测量毕业设计
- 格式:docx
- 大小:23.56 KB
- 文档页数:10
毕业设计(论文)题目: 2700用于人体皮肤温度的测量专业: 精密仪器制造与维修班级:学号:姓名:指导老师:摘要皮肤温度是一个敏感的指标,与人的温热感觉、脉搏变化基本上是相平行的,因此是评价小气候对人体影响的常用生理指标。
由于在同一环境中机体各部位的皮肤温度可能相差很大,如何准确、有效地测量其温度就极为重要。
本文介绍了采用美国Keithley 仪器公司的2700数字多用表对人体皮肤温度进行准确有效地测量的方案。
测温的关键是:安装配置7700多路开关模块,多通道测量人体不同部位的皮肤温度;选择合适的传感器进行合理的连接,以达到所要求的精度;安装使用Integra UP & Running 软件,测量并记录所测数据。
关键字:皮肤温度 2700 7700多路开关模块传感器 Integra UP & Running 软件AbstractSkin temperature is a sensitive indicator, the warm feeling the pulse of change is basically parallel, it is to evaluate climate on human physiological effects of commonly used indicators. As in the same environment of the body parts of the skin temperature can vary enormously, how accurate, effective measurement of the temperature becomes very important. This paper describes the equipment used by the U.S. Keithley's 2700 digital multimeter to human skin temperature accurate measurement of the effective program. Temperature is the key : the installation of more than 7,700 road configuration switch modules, multi-channel measurement of the human body in different parts of the skin temperature; choose a suitable sensor reasonable link to reach the required precision; Integra installation UP & Running software, measuring and recording the measured data.Keywords: Skin temperature 2700 7700 Multi-sensor switch module Integra UP & Running Software目录摘要 (I)ABSTRACT (II)目录 (III)第1章绪论 (1)1.1人体皮肤温度 (1)1.2测量体温的方法 (2)1.2.1传统测温 (2)1.2.2红外测温法 (3)第2章KEITHLEY 2700的特性及扫描原理 (4)2.1特性 (4)2.2扫描 (6)2.2.1扫描原理 (6)2.2.2 通道分配 (6)2.2.3扫描过程 (7)2.2.4触发方式 (7)2.2.5扫描配置 (9)第3章2700测皮温系统组成及原理 (11)3.1系统组成 (11)3.2测温原理 (12)3.32700测皮温的优点 (13)第4章传感器的选择 (14)4.1传感器的概念 (14)4.2热电偶的类型 (15)第5章系统测温过程 (16)5.1安装7700模块 (16)5.1.1简述 (16)5.1.2 原理图 (16)5.1.3连接和安装 (18)5.2热电偶的连接 (19)5.3在计算机上安装I NTEGRA UP&R UNNING 软件 (20)5.4具体操作 (20)5.4.1 上电开机过程 (21)5.4.2设置量程 (21)5.4.3 设定位数 (21)5.4.4设置速度和带宽 (22)5.4.5设置滤波器 (22)5.4.6通道信号的测试 (25)5.4.7Integra UP &Running 软件的设置 (26)5.4.7扫描及读数 (29)5.4.8数据存盘 (30)6 测温过程应注意的几个问题 (31)6.1预热 (31)6.2自动校零 (31)6.3LSYNC(与电源周期的同步) (31)结论 (33)致谢 (34)参考文献 (35)第1章绪论1.1人体皮肤温度研究表明,人体不同部位的温度是不同的。
摘要随着铁路的连年提速,铁路巡道工可以有效工作的无车时间越来越短,原有的人工拉线检测方法已经不能适应公务检测要求,便携式轨道检测车能够大幅度提高铁路巡道工的检测效率,减轻巡道工的劳动强度,使用便携式轨道检测车进行线路日常检测是工务检测的必然趋势。
本文提出了便携式轨道检测车的总体方案,根据铁道部各项标准提出了总体性能要求,并作了便携式轨道检测车的总体布置设计。
设计了轨道几何形位参数包括轨距、水平、高低、轨向、里程等参数的测量方案。
从根本上解决了以往轨道几何形位参数测量过程中,因为难以找到可靠测量记录使得精度一直难以提高的问题。
完成了便携式轨道检测车的结构方案设计,根据系统总体结构布置,对倾角传感器、磁栅尺传感器、电涡流传感器、光电编码器做了一定程度上的性能分析,确定了其安装方法。
叙述了便携式轨道检测车的发展里程和前景。
关键词:轨道检测;结构设计;测量参数。
AbstractYear after year with the speed railway, the railway workers can effectively patrol road work car-free time is more and more short, the man pull detection method can not meet the requirements of public inspection, portable track inspection vehicle can significantly improve the railway workers Patrol Road detection efficiency, reduce labor intensity patrol road workers, the use of portable track inspection vehicle for line detection routine testing is the inevitable trend of public works.In this paper, the overall portable track inspection vehicle program, according to the criteria proposed by the Ministry of Railways overall performance requirements, and made portable track inspection vehicle's overall layout design. Geometrical design parameters, including track gauge, level, height, and track the mileage and other parameters in the program. A fundamental solution to the previous track geometry measurement position and configuration process, it is difficult to find reliable records makes the accuracy of measurement has been difficult to raise the issue.Completion of the structure of portable track inspection vehicle design, the overall structure of the system layout, on the angle sensor, magnetic grid scale sensors, eddy current sensors, optical encoder to do a certain degree of performance analysis, to determine its installation method. Describes the development of portable track inspection vehicle mileage and prospects.Keywords: track detection; structural design; parameter measurement目录摘要 (I)Abstract (II)第1章绪论 (1)1.1 设计T型轨道测量小车的背景 (1)1.2 T型轨道测量小车的概况 (1)1.2.1 T型轨道检测小车的发展 (1)1.2.2 T型轨道测量小车的应用 (3)1.2.3 T型轨道测量小车的测量意义 (3)1.3 T型轨道测量小车的工作原理 (4)1.4 T型轨道测量小车的特点 (5)1.4.1 T型轨道测量小车的优点 (5)1.4.2 T型轨道测量小车的缺点 (6)第2章T型轨道测量小车的总体方案设计 (6)2.1 给定的设计原始数据 (6)2.2 T型轨道测量小车的总体方案 (7)2.2.1 总体测量方案 (7)2.2.2 系统组成 (8)2.2.3 总体结构布置设计 (9)2.3 T型轨道测量小车的方案对比 (10)第3章T型轨道测量小车主要零部件的设计与计算 (11)3.1 T型轨道测量小车的零部件设计与计算 (11)3.1.1 行走轮机构的设计 (11)3.1.2 导向轮机构的设计 (14)3.1.3 测量轮机构的设计 (15)3.1.4 可伸缩把手的设计 (16)3.1.5 深沟球轴承的校核 (17)3.2 T型轨道测量小车的结构设计 (18)3.2.1 T型轨道测量小车的组成 (18)3.2.2 T型轨道测量小车车架方案设计 (18)3.2.3 T型轨道测量小车测量参数的定义以及传感器的选型、安装 (19)第4章T型轨道测量小车单片机测控电路设计 (24)4.1 总体设计 (24)4.1.1 系统总体设计 (24)4.1.2 系统工作流程 (24)4.1.3 主机的选择 (26)4.2 硬件模块设计 (26)4.3 信号调理电路原理图的设计 (27)4.3.1 信号调理 (27)4.3.2 电源变换 (29)4.4 CPU处理模块原理图的设计 (30)4.4.1 CPU的选用及其性能介绍 (30)4.4.2 A/D芯片的选用及其性能介绍 (31)4.4.3 硬件接口设计 (32)4.5 基于U盘得单片机海量存储PCB板的设计 (33)4.5.1 USB系统组成 (34)4.5.2 嵌入式USB主机接口芯片SL811HS介绍 (34)4.5.3 单片机与SL811HS的硬件接线 (37)结论 (38)致谢 (39)参考文献 (40)ContentAbstract (II)Chapter 1 Introduction (1)1.1 Measurement of T-rail car design background (1)1.2 Measurement of T-track profile of the car (1)1.2.1 Detection of T-track the development of car (1)1.2.2 Measurement of T-rail car applications (3)1.2.3 T-track measurement of significance of measuring car (3)1.3 T-track measurement car works (4)1.4 T-track measurement of the characteristics of car (5)1.4.1 T-track measurement of the advantages of car (5)1.4.2 T-track measurement of the shortcomings of the car (6)Chapter 2 T-track measurement of the overall car design (6)2.1 The design of the original data given (6)2.2 T-track measurement of the overall program car (7)2.2.1 Overall measurement scheme (7)2.2.2 System components (8)2.2.3 Overall structure of the layout design (9)2.3 Measurement of T-track comparison car program (10)Chapter 3 Measurement of T-rail car design and calculation of the main components (11)3.1 Measurement of T-track design and calculation of car parts (11)3.1.1 Walking round the design of institutions (11)3.1.2 The design guide wheel mechanism (14)3.1.3 Measuring wheel mechanism design (15)3.1.4 The design of the telescopic handle (16)3.1.5 Check deep groove ball bearings (17)3.2 T-track measurement of car design (18)3.2.1 T-track measurement of the composition of car (18)3.2.2 Measurement of T-rail car chassis design (18)3.2.3 Measurement of T-rail car and the sensors measure the parameters of theinstallation of the definition of car (19)Chapter T-track measurement car MCU Control circuit design (24)4.1 Overall design (24)4.1.1 Overall system design (24)4.1.2 System Workflow (24)4.1.3 The choice of host (26)4.2 Hardware Module (26)4.3 Signal conditioning circuit schematic design (27)4.3.1 Signal Conditioning (27)4.3.2 Power conversion (29)4.4 CPU processing module design schematic (30)4.4.1 Described the selection and performance CPU (30)4.4.2 A / D chip and the performance of selected introduced (31)4.4.3 Hardware interface design (32)4.5 U disk based mass storage may MCU PCB board design (33)4.5.1 USB system components (34)4.5.2 Embedded USB host interface chip SL811HS Introduction (34)4.5.3 The hardware connection between SCM and SL811HS (37)Conclusions (38)Acknowledgements (39)References (40)第1章绪论1.1 设计T型轨道测量小车的背景目前,我国铁路整面临着第六次提速的考验。
超声波测距设计毕业设计一、引言距离测量在许多领域都具有重要的应用,如工业自动化、机器人导航、汽车防撞等。
超声波测距作为一种非接触式的测量方法,具有测量精度高、响应速度快、成本低等优点,因此在实际工程中得到了广泛的应用。
本次毕业设计旨在设计一种基于超声波的测距系统,实现对目标物体距离的准确测量。
二、超声波测距原理超声波是一种频率高于 20kHz 的机械波,其在空气中的传播速度约为 340m/s。
超声波测距的原理是通过发射超声波脉冲,并测量其从发射到接收的时间间隔,然后根据声速和时间间隔计算出目标物体与传感器之间的距离。
假设发射超声波脉冲的时刻为 t1,接收到回波的时刻为 t2,声速为c,距离为 d,则距离 d 可以通过以下公式计算:d = c ×(t2 t1) / 2三、系统硬件设计(一)超声波发射模块超声波发射模块主要由超声波换能器和驱动电路组成。
超声波换能器将电信号转换为超声波信号发射出去,驱动电路则提供足够的功率和电压来驱动换能器工作。
(二)超声波接收模块超声波接收模块主要由超声波换能器、前置放大器、带通滤波器和比较器组成。
换能器将接收到的超声波信号转换为电信号,前置放大器对信号进行放大,带通滤波器去除噪声和干扰,比较器将信号整形为方波信号。
(三)控制与处理模块控制与处理模块采用单片机作为核心,负责控制超声波的发射和接收,测量时间间隔,并计算距离。
同时,单片机还可以将测量结果通过显示模块进行显示,或者通过通信模块与上位机进行通信。
(四)显示模块显示模块用于显示测量结果,可以采用液晶显示屏(LCD)或数码管。
(五)电源模块电源模块为整个系统提供稳定的电源,包括 5V 和 33V 等不同的电压等级。
四、系统软件设计(一)主程序流程系统上电后,首先进行初始化操作,包括单片机的初始化、定时器的初始化、端口的初始化等。
然后进入主循环,不断地发射超声波脉冲,并等待接收回波。
当接收到回波后,计算距离,并进行显示或通信。

湘潭大学毕业设计说明书题目:太浮山旅游公路1:2000数字地形图航空摄影测量技术设计学院:专业:学号:姓名:指导教师:完成日期: 2013年5月25日湘潭大学毕业论文(设计)任务书设计题目:XX公路1:2000带状地形图航空摄影测量技术设计学号:姓名:专业:指导教师:系主任:一、主要内容及基本要求主要内容:1、航空摄影技术设计。
航空摄影基本技术指标和要求,航摄参数的确定。
2、基础控制测量。
包括四等首级平面控制网、一级导线加密控制网方案以及四等水准。
3、1:2000数字线划图(DLG)生产技术设计。
航空摄影测量实施方案,1:2000数字线划图(DLG)生产工作流程,像控点布设及测量,内业空三加密,数字线划图成果的制作。
基本要求:1、设计方案可行,精度合理,技术指标符合规范要求。
2、应提供必要的技术设计图表。
3、应参照《测绘技术设计规定》并结合项目要求编写设计书的基本内容。
4、论文格式及文本要求应符合湘潭大学毕业论文(设计说明书)文本要求规定。
二、重点研究的问题1、航空摄影方案设计2、基础平面和高程测量方案设计3、1:2000数字地形图航空摄影测量方案设计四、应收集的资料及主要参考文献应收集的资料:测区范围、测区内地理概况、交通、气象、居民等情况说明;已有测绘资料情况;测区1:1万地形图;[1] 孔祥元,郭际明.控制测量学下册[M].武汉:武汉大学出版社,2011[2]中国标准出版社第四编辑室.测绘标准汇编摄影测量与遥感卷[S].北京:中国标准出版社,2009 [3]GB/T 18314-2009 全球定位系统测量规范.北京:中国标准出版社,2009[4]GB/T 12898-2009 国家三、四等水准测量规范.北京:中国标准出版社,2009[5]CH 1002-1995 测绘产品质量评定标准.北京:中国标准出版社,1995[6]GB/T 7929-1995 1:500 1:1000 1:2000地形图图式.北京:中国标准出版社,1995[7]北京市测绘设计研究院.CJJ 8-99城市测量规范[S].中国建筑工业出版社,1999[8]交通部第一公路勘察设计院.JJG C10-2007公路勘测规范.人民交通出版社,19999]赵吉先,吴良才,周世健.地下工程测量[M].北京:测绘出版社,2011[10]徐绍铨,张华海,杨志强,王泽民.GPS测量原理及应用[M].武汉:武汉大学出版社,2011[11]CH 1002-1995 测绘产品质量检查验收规定.北京:中国标准出版社,1995[12]CH/T 1004-2005 测绘技术设计设计规定.北京:中国标准出版社,2005湘潭大学毕业论文(设计)评阅表学号5 姓名周技专业测绘工程毕业设计题目:太浮山旅游公路1:2000数字地形图航空摄影测量技术设计湘潭大学毕业论文(设计)鉴定意见学号:5 姓名:周技专业:测绘工程目录太浮山旅游公路1:2000数字地形图航空摄影测量技术设计摘要:航空摄影测量指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制点测量、调绘和立体测绘等步骤,绘制出地形图的作业。
基于单片机的温度测量系统毕业设计论文摘要:本文设计了一种基于单片机的温度测量系统。
该系统主要由传感器、单片机、显示屏等组成,通过传感器获取环境温度数据,由单片机进行数据处理和显示,并通过显示屏将温度数据以直观的形式展现出来。
通过与市场上现有的温度测量设备对比,本系统具有体积小、功耗低、精确度高、价格便宜等优点。
该系统在工业生产、科研实验等领域具有广泛应用前景。
关键词:单片机;温度测量;传感器;显示屏第一章引言1.1研究背景温度是工业生产和科学研究中的一个重要参数,对于保证生产质量、保障实验准确性具有至关重要的作用。
在现有的温度测量设备中,电子温度计是一种常见的测量方法。
然而,由于传统电子温度计通常体积较大、功耗较高,不便携,而且价格较高,因此有必要设计一种体积小、功耗低、价格便宜的新型温度测量系统。
1.2研究目的本文的研究目的是设计一种基于单片机的温度测量系统,以提供一种便携、实用的温度测量解决方案。
通过传感器采集环境温度数据,通过单片机进行数据处理和显示,并通过显示屏将温度数据以直观的形式展现出来。
第二章原理与方法2.1系统组成在本系统中,主要使用了DS18B20数字温度传感器、STC89C52单片机、液晶显示屏等元件。
其中DS18B20传感器采用了一线总线通信,可直接与STC89C52单片机进行通信。
单片机通过扫描传感器获取温度数据,并通过液晶显示屏进行显示。
2.2系统设计系统的设计主要分为硬件设计和软件设计两部分。
硬件设计包括传感器和单片机的连接电路设计,以及显示屏的驱动电路设计。
软件设计包括单片机程序的编写和液晶显示屏的显示程序设计。
第三章系统实现3.1传感器连接电路设计通过DS18B20传感器的一线总线接口,将其与STC89C52单片机相连。
传感器的数据线连接到单片机的P2口,同时需要上拉电阻器上拉电平。
3.2显示屏驱动电路设计显示屏使用了基于平行接口的1602型液晶显示屏,根据显示屏的规格书,设计了驱动电路。
摘要为贯彻落实《国务院关于开展第二次全国土地调查的通知》(国发〔2006〕38号)精神,全面查清第一次土地利用现状调查以来土地利用的分类、分布、面积和权属的现状,以及自然的变化和人为的变更状况,建立和完善土地调查、统计和登记制度,实现土地资源信息的社会化服务,满足经济社会发展及国土资源管理的需要。
经泗阳县人民政府批准,泗阳县泗阳县国土资源局决定自2008年起,利用近一年的时间,在全市范围内开展第二次土地调查项目,按《第二次全国土地调查技术规程》要求,逐地块实地调查土地的地类、面积和权属,掌握各类用地的分布和利用状况,以及国有土地使用权和集体土地所有权状况;依据基本农田划定和调整资料,将基本农田地块落实至土地利用现状图上,掌握全区基本农田的数量、分布和保护状况;根据需要进行耕地后备资源调查;建设土地调查数据库及管理系统,对第二次调查成果中的1:5000影像、图形、地类和权属进行一体化的信息管理。
为规范作业方法,泗阳县开展第二次土地调查工作,采用以1:5000比例尺的正射影像图作为调查底图,利用现有资料,根据以往土地调查图件资料、土地利用数据库作为参考资料,采用直接对地类和界线进行野外调查,既实地对每块土地的地类、界线等情况进行外业调查,并详细记录,特别对新增或与调查底图不一致的应补测、绘制相应图件,填写农村土地调查记录手簿。
将外业调查地图上的调绘信息、权属性质、权属单位、地类状况、线状地物以及外业实地丈量的线状地物宽度等土地利用信息准确反映到1:5000正射影像图上。
本文简要介绍了泗阳县土地调查技术数据处理,内业成图采用的是AtuoCAD、Atuodask map软件,正射影像图系统由江苏省金威遥感数据工程有限公司以徐州观音机场为基地,使用常州江南通用航空公司的Y-5飞机,采用DMC 数码航空摄影系列软件。
关键词:地籍调查数据矢量化内业成图成果整理目录第一章地籍调查 (5)1.1 地籍测量的定义 (5)1.2 地籍测量的特征 (5)1.3土地调查外业 (6)1.3.1调查准备 (6)1.3.2外业调查内容 (7)1.3.3外业调查原则 (8)1.4第二次全国土地调查内业 (11)1.4.1调查内业内容 (11)第二章项目简介 (13)2.1项目概况 (13)2.1.1调查地区地理概况 (13)2.2.1泗阳县开展农村土地调查主要目的: (14)2.2工作流程 (15)2.3技术依据 (16)2.3.1主要技术依据 (16)2.3.2参考技术依据 (17)第三章地籍图矢量化处理 (18)3.1数据采集 (18)3.1.1数据采集内容: (18)3.1.2数据采集要求: (18)3.1.3数据采集步骤: (18)3.2数据拓扑 (23)3.2.1创建拓扑目的 (25)3.2.2拓扑检查 (25)3.2.3创建拓扑步骤 (26)3.3数据入库 (29)3.3.1数据入库目的 (29)3.3.2数据入库过程 (29)第四章权属确认 (30)4.1.1协议书定义 (30)4.1.2协议书内容 (30)4.1.3协议书要求 (30)4.2 协议书绘制 (33)第五章地籍调查表 (36)5.1.1调查表内容 (36)5.1.2调查表要求 (37)第六章总结 (41)致谢 (44)参考文献 (45)第一章地籍调查1.1 地籍测量的定义地籍测量是为获取和表达地籍信息所进行的测绘工作。
毕业设计论文《低频数字式相位测量仪》摘要该数字式相位测量仪以单片机 (89c52) 为核心 , 通过高速计数器 CD4040 为计数器计算脉冲个数从 , 而达到计算相位的要求 , 通过 8279 驱动数码管显示正弦波的频率,不采用一般的模拟的振动器产生 , 而是采用单片机产生 , 从而实现了产生到显示的数字化 . 具有产生的频率精确 , 稳定的特点 . 相移部分采用一般的 RC 移相电路 , 节省了成本。
一方案论证与比较 :1 常见正弦信号的测量方法 :方案一:采用模拟分离元件如二极管,三极管等非线性元件,实现频率的测量,检相的功能,使用起来方便,价格便宜,但采用分离元件由于分散性太大,不便于集成及数字化,而且测量误差大。
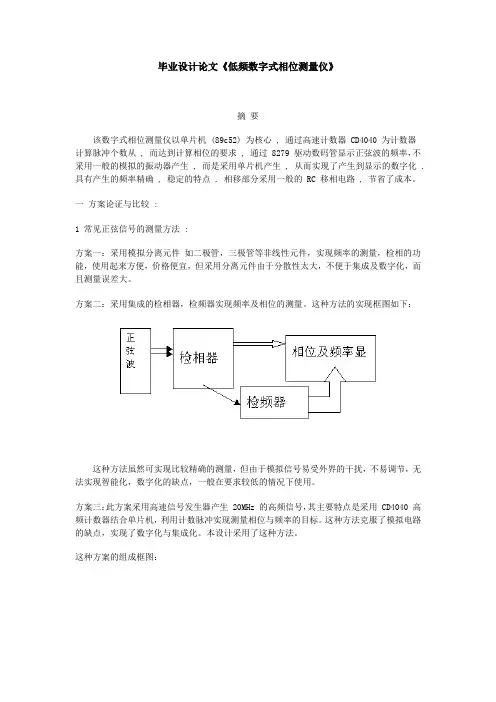
方案二:采用集成的检相器,检频器实现频率及相位的测量。
这种方法的实现框图如下:这种方法虽然可实现比较精确的测量,但由于模拟信号易受外界的干扰,不易调节,无法实现智能化,数字化的缺点,一般在要求较低的情况下使用。
方案三:此方案采用高速信号发生器产生 20MHz 的高频信号,其主要特点是采用 CD4040 高频计数器结合单片机,利用计数脉冲实现测量相位与频率的目标。
这种方法克服了模拟电路的缺点,实现了数字化与集成化。
本设计采用了这种方法。
这种方案的组成框图:二系统总体设计按照题目要求,我们设计的相位测量系统包括三部分:正弦波产生系统(包括频率调整电路),移相电路和相位显视系统,其总体框图如下:三各部分硬件电路设计及参数计算1、正弦波产生电路•方案一:利用 8038 芯片或 MAX038 可以实现压控的函数发生器通过改变少量的外围元件,可实现正弦波,方波,三角波,并可实现频率调节,但采用模拟器件由于元件分散性太大,即使使用单片函数发生器,参数也与外部元件有关,外接的电阻,电容对参数影响很大,因而产生的频率稳定度差,精度低,抗干扰能力差,调节困难,成本也高。
而且灵活性差,不能实现智能化。
基于单片机的脉搏测量仪设计目录摘要 (I)Abstract (I)引言 (1)第一章概述 (2)1.1选题的背景和意义 (2)1.2脉搏测量仪的发展与应用 (3)第二章总体方案的论证与设计 (5)2.1主控模块的选型和论证 (5)2.2显示模块的选型和论证 (5)2.3传感器的选型和论证 (5)2.4系统整体设计概述 (6)第三章系统硬件电路设计 (7)3.1主控模块 (7)3.1.1STC89C52单片机主要特性 (7)3.1.2STC89C52单片机的中断系统 (10)3.1.3单片机最小系统设计 (11)3.2LCD液晶显示器简介 (11)3.2.1液晶原理介绍 (12)3.2.2液晶模块简介 (12)3.2.3液晶显示部分与STC89C52的接口........................... 错误!未定义书签。
3.3信号采集电路设计.......................................................... 错误!未定义书签。
3.3.1传感器简介................................................................... 错误!未定义书签。
3.3.2滤波电路....................................................................... 错误!未定义书签。
3.3.3放大整形电路............................................................... 错误!未定义书签。
第四章系统软件设计 ................................................... 错误!未定义书签。
4.1系统软件总体设计.......................................................... 错误!未定义书签。
河南城建学院毕业设计(论文)任务书题目几种不同坐标变换方法问题的研究系别测绘与城市空间信息系专业测绘工程班级0814081 学号081408144 学生姓名杨亚指导教师卫柳艳发放日期2012年1月8日河南城建学院本科毕业设计(论文)任务书三、计划进度:第6 - 8周上图书馆查阅相关资料,了解几种不同坐标变换的方法及坐标变换中出现的问题。
第9 周论文开题及工作方案准备:撰写论文开题报告。
第10-11周调研、资料分析撰写论文写作大纲。
第12-13周编写毕业论文。
第14 周修改,整理打印提交论文。
第15 周论文答辩。
四、主要参考文献:[1]刘经南.坐标系统的建立和变换.武汉测绘科技大学.1995.[2]陈俊勇等.中国大地测量学发展的若干问题[J].武汉大学学报.2006.(6).[3]丁世俊.模型误差对平差结果及其参数估计性质的影响分析[J].四川测绘.1997.(1).[4]丁士俊等.深圳市城市控制网改造工程技术总结.深圳市国土局.1997.[5]李洪涛等.GPS应用程序设计[M].北京.科学出版社.1999.[6]GB50289-98.城市工程管线综合规划规范[S].[7]李黎.城市综合地下管线信息系统框架建设探讨[J].地理空间信息.2003.01 (4):6-9.[8]刘春.丛愛岩.基于“知识规则”的GIS水系要素制图综合推理[J].测绘通报.1999. (9):20-24.[9]朱世松.鲁汉荣.张恒喜.基于广义规则的知识表示方法[J].武汉理工大学学报(交通科学与工程版).2004.28 (1):151-154.注:任务书必须由指导教师和学生互相交流后,由指导老师下达并交教研室主任审核后发给学生,最后同学生毕业论文等其它材料一起存档。
stm32激光测距毕业设计概述说明以及解释1. 引言1.1 概述本篇长文介绍了关于stm32激光测距毕业设计的概述和说明。
激光测距技术作为一种精确测量目标距离的方法,在各个领域广泛应用。
通过将stm32微控制器与激光传感器相结合,可以实现高精度、快速且稳定的距离测量。
本文将详细介绍这一毕业设计项目的背景、设计要点以及硬件与软件平台选择。
1.2 文章结构本文分为五个部分进行论述。
引言部分主要对整个文章进行概述说明,以便读者能够有一个清晰的认识和理解。
第二部分将介绍stm32激光测距毕业设计的背景以及相关的设计要点,并探讨硬件与软件平台选择问题。
第三部分将详细阐述激光测距原理和技术,并解释stm32如何与激光传感器进行通信。
第四部分将详细叙述整个设计实现过程,并提供关键问题的解决方案,包括硬件设计流程和软件设计流程。
最后一部分是结论与展望,对实验结果进行分析总结,并提出存在问题的改进方向和对毕业设计的建议性意见。
1.3 目的本文的目的是为读者提供一个全面、系统的介绍和解释,使其能够深入了解stm32激光测距毕业设计的背景、原理以及实现过程。
通过对硬件设计和软件设计的流程以及关键问题解决方案进行详细说明,帮助读者理解整个项目的开发过程和技术要点。
最后,结合实验结果和总结评价,给出存在问题的改进方向和对毕业设计的建议性意见。
该篇长文旨在为相关领域研究人员提供有用的参考和指导,促进激光测距技术在更广泛范围内的应用与推广。
2. stm32激光测距毕业设计:2.1 背景介绍:在现代技术中,激光测距技术在很多领域得到广泛应用,例如自动驾驶、机器人导航、工业检测等。
本文旨在设计并实现一套基于STM32的激光测距系统,通过该系统可以准确、快速地测量目标物体的距离。
2.2 设计要点:针对激光测距系统的设计,我们需要考虑以下几个关键要点:- 精确性:设计一个精度高、误差小的激光测距系统是非常重要的。
在选择硬件和实施软件算法时要注重精确性。

安徽机电职业技术学院毕业论文基于STM32的脉搏测量仪设计安徽机电职业技术学院2015届毕业生毕业论文成绩评定单姓名xxx 专业xx 班级xxxx课题基于STM32的脉搏测量仪设计评分标准分值得分指导教师评语(40分)设计方案合理、实用、经济、原理分析正确、严密,内容完整。
10计算方法正确,计算结果准确,程序设计正确简洁,工艺合理。
5元器件(材料)选择合理,明细表规范。
5图面清晰完整,布局、线条粗细合理,符合国家标准。
5文字叙述简明扼要,书写规范。
5按时独立完成,同学相互关心,遵守制度,认真负责。
10合计得分:指导教师签名:日期:年月日评阅教师评分(30分)内容充实,有阶段性成果,有应用价值。
10图纸、论文如实反映设计成果,有理论分析,又有实践过程。
10语句通顺,思路清晰,符合逻辑。
5图标清晰,文字工整,字符和曲线标准化。
5合计得分:评阅教师签名:日期:年月日答辩评分(30分)自述条理明确,重点突出。
5基本概念清楚,回答问题正确。
15专业知识运用灵活,解决问题技术措施合理。
10合计得分:答辩组长签名:日期:年月日总得分:等级系主任签名:日期:年月日指导教师评语等级签名日期安徽机电职业技术学院毕业论文指导过程记录表题目基于STM32的脉搏测量仪设计学生姓名x 学号x 指导教师xx系部电气工程系班级x 顺序号第 1次学生完成毕业论文(设计)内容情况第一周: 指导老师布置毕业设计课题,要求学生查阅有关毕业设计的相关资料;学生签名:时间:年月日教师指导内容记录教师签名:时间:年月日安徽机电职业技术学院毕业论文指导过程记录表题目基于STM32的脉搏测量仪设计学生姓名x 学号x 指导教师xx系部电气工程系班级x 顺序号第 2次学生完成毕业论文(设计)内容情况第二周:主要是把毕业设计方案要确定下来。
和同学们熟悉实验室相关设备并掌握单片机结构原理。
学生签名:时间:年月日教师指导内容记录教师签名:时间:年月日安徽机电职业技术学院毕业论文指导过程记录表题目基于STM32的脉搏测量仪设计学生姓名x 学号x 指导教师xx系部电气工程系班级x 顺序号第 3次学生完成毕业论文(设计)内容情况第三周:在指导老师的指导下,完成毕业设计并焊出实物得出相关结论并写报告;学生签名:时间:年月日教师指导内容记录教师签名:时间:年月日安徽机电职业技术学院毕业论文指导过程记录表题目基于STM32的脉搏测量仪设计学生姓名x 学号x 指导教师xx系部电气工程系班级xx 顺序号第 4次学生完成毕业论文(设计)内容情况第四周:完成基于基于STM32的脉搏测量仪设计得出结论并总结,把论文的内容主体写好。
利用GPS(RTK)进行工程放样及其精度分析系别:资源与土木工程系专业名称:工程测量年级:2009姓名:李振华学号:0941140212指导老师:张存连摘要本论文主要介绍GPS(RTK)的基本原理、系统组成、技术特点、误差来源和使用方法及操作步骤,并利用GPS(RTK)在工程测量中进行点放样、曲线放样,对测量结果进行精度分析。
通过对放样点测量结果的精度分析,得出了GPS(RTK)的测量精度是可以达到工程放样的精度要求的结论,并且通过工程实例说明了GPS(RTK)具有工作效率高、定位精度高、全天候作业、数据处理能力强和操作简单易于使用等特点。
通过本文的论述我们了解了如何使用GPS(RTK)进行工程放样,并为GPS(RTK)在工程放样的可行性进行了论证,拓展了GPS(RTK)在测量领域的应用范围,增强了使用GPS(RTK)的实际操作能力,为以后承担更多的测量工作奠定了基础。
关键词:GPS(RTK);工程放样;点放样;曲线放样;目录摘要 (Ⅰ)第1章绪论 (1)1.1 概述 (1)1.2R T K应用于工程放样分析 (1)1.3 本章小结 (2)第2章 RTK基本原理、误差来源及作业过程 (3)2.1 RTK基本原理、误差来源及作业过程 (3)2.1.1 RTK的基本原理、系统组成及工作条件 (3)2.1.2 RTK的误差来源和测量精度 (4)2.1.3 RTK的技术特点 (6)2.1.4 RTK的局限性和精度保障 (6)2.1.5 RTK的作业过程 (7)2.2本章小结 (8)第3章利用RTK进行点放样和曲线放样 (9)3.1 利用RTK进行点放样 (9)3.1.1点放样工程实例 (9)3.1.2 点放样的精度分析 (10)3.2 利用RTK进行曲线放样 (12)3.2.1 曲线放样的一般方法 (12)3.2.2 曲线放样工程实例 (13)3.2.3 曲线放样的精度分析 (14)3.3 本章小结 (15)结论 (16)参考文献 (17)致谢 (18)附录 (19)第1章绪论1.1 概述‘全球定位系统/卫星测时测距导航’(Navigatain Satellite Timing and Ranging/Global Positioning System)是由美国国防部联合美国海、陆、空三军为满足其军事导航定位而建立的无线电导航定位系统,简称GPS系统。
毕业设计题目:GPS RTK在公路工程控制测量中的应用系别:专业:姓名:学号:指导教师:河南城建学院2011年月日河南城建学院毕业设计任务书题目GPS RTK在公路工程控制测量中的应用系别专业班级学号学生姓名指导教师发放日期河南城建学院专科毕业设计任务书审核后发给学生,最后同学生毕业论文等其它材料一起存档。
毕业设计成绩评定答辩小组评定意见一、评语(根据学生答辩情况及其论文质量综合评定)。
二、评分(按下表要求评定)答辩小组成员签字年月日毕业答辩说明1、答辩前,答辩小组成员应详细审阅每个答辩学生的毕业设计(论文),为答辩做好准备,并根据毕业设计(论文)质量标准给出实际得分。
2、严肃认真组织答辩,公平、公正地给出答辩成绩。
3、指导教师应参加所指导学生的答辩,但在评定其成绩时宜回避。
4、答辩中要有专人作好答辩记录。
指导教师评定意见一、对毕业设计(论文)的学术评语(应具体、准确、实事求是):签字:年月日二、对毕业设计(论文)评分[按下表要求综合评定]。
(1)理工科评分表(2)文科评分表指导教师签字:年月日摘要公路GPS控制测量是利用全球定位系统(GPS)测量公路各控制点坐标的测量。
GPS卫星定位系统很早就已应用于国民经济的各个领域,近些年来随着GPS RTK 技术的出现以及GPS接收机空间定位精度的不断提高,GPS RTK技术已广泛用于大地测量、工程测量、航空摄影测量以及地形测量等各个测量领域。
本次设计着重介绍了用GPS网作为高速公路路线首级控制测量的方法,并对GPS 网的选点与布设、观测与联测、误差来源及精度标准、数据质量与数据处理、网平差与坐标转换等进行了分析。
同时还就如何消除测量中的误差,提高其测量精度提出了相应的方法。
GPS 新技术的出现,可以高精度并快速地测定各级控制点的坐标,在地形测量中已得到广泛地应用。
本文介绍了GPS(RTK) 配合全站仪的作业流程, 简要阐明了其在道路测量中的应用。
关键词:GPS RTK,数字测图,全球定位系统(GPS),控制测量;abstractHighway GPS control measurement is using global positioning system (GPS) measurement of each control point coordinates measuring highway.GPS has long application of economic fields peaked in recent years withthe emergence of GPS RTK technology and the spatial location accuracy of GPS receiver unceasing enhancement, GPS has been used widespreadly RTK technology geodetic, engineering surveying and aerial photography measure and topographic etc. Each measurement field.Introduced the design with GPS network as highway route heads and the method of control measure of GPS nets source and layout, observation and league measurement, error sources and precision standards, data quality and data processing, nets adjustment and coordinate transformation were analyzed. Also on how to eliminate the error of measurement, improve its precision puts forward corresponding methods.The emergence of new technology, GPS and rapid determination can be high precision control at all levels in the coordinates, bathymetric survey has beenwidely. This paper introduces the GPS (RTK) in cooperation with electronic tachometer work flow, briefly explains its application in the measurement of the road.Keywords:Digital surveying , Global positioning system (GPS), Control measure ;目录1、前言 (4)1.1 GPS系统的组成……………………………………………………错误!未定义书签。
工程测量毕业论文精选范文2篇工程测量毕业论文范文一:gps在水利工程测量中的应用水利工程建设是一项系统性和复杂性极强的工程项目,在建设过程中需要穿越的地形和地质特点尤为复杂。
因此,施工之前的测量工字钢就显得尤为重要。
在实际的测量过程中,通过应用gps技术能够显著提高测量工作的效率和精度。
但是,在实际的操作过程中,需要结合不同的测量项目进行针对性的测量工作,这样才能保证整个工程的测量水平。
1gps测量工作原理及其技术特点1.1gps测量工作原理gps即globalpositioningsystem(全球定位系统),当在当前社会生产生活中得到了广泛的应用。
其作为一种高精度的卫星定位技术,其基本的工作原理是通过发射的三颗或者三颗以上的卫星按照接收机发射的指令及技术要求,对在具体时刻、特定位置发出的导航信号进行分析,通过建立对应的数学模型,经过对应的计算和分析之后,将接收机所在的位置进行定位,最终获得精确的定位信息。
1.2gps的技术特点gps技术在实际的应用过程中具有这样几个方面的特点:①测量站之间不需要进行通视,简化了测量操作程序。
在传统的测量工作中,需要各个测量站之间进行相互通视,而且难度较大,在使用gps技术之后,测量站即使不通视也能够完成位置的精确选择,使得整个测量工作更加简单;②定位系统精度较高。
利用双频gps接收机测量得到的精度与红外仪测量精度相差无几,但是红外线测量仪在测量距离时精度较差,但双频gps测量方式则不受影响,在小于50km的基线距离上,其定位精度能够达到12×10-6m。
2gps技术在水利工程基础测量中的实际应用水利工程地基基础测量是保证整个水利工程实施整体精度和质量的先决条件,为了提高地基测量的精度,需要使用gps测量技术。
在地基测量的过程中,首先要做好地基测量技术方案的选择工作。
考虑到水利工程所在地项目环境通常比较恶劣,使用传统的地基地理测量技术不但难以实现,而且精度较差,价值实际的工程测量区域范围较大,通常达到几千平方米。
1前言毕业设计(论文)是本、专科教学计划中安排的一次系统、全面的综合性实践教学环节,是学生在校学习的最后、最重要的一个教学环节。
它既是对学生所学基础知识、基本理论、基本技能的复习、巩固和深化、提高,也是培养学生理论联系实际、创新意识和综合运用知识能力、综合分析和解决实际问题能力的重要环节;既是对学生综合素质教育与工程实践能力培养效果的全面检验,也是实现专业基本训练和人才培养目标、全面提高人才素质的重要过程。
在专业教学中占有重要的地位,对学生今后的发展具有重要的作用。
2毕业设计(论文)的目的与任务(1)通过毕业设计(论文)实践教学环节,使所学基础理论、专业知识和基本技能得到巩固、深化和提高,并有针对性地对学生进行设计方法、实验方法和研究方法的系统、全面的训练;(2)培养学生综合运用所学基础和专业基本理论、基本方法分析和解决工程和社会实际问题的能力,得到独立思考、独立工作能力的培养和提高;(3)进一步加强学生仪器操作、数据处理、工程设计、数字测绘、计算机应用等基本技能的训练;(4)加强学生文献检索、项目调研、综合分析、报告编写能力、书面及口头表达能力的培养,特别应加强学生获取新知识能力和创新能力的培养,提高学生学习他人经验和借鉴其它学科研究方法和悟性,提高学生处理新情况、解决新问题的应变能力;(5)使学生掌握技术设计及论文撰写的程序、方法和技术规范;(6)培养学生树立严谨求实的科学态度和吃苦耐劳、勤奋努力、勇于探索和团结协作的工作作风。
3毕业设计(论文)的组织管理根据学校的政策规定和工作需要,应成立毕业设计(论文)领导小组和毕业设计(论文)指导委员会。
3.1毕业设计(论文)领导小组组长:教学院长成员:各系主任、教务员3.2毕业设计(论文)指导委员会主任:教学院长委员:各学科带头人,教授、副教授若干人3.3毕业设计(论文)领导小组职责毕业设计(论文)领导小组的主要职责是确定毕业设计(论文)的题目和指导教师名单、安排毕业设计(论文)工作的进度和设计(论文)写作的检查、落实毕业设计(论文)的答辩日程、组织制订评分标准、确定毕业答辩小组成员、审查学生答辩资格、核定毕业设计成绩、进行毕业设计总结等等。
无人机倾斜摄影测量技术的毕业设计总结
无人机倾斜摄影测量技术是一种新兴的测绘技术,得到了越来越
广泛的应用。
本文通过对该技术进行深入研究,提出了一个符合实际
应用需求的无人机倾斜摄影测量系统设计方案,并对其进行了实现和
测试。
首先,本文分析了当前无人机倾斜摄影测量技术的发展概况和关
键技术要点,重点介绍了倾斜摄影测量的原理、无人机倾斜摄影测量
系统的组成和工作流程以及数据后处理流程等。
并结合实际场景,分
析了无人机倾斜摄影测量技术的应用优势和存在的问题。
随后,本文提出了一个针对农田测绘和道路交通监测等应用场景
的无人机倾斜摄影测量系统设计方案。
该方案主要包括无人机选型、
倾斜摄影测量传感器的选择和安装、数据采集和传输、数据处理和发
布等多个环节。
并且,本文针对系统设计中的重点问题进行了具体的
分析和解决方案。
在系统实现和测试方面,本文结合实际场景进行了系统的实际应
用测试。
测试结果表明,所设计的无人机倾斜摄影测量系统能够满足
农田测绘和道路交通监测等实际应用需求,并且具有较高的精度和可
靠性。
综上所述,本文通过对无人机倾斜摄影测量技术进行深入探究和
分析,提出了一个符合实际需求的无人机倾斜摄影测量系统设计方案,为无人机倾斜摄影测量技术的发展和应用提供了参考和借鉴。
摘要水准测量是确定房建工程中高程的方法之一,是高程测量中精度较高且常用的方法。
本次作业以西安市.........房建项目为实例,叙述了水准测量的基本原理和在房建中的实际应用。
总结了实际中发生的问题,详细的分析了问题产生的原因以及解决办法。
尤其是在倒标高的过程中出现的误差,通过自检、和同事分别讨论、仪器的检查,尽一切努力的使结果精确,从而保证施工质量。
在施工的过程中,始终坚守着测量从业者严谨务实的工作态度。
关键词:水准测量;水准仪;标高;误差第一章设计目的及任务概述1.1 设计目的设计的目的旨在较为全面的分析水准测量的实际应用中的过程和出现的问题,理论与实践相互结合,分析在测量的过程中产生的错误或误差,并分析和探讨找到改善或解决的办法。
总结提升,确保在下一次的施工作业中过程和结果得到进一步的提高,从而提升施工质量。
也为了提升自己的测量职业素质。
1.2 任务概述西安恒大悦龙台是中铁十二局建安公司承接的项目,是为恒大集团建设商品房;工程为四栋高层住宅。
在房建方面的水准测量主要为:车库独立基础开挖时的标高控制,楼层的高度控制,塔吊基准点的高程引导和监测,临时坡道硬化时的标高控制,基础垫层和阀板的标高控制。
测标高时第一次需用甲方给提供的原始标高倒,倒在施工现场的固定地方以方便下次使用,在施工现场的固定标高点需要定期复检,以防止因为标高改变而引起的施工质量问题。
在检测时需往返测量,以确认成果的准确性。
在车库独立基础开挖时,因为是挖掘机开挖,一定要实时跟进测量,确保不会超挖而破坏原有土质。
楼层的高度控制须在每次模板支好之后,浇筑混凝土之前测量一次,在混凝土浇筑完毕且混凝土养护完毕后在进行一次。
塔吊基准点的引导需在塔吊上找一个固定的位置进行观测并记录数据,并在固定的点做好明显标记,以便下次观测是减小错误的出现。
临时坡道的硬化测量时应根据施工方案进行高程的控制。
基础垫层和基础阀板的标高应根据图纸上的标高进行严格的控制,标高误差也要在施工规范内。
第二章水准测量2.1水准测量的原理水准测量是利用水准仪提供的水平视线来测定地面两点之间的高差,进而推算未知点高程的一种方法。
图1水准测量原理如图1所示,已知A点高程HA,需求B点高程HB,只要在A、B两点之间安置一台水准仪,并在A、B两点之间各竖立一根标尺,利用水准仪提供的一条水平视线在A尺上读书a,在B尺上读数b,即可计算A点之B点的高差为hAB=a-b设A点的测向B点,A点称为后视,a即为后视读数;B点称为前视,b即为前视读数。
高差总是后视读数减去前视读数。
当hAB为正时,表明B点高于A点;反之,表明B点低于A点。
计算高程的方法有一下两种:一种称为高差法,即由两点的高差计算未知高程HB=HA+hAB另一种称为仪高法(亦称视线高法),即由仪器的视线高程计算未知点高程。
先由A点的高程加后视读数a,得仪器视线高程Hi,即Hi=HA+a再由视线高程计算B点高程HB=Hi-b由上可见,两种方法的实质相同。
但仪高法往往安置一次仪器,可以测定多个未知点的高程,因而更适合于一般施工水准测量。
2.2水准测量的路线水准线路一般有三种形式;附合水准路线如图2所示,从已知水准点BM.A出发,经各待定高程点逐站进行水准测量,最后附合到另一已知水准点BM.A上,称为附合水准路线。
图2附合水准路线闭合水准路线如图3所示,从已知水准点BMA出发,经各待定高程点逐站进行水准测量,最后返回到已知水准点BMA上,称为闭合水准路线。
图3闭合水准路图4支水准路线支水准路线如图4所示,从已知水准点BM.A出发,经各待定高程点逐站进行水准测量,既不附合到另一已知水准点,也不返回原已知水准点,称为支水准路线。
2.3 水准测量的方法水准测量是利用一条水平视线,并借助水准尺,来测定地面两点间的高差,这样就可以由已知点的高程推算出来未知点的高程。
测定待测点高程的有高差法和仪高法两种。
水准测量根据点位、场地及作业条件,事先应布设一定的水准路线,既保证测量量具有足够的检核,又提高成果的精度。
在项目上施工的方法为观测后视,再观测前视,用后视点上已知高程加上后视读数减去前视读数就得到前视尺子底部点的高程。
第三章实例及分析3.1 项目中水准测量的实施1.车库独立基础开挖的标高控制在开挖车库独立基础时,需先确定好位置,然后在施工场地的固定原始高程点上倒标高,距离短时架设一次仪器即可,若距离过长则需按照实际情况增加转站次数,一般的方法为加后视得到仪器高度在减去所观测地方高程得到一个理论的前视读数A,然后进行观测,若前视读数大于A则需往上抬,若小于A则需继续往下挖;在开挖之前先测一次未开挖时的标高,确认往下挖多少,然后让挖掘机开挖;在挖掘机开挖时,要实时跟进测量,以免防止超挖,破坏原有土质结构。
在挖掘机施工完后,测一遍标高,如误差超过规定的范围内则人工休整,直至达到规范要求。
表1车库独立基础开挖过程数据表2.塔吊基准点的标高控制楼层的层高应在每次支好模板之后、打灰之前测一次,在混凝土浇筑完毕并且硬化之后在复测一次。
因为需要在塔吊上往上拉尺子往上引高度,所以每次测量是应先附合塔吊的基准点高程是否发生变化,然后在进行下一步操作,在塔吊的基准点往上拉固定的尺寸,然后以拉好之后的点作为后视点,在进行常规测量。
例如:8#楼塔吊基准点的标高为381.7,原有基准点高程为388.5,所以需要先检验塔吊基准点有无变化。
表2 塔吊基准点引导表在8#楼的塔吊标高381.7处往上拉4米尺子做记号,高程为384.7记为B。
一楼的设计标高为383.45,则需要在一楼架设仪器,一高程点B为后视,在楼面选取十个点测量,观察其数值。
塔吊基准点的高程引导和监测中,基准点的引测需要从原始基准点引,在塔吊上找到一个合适的点做明显的标记,算出其高程,之后在返测回去,以确保测量成果的准确性。
例如5#楼塔吊:在固定点标高386.47处引导,在塔吊上寻找一个合适的点测的其高程为389.844,下表为初次引导时的数据,还需返测一次。
表3楼面标高测量表表4塔吊基准点引导表表5塔吊沉降监测表:临时坡道的硬化测量时相对简单,按照施工方案的高差,按照其长短算出平均多少距离高差多少,施工期间控制好标高即可。
3.基础垫层和基础阀板的标高基础垫层和基础阀板的标高在控制时定后视的时候,须在固定高程点后视,在测量标高时前后左右间隔3至5米一个点,以确保测量结果的准确性,例如6#楼垫层:(后视高程为383)表6 基础阀板标高控制表3.2分析项目中水准测量误差产生的原因在车库独立基础开挖时,因为一整天的施工区域范围不会太大,所以基本上没有特殊原因一天只需架设一次仪器,这就导致了仪器可能会发生轻微的倾斜,从而影响测量结果;还有就是因为开挖的是土,其中含有水分,有一定的粘性,尤其是下雨过后没有干透的泥,非常容易粘在塔尺底部,从而使观测数值变小,使测量结果产生误差。
楼层的高度控制测量时,最容易产生误差的原因就是在塔吊上往上用尺子引高程点的时候,因为操作环境的原因,要么尺子拉不直,或者因为位置条件有限,人眼观测尺子的数值时有视觉误差。
塔吊基准点的高程引导和监测时,因为要从原始高程点引标高,距离过长,所以需要多次换站,在同一测站距离相差过大时就会产生误差;换站时,上一站的前视转为后视的时候需要转面,这是转动尺子180度会改变尺子的位置,从而导致高程改变,尤其实在凹凸不平的地方。
在常规监测时,每次监测的位置不固定或者不准确容易产生误差。
临时坡道的硬化测量时,仪器若不架设在平整区域,很容易发生误差;在实际观测是,因为是坡道,测量一条横向水平高度时在纵向发生一定的偏移就会造成测量结果较大的误差;在纵向隔距打标高是,距离相差较大时也会造成测量成果的较大误差。
基础垫层和基础阀板施工时标高的控制施工时,在沙石垫层上打标高会出现有些地方是石头,有些地方是沙子,造成放置尺子后下沉幅度不一样;楼的基础大样长65米、宽10米,所以若在长度方向架设仪器则会由于视距相差过大而引起较为大的误差。
3.3误差消除和减弱方法在车库独立基础开挖时,因为长时间不用挪动仪器,施工现场又有大型机械施工,会造成震动,会影响仪器,所以在每次观测前需要确认气泡是否居中,如果没有居中,则需重新整平和后视。
尺子底部容易粘泥则需在每次观测前清理掉尺子底部的泥土。
楼层的高度控制测量时拉尺子产生的误差解决需要把尺子拉直,拉尺子的人观测有视觉误差则需让一个不拉尺子的人来观测,尺子要拉紧,拉直。
塔吊基准点的高程引导和监测时产生的误差的解决需要在每个测站测量是拉线绳来控制仪器和两端尺子的距离,从而减小误差;在换站转动尺子时,需要给尺子底下提前放置尺垫来削减误差,尺子也需要扶直,这样就会尽可能的减小误差。
临时坡道的硬化测量时的测量误差,需现在坡道两边拉两条线绳并隔1米做个记号,从上往下测,把两头的标记出拉绳子用白灰撒出一条细线,每次放置尺子在白灰线上,可以更加准确的放置到理论上的同一水平线上,从而消减测量误差,使测量成果更加精确,给后期的施工带来便利。
基础垫层和基础阀板施工时标高的控制施工时,因为沙子和石头的松软度不同,则需在每次放尺子之前用脚踩一踩要测的地方;因为场地的长度过大,所以需要多选几个点架设仪器测量,所得数据进行平差处理;在测量时,还需要多选些点放尺子,最大程度的精确测量成果。
第四章结论本次在中铁十二局恒大悦龙台项目部,充分的把理论和实践相互结合。
在最初的施工过程中,也出现了很多平时注意不到的问题,造成了很多失误,影响力部分施工进度,也出现了些自己解决不了的问题,但最终通过与同事研究讨论,通过翻阅的查找资料并解决问题。
例如,在给塔吊做沉降观测时,复测时数据结果与上次的测量结果出现了较大的偏差,但是始终找不到问题,而且操作过程和以往都一样,在仪器的整平、尺子要扶直、转点放尺垫等问题上都有注意,在查找资料还没有解决的情况下,最后通过对有经验的同事发现并解决了问题。
测量是一项严谨的工作,测量从业者需要在每一次的测量中都拿出实事求是、工作严谨负责的态度。
打造百年工程中测量很重要。
开始才来的时候有时候工作烦心的时候就想着随便搞搞算了,但是每次有这种想法的时候就想到我们的行业素质,然后再苦再累也要好好完成工作。
测量也是一个博大精深的行业,以前以为就是那么点东西,来工地之后才慢慢的知道了,在测量这条路上,我才刚刚踏上了行程。
谢辞时光如箭,光阴如梭。
现在还清晰的记得第一次来学校的那一幕,犹如昨日。
在学校的日子里,我经历了青春岁月里最美好的一段时间;有同学的陪伴之景,有老师的授业之情。
在这里我要感谢鱼老师和林老师的深深教诲,让我受益良多。
尤其是鱼老师那渊博的专业知识和那敬业的教学态度让我深深的佩服。
尤其是在参加测量大赛,那是我专业知识水平的一次重大提升,在训练期间,是老师们的悉心指导才能有的。