基于无线射频传输的大型车辆智能辅助倒车系统设计
- 格式:pdf
- 大小:367.61 KB
- 文档页数:5
超声波倒车系统设计的参考文献超声波倒车系统设计的参考文献超声波倒车系统一直是汽车行业中备受关注的一个技术,它能够有效地辅助驾驶员进行倒车,并减少因盲区造成的交通事故。
随着科技的不断进步,超声波倒车系统的设计也越来越智能化和精准化。
本文将从多个角度对超声波倒车系统的设计进行全面评估,并探讨其在汽车行业中的应用前景。
1. 超声波技术的原理和特点超声波是一种高频声波,其频率通常超过20kHz,无法被人耳听到。
超声波倒车系统利用超声波传感器发射出的超声波并接收其回波,从而实现对车辆周围环境的探测和测距。
这种技术在倒车过程中能够及时发现障碍物,并发出警告信号,帮助驾驶员避免碰撞。
2. 超声波倒车系统的设计要点在设计超声波倒车系统时,需要考虑一系列要点,包括传感器类型选择、数据处理算法、报警系统设计等。
传感器类型选择包括单元超声波传感器和多元超声波传感器,其工作原理和适用范围不同,需根据具体车辆情况进行选择。
数据处理算法则是超声波倒车系统设计中的关键环节,其精准度和稳定性直接影响到系统的实际效果。
报警系统设计也需要考虑驾驶员接受信息的方式,如声音、光线或者振动等。
3. 相关研究和案例分析不同厂家和研究机构在超声波倒车系统的设计上都进行了大量的实验和研究。
某汽车制造商采用了多元超声波传感器,并通过深度学习算法对传感器数据进行处理,实现了智能化的倒车辅助功能。
另外,某研究机构则在超声波倒车系统中应用了激光雷达技术,使系统在复杂环境下能够更加准确地探测障碍物。
4. 超声波倒车系统的未来发展随着无人驾驶技术的发展和智能汽车的兴起,超声波倒车系统将会迎来更多的发展机遇。
未来,我们可以期待超声波倒车系统在智能停车、自动泊车等方面发挥更加重要的作用,为汽车行业的安全驾驶和智能化发展提供更多可能性。
总结回顾通过本文的全面评估,我们对超声波倒车系统的设计有了更深入的了解。
从超声波技术的原理和特点、设计要点、相关研究和案例分析,到未来发展趋势的探讨,我们对超声波倒车系统有了更全面、深刻和灵活的认识。
毕业论文--基于射频识别技术的门禁系统设计毕业论文基于射频识别技术的门禁系统设计作者姓名:专业、班级:学号:校内指导教师:校外指导教师:完成日期:黄河水利职业技术学院自动化工程系摘要本文研究一种基于射频识别(RFID)技术的门禁系统。
(1)研究了基于射频识别技术的门禁系统的总体设计,设计了射频IC读卡器的电路原理图。
读卡器主要由射频天线、读卡模块、RS485通信接口及单片机控制系统组成,(2)深入研究RFID 天线的EMC过滤器、接收电路以及天线匹配电路等构成并设计优化了天线耦合电路。
(3)门禁终端通信采用RS485总线,同时结合门禁读卡器研究了RS485的网络拓扑结构,通过RS485接口与PC机组成通信网络系统。
(4)设计单片机的包看门狗、液晶显示、数据存储和实时时钟等在内的外围模块电路。
(5)采用模块化软件设计方法,根据MF RC500的特性,系统地对MF RC500芯片的操作流程进行研究,设计主程序的流程图和各个模块子程序。
(6)并建立一个Access数据库用来存储用户信息。
上位机与下位机之间的通信采用串口通信,选用MAX232CPE芯片完成上、下位机之间的通信。
关键词:门禁系统;射频识别;MF RC500;非接触式IC卡;串口通信目录摘要 (I)引言 (1)第1章门禁系统总体设计方案 (1)1.1 门禁系统总体系统设计 (1)1.2 门禁系统硬件设计 (2)1.3门禁系统软件设计 (3)第2章门禁系统主要硬件电路设计 (3)2.1 门禁主控器 (3)2.2源模块设计 (4)2.3射频控制模块设计 (5)2.3.1 射频识别系统的典型结构 (5)2.3.2射频识别系统原理 (6)2.4 RS485通信模块设计 (8)2.4.1R S485接口 (8)2.4.2R S485网络拓扑结构 (10)2.5 液晶显示模块设计 (12)2.5.1 LCD1602介绍 (12)2.5.2 引脚功能介绍 (13)2.5.3 寄存器选择功能及指令功能 (13)2.6实时时钟的硬件设计 (13)2.6.1 实时时钟的接口 (14)2.6.2 时钟数据传输的控制 (15)2.6.3 时钟数据传送方式 (15)2.7电平转换电路设计 (16)2.7.1电平转换芯片 (16)2.7.2 MAX232芯片 (16)2.7.3电路连接图 (17)2.8报警电路设计 (17)第3章IC卡与门禁主控器的选择 (18)3.1非接触式IC卡的选择 (18)3.2门禁控制电路 (19)3.3 读卡器选择 (20)第4章门禁系统软件设计 (21)4.1系统总体程序流程设计 (21)4.2 射频控制模块 (22)4.4 通讯模块 (25)4.5显示模块 (29)4.6上位机设计 (30)4.6.1 上位机程序流程图 (30)4.6.2用户登录界面设计 (31)4.6.3门禁系统界面设计 (33)第5章系统调试及结果分析 (34)5.1 系统调试 (34)5.2 结论分析 (35)参考文献 (35)附录部分电路原理图及PCB图 (38)致谢 (39)引言随着我国社会主义市场经济的深入发展和未来知识经济时代的临近,门禁系统作为一项安防措施,将会形成更大规模的产业。

基于RFID智能停车场收费管理系统设计与实现
喻彩丽;赵诣琛;李亮
【期刊名称】《信息记录材料》
【年(卷),期】2022(23)5
【摘要】为提高停车场的经济效益和运行效率,实现自动化、智能化的管理,结合“防疫无接触管理”的趋势要求设计了一种基于RFID智能停车场收费管理系统。
本系统设计主要以STC89C52单片机为控制核心,RC522无线射频模块、红外避障传感器模块、电源模块、蜂鸣器模块等硬件设计完成车辆的自动进出及交互功能,结合上位机,12864液晶模块及按键模块实现车辆信息查询及收费功能。
结果表明,系统实际运行可满足无接触管理要求,实现了停车场的自动化管理。
【总页数】4页(P173-176)
【作者】喻彩丽;赵诣琛;李亮
【作者单位】汕尾职业技术学院;塔里木大学
【正文语种】中文
【中图分类】TP311
【相关文献】
1.基于RFID的智能停车场管理系统设计
2.基于RFID的智能停车场管理系统设计与实现
3.基于RFID的网络停车场管理系统设计与实现
4.基于RFID的智能停车场管理系统设计
5.基于RFID的智能停车场管理系统设计
因版权原因,仅展示原文概要,查看原文内容请购买。
引言2008年以来,随着京津城际、武广、京沪等客运专线的开通.中国逐步拥有全世界运营速度最快、里程最长的高速铁路网。
与此同时.城轨车辆正在迅速增加,如北京、上海、深圳、广州、天津、长沙、武汉、无锡等近30个城市已经或者正在修建城市轨道交通,随着轨道车辆的增多以及运行速度的提升,用户对设备的可靠性、可用性、可维护性、安全性(RAMS)和生命周期成本( LCC)的要求也越来越高,因此很有必要提高轨道交通装备的智能化水平。
轨道交通装备智能化的技术源头可追溯到上世纪70年代后期,微处理逐步应用到机车车辆单个设备的控制上,譬如西门子、BBC在80年代初把8086微处理器应用于机车的传动控制;南车株洲电力机车研究所有限公司在80年代前期开展了z80单板机控制静止劈相机的研究、试验。
随着需要协同控制的对象增多,产生了基于串行通信的层次化列车通信网络,并于1999年6月发展为IEC 61375列车通信网络标准。
到目前为止,轨道交通车载电气设备的控制、状态监视、故障报警大部分都基于列车通信网络WTB/MVB进行。
自进入本世纪之后,随着现场总线网络、列车骨干网(Ethernet Train Backbone,ETB)、列车编组网(Ethrmt Consist Netwok. ECN)、无线通信、物联网等诸多技术的应用,轨道交通装备智能化正在加速发展。
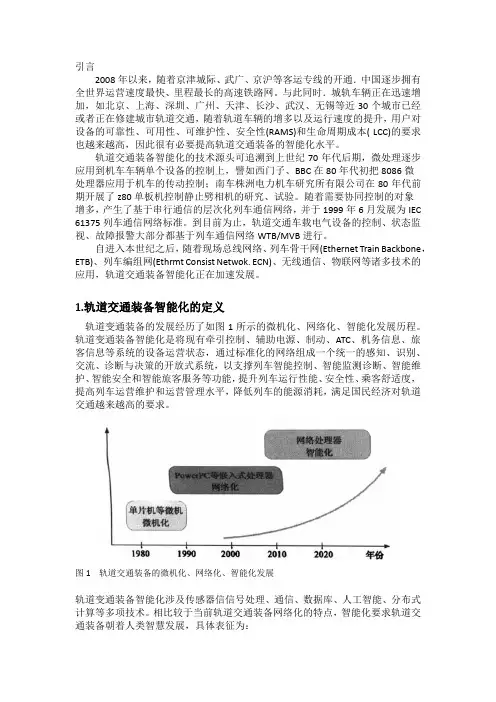
1.轨道交通装备智能化的定义轨道变通装备的发展经历了如图1所示的微机化、网络化、智能化发展历程。
轨道变通装备智能化是将现有牵引控制、辅助电源、制动、ATC、机务信息、旅客信息等系统的设备运营状态,通过标准化的网络组成一个统一的感知、识别、交流、诊断与决策的开放式系统,以支撑列车智能控制、智能监测诊断、智能维护、智能安全和智能旅客服务等功能,提升列车运行性能、安全性、乘客舒适度,提高列车运营维护和运营管理水平,降低列车的能源消耗,满足国民经济对轨道交通越来越高的要求。
图1 轨道交通装备的微机化、网络化、智能化发展轨道变通装备智能化涉及传感器信信号处理、通信、数据库、人工智能、分布式计算等多项技术。
射频识别技术应用题单选题100道及答案解析1. 射频识别技术的英文缩写是()A. RFIDB. RIFDC. RFDID. RDFI答案:A解析:射频识别技术的英文是Radio Frequency Identification,缩写为RFID。
2. 以下哪个不是射频识别系统的组成部分()A. 电子标签B. 读写器C. 数据库D. 传感器答案:D解析:射频识别系统通常由电子标签、读写器和数据库组成,传感器不是其必要组成部分。
3. 射频识别技术中,电子标签的作用是()A. 存储数据B. 读取数据C. 处理数据D. 传输数据答案:A解析:电子标签用于存储被识别物体的相关信息和数据。
4. 读写器的主要功能是()A. 写入数据B. 读取数据C. 既写入又读取数据D. 以上都不是答案:C解析:读写器能够对电子标签进行数据的写入和读取操作。
5. 射频识别技术的工作频率不包括()A. 低频B. 中频C. 高频D. 超高频E. 特高频F. 极高频答案:F解析:射频识别技术的工作频率通常分为低频、中频、高频、超高频和特高频,不存在极高频。
6. 低频射频识别系统的工作频率范围是()A. 30kHz - 300kHzB. 300kHz - 3MHzC. 3MHz - 30MHzD. 30MHz - 300MHz答案:A解析:低频射频识别系统的工作频率一般在30kHz - 300kHz 之间。
7. 高频射频识别系统的工作频率范围是()A. 3MHz - 30MHzB. 30MHz - 300MHzC. 300MHz - 3GHzD. 3GHz - 30GHz答案:A解析:高频射频识别系统的工作频率通常在3MHz - 30MHz 范围内。
8. 超高频射频识别系统的工作频率范围是()A. 300MHz - 3GHzB. 3GHz - 30GHzC. 30GHz - 300GHzD. 300GHz - 3THz答案:A解析:超高频射频识别系统的工作频率在300MHz - 3GHz 之间。


煤矿井下智能交通控制系统摘要:本文介绍了煤矿井下智能控制系统,该系统采用无线通讯技术、PLC 控制技术和传感器检测技术,实现对井下的智能化交通管理,可以达到对井下车辆的统一调度、安全监管,提高安全生产的目的。
关键词:井下交通路口;智能化控制;PLC系统煤矿辅助运输的主要方式为无轨胶轮车、无极绳绞车、卡轨车、提升机等,其中无轨胶轮车运输已得到了广泛的应用。
近年来,随着无轨胶轮车运输方式的的普遍应用,胶轮车在井下的运行安全也日趋突出了。
井下交通事故的频繁发生不仅严重制约了我国煤矿的高效安全开采,而且造成了重大的人员伤亡和财产损失。
由于井下巷道窄、视线受限,行车状况复杂,为保证车辆运行安全,提高效率,对井下辅助运输车辆进行监测和调度控制,进行交通管制以保证运行畅通。
实现了井下运输车辆调度的自动化。
井下交通管理系统是针对井下运输设计的具有车辆行驶监控、车辆信息监测及交通调度管制功能的系统。
通过目前最先进的射频、wifi等通信形式,达到对运行车辆的红绿灯指示,LED灯箱指示,车辆信息监测的功能等。
该系统简化了辅助环节,减少了事故点,提高了工效和安全性,达到减员增效的目的。
1.系统组成煤矿井下智能交通管理系统是应用最新的科技发展成果,铺设的一套井下无轨胶轮车监控系统。
该系统基于3G网络或者wifi网络,通过红绿灯交通管理及车辆信息采集,有效增强车辆运行的规范性,杜绝不安全行为,达到提高车辆运行的效率,节约运行成本,优化管理方式的目的。
井下交通管理系统包括路口红绿灯控制、车辆测速与定位、闯红灯拍照和定点测速拍照、车辆动态管理、驾驶员管理、信息发布等子系统。
2.系统传输型式2.1.无线传输模式系统主体传输采用无线型式,包括数据的传输和设备的连接。
系统要对整个巷道进行无线覆盖,双向板式天线覆盖范围400米,根据巷道的实际长度设置一定数量的无线WIFI基站,就地AC127V供电。
通过无线WIFI 基站的布置实现巷道的全面无线覆盖,经由wifi网络将各个路口的车辆信息系统及摄像头所拍摄的照片经主控制器统一上传到井上车辆管理中心服务器。
GPS设计技术难点与解决方案篇一:GPS巡检系统技术设计方案慧友安智能巡检系统功能介绍一、系统构成、详细介绍(一)系统构成:主要由以下几部分组成:1、硬件设备:GPS巡检器、射频信息钮;2、系统软件:巡检管理系统平台(二)详细介绍1、硬件设备:GPS巡检器GPS巡检器安卓4.0以上操作平台、4寸电容触摸屏、1.2G双核高速处理器、1G运行内存、4G存储空间、高清图像采集模块。
包括:GPS卫星定位模块、GPRS通讯模块、射频采集信息模块、图像采集模块、语音模块。
文字描述巡检器的操作和功能,GPS巡检器第一次与管理系统平台连接时需要输入用户名和密码,以后就可直接登陆。
GPS 巡检器可以支持脱机工作、在没有网络信号或SIM卡欠费不能通讯时可以正常巡检不影响巡检工作。
在人员靠近一个巡检点位50米至500内可以语音播报已将到达的地方详细信息,播报距离可以在管理平台用户自行设定。
巡检人员读卡信息钮后巡检器会语音播报这个巡检点的相应信息,方便人员巡检工作。
在发生破损或事故时可以对现场进行文字、图像或视频记录现场情况并及时发送到服务上。
如果遇到特殊事件可以在点击“一键报警”系统制动会将报警信息发送指定人员的手机上并在监控页面直接弹出报警信息位置和内容。
设备介绍:1、第三代GPS卫星定位模块,准确定位,误差小于等于10米。
2、 GPRS通讯模块兼容中国联通、中国移动2G、3G网咯平台。
3、射频信息采集可以读取最新NFC技术地点卡。
4、自动读卡,在巡检器离巡检点2到5厘米是自动读取,非常方便。
5、500万像素摄像头可以清楚拍摄图片和视频信息。
还有红外灯、闪光灯辅助采集设备。
6、语音播报模块可以播报文字信息。
GPS巡检器效果如下图:1、巡检器操作界面2、读取巡检提示事件文件输入界面图像采集效果一键报警操作界面考勤打卡射频信息钮:采用最先进的NFC技术,选用飞利浦芯片。
PVC 材质完全密封封装。
读卡稳定、耐热、抗冻、防水、防震、抗电磁波;NFC信息钮图片2、巡检管理系统平台采用BS网络框架设计模式,无需安装查询端可以直接查看,在电脑、平板、手机等移动平台上就能直接使用。
智能网联汽车140题(附答案)1. ACC 的目的是通过对车辆()运动进行自动控制,以减轻驾驶员的劳动强度。
A. 横向B. 纵向C. 泊车D. 变道正确答案:B2. 自适应巡航控制不能通过控制()实现与前车保持适当距离的目的。
A. 发动机B. 传动系统C. 制动器D. 转向正确答案:D3. 车间距是指()。
A. 前车尾部与本车头部之间的距离B. 前车尾部与本车尾部之间的距离C. 前车头部与本车尾部之间的距离D. 前车头部与本车头部之间的距离正确答案:A4. 以下不属于倒车雷达结构组成的是()。
A. 超声波传感器B. 控制器C. 蜂鸣器D. 图像传感器正确答案:D5. 关于超声波说法错误的是()。
A. >20kHz 的声波B. 沿直线传播C. 穿透力弱D. 遇到障碍物会产生反射波正确答案:C6. 先进驾驶辅助系统主要分为两大类:信息辅助类和控制辅助类,以下不属于信息辅助类的是()。
A. 前方交通穿行提示B. 盲区监测C. 智能限速提醒D. 交通拥堵辅助正确答案:D7. 自动紧急制动的简称为()。
A. AEBB. EBAC. ESAD. LKA正确答案:A8. 盲区监测的简称为()。
A. LCWB. BSDC. FCWD. AVM正确答案:B9. 智能决策层的主要功能是接收环境感知层的信息并进行融合,对道路、车辆、行人、交通标志和交通信号等进行识别、决策分析和判断车辆驾驶模式及将要执行的操作,并向()输送指令。
A. 环境感知层B. 信息融合层C.控制和执行层D. 以上都不是正确答案:C10. 激光雷达以激光作为载波,激光是光波段电磁辐射,波长比微波和毫米波()。
A. 长B. 短C. 一样长D. 以上均不对正确答案:B11. 关于激光雷达说法错误的是()。
A. 全天候工作,不受白天和黑夜光照条件的限制B. 可以获得目标反射的幅度、频率和相位等信息C. 不受大气和气象限制D. 抗干扰性能好正确答案:C12. CAN 总线网络传输的帧中用于接收单元向发送单元请求主动发动数据的帧为()。
基于物联网技术的智能停车场系统设计与实现随着城市化的不断发展,车辆数量激增,停车难问题愈加突出,传统的停车场管理方式已经难以满足人们的需求。
因此,基于物联网技术的智能停车场系统应运而生。
本文将从系统的设计与实现两方面探讨智能停车场系统的具体解决方法。
一、系统设计1.系统架构设计智能停车场系统由硬件和软件两部分组成,其中硬件主要包括:(1)入口控制设备:包括车辆识别相机、车牌识别仪和显示屏等设备,用于识别车辆并显示相关信息。
(2)停车位检测设备:使用传感器检测车位是否被占用,并与数据库相连,更新车位占用状况。
(3)光电控制设备:安装在车道上,用于检测车辆进入或离开停车场,以此控制车道闸口的升降。
软件方面,包括:(1)后台管理系统:用于管理整个停车场的车辆状态、车位分配等信息。
(2)移动端APP:用户通过APP查询停车场的空余车位情况,预订车位并支付停车费用。
2.功能设计(1)车辆进出场管理:通过入口控制设备和光电控制设备进行车辆识别和闸口的升降控制,实现车辆进出车场的管理。
(2)车位管理:停车位检测设备通过传感器检测车位状况,将车位的使用状况实时更新到数据库中,后台管理系统调配车位资源,提高停车位的利用率。
(3)预订系统:用户通过移动端APP预订车位,系统自动分配车位,用户到达车场后自动识别车牌号码并开启闸口升降,无需手动停车。
(4)支付系统:用户通过移动端进行停车费用的支付,支持线上支付、线下支付等多种支付方式。
二、系统实现智能停车场系统需要安装一定数量的硬件设备和软件系统,建立一个完整的网络架构,并将其整合在一起实现系统的功能。
具体实现步骤如下:1.硬件设备的安装和调试首先安装和调试各个硬件设备,包括入口控制设备、停车位检测设备和光电控制设备,并通过各种方式将其与后台管理系统、移动端APP相连接。
2.软件系统开发针对智能停车场系统的各种功能,进行软件系统开发,包括后台管理系统和移动端APP。
后台管理系统需要实现车位分配、车辆进出场管理、停车费用计算等等功能。
一、车联网体系车联网是物联网在交通这个特殊行业的典型应用。
在车联网体系参考模型中主要包括三层:数据感知层、网络传输层和应用层。
1.数据感知层数据感知层承担车辆与道路交通信息的全面感知和采集,是车联网的神经末梢,通过传感器、RFID(射频)、车辆定位等技术,实时感知车况及控制系统、道路环境、车辆当前位置、周围车辆等信息,实现对车辆自身属性以及车辆外在环境,如道路、人、车等静、动态属性的提取,为车联网全面、原始的终端信息服务。
数据感知层的数据来源包括多个部分,一是车辆自身的感知,例如速度、加速度、位置、横摆角加速度等,主要通过车内总线、GPS和其他感知设备来实现;二是对周围车辆行驶状态的感知,比如周围车辆的位置、方位、速度、航向角,这就需要车间通信,以及道路环境的感知,比如交通信号状态、道路拥堵状态、车道驾驶方向、这就需要车路通信,每辆车和路边设施单元需要把自己感知到的信息分发出去;三是通过后台或第三方应用交互来获取更多的数据,比如天气数据等。
2.网络传输层为了车与车、车与路、车与人、车与云(车与后台中心)之间实现信息共享,这就需要考虑通信协议的制定。
网络层通过制定满足业务传输需求的能够适应通信环境特征的网络架构和协议模型,在一种网络环境下整合不同实体所感知到的数据,通过向应用层屏蔽通信网络类型,为应用程序提供透明的信息传输服务。
通过云计算、虚拟化等技术的综合应用,充分利用现有网络资源,为上层应用提供强大的通信支撑和信息支撑服务。
3.应用层车联网的各项应用必须在现有网络体系和协议基础上,兼容未来可能的网络拓展功能。
应用需求是推动车联网发展的原动力,车联网在实现智能交通管理、车辆安全控制、交通事件预警等功能的同时,还应为车联网用户提供车辆信息查询、信息订阅、事件告知等各类服务功能。
同时可以运用云计算平台,面向政府管理部门、整车厂商和信息服务运营企业以及个人用户在内的不同类型用户,提供汽车综合服务与管理功能,共享汽车与道路交通数据,从而支持新型的服务形态和商业运营模式。