658Z 来源:《当代电力文化》2023年8期作者:杨迎迎[导读] 时代的发展让越来越多的科技被运用到变电站装配式施工中,AR技术便是其中的典型代表。
该技术贯穿于变电站施工的整个流程,包括可视化培训、施工方案模拟等,能够有效满足工程建设的标准化要求。
文章以变电站装配式施工作为研究对象,结合工程实践,指明AR技术在实践当中的运用价值,发挥AR技术发挥出该技术在工程质量、工程验收等方面的有效作用,为其他工程提供参考。
身份证号码:34222219930801xxxx 摘要:时代的发展让越来越多的科技被运用到变电站装配式施工中,AR技术便是其中的典型代表。
该技术贯穿于变电站施工的整个流程,包括可视化培训、施工方案模拟等,能够有效满足工程建设的标准化要求。
文章以变电站装配式施工作为研究对象,结合工程实践,指明AR技术在实践当中的运用价值,发挥AR技术发挥出该技术在工程质量、工程验收等方面的有效作用,为其他工程提供参考。
关键词:AR技术;变电站;装配式施工;三维图像;特征信息感知1.引言AR技术是在影像定位基础之上进行三维模型实时显示的现代技术,该技术实现了三维建模、多媒体、多传感器融合等不同技术手段之间的相互结合,能够给人以可感知的信息,在不同的场景都具有极大的运用价值。
该技术是对现实世界的反映,能够实现内容和真实场景之间的有效联系,构建双重叠加关系,以此来弥补现实技术和现实世界隔离的缺陷,增强用户的实践感知效果。
其工作流程如图1所示。
2基于变电站装配式施工的AR技术应用2.1AR施工可视化培训科技的发展让变电站项目更加复杂,原因在于该项目专业内容广泛、工艺繁杂、安全等级要求高,但是施工现场存在客观性的问题,例如,施工人员的技术文化水平参差不齐,缺乏统一的入场安全培训,专业技能教育培训落实不到位。
受到客观因素的影响,施工人员的培训学习效果并没有达到理想预期,如果能够将AR技术引入其中,便可实现可视化的培训,具体优势如下:1)实现同一性培训到个性化知识生成的过程转变,实现培训模式的变革。
三维立体视觉信息的提取一、问题背景 (1)一、实现方法 (1)1.图像的获取与预处理 (1)2.边缘信息提取 (2)3.边缘检测与轮廓连结 (3)4.利用线条分类识别三维物体 (4)二、从二维图像中提取三维特征的局限性 (6)一、问题背景机器视觉是机器人感知周围环境的主要途径之一。
所谓机器人视觉即:使机器人具有视觉感知功能的系统。
机器人视觉可以通过视觉传感器获取环境的二维图像,并通过视觉处理器进行分析和解释,进而转换为符号,让机器人能够辨识物体,并确定其位置。
为了判断一个物体在空间的位置和形状,机器人往往需要获取两类信息,即明暗信息和距离信息。
目前成熟的光电成像技术都只能捕获二维明暗信息,而不能获得距离信息,所以直接通过这种途径获得的机器视觉也只能是二维的。
随着科学技术的发展,三维立体视觉的解决方案也如雨后春笋般涌出,其中就包括双目立体视觉(多镜头法),狭缝光投影法,时间差法等,但是如果能够要通过对二维图像(准确地说是2.5维图像,即含有透视关系的二维图像)的特征进行提取,并进而得到三维信息的话,无疑可以大幅度降低系统的复杂度。
本文将论述一种从二维图像中提取三维信息的方法。
这种方法对二维图像的边缘进行识别的处理,通过边缘的连接模式判断出视野中物体的三维特征。
这种方式输出的输出结果是一种与物体的三维结构相对应的二维特征组,后续处理也较为方便。
一、实现方法1.图像的获取与预处理用于进行三维特征提取的图像是一幅常规的二维灰度图,所以使用一个常规的CCD或CMOS图像传感器即可满足要求。
图像需要进行量化处理,即把图像信息分成许多像素点,这些亮点经过A/D转换后即可输入计算机进行处理。
大多数情况下,图像传感器获得的图像并不完美,其中难免会出现暗点或亮点。
图像中的这些暗点和亮点统称“噪点”。
噪点不仅降低了图像的分辨率,还会对后期的特征提取等处理造成很大的干扰,甚至引起识别错误。
此外由于外界光线强度的变化,图像的亮度分布也时刻在变化,为了给形态学处理的图像提供统一的条件,计算机在把获得图像进行形态学处理前,必须先对其进行预处理。
三维检测的技术流程一、引言三维检测是一种应用广泛的技术,可以用于各种领域,包括工业制造、医学影像、建筑设计等。
本文将介绍三维检测的技术流程,让读者对其有一个清晰的了解。
二、数据采集三维检测的第一步是数据采集。
通常使用的方法有激光扫描、摄影测量和结构光扫描等。
激光扫描通过激光束扫描物体表面,获取其三维坐标信息。
摄影测量则是利用相机拍摄多张照片,通过三角测量原理计算物体的三维坐标。
结构光扫描则是利用投射特殊光源的光纹或光栅,通过图像处理技术提取物体表面的三维信息。
三、数据处理在数据采集后,需要对采集到的数据进行处理。
数据处理包括数据的清洗、对齐和配准等步骤。
清洗是指去除采集过程中可能存在的噪声和异常点。
对齐是将采集到的多个数据集进行配准,使其在同一坐标系下。
配准是指将采集到的数据与已知模型或标准进行对比,以便后续的分析和比较。
四、特征提取在数据处理完成后,需要对物体的特征进行提取。
特征提取是指从三维数据中提取出具有代表性的特征点或特征曲面。
常用的特征提取算法有SIFT、SURF和ORB等。
这些算法能够从大量的数据中提取出物体的关键特征,以便后续的识别和分析。
五、形状重建特征提取完成后,需要对物体的形状进行重建。
形状重建是将离散的特征点或特征曲面连接起来,形成物体的完整三维模型。
常用的形状重建算法有点云重建和曲面重建等。
点云重建是将特征点连接起来,形成物体的点云模型。
曲面重建则是在点云的基础上生成物体的曲面模型,使其更加光滑和真实。
六、数据分析形状重建完成后,可以对三维数据进行进一步的分析。
数据分析可以包括形状比较、尺寸测量、缺陷检测等。
形状比较是将重建得到的模型与标准模型进行比较,判断其是否符合要求。
尺寸测量是通过测量模型的各个部分的尺寸来评估其质量。
缺陷检测则是检测模型中可能存在的缺陷或瑕疵,以便及时修复或更换。
七、应用领域三维检测的技术流程可以应用于各个领域。
在工业制造中,可以用于产品的质量检测和零部件的精确测量。
目录 摘要………………………………………………………………………1 第一章. 三维数据的应用 ……………………………………………2 第二章. 三维数据绘制方法 …………………………………………5 2.1三维数据的获取和网格绘制 …………………………………………………5 2.2三维激光扫描仪和点绘制 ……………………………………………………7 2.3基于局部分段线性拟合的绘制方法…………………………………………10 第三章. 基于局部分段线性拟合的绘制方法………………………13 3.1总体描述和主要问题…………………………………………………………13 3.2 K近邻搜索和近邻点组织……………………………………………………15 3.2.1 K近邻方法的原理及其在模式识别中的应用 …………………………15 3.2.2可自定搜索范围的K近邻搜索方法……………………………………17 3.2.3近邻点组织………………………………………………………………20 3.2.4网格规整化………………………………………………………………21 3.3三维数据的绘制………………………………………………………………25 3.3.1记录已绘制面片的数据结构……………………………………………25 3.3.2绘制中重复面片的判断和消除…………………………………………27 第四章. 实验结果及分析……………………………………………32 4.1算法的时间和空间代价………………………………………………………32 4.2实验的视觉效果………………………………………………………………37 第五章. 讨论…………………………………………………………48 参考文献 ………………………………………………………………51 致谢 ……………………………………………………………………52 北京大学学士学位论文 摘要 三维建模在建筑、医用图像、文物保护、三维动画游戏、电影特技制作等领域有着广泛的应用。一个三维模型的建立过程包括三维初始数据的获取,对初始数据进行诸如去除噪声点、简化等处理,按照不同的方式组织三维数据,最终实现在计算机中绘制出具有三维特征的模型。 在三维建模中,最主要的问题就是使用三维数据进行绘制,要使得绘制出的模型有立体感和真实感,达到理想的视觉效果;同时还要较好地组织数据,减少存储空间以便于数据的传输和加快显示速度。 多边形网格绘制是目前的标准绘制方法,它把三维模型表面的点连接成以多边形为单位的网格,可以表达复杂的表面,提供更强的适应性,其中尤以三角网格的使用最为广泛。目前国际上多边形网格绘制技术已经很成熟了,而流行的各种3D制作软件,如3D Studio Max等,都可以实现三维物体的网格建模和绘制。但最近几年,三维图像处理领域出现并普及了新的工具——三维激光扫描仪,它可以方便快捷地检测一个三维物体表面各点的空间位置,将三维物体表示成空间中大量密集分布的点,我们称之为点云数据。于是又有人提出了点绘制的思想,即在每一个点上绘制一个面或其他几何体,当点云密度足够大时,就可以把整个模型绘制出来。两种方法各有优劣,本文就试图在这两种方法中找到一条中间道路,取其各自的长处而补其不足。 本文分五个章节。第一章“三维数据的应用”介绍当前三维数据和三维建模技术在各个邻域的应用。第二章“三维数据绘制方法”分别介绍多边形网格绘制和点绘制技术各自的发展和性质,在比较其优劣的基础上提出本文的方法。第三章“基于局部分段线性拟合的点云数据绘制方法” 具体介绍本方法的思路和实现。第四章“实验结果及分析”先介绍了本方法的时间和空间代价,和现行其他方法进行了比较;接着展示了实验中不同情况和阈值下得到的结果,和多边形网格绘制得到的模型做了比较。第五章“讨论”介绍目前存在的问题及初步解决方法,并提出将来要做的工作。
关键词——三维建模、三维模型绘制、K近邻、伞状网格 1 北京大学学士学位论文 第一章 三维数据的应用 我们身在一个三维的世界中,三维的世界是立体的、真实的。同时,我们处于一个信息化的时代里,信息化的时代是以计算机和数字化为表征的。随着计算机在各行各业的广泛应用,人们开始不满足于计算机仅能显示二维的图像,更希望计算机能表达出具有强烈真实感的现实三维世界。三维建模可以使计算机作到这一点。所谓三维建模,就是利用三维数据将现实中的三维物体或场景在计算机中进行重建,最终实现在计算机上模拟出真实的三维物体或场景。而三维数据就是使用各种三维数据采集仪采集得到的数据,它记录了有限体表面在离散点上的各种物理参量。它包括的最基本的信息是物体的各离散点的三维坐标,其它的可以包括物体表面的颜色、透明度、纹理特征等等。三维建模在建筑、医用图像、文物保护、三维动画游戏、电影特技制作等领域起着重要的作用。 在建筑领域,一个建筑物如果用普通二维图片(比如照片)表示,会造成对某些细节部位或内部构造观察的不方便。而建造时使用的图纸虽然包含了大量的信息,对于非专业人士来说却不容易看懂而且很不直观。如果使用三维建模的方法重建出这个建筑的三维模型,那么就可以直接观察这个建筑的各个侧面,整体构造,甚至内部的构造,这无论对于建筑师观看设计效果,还是对于客户观看都是很方便的。 在医学方面,自从100年前伦琴发现X射线以来,医学图像处理技术已经经历了很长的路程。得到三维人体解剖图[12]一直是人们努力追求的目标。德国汉
堡大学医用数学和医用计算机研究所的Hohne教授领导的研究小组,开展了项目名称为Voxel-Man(体素和人)的解剖三维可视化研究。利用Voxel-Man的工具,医生可以模拟外科手术和立体定位或开洞。Voxel-Man具有极高的外科临床和教学价值,这在医学发展史上是一个新的里程碑。另一个三维建模在医学中的应用是虚拟手术[11]。美国最负盛名的私立医院集团Maya Clinic的生物医学图像处理资源中心,自70年代以来就致力于计算机生物医学图像的研究。在已有十余年经验的基础上,他们开发和设计了可以让外科医生观察CT和MRI数据的3D交互式外科辅助系统。医生可以在手术前预先规划手术方案,这样医
2 北京大学学士学位论文 生做手术就会更加准确,同时还可以在计算机上预演手术过程,使手术更安全。 三维建模在文物保护中也发挥着重要的作用。有的文物或古建筑由于年代太久远或者各种侵蚀难以保存,有些文物有着珍贵的价值不能直接供人们观赏。可以利用三维建模将文物和古建筑通过影像采集、数字处理、数据压缩等技术制成三维形象,然后人们就可以随意的从各个角度观看和欣赏文物和古建筑,同时也是一种保存和研究文物的办法。当数据积累到一定程度,还可以开展网络博物馆等文物展览项目,可以在保护文物的同时达到更广泛推广的目的。近年国内开始逐渐重视这方面的工作,比如故宫数字博物馆就在积极筹建中,其太和殿及其周边场景的三维模型就已经由日本凸版株式会社制作完成,实现了场景漫游,具有相当的真实感,细节表现也很优秀。 在电脑游戏业高度发达的今天,尽量追求游戏的真实和画面的华丽几乎是所有制作者的共识。于是,三维游戏应运而生,开始仅仅是在游戏中加入三维动画,现在已经出现了全程使用三维场景的游戏,比如Square Soft的Final Fantasy系列。以其优美的人物设计以及豪华的3D场景征服了无数玩家,而成为风靡全 图1.1 游戏《Final Fantasy X》的主人公
球的畅销游戏。右上方的图像中是Square Soft于2002年推出的大作 《Final Fantasy X》中的男女主人公,从人物到场景,全都使用了三维模型,而且刻画极为精致细腻,有很好的视觉效果和冲击力。对比以前比较呆板的2D游戏,其在真实性和吸引力上的优势是显而易见的。 在电影特技制作方面,三维建模技术也有着广泛的应用。起先,电影中的很多特殊场景如外星球、古代城市等都要通过搭建微缩模型来实现拍摄,不仅成本高、耗时长、后期制作困难,而且也不容易有真实的效果。对于某些危险的镜头,
3 北京大学学士学位论文 需要精密的布置和策划,采用各种防护措施,最后还是不能保证万无一失。当三维建模技术被引进之后,现实世界中不可能出现的场景都可以被完美地构造出来,许多危险的镜头现在只需要在电脑前操作鼠标就可以完成,而且制作速度快、效果好。在最近的一两年,三维建模技术运用于电影制作取得了令人惊异的进展:出现了第一部完全由电脑制作的3D仿真电影——《最终幻想》,这部由美国哥伦比亚三星电影公司出品的数字巨片耗资2.4亿美元,历时4年,它首次用电脑来制作所有的演员、道具、布景,影片中没有一个真人,但是虚拟演员在线条、毛发、皮肤、纹理、表情等方面已经几乎与真人别无二致。左图显示了电影中虚拟人物的3D模型和最后制成的效果,其真实程度之高让人不得不感叹三维建 模技术的神妙。 图1.2 电影《最终幻想》的虚拟人物 总之,三维建模正在广泛地应用于越来越多的领域,并且以其提供直观、方便的三维图像等特点在各领域中发挥越来越重要的作用。 在三维建模中,最主要的问题就是使用三维数据进行绘制,如何使得绘制出的模型有立体感和真实感,要保证模型的表面平滑、无毛刺、无漏洞,达到比较理想的视觉效果;同时还要较好地组织数据,减少存储空间以便于数据的传输和加快显示速度。下一章将介绍已有的三维数据绘制方法以及本文提出的新方法。
4